基于激光雷達(dá)感知的場(chǎng)景重構(gòu)方法研究
2018-08-28 11:45:18邢雨劉亞彬韓康劉宇劇學(xué)銘
汽車(chē)技術(shù) 2018年8期
邢雨 劉亞彬 韓康 劉宇 劇學(xué)銘
(北京歐百拓信息科技發(fā)展有限公司,北京 100102)
主題詞:激光雷達(dá) 環(huán)境感知 場(chǎng)景重構(gòu) 測(cè)評(píng)系統(tǒng) 自動(dòng)標(biāo)注
1 前言
隨著自動(dòng)駕駛技術(shù)的發(fā)展,越來(lái)越多種類的環(huán)境感知模塊得到應(yīng)用,其涉及到的傳感器包括激光雷達(dá)、毫米波雷達(dá)、單目或雙目相機(jī)等[1]。準(zhǔn)確地感知周邊環(huán)境是環(huán)境感知模塊的首要任務(wù)[2-3]。要進(jìn)一步提升其相關(guān)性能,則必須先對(duì)周邊環(huán)境進(jìn)行精確重構(gòu)。在現(xiàn)有環(huán)境感知模塊中,激光雷達(dá)環(huán)境感知模塊具有良好的綜合性能,但在國(guó)內(nèi)使用的過(guò)程中暴露出了諸如分類錯(cuò)誤較多、目標(biāo)跟蹤時(shí)間短等問(wèn)題。針對(duì)類似問(wèn)題,林學(xué)秋通過(guò)機(jī)載二維激光雷達(dá)對(duì)三維場(chǎng)景重構(gòu)方法進(jìn)行了研究[4],趙明波通過(guò)多角度激光雷達(dá)數(shù)據(jù)融合來(lái)實(shí)現(xiàn)遮蔽目標(biāo)的檢測(cè)[5],閆利等人對(duì)激光雷達(dá)與全景影像的融合方法進(jìn)行了研究[6],段建民等人通過(guò)激光雷達(dá)數(shù)據(jù)對(duì)地面狀況信息的獲取方法進(jìn)行了研究[7],鄒斌等人通過(guò)車(chē)載三維激光雷達(dá)對(duì)道路的可通行區(qū)域提取算法進(jìn)行了研究[8]。