基于模糊控制的雙環(huán)自適應(yīng)VSC-HVDC控制策略技術(shù)研究
2018-08-24 06:09:18高金城趙巧娥王新怡曹樂萌
水電與抽水蓄能 2018年4期
關(guān)鍵詞:系統(tǒng)設(shè)計(jì)
高金城,趙巧娥,王新怡,曹樂萌
(1.中國電纜工程有限公司,北京市 100079;2.山西大學(xué)電力工程系,山西省太原市 030013;3.河北工程大學(xué)機(jī)械與裝備工程學(xué)院,河北省邯鄲市 056000)
0 引言
基于電壓源換流器的高壓直流輸電(VSC-HVDC)采用IGBT等先進(jìn)半導(dǎo)體自換相技術(shù)取代了傳統(tǒng)的基于晶閘管的線路換相換流器高壓直流輸電(LCC-VSC)[1-4]。VSC-HVDC的優(yōu)點(diǎn)在于不僅避免了LCC的換相失敗問題,而且能夠?qū)崿F(xiàn)功率的雙向流動(dòng),有功、無功獨(dú)立解耦控制。所以在遠(yuǎn)距離分布式能源發(fā)電及并網(wǎng)有很大的發(fā)展優(yōu)勢。在現(xiàn)有的VSC-HVDC控制系統(tǒng)中,采用的多是經(jīng)典的雙閉環(huán)PI控制,盡管PI控制的結(jié)構(gòu)簡單,適應(yīng)性強(qiáng),在很多領(lǐng)域都有很多應(yīng)用,但是對于一個(gè)多變量、非線性、強(qiáng)耦合的VSC-HVDC系統(tǒng)來說,傳統(tǒng)PI控制就暴露出了參數(shù)固定,不能很好滿足動(dòng)態(tài)性能的問題。有文獻(xiàn)采用非線性單純形算法結(jié)合逆系統(tǒng)的基礎(chǔ)上對PI參數(shù)進(jìn)行了離線整定[5]。還有文獻(xiàn)采用模糊免疫反饋控制用于VSC-HVDC的內(nèi)環(huán)電流環(huán)控制器的設(shè)計(jì)[6]。