可穿戴式助力外骨骼特征動作動力學研究
2018-08-28 09:12:40楊小平許鴻謙
機械設計與制造 2018年8期
張 斌,劉 放,楊小平,許鴻謙
1 引言
隨著現代科技的不斷發展,人類對于生產效率的要求不斷提高。例如就工廠車間內的生產效率而言,一方面機器不能完全代替人類進行工作,另一方面人體機能的極限限制著工廠生產效率的提高,外骨骼的出現便很好地解決了這一問題[1]。外骨骼是一種可以讓人體穿戴的助力輔助裝置,主要目的是要增強人類的能力。例如將它配備到作戰的士兵身上,可以減少士兵由于長途跋涉帶來的體能消耗,還能使其攜帶更多的武器[2]。由此可見,外骨骼有很好的應用前景。
近年來,國內外許多專家學者都對外骨骼做了許多詳盡的研究。Thetechnical trend of theexoskeleton robotsystemfor human power assistance提出基本的外骨骼概念源自于基于生物系統的人機智能系統,闡述了外骨骼系統中的關鍵技術應從生物力學,系統結構模型,人機交互,控制策略這幾方面研究[3]。Application of EMGsignalsfor controllingexoskeleton robots設計出了兩種不同的助力外骨骼,一種是具有單自由度的膝蓋外骨骼,一種是基于EMG信號控制具有16個關節自由度的手部外骨骼[4]。Design of an electricallyactuated lower extremityexoskeleton設計出了一款以電為動力的BLEEX外骨骼,并與之前設計出的外骨骼樣機進行對比,得出了電動外骨骼在工作效率以及額定負重載荷等方面都顯示出較強的優越性[5]。Measuringthe Improvement of the Interaction Comfort of a Wearable Exoskeleton提出了基于腦電波圖信號對一個9自由度系統的外骨骼機器人進行研究,提出了一種能夠有效控制復雜人機交互系統的控制方法,能夠提高人體的舒適度以及穿戴者的安全性[6-7]。Construction and nanomechanical propertiesof theexoskeleton of thebarnacle,Amphibalanusreticulatus通過對助力外骨骼在9名志愿者身上進行具體試驗,分析得到了助力外骨骼幫助人類行走過程中能夠減少能耗9%,并研究了人體在踝關節處對外骨骼的適應性[8-9]。Ergonomic contribution of ABLEexoskeleton in autom-otive industry以法國設計的ABLE外骨骼為研究對象,經過在生產車間流水線上的實驗,得出了ABLE外骨骼可以減輕由于人工操作可能產生的肌肉不適,為人體減少了38.9%的能量消耗[10]。
以上的研究主要集中在對外骨骼的結構設計,控制及實驗分析等方面,外骨骼為了滿足能夠承載重物進行工作的要求,對其動力部分驅動力與力矩的研究在整個外骨骼的設計中就顯得十分必要。選取雙膝蹲-起立特征動作,通過對特征動作進行運動學及動力學分析,對外骨骼各個關節處所需驅動力矩進行具體分析計算。
2 特征動作運動分析及動力學模型建立
2.1 特征動作運動分析
2.2 人體運動基本面的選擇
人體的運動是通過各個關節不同的動作而復合而成的復雜空間運動,因此需要對人體的動作進行分析。為了研究人體運動學,臨床醫學和人機工程學通常使用參考坐標系,如圖1所示。包括額狀面、矢狀面和水平面。雙膝蹲-起立動作整個過程人體的動作基本都在矢狀面內完成,在額狀面內的擺動很小,我們可以把人體下肢的運動投影到矢狀面內進行分析。
2.3 雙膝蹲-起立人體動力學模型建立
雙膝蹲-起立動作主要是由髖關節、膝關節和踝關節以及大腿、小腿和軀干的肌群共同作用完成。我們可以把髖關節、膝關節以及踝關節處的角度作為特證角。把骨骼以及軀干簡化為均質桿件,各個關節簡化為旋轉副。雙腿在運動過程中的變化趨勢相同,左腿與右腿對稱,我們選取右腿進行分析。以踝關節處為坐標原點,建立直角坐標系,可以得到雙膝蹲-起立人體動力學模型,如圖1所示。人體下蹲姿勢對照圖,如圖1(b)所示。其中A、B、O、C分別代表膝關節、踝關節、髖關節和肩部,AB為小腿,OA為大腿,OC 為軀干。θ1、θ2、θ3為其三個特征角,θ1為軀干與豎直方向的夾角;θ2為大腿與豎直方向的夾角;θ3為小腿與水平方向的夾角。l1、l2、l3為軀干、大腿、小腿的長度。