這些研究大多集中在部分要素重構(gòu)算法優(yōu)化,或與其他類型傳感器的數(shù)據(jù)融合方面,對(duì)于如何通過(guò)融合多種算法來(lái)提升激光雷達(dá)自身場(chǎng)景重構(gòu)精度的研究較少,為此,本文提出了一套新的場(chǎng)景重構(gòu)方法,通過(guò)融合多種算法對(duì)數(shù)據(jù)進(jìn)行逐步處理,同時(shí)對(duì)目標(biāo)分類進(jìn)行跟蹤和回溯,從而提升環(huán)境重構(gòu)精度。
2 硬件平臺(tái)搭建
全面且精確的信息收集是進(jìn)行精確場(chǎng)景重構(gòu)的重要前提,為此,首先進(jìn)行硬件平臺(tái)的搭建。在現(xiàn)有的各類傳感器中,激光雷達(dá)在測(cè)量精度與測(cè)量距離等方面的綜合性能較好,且技術(shù)較為成熟,因此選擇以激光雷達(dá)為主要傳感器,進(jìn)行硬件平臺(tái)搭建,設(shè)備實(shí)際安裝部署如圖1所示。
通過(guò)在車(chē)輛四周布置6個(gè)4線激光雷達(dá)傳感器實(shí)現(xiàn)對(duì)車(chē)身周邊環(huán)境信息的全面收集;同時(shí),通過(guò)2臺(tái)SICK LMS511激光雷達(dá)實(shí)現(xiàn)對(duì)地面信息的精確收集。此外,為收集車(chē)輛姿態(tài)及位置信息,在系統(tǒng)中加裝了GPS設(shè)備與慣性測(cè)量單元(Inertial Measurement Unit,IMU),如圖2所示。
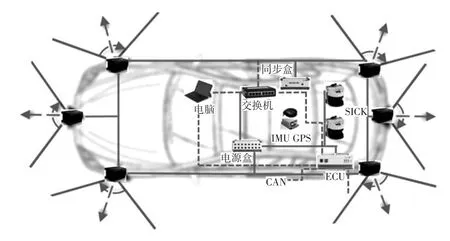
圖1 設(shè)備安裝部署示意
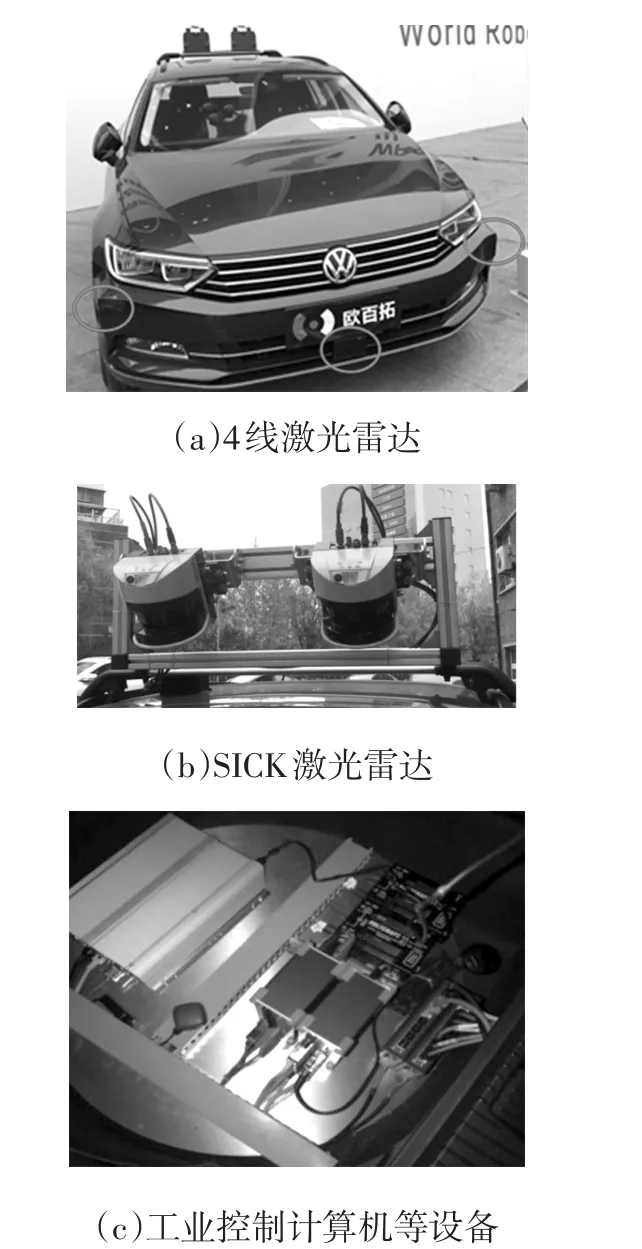
圖2 硬件平臺(tái)實(shí)物