此外還有文獻(xiàn)采用模糊神經(jīng)網(wǎng)絡(luò)控制,設(shè)計(jì)了VSC-HVDC外環(huán)功率控制器,但是由于過多訓(xùn)練,在線時(shí)時(shí)整定不是很強(qiáng),明顯增加耗時(shí),影響了系統(tǒng)的抗干擾性能[7]。文獻(xiàn)[8]通過模糊控制,設(shè)計(jì)了一種震蕩暫態(tài)下降的VSC-HVDC的雙側(cè)模糊阻尼控制器。文獻(xiàn)[9]通過粒子群算法設(shè)計(jì)PID網(wǎng)絡(luò)神經(jīng)控制器,代替了傳統(tǒng)的PI控制器,降低了訓(xùn)練的次數(shù),很大程度地提高了系統(tǒng)的抗干擾性能。文獻(xiàn)[10]采用模糊控制設(shè)計(jì)了在VSC-HVDC系統(tǒng)中發(fā)生各種故障時(shí)的控制策略。
本文結(jié)合文獻(xiàn)[7,8]提出的模糊單環(huán)控制的基礎(chǔ)上,設(shè)計(jì)了VSC-HVDC的雙環(huán)模糊自適應(yīng)PI控制,將模糊自適應(yīng)PI控制運(yùn)用到VSC-HVDC的內(nèi)環(huán)電流環(huán)和外環(huán)功率環(huán)中,并應(yīng)用粒子群算法優(yōu)化整定PI參數(shù),在MATLAB/Simulink平臺中,對所設(shè)計(jì)的基于改進(jìn)粒子群算法的模糊雙環(huán)自適應(yīng)控制進(jìn)行仿真驗(yàn)證,很容易看出該控制提高了系統(tǒng)的抗干擾性[11]。
1 VSC-HVDC的系統(tǒng)數(shù)學(xué)模型
圖1是一個(gè)雙端VSC-HVDC系統(tǒng),分析了換流站的控制策略。其網(wǎng)側(cè)三相交流電壓分別為Us1、Us2,三相交流電流分別為Is1、Is2,電流器的等效電阻為R1、R2,換流電抗為L1、L2,直流輸電線路上的等效電阻和等效電抗分別為Rd和Ld;直流側(cè)的電容為C1、C2,兩端換流變壓器為T1、T2(1代表左端,2代表右端)。