圖1 雙膝蹲下肢動力學模型Fig.1 Knees Squatting Lower Extremity Kinetic Model
3 特征動作運動學分析及各關節處動力學分析
3.1 特征動作運動學分析
利用光學動作捕捉系統來對雙膝蹲-起立動作進行分析。經過測試,我們共取得1586組有效數據,頻率為200Hz,此次測試共耗時7.93s。我們利用多波峰(波谷)最小二乘法對測試曲線進行擬合,最后選取Boltzmann函數進行擬合,得到擬合曲線,如圖2所示。
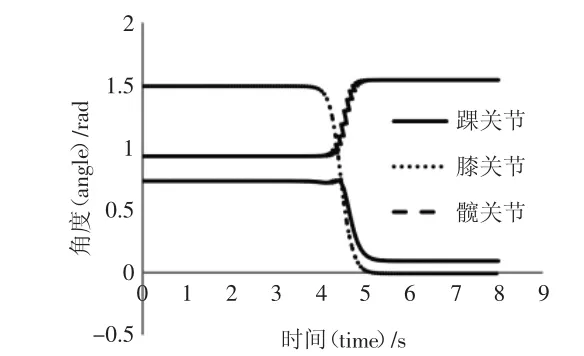
圖2 雙膝蹲特征角曲線擬合Fig.2 Squatting Knees Characteristic Angle Curve Fitting
3.2 動力學模型中各關節動力學分析
人體雙膝蹲-起立過程中人體各個關節處運動趨勢、受力狀態以及角位移變化都不同,因此需要把人體分成幾個部分來進行計算。根據人體運動的具體過程,我們以髖關節、膝關節以及踝關節將人體分成三部分進行分別計算。整個過程是個運動的過程,需要用到動力學中牛頓力學體系的知識來計算。根據剛體平面運動微分方程。

分別取軀干OC、大腿OA、小腿AB為研究對象,對髖關節、膝關節及踝關節處轉矩進行分析計算。
3.2.1 髖關節處轉矩分析
先研究髖關節處力矩變化,我們把軀干OC拿出來進行單獨研究。設背架與負重的質量為m1,其質心加速度為aC1,a為質心的橫坐標。軀干的受力分析圖,如圖3所示。

圖3 軀干受力分析Fig.3 Trunk Stress Analysis
圖中:FOx、FOy—大腿給髖關節處的支反力在水平方向與豎直方向的分解;G1—背架與負重所受重力,為了簡化計算,我們把背架與負重的質心設在OC中點處;M1—軀干完成起立動作時所需力矩,也就是我們需要求得的未知量。
能源互聯網統籌了智能電網、微電網、泛能網等概念,但智能電網是能源互聯網的基礎和核心,是能源轉化和配置的重要平臺。能源互聯網的架構如圖2所示。
根據剛體平面運動微分方程(1)和方程(2),可列得下列方程:

從式(3)~式(5)中可以看出 M1為 θ1、θ2、θ3的函數,而 θ1、θ2、θ3又是時間t的函數,則可以知道M1是關于時間t的函數。
3.2.2膝關節處轉矩分析
再對外骨骼大腿進行受力分析,如圖4所示。圖中:m2—大腿的質量;aC2—其質心處加速度;b—質心橫坐標。

圖4大腿受力分析Fig.4 Stress Analysis of the Thigh
圖4 中:F′Ox、F′Oy—軀干對髖關節的支反力在水平和豎直方向上的分量;FAx、FAy—小腿對膝關節的支反力在水平方向和豎直方向上的分量;G2—大腿所受重力;M2—支撐大腿完成起立動作所需力矩。則可列得下列方程:

從式(6)~式(8)中可以看出 M2為 θ1、θ2、θ3的函數,而 θ1、θ2、θ3又是時間t的函數,則可以知道M2是關于時間t的函數。
3.2.3 踝關節處轉矩分析
最后對外骨骼小腿進行受力分析,其中m3為小腿的質量,其質心橫坐標為c,質心加速度為aC3,受力分析,如圖5所示。

圖5 小腿受力分析Fig.5 Calf Stress Analysis

從式(9)~式(11)中可以看出 M3為 θ1、θ2、θ3的函數,而 θ1、θ2、θ3又是時間t的函數,可以知道M3是關于時間t的函數。
4 仿真結果及分析
4.1 仿真結果
由以上的分析我們知道,轉矩M為時間t的函數,由以上所有的的式子可以聯立解出三個力矩隨時間的函數,為了能夠清晰看出力矩隨時間的關系,我們在MATLAB軟件中進行求解。
我們的研究對象為西南交通大學第二代外骨骼試驗樣機,其額定負載為60kg,為了研究雙膝蹲-起立動作中各關節轉矩變化以及轉矩隨負重不同產生的變化,我們分別采取無負重,負重20kg、40kg及60kg四種不同的工況進行仿真分析。在這四種不同的工況中,人體的運動過程不發生變化,人體運動的時間都相同。與圖2中人體特征動作運動的仿真一致,時間t的取值為0s到8s,將式(3)~式(5)、式(6)~式(8)和式(9)~式(11)分別編程計算,我們得到了轉矩M關于時間t的函數圖像,如圖6~圖8所示。

圖6 髖關節處轉矩變化Fig.6 Torque Variation at the Hip
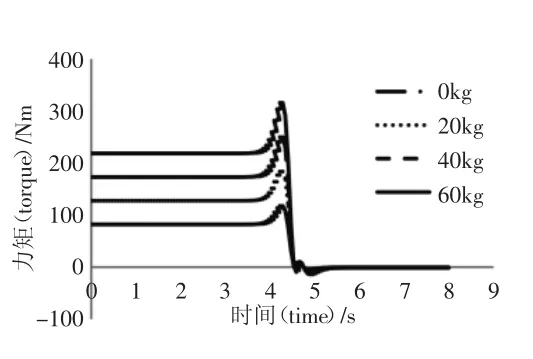
圖7 膝關節處轉矩變化Fig.7 The Knee Joint Torque Variation

圖8 踝關節處轉矩變化Fig.8 Ankle Torque Variation
4.2 仿真結果分析
我們將各關節四種工況下轉矩峰值列,如表1所示。

表1 各關節不同負重下轉矩峰值Tab.1 Each Joint Peak Torque Under Different Load
從表1中直觀的可以看出各關節隨負重不同的轉矩峰值。通過對比可以發現,同負重下膝關節的轉矩最大,每個關節的轉矩基本隨負重的增加而線性變化。
5 結論
(1)選取了人體特征動作中的雙膝蹲-起立動作為研究對象,采取不同負重,通過對第二代外骨骼試驗樣機進行研究,利用理論力學中動力學的知識,根據人體特征動作的運動特性,建立了雙膝蹲-起立特征動作的動力學模型。
(2)通過運用MATLAB軟件進行了編程仿真,分析得到了各個關節處轉矩M隨時間t的變化規律。各關節轉矩峰值出現在4.3s處,且轉矩隨負重增加基本呈線性變化。我們可以看到膝關節處的轉矩最大,在液壓缸設計時需最先考慮膝關節處轉矩條件。
(3)從仿真所得到的函數圖像中可以看出,實驗中人體從下蹲姿態到完全起立耗時大約1.5s左右,各個關節所需轉矩的變化速度較快,為了達到外骨骼與人體人機高度偕行的要求,需要外骨骼動力部分在設計時,所提供的轉矩變化響應要迅速,不然可能會對人體的關節處產生沖擊。
猜你喜歡
動漫界·幼教365(大班)(2021年4期)2021-05-23 21:33:16
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文周刊·小學一年級版(2016年28期)2017-06-03 00:28:49
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
山東工業技術(2016年15期)2016-12-01 05:31:22
少兒科學周刊·少年版(2015年4期)2015-07-07 20:56:37
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44