汽車ADAS技術中的傳感器應用
2018-08-28 03:15:53梁海潔
求知導刊 2018年13期
梁海潔
摘 要:文章介紹了汽車ADAS技術及其關鍵設備傳感器的使用及特點,分析了傳感器在ADAS技術中的重要作用及發展情況,對ADAS技術相關內容作了概述,并結合實際,對感應器在ADAS技術中的應用展開了研究。
關鍵詞:ADAS;傳感器;數據融合
中圖分類號:U463.6? ??文獻標識碼:A
一、ADAS技術及其原理
先進駕駛輔助系統(Advanced Driver Assistant System),簡稱ADAS,是利用安裝于車上的各式各樣的傳感器,在第一時間收集車內外的環境數據,進行靜、動態物體的辨識、偵測與追蹤等技術上的處理,從而能夠讓駕駛者在最快的時間察覺可能發生的危險,以引起注意和提高安全性的主動安全技術。ADAS 采用的傳感器主要有攝像頭、雷達、激光和超聲波等,可以探測光、熱、壓力或其他用于監測汽車狀態的變量,通常位于車輛的前后保險杠、側視鏡、駕駛桿內部或者擋風玻璃上。早期的ADAS 技術主要以被動式報警為主,當車輛檢測到潛在危險時,會發出警報提醒駕車者注意異常的車輛或道路情況,對于最新的ADAS 技術來說,主動式干預也很常見。
ADAS系統工作原理如下圖所示。
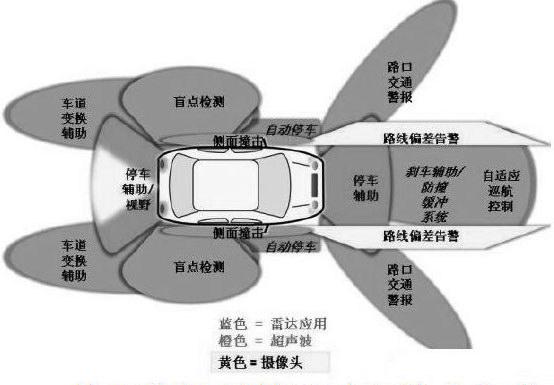
其工作原理是通過安裝在汽車上的各類傳感器采集路面信息,通過圖像處理、圖像分析等技術對路面情況進行分析,發現危險情況時會對駕駛員做出預警、介入車輛控制等。
ADAS系統的組成主要分成三個部分:傳感器、ECU、執行器。
傳感器主要是對行車的道路環境進行數據的采集。ECU就是電子控制單元,對傳感器采集回來的數據進行分析處理,判斷行車狀況、道路狀況。控制器判斷出來有危險的狀況,就向執行器輸出控制信號,由執行器來完成相應的安全預防動作。
汽車高級輔助駕駛系統通常包括導航與實時交通系統TMC、電子警察系統ISA、自適應巡航ACC、車道偏移報警系統LDWS 、車道保持系統、碰撞避免或預碰撞系統等多種系統。
二、ADAS傳感器及發展
ADAS高級輔助駕駛系統,簡單來講就是緊急情況下在駕駛員主觀反應之前作出主動判斷和預防措施,來達到預防和輔助的作用。據統計,ADAS可以將事故發生率降低70%。ADAS是怎么知道危險、預防危險的呢?這就不得不提到ADAS的實現高級輔助技能的核心部件:傳感器。
對外部環境的探測,傳感器大概是這樣“進化”的:
超聲波雷達:價格低廉,可探測2米(早期)到5米(當前)范圍內的障礙物,車上用的一般是收發一體的探頭,少的裝4個在后保險杠,多的裝12個(前后各6個)。主要能夠實現泊車時的障礙物報警。應用5米探測范圍的超聲波雷達可以實現自動輔助泊車。但其響應速度慢,精度低,探測距離小。
毫米波雷達:根據頻率分一般有24GHZ以及77GHZ的產品,77HZ頻率主要為車載設備劃分,因此越來越多的雷達會應用77GHZ頻率。根據探測距離分有長距離250米,中距離150米以及短距離40~70米。雷達發射經過調制的無線電波,對金屬有很好的探測,根據發出和收回的時間差可計算出目標距離,根據多普勒效應計算相對速度,這兩項也是雷達算得最準的參數。但其對目標水平的探測精度較低且無法識別目標類型。最早的ACC就應用毫米波雷達,但只能工作在30千米/小時以上。