由于VSC-HVDC是一個(gè)對稱系統(tǒng),可以單獨(dú)分析一部分,現(xiàn)就整流側(cè)進(jìn)行Park變換轉(zhuǎn)換為dq同步旋轉(zhuǎn)坐標(biāo)下表示。圖2所示為單端結(jié)構(gòu)圖。
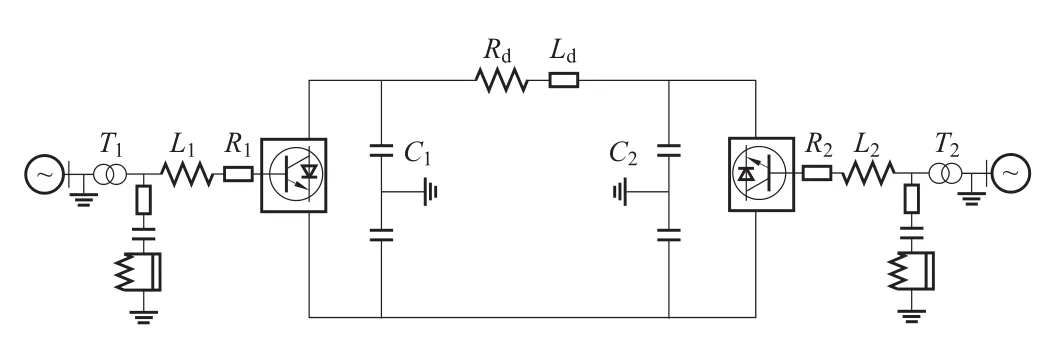
圖1 雙端VSC-HVDCFig.1 Two-terminal VSC-HVDC
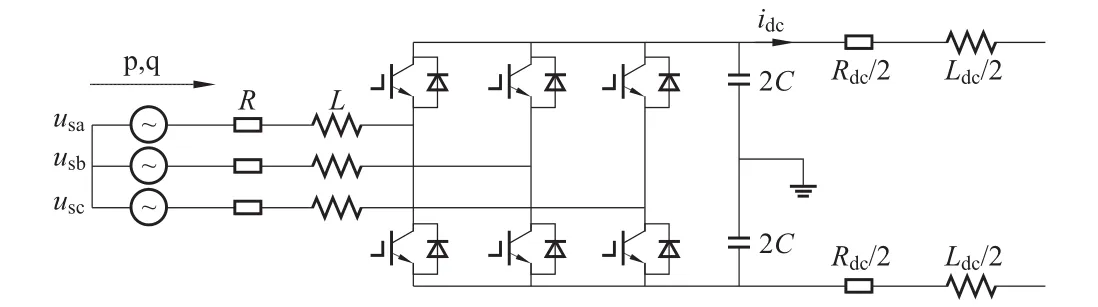
圖2 單端結(jié)構(gòu)圖Fig.2 Single-end structure diagram
可得VSC-HVDC經(jīng)過Park變換后的數(shù)學(xué)模型為:
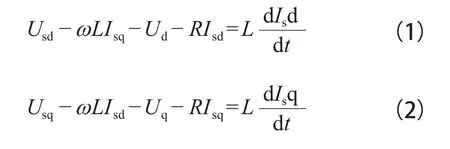
式中Usq、Usd——系統(tǒng)網(wǎng)側(cè)電壓;
Isq、Isd——系統(tǒng)網(wǎng)側(cè)電流;
Uq、Ud——換流站側(cè)的交流電壓。
2 粒子群算法
粒子群優(yōu)化(PSO)算法是一種動(dòng)物進(jìn)化計(jì)算技術(shù),它來自于對鳥群捕食行為的模擬。其中,算法的搜索空間就是問題解的全集,每個(gè)粒子代表一個(gè)可能解,每個(gè)粒子在解空間中移動(dòng)的過程就是搜尋最優(yōu)值的過程。所有的粒子都具有屬性向量=(x1,x2,…),表示當(dāng)前在解空間中位置,根據(jù)粒子當(dāng)前位置可由適應(yīng)度函數(shù)計(jì)算出粒子適應(yīng)度,以反映粒子所代表解的優(yōu)劣程度。此外,每個(gè)粒子還有一個(gè)速度向量=(v1,v2,…),用于決定其運(yùn)動(dòng)的方向和運(yùn)動(dòng)的快慢。