3 數(shù)據(jù)處理流程
對(duì)場(chǎng)景進(jìn)行重構(gòu)的核心環(huán)節(jié)是對(duì)關(guān)鍵環(huán)境要素進(jìn)行重建。通過(guò)追加后處理算法,對(duì)激光雷達(dá)環(huán)境感知模塊收集到的周邊環(huán)境點(diǎn)云進(jìn)行處理與驗(yàn)證,最終通過(guò)比對(duì)分析對(duì)結(jié)果進(jìn)行完善,具體處理過(guò)程為:
a.點(diǎn)云類別判定。采集系統(tǒng)中融合了多種傳感器,因此需要對(duì)不同傳感器收集到的數(shù)據(jù)進(jìn)行判定,根據(jù)點(diǎn)云所屬設(shè)備特性進(jìn)行相應(yīng)的后處理。例如,不同的激光雷達(dá)會(huì)對(duì)不同高度的目標(biāo)進(jìn)行掃描和感知,它們分別負(fù)責(zé)掃描對(duì)應(yīng)的高度層,這些高度信息對(duì)于之后的篩選和聚類具有非常重要的意義。同時(shí),點(diǎn)云不具有速度信息,所以若想要判別對(duì)應(yīng)目標(biāo)的運(yùn)動(dòng)屬性,需要對(duì)比不同幀中同一目標(biāo)對(duì)應(yīng)點(diǎn)云的位置。
b.點(diǎn)云篩選。在實(shí)際使用過(guò)程中,并非所有點(diǎn)都會(huì)參與到后續(xù)的處理過(guò)程中,因此應(yīng)首先根據(jù)范圍和相應(yīng)的條件,剔除不符合需求的點(diǎn),獲取較為純凈的點(diǎn)云。例如,因系統(tǒng)中融合了SICK雷達(dá),因此在對(duì)地面要素進(jìn)行提取的過(guò)程中,將重點(diǎn)采用此設(shè)備所收集到的點(diǎn)云數(shù)據(jù),而不再需要其他激光雷達(dá)的輔助。
