汽車翻滾模擬臺架設計與分析
2018-08-28 09:12:38蔣成約胡曉燕
機械設計與制造 2018年8期
蔣成約,胡曉燕,陳 坤,張 偉
1 引言
汽車翻滾事故在所有道路事故中所占的比率相對較小,但翻滾事故所造成的死亡率卻相當高[1]。國外對于車輛翻滾的研究較早,目前,汽車翻滾測試已經作為一項安全標準加入到美國高速公路管理局和IIHS(美國公路安全保險協會)汽車安全測試項目中,現在全球能實現重復翻滾的翻滾碰撞試驗,只有控制翻滾碰撞系統(CRIS)、喬丹翻滾系統(JRS)[2]和動態翻滾試驗系統[3]。國內相關的研究起步較晚,仍處于初期探索和研究的階段,相應的文獻資料較為缺乏,同時,車輛翻滾還未納入行業標準及法規。目前,國內有部分單位在開展車輛翻滾相關的實驗和研究,但主要集中在計算機仿真上[3],而實際的翻滾臺架試驗卻很少。因此,設計一款滿足實驗要求并模擬試驗數據的汽車翻滾模擬臺架對開展相關的翻滾研究具有重要的意義和價值。基于此,設計了一種擬合汽車翻滾時橫向速度和角速度數據的汽車翻滾模擬臺架,以供模擬基本的乘員姿態與評價乘員傷害等研究。
2 翻滾臺架設計
設計過程按照FMVSS208法規要求,遵循理論計算、建立模型、方案對比與改進、仿真分析、數據對比、結果分析的設計思路。
2.1 模型建立與方案對比
模型建立采用UG8.0軟件,設計了兩種驅動方式的方案:電動式汽車翻滾臺架,液壓式汽車翻滾臺架。通過比較,電動式汽車翻滾臺架,占地面積小,結構簡單,控制方便,可通過控制電機的轉速來控制汽車翻轉的橫向角速度和線速度,可以更好地模擬試驗數據。其中電動式汽車翻滾臺架有3種方案:齒輪傳動式固定臺架,平鋪式滾動臺架,懸置式滾動臺架。相比齒輪傳動式,懸置式滾動臺架結構簡單,且與平鋪式滾動臺架相比,懸置式將軌道懸置,節省了空間,故最終采用電機驅動的懸置式滾動臺架設計。
2.2 機構原理
如圖1所示,車身固定架上有螺紋孔,通過螺栓螺母固定車身,固定架與滑輪架通過軸承配合;滑輪架上的滑輪與懸置軌道配合,帶動車身進行橫向平動;鋼繩為封閉形式,與滑輪架固連,與電機軸纏繞,電機軸的轉動卷動鋼繩,帶動滑輪架和車身的橫向運動。同時,另一個電機控制車身固定架的轉動,使其在平動的同時,產生轉動。

圖1 翻滾臺架原理示意圖Fig.1 Structure of Roller Platform
2.3 理論計算
對臺架進行進一步的理論計算。根據FMVSS208規定,試驗過程中,汽車應在側向速度v=48km/h的情況下進行動態翻滾。簡化翻滾主體(車身與車身固定架)為長方體,由以下已知條件開展計算:
已知:白車身360kg,乘員60kg,即總質量為m=420kg;實驗白車身寬為a=1.44m,高為b=1.75m,質心與旋轉軸軸心距離為d=0.2m,翻轉最大角速度為w=8.5rad/s。
2.3 .1電機一的計算
電機一的選型選取最大翻滾角速度時刻進行計算。
則轉動主體的轉動慣量為:

最大轉動力矩為:T=Jw=1822.4N/m


則電機一的功率為15.5kW,最大轉速為81.21r/min。
2.3.2 電機二的計算
電機二作為橫向平動的動力裝置,模擬汽車翻滾的線速度。計算時,將車身、車身固定架及電機作為整體。
假設電機二的電機軸為R=0.2m,滑輪與導軌之間的滾動摩擦系數為u=0.05,啟動或制動時,最大加速度為a=10m/s2,同理,采用與電機一的計算方法,則有:拉力為F=7185.65N,力矩為Tf=1437.13N·m,轉速為n2=637.78r/min,功率為P2=95.826kW。
2.3.3 導軌的強度校核
導軌的總長為9m,每3m為一個固定點。導軌的橫截面為U型,長500mm,高400mm,槽寬260mm,槽高230mm。導軌選用的材料為 45 號鋼,彈性模量 E=210GPa,許可撓度[v]=L/600[4],取三分之一長的導軌進行受力分析及校核。利用慣性矩公式和簡支梁撓曲公式可得到最大撓度 υmax=3.177×10-5,即 υmax<[υ],所以設計的導軌滿足要求。
2.4 電機控制單元
利用PLC運動控制進行翻滾模擬臺架的控制,通過控制輸入電壓信號的不同,控制電機轉速。控制單元分為兩個模塊:按鍵控制模塊,電機驅動模塊。按鍵控制模塊主要包括啟停鍵,方向控制鍵,緊急停止鍵;電機驅動模塊主要接收來自PLC的電壓信號并控制電機的速度按預定曲線進行變化。總體控制流程,如圖2所示。
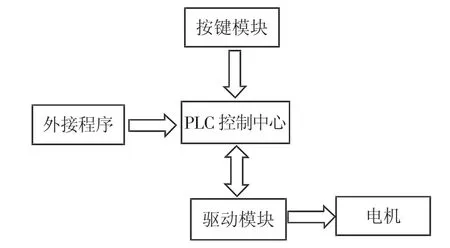
圖2 電機控制流程Fig.2 Control Diagram of Motor
外接程序由用戶自定義編程完成,主要是將模擬翻滾試驗數據的電壓控制程序輸入控制系統中。外接程序通過可編程控制器實現控制目的。PLC控制中心接收到按鍵模塊信號后,其中的可編程控制器以周期掃描方式運行自定義程序,同時,PLC將控制信號傳送給驅動模塊驅動電機按預定運動曲線進行轉動。
3 Simulink仿真分析
3.1 數學建模
數學建模為主要分為三塊:運動軌跡,機械結構和電機,由于Simulink當中有相應的電機仿真模塊,其建模過程不作累述。
3.1.1 運動軌跡數學模型
翻滾臺架按特定的軌跡進行運動,可將運動軌跡分為多段曲線進行建模,建模過程要保證每段曲線的光滑連接及速度的平順性。不失一般性,選擇一個五次多項式描述軌跡曲線,即:

其速度和加速度方程為:

軌跡函數的約束條件為:

式中:n0、n0、n0表示 t=0 時的角度,角速度,角加速度ffft=tf時的角度,角速度,角加速度;a0~a5—系數。求解則得到系數的值,整理成矩陣為:
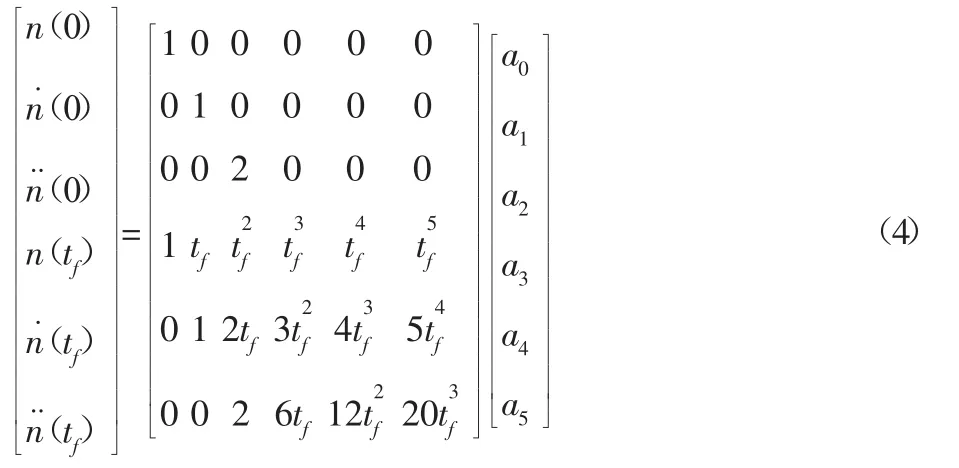
根據以上數學模型,給定角度、角速度、角加速度等數據,即可求解相應的運動軌跡方程。
3.1.2機械結構數學模型
機械結構模型的建立利用拉格朗日法進行求解。拉格朗日運動方程為:

式中:L=T-U,T—動能;U—勢能;D—損失能量;qi—空間坐標。
機構上存在兩個坐標,固定坐標(0)和繞固定坐標原點旋轉的移動坐標(1),固定坐標(0Z和移動坐標1Z重合。)假設取移動坐標系重心點(r1,0,0),則進行坐標變換:

式中:r1—重心到移動坐標的原點的距離;θ1—旋轉的角度;m1—機構的質量。
則可得到速度量:

移動坐標系相對于固定坐標系的旋轉角速度為:

機構的動能T為:

式中:Izzg1—機構的轉動慣量。
代入式(6)、式(7)得到:

勢能U為:

考慮到粘性摩擦,可得到:

式中:c1—黏性系數。
則根據拉格朗日運動方程(5)得到機構運動的數學模型:

3.2 搭建Simulink模塊
仿真主要利用MATLAB的Simulink模塊,目的是模擬試驗數據,驗證翻滾臺架控制的可行性和科學性。仿真分為電機一的角速度與電機二的線速度的仿真。針對電機一角速度的仿真步驟如下:
分別建立信號輸入模塊,PID控制模塊,電機模塊和機械模塊(即定義車身的轉動慣量、質量等)。整體仿真模型,如圖3所示。
取原始試驗數據[5]中角速度曲線的主要點繪制簡化曲線。
將曲線分段處理,分為[0,0.25],(0.25,0.5],(0.5,0.63],(0.63,1.13],(1.13,1.31],(1.31,1.83],(1.83,2.03],(2.03,2.12],(2.12,2.74],(2.74,3.5]十個區間,為與線速度時刻對齊,整體增加 0.5s,即[0.5,0.75],(0.75,1]…(3.24,4],用 5 次多項式描述各個區間的軌跡曲線。
同理,改變輸入信號,即可對電機二的線速度進行仿真,仿真結果,如圖4(a)、圖4(b)所示。其中藍色曲線為輸入曲線,紅色曲線為經過PID控制后的輸出曲線。將仿真曲線與試驗數據進行對比,得到圖5(a)、圖5(b)。其中藍色曲線為試驗曲線,紅色曲線為仿真曲線。
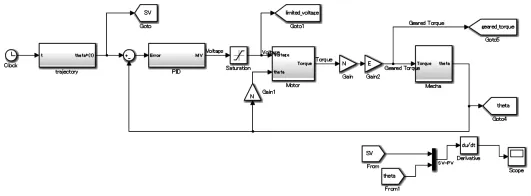
圖3 Simulink仿真模型Fig.3 Simulink Model
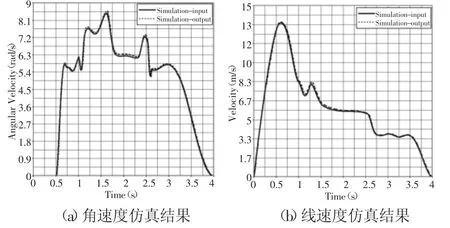
圖4 仿真結果Fig.4 Simulation Result
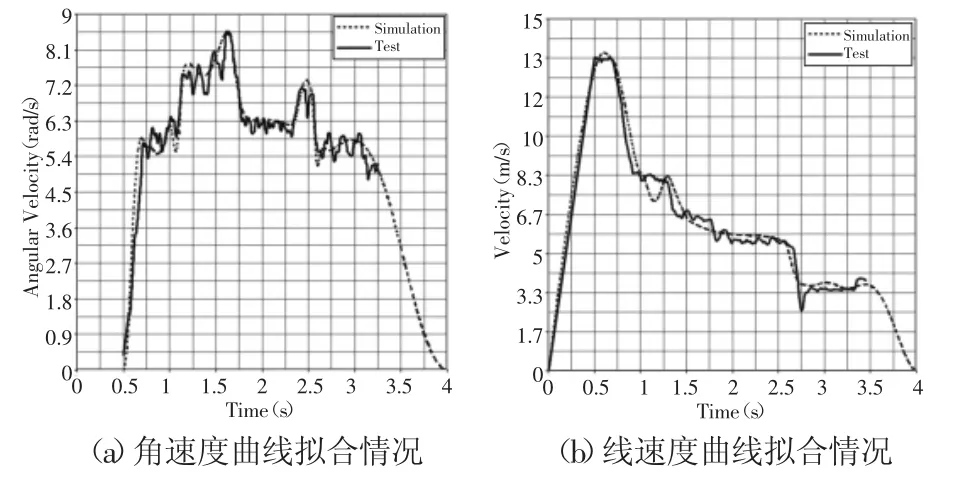
圖5 與試驗數據擬合情況Fig.5 Correlation of Velocities
由仿真結果和曲線擬合情況可知,電機仿真輸出曲線與輸入曲線基本擬合,由于電機自身反應速率的問題,導致輸出曲線稍稍滯后于輸入曲線;仿真曲線經過了試驗曲線上主要的點,基本上模擬了試驗曲線主要的時間節點和速度。綜上所述,仿真結果貼合試驗數據,符合試驗要求。設計合理可行。
4 結論
設計過程應用材料力學、機械設計等知識進行可靠的計算和分析,采用Simulink仿真進行了機構合理性的驗證和分析,并給出了電機的控制策略。計算結果顯示翻滾模擬臺架結構強度滿足要求;仿真結果曲線基本模擬了試驗曲線;之后,將進一步完善設計并根據設計進行樣機試制及實物的制作和試驗,供后期乘員傷害及姿態響應等研究。
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
汽車與安全(2019年9期)2019-11-22 09:48:03
藝術啟蒙(2018年7期)2018-08-23 09:14:18
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50
舒適廣告(2008年9期)2008-09-22 10:02:48