算法首初始化為若干個(gè)隨機(jī)粒子(隨機(jī)解),然后通過迭代來尋最優(yōu)解。在每一輪的迭代中,粒子通過速度更新當(dāng)前位置,并通過適應(yīng)值函數(shù)計(jì)算出其在當(dāng)前位置下的適應(yīng)度,然后根據(jù)式(1)更新其當(dāng)前速度和當(dāng)前位置。


其中:Pbesti是粒子i的個(gè)體最優(yōu)值;c1、c2是兩個(gè)正數(shù),稱為學(xué)習(xí)因子;r1、r1是0~1之間的隨機(jī)數(shù);Gbesti是整個(gè)群體的最優(yōu)值;ω是慣性因子。ω值較大,全局尋優(yōu)能力強(qiáng),收斂較慢;反之局部尋優(yōu)能力強(qiáng),收斂較快。適應(yīng)度函數(shù)的選擇為:
其中:Δp1、Δq1、Δud2、Δq2分別為整流側(cè)和逆變側(cè)有功功率、無功功率、直流電壓和無功功率偏差值。ωi(i=1、2、3、4)為自適應(yīng)權(quán)重系數(shù),算法流程如圖3所示。
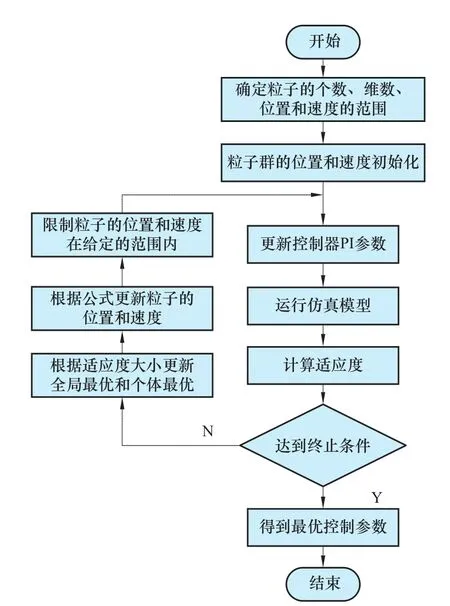
圖3 粒子群算法流程圖Fig.3 Flow chart of particle swarm optimization algorithm
3 模糊控制器設(shè)計(jì)
本文用智能模糊控制器代替?zhèn)鹘y(tǒng)的VSC-HVDC系統(tǒng)的PI控制器已成為發(fā)展趨勢。該輸入信號是給定的電壓值和實(shí)際測得的實(shí)際電壓值,產(chǎn)生的輸出信號為PI參數(shù)的修正量,用神經(jīng)網(wǎng)絡(luò)來映射輸入和輸出之間的解析關(guān)系。從而在系統(tǒng)中運(yùn)行工況改變時(shí)對電壓進(jìn)行調(diào)整,發(fā)揮系統(tǒng)的快速可調(diào)性。外環(huán)取有功無功變化量及其變化率作為輸入,經(jīng)模糊規(guī)則產(chǎn)生相應(yīng)的有功和無功電流控制量。