c.點(diǎn)云聚類。通過(guò)DBSCAN算法對(duì)環(huán)境感知模塊初步處理后的點(diǎn)云數(shù)據(jù)進(jìn)行二次聚類,重點(diǎn)處理其未聚類的點(diǎn)云,從而提高聚類精度并獲得更為詳細(xì)的物體數(shù)量與位置。例如,大型車(chē)輛點(diǎn)云處理過(guò)程中,在第1次聚類時(shí),只會(huì)將部分點(diǎn)云聚類成一個(gè)物體,會(huì)出現(xiàn)將一個(gè)物體的點(diǎn)云聚類成多個(gè)物體以及剩余點(diǎn)云的情況,針對(duì)這種情況,二次聚類時(shí)進(jìn)行碰撞檢測(cè)并聚類,最終將相關(guān)點(diǎn)云聚類成一個(gè)物體,從而提升聚類精度。但在聚類過(guò)程中,由于遠(yuǎn)、近位置的點(diǎn)云數(shù)量不同,所以在使用DBSCAN的過(guò)程中會(huì)根據(jù)與本車(chē)的距離修改算法中的最小點(diǎn)數(shù),以此提高DBSCAN算法在對(duì)不同距離點(diǎn)云處理的適用性,此外,考慮到在車(chē)輛行駛方向上漏識(shí)物體會(huì)帶來(lái)極大的安全隱患,因此車(chē)輛行駛方向點(diǎn)云聚類過(guò)程中會(huì)降低算法中允許的最小點(diǎn)數(shù),從而提高聚類精度,盡管這樣可能出現(xiàn)多識(shí)別的情況,但可以根據(jù)碰撞檢測(cè)及二次聚類等方法進(jìn)行修正。
d.目標(biāo)物跟蹤。指對(duì)不同數(shù)據(jù)幀之間的物體進(jìn)行跟蹤,因此在完成物體聚類的基礎(chǔ)上,首先利用匈牙利算法對(duì)前、后幀中的物體進(jìn)行匹配。但系統(tǒng)和設(shè)備存在不可避免的誤差,所以匹配后通過(guò)卡爾曼濾波算法來(lái)對(duì)結(jié)果進(jìn)行輔助修正,以提升跟蹤精度,從而實(shí)現(xiàn)對(duì)各目標(biāo)物的跟蹤,跟蹤過(guò)程中,根據(jù)不同目標(biāo)物的運(yùn)動(dòng)特性等信息確定物體類別,并對(duì)存在錯(cuò)誤分類的物體類別進(jìn)行修正,從而得出最終結(jié)果。