攝像頭:有單目和雙目攝像頭之分,現在普遍應用的是單目攝像頭,主要用于目標類型的判斷,以及車道線識別。目前行業老大當屬Mobileye,其EyeQ3是目前量產車中所配制的最高端的產品。少數車配以雙目攝像頭,其對目標的探測有深度信息,但由于成本高,且這些信息對比單目并未有質的飛躍很少被采用。主要能夠實現車道偏離報警、車道保持、對行人和車輛的AEB等。其主要問題在于受環境影響非常大、雨雪霧沙塵霾都會使識別能力降低,抵抗強光的能力也不夠強。對模棱兩可的目標沒法有效識別,對特殊目標也不容易正確分類等。
激光雷達:激光雷達并非最近才出現,很早以前就有車用激光雷達如ACC和AEB,但都是固定發出少線的類型,這里要說的是激光掃描雷達,包含機械的旋轉相機構,比如Ibeo和Velodyne。固態雷達目前還在研發階段,在車上應用尚需時日。激光雷達通過紅外激光能夠精確測距,Velodyne的FOV是360度,Ibeo差不多110度,法雷奧的量產產品在140度左右,垂直方向從4線到64線不等。激光掃描雷達是對周圍障礙物位置形狀最為精確的探測傳感器,其數據包含探測到的點的距離和反射強度。反射強度還可以用于車道線的識別。其缺點是,Velodyne成本高,且一直不做目標識別算法。Ibeo的產品無論硬件還是算法仍不成熟,因此在應用上還存在諸多困難。
三、傳感器數據融合
從當前的技術來看,每種傳感器都有局限,有些是傳感器本身,有些是算法還不夠先進。因此,多傳感器相備份和補充是必不可少的。
例如,對于一個目標,一輛車。用雷達取得的距離,相對速度,用攝像頭識別類型和其與車道線位置關系,用激光識別其外形輪廓。構成一個目標完整的信息,之后再送入處理器運算。這就完成了多傳感器數據融合的每一步,但實際會復雜得多,處理這些屬性時的權重也需要根據不同情況判定。
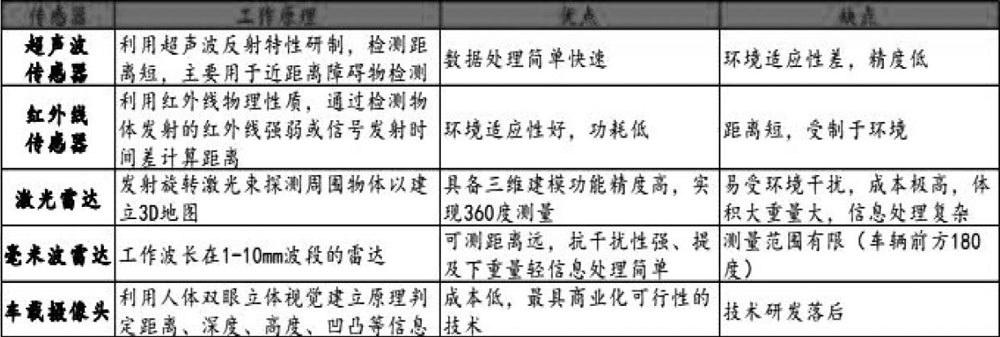
上表是一張對不同類型傳感器工作原理及優缺點的介紹。通過對比,我們可以看到,不同傳感器都有各自的優缺點,每一傳感器有其各自的適用范圍,每種方式的傳感器都有其弱點。
ADAS利用高性能信號處理技術,并部署各種基于雷達和視覺的高級駕駛輔助系統。目前大多數先進駕駛輔助系統功能基本上是其自有獨立系統,具有雷達、攝像頭和超聲波等最常用的傳感,可以探測光、熱、壓力或其他用于監測汽車狀態的變量。因此在未來,如果要實現全天候、高可靠性的應用,多傳感器的融合將會是一種必然。
四、ADAS芯片技術
ADAS各項功能的實現,需要高性能的數據處理芯片支持。而隨著技術的發展、功能的升級,傳統車用芯片的性能已經無法滿足龐大的計算量需求,特別是到無人駕駛階段,這就要求芯片企業不斷開發更高能效的車載芯片。現有的芯片方案主要有MCU、ARM、DSP、GPU、FPGA、ASIC等。
參考文獻:
[1]張 翔.2014年汽車ADAS技術的最新進展[J].汽車電器,2014(8).
[2]孫 燁.我國汽車產業智能化再造——以ADAS為例[J].工業技術創新,2015(6).