內(nèi)環(huán)電流環(huán)控制器設(shè)計(jì)依據(jù)式(1)可以得到:
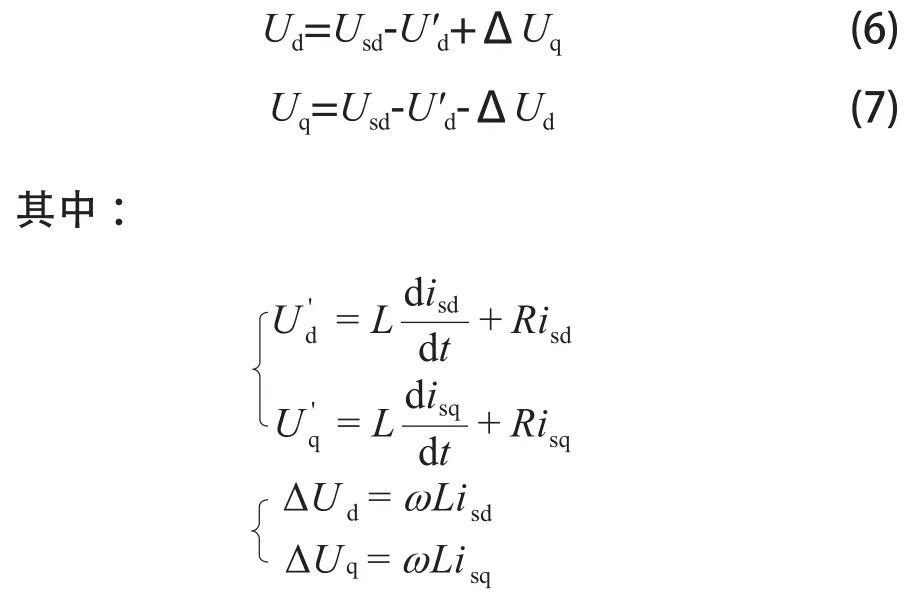
根據(jù)式(6)、式(7)可知,Ud、Uq分別與Isd、Isq存在微分關(guān)系并且具有耦合,解耦項(xiàng)是通過式(8)實(shí)現(xiàn),通過引入d、q軸電壓耦合的補(bǔ)償項(xiàng)ΔUd、ΔUq來求得對其非線性方程的的解耦,且采用交流電網(wǎng)電壓Usd、Usq進(jìn)行前饋校正控制,提高了系統(tǒng)的動(dòng)態(tài)性能,運(yùn)用改進(jìn)粒子群算法的模糊自適應(yīng)PI控制器使得系統(tǒng)具有更好的穩(wěn)定性和魯棒性。

其中:分別為有功和無功功率參考值,其大小由外環(huán)獲得;Kidp1、Kidi1、Kidp1、Kidp1分別為電流內(nèi)環(huán)dq軸控制器初始參數(shù)。綜合以上所述可得電流內(nèi)環(huán)控制器如圖4所示。
圖中控制器的Ud、Uq分別為換流器d軸、q軸分量的參考電壓,在通過反Park變換從而得到脈沖觸發(fā)信號。采用PI控制能夠快速的跟蹤電流的穩(wěn)態(tài)誤差。
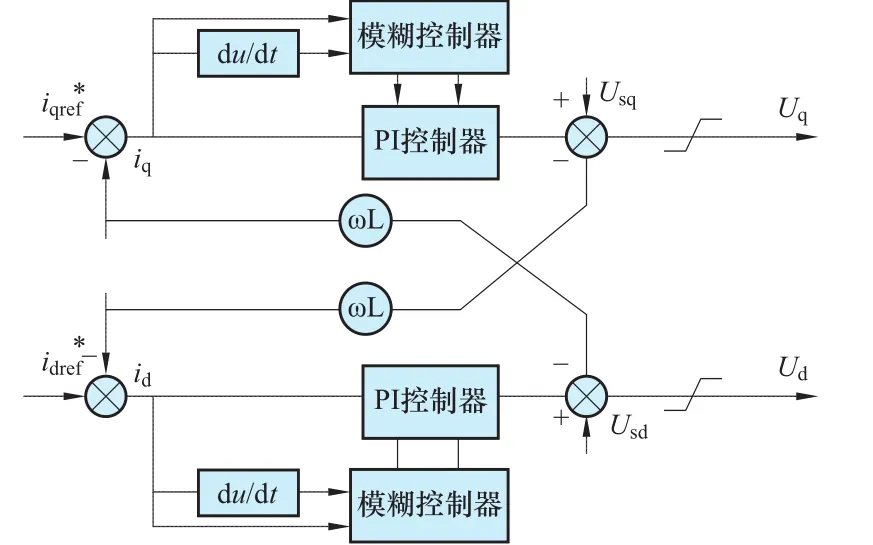
圖4 電流內(nèi)環(huán)控制器Fig.4 Inner current loop controller
外環(huán)功率數(shù)學(xué)表達(dá)式為:
取網(wǎng)側(cè)電壓矢量方向?yàn)閐軸定向時(shí),可以得到Usq=0,Usd=Us,在忽略線路電阻和換流器的損耗情況下,根據(jù)兩端功率平衡有:
根據(jù)式(9)~式(11)可知id、id和功率P、Q基本呈正比例關(guān)系,通過調(diào)節(jié)id、id則可以分別控制有功功率和無功功率,通過引入本文設(shè)計(jì)的模糊PI控制器可以有效地跟蹤系統(tǒng)的穩(wěn)態(tài)誤差并且能夠?qū)υ鰪?qiáng)外界抗干擾的能力,借以求得外環(huán)功率控制器(如圖5~圖6所示),使其追蹤功率的變化。
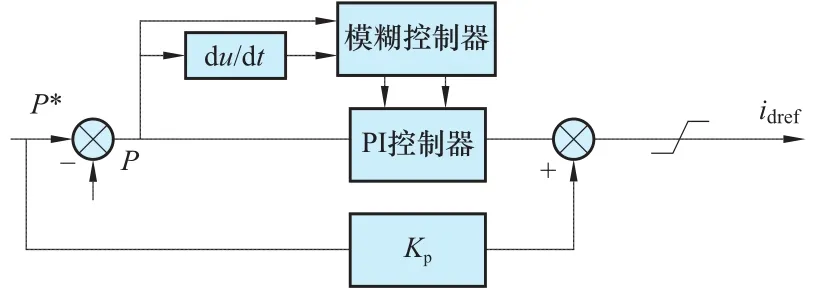
圖5 有功功率外環(huán)控制器Fig.5 Active power outer ring controller
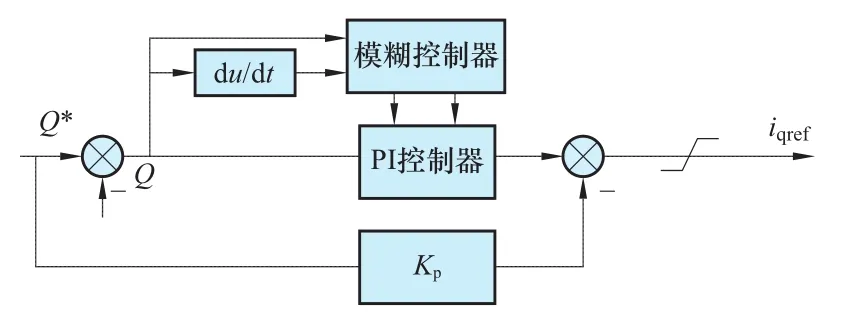
圖6 無功功率外環(huán)控制器Fig.6 Reactive power outer ring controller
4 確定輸入和輸出端論域及隸屬度
整流側(cè)外環(huán)設(shè)置了兩個(gè)功率模型的雙輸入單輸出模糊自適應(yīng)控制器,分別采用整流側(cè)有功(無功)功率偏差及其偏差變化率為輸入,將PI控制器的修正量作為輸出,內(nèi)環(huán)將電流偏差及其變化率作為輸入,將時(shí)時(shí)調(diào)整PI參數(shù)的變化量為輸出。
為了提高模糊控制的靈敏度將偏差適度放大,確定模糊自適應(yīng)控制的有功功率偏差論域?yàn)閇-12 12],有功功率偏差變化率的論域?yàn)閇-12 12],無功功率偏差的論域?yàn)閇-12 12],無功功率偏差變化率的論域?yàn)閇-12 12],電流變化率的論域?yàn)閇-12 12],PI參數(shù)變化量的論域?yàn)閇-12 12],將上述論域分割成7個(gè)部分,對應(yīng)的7個(gè)語言變量變?yōu)镹B、NM、NS、ZE、PS、PM、PB分別表示負(fù)大、負(fù)中、負(fù)小、零、正小、正中、正大。模糊規(guī)則表如表1所示。
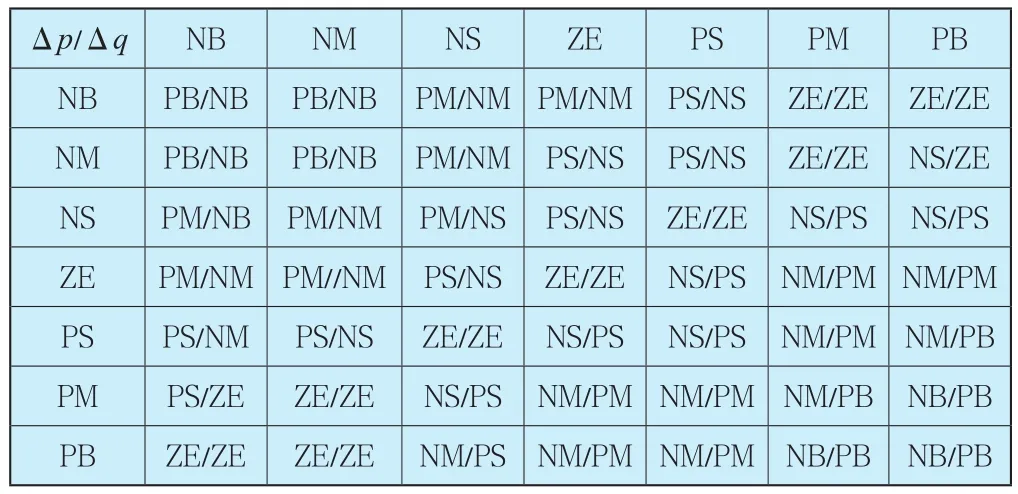