需要說(shuō)明的是,由于在卡爾曼算法中使用到的系統(tǒng)噪聲屬于先驗(yàn)性參數(shù),因此需要根據(jù)試驗(yàn)經(jīng)驗(yàn)確定。
e.道路邊線提取。在動(dòng)態(tài)目標(biāo)物提取完成后,對(duì)道路邊線進(jìn)行提取,通過(guò)點(diǎn)云網(wǎng)格化與區(qū)域增長(zhǎng)相結(jié)合的方法進(jìn)行聚類,之后通過(guò)各格網(wǎng)的高差特性獲取邊線點(diǎn)集,最后采用最佳數(shù)學(xué)模型并通過(guò)最小二乘法進(jìn)行道路邊線擬合,得出最終結(jié)果。
4 系統(tǒng)平臺(tái)及算法驗(yàn)證
4.1 系統(tǒng)平臺(tái)測(cè)試
采用場(chǎng)景重構(gòu)的方式對(duì)硬件平臺(tái)的可靠性進(jìn)行驗(yàn)證:首先,選取場(chǎng)景較為簡(jiǎn)單的高速公路路段數(shù)據(jù)進(jìn)行重構(gòu),此場(chǎng)景中車(chē)輛以約107 km/h的速度行駛,實(shí)際場(chǎng)景如圖3a所示,原始數(shù)據(jù)經(jīng)處理后的結(jié)果如圖3b所示,從圖3b可知,在此情況下可對(duì)前方約230 m范圍內(nèi)的車(chē)輛進(jìn)行識(shí)別;其次,選取場(chǎng)景較為復(fù)雜的城區(qū)路段數(shù)據(jù)進(jìn)行重構(gòu),實(shí)際場(chǎng)景如圖4a所示,測(cè)試車(chē)輛處于駐車(chē)狀態(tài),原始數(shù)據(jù)經(jīng)過(guò)處理后的結(jié)果如圖4b所示,從圖中可以看到,由于場(chǎng)景中存在眾多物體,所以極易造成遠(yuǎn)處物體因被遮擋而暫時(shí)丟失的情況,但是近處物體均可被精確地識(shí)別。