表1 模糊規(guī)則表Tab.1 Fuzzy rule table
模糊推理規(guī)則采用Mamdani推理法,去模糊化采用Centroid法。
5 逆變側(cè)控制器設(shè)置
對于連接有源網(wǎng)絡(luò)的兩端VSC-HVDC系統(tǒng)來說,可以實(shí)現(xiàn)功率的雙向傳輸,整流器和逆變器之間必須有一端采用定直流電壓,另一個(gè)采用定有功功率控制,本文中逆變側(cè)采用定直流電壓控制方式,整流側(cè)采用定有功功率方式。如果逆變側(cè)的受端連接的是無源網(wǎng)絡(luò),則逆變側(cè)通常采用定交流電壓形式。
6 仿真分析
本文在MATLAB/Simulink平臺上建立VSCHVDC系統(tǒng)模型,建立了兩端線電壓為230kV,頻率為50Hz,相電抗器R=0.08Ω,L=24mH;直流側(cè)電容C=35μF,等效電阻Rd=1.098Ω,等效電感Ld=23.56mH;額定功率為200MVA的三相正弦交流電,分別對傳統(tǒng)雙閉環(huán)PI控制和本文中設(shè)計(jì)的雙環(huán)模糊自適應(yīng)PI控制的VSC-HVDC系統(tǒng)進(jìn)行仿真,并對相應(yīng)的直流電壓,有功功率進(jìn)行比較分析。
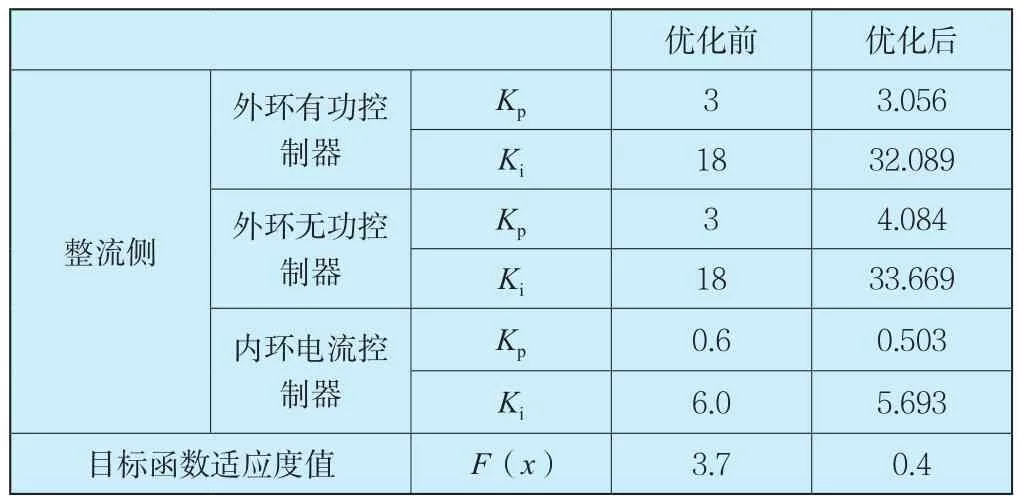
表2 整流側(cè)PSO算法目標(biāo)優(yōu)化后函數(shù)值比較Tab.2 Comparison of function values after target optimization of PSO algorithm on rectifier side
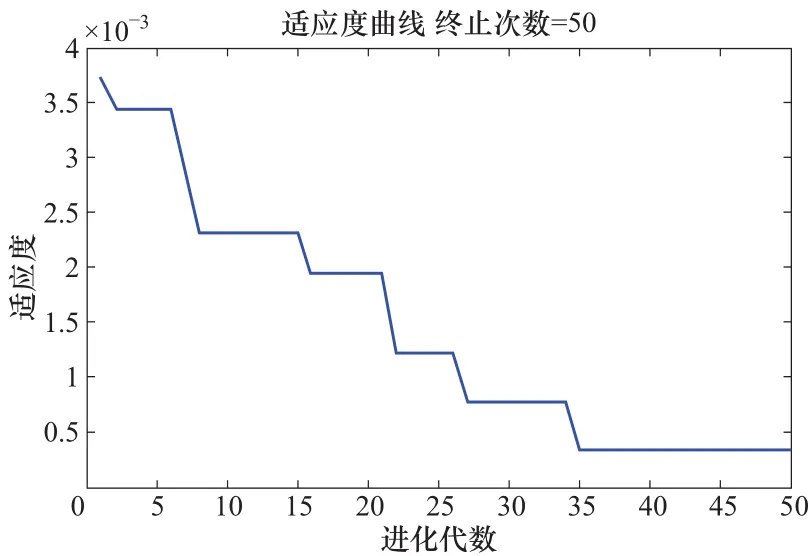
圖7 改進(jìn)粒子群算法Fig.7 Improved particle swarm optimization algorithm
6.1 穩(wěn)態(tài)實(