根據(jù)兩種場(chǎng)景下的重構(gòu)結(jié)果可以看出,本硬件平臺(tái)具有良好的識(shí)別精度。
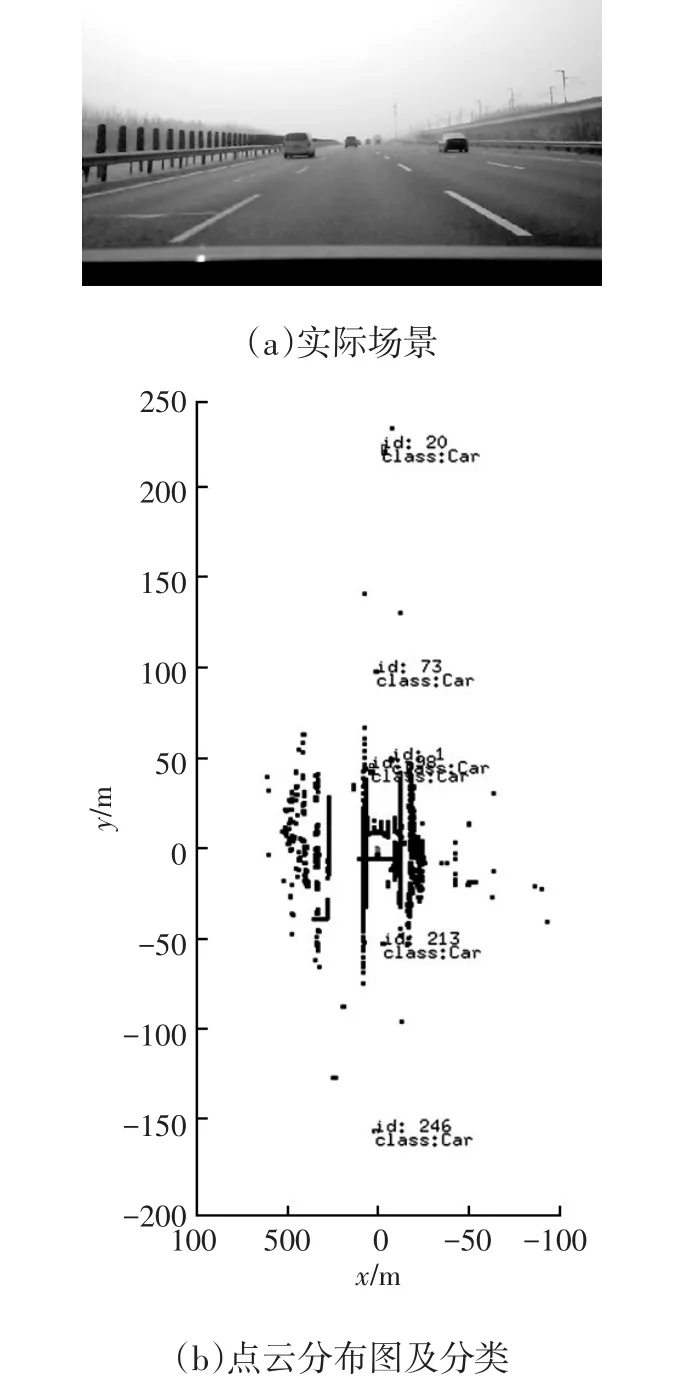
圖3 高速路段場(chǎng)景重構(gòu)
4.2 聚類算法驗(yàn)證
選取某一高速路段數(shù)據(jù)進(jìn)行測(cè)試,去除地面后的點(diǎn)云分布如圖5a所示,聚類處理結(jié)果如圖5b所示。從圖5可以看到,經(jīng)過(guò)聚類后可以找出主要目標(biāo)物,由于未對(duì)數(shù)據(jù)進(jìn)行點(diǎn)云篩選且其中包含了道路邊緣及綠化帶,所以在圖中存在較大長(zhǎng)方形物體,下一步只需要在此基礎(chǔ)上進(jìn)一步處理即可得到運(yùn)動(dòng)目標(biāo)。
4.3 跟蹤算法驗(yàn)證
以某十字路口數(shù)據(jù)為例進(jìn)行分析,聚類后的點(diǎn)云如圖6a所示,對(duì)該點(diǎn)云進(jìn)行一定幀數(shù)的跟蹤之后,效果如圖6b所示。只能跟蹤運(yùn)動(dòng)目標(biāo)物,因此靜態(tài)目標(biāo)物在圖6b中用點(diǎn)表示。由圖6可以看出,所有目標(biāo)物均被正確跟蹤。
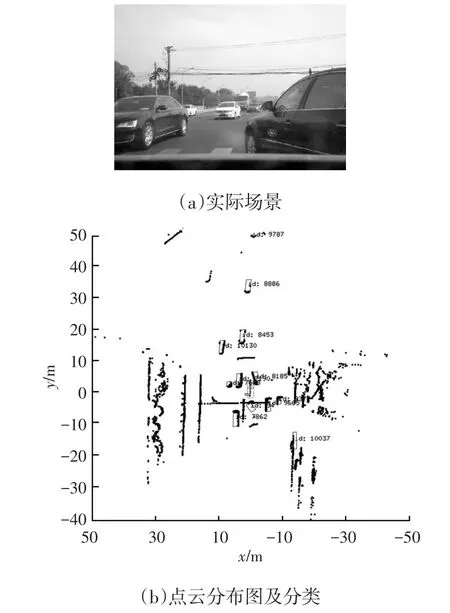
圖4 城區(qū)路段場(chǎng)景重構(gòu)
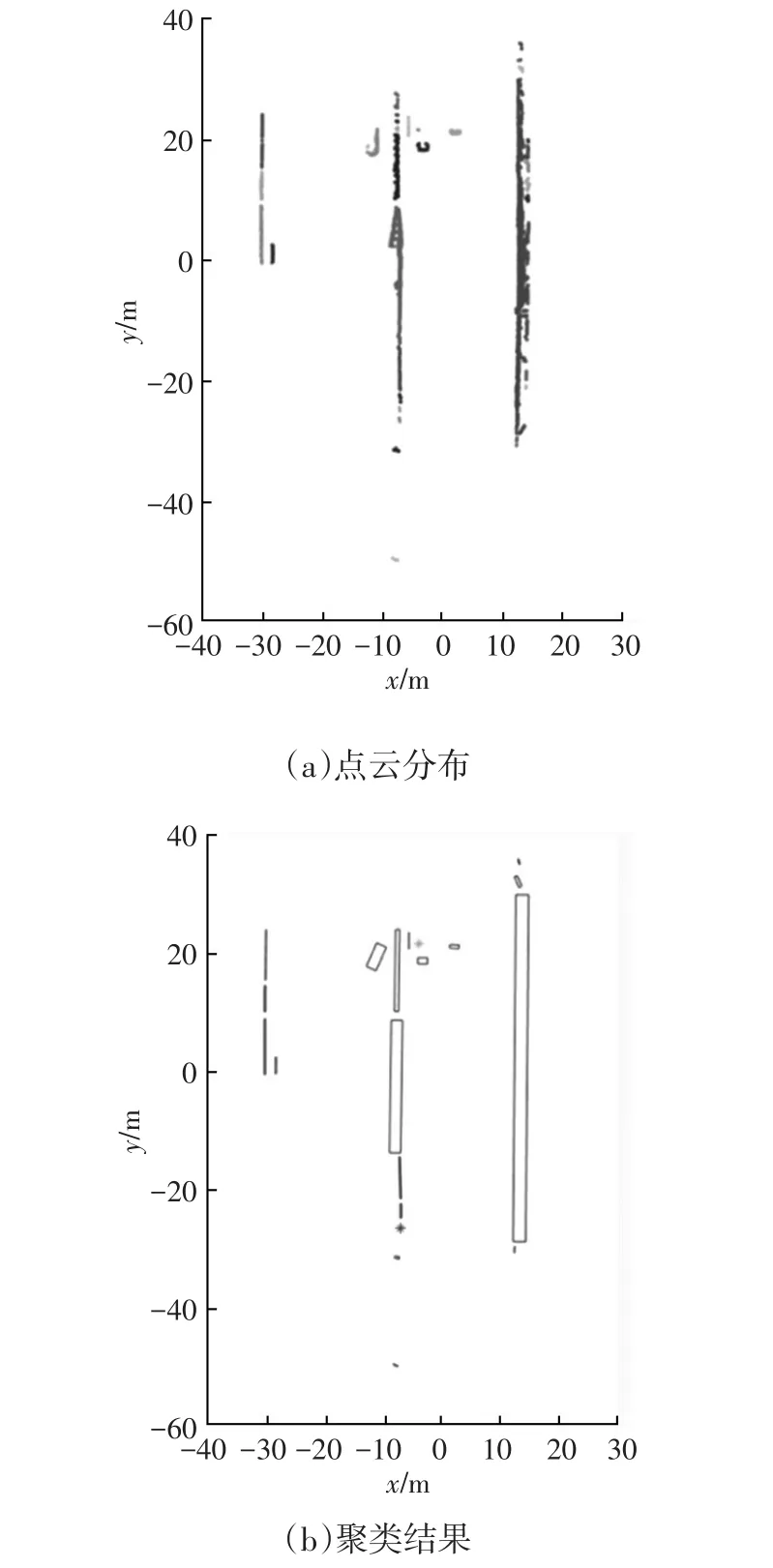
圖5 聚類算法效果
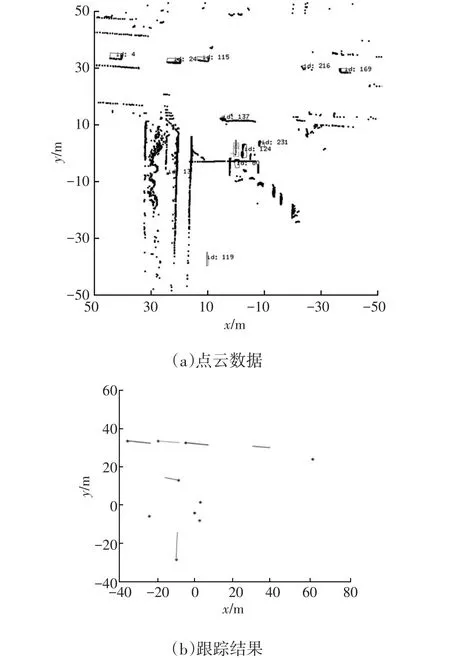
圖6 跟蹤算法效果
4.4 道路邊線提取
以某一直線路段數(shù)據(jù)為例,初始點(diǎn)云如圖7a所示。首先對(duì)點(diǎn)云網(wǎng)格化并進(jìn)行聚類處理,從而獲得包含2條邊線的點(diǎn)集,結(jié)果如圖7b所示。
然后,分別采用邊線點(diǎn)集進(jìn)行直線擬合獲取道路邊線:

式中,ρ為直線到原點(diǎn)的垂直距離;(x,y)為點(diǎn)的坐標(biāo);θ為x軸與直線垂線的角度。
最終擬合的道路邊線如圖7c所示。在道路邊線提取過(guò)程中,完成道路兩側(cè)邊線點(diǎn)的準(zhǔn)確聚類尤為關(guān)鍵。因此在聚類中,通過(guò)限定處理范圍并進(jìn)行點(diǎn)云格網(wǎng)化、格網(wǎng)區(qū)域生長(zhǎng)等處理來(lái)完成道路兩側(cè)邊線點(diǎn)的提取。
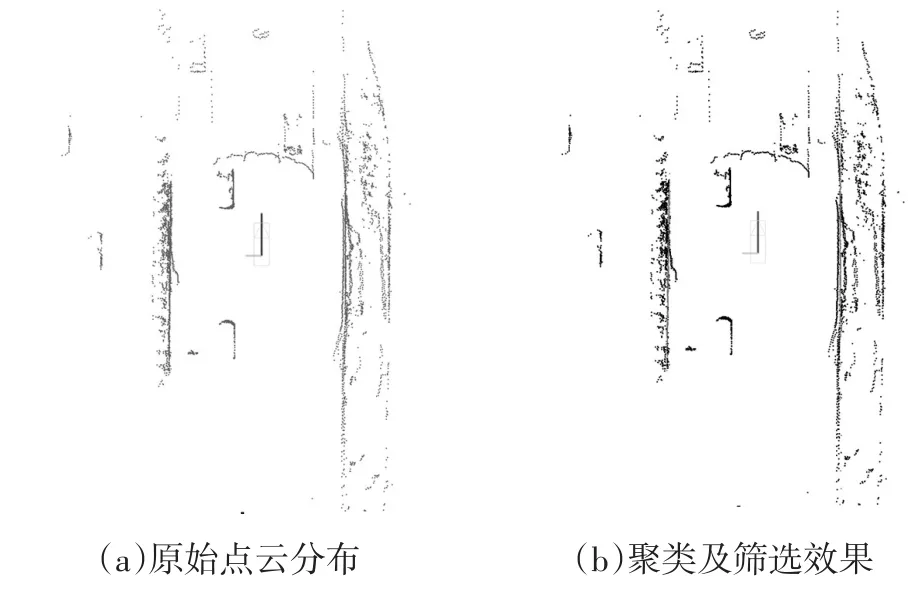
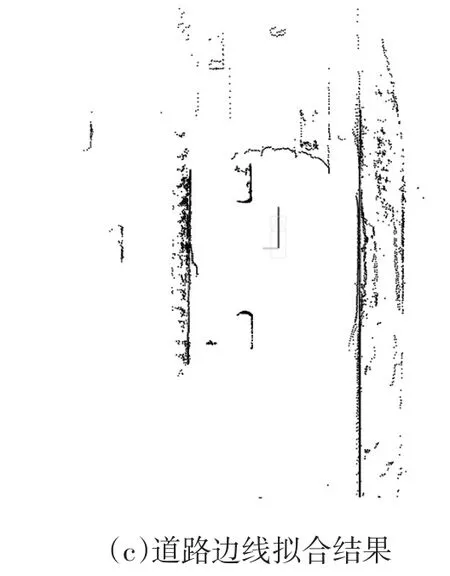
圖7 道路邊線提取過(guò)程
5 結(jié)論
本文針對(duì)激光雷達(dá)環(huán)境感知模塊識(shí)別精度不佳的問(wèn)題,提出了完整的優(yōu)化流程。此流程在已有算法的基礎(chǔ)上,通過(guò)DBSCAN算法、匈牙利算法等一系列數(shù)據(jù)處理過(guò)程,實(shí)現(xiàn)對(duì)點(diǎn)云的聚類與跟蹤,最終實(shí)現(xiàn)對(duì)目標(biāo)的分類及回溯。考慮到激光雷達(dá)無(wú)法提供物體顏色等信息,可通過(guò)融合視覺(jué)等其他傳感器模塊來(lái)進(jìn)一步豐富重構(gòu)信息。本文主要針對(duì)現(xiàn)有的激光雷達(dá)環(huán)境感知模塊的算法進(jìn)行研究與優(yōu)化,適用領(lǐng)域較窄,此問(wèn)題將會(huì)在未來(lái)的研究中予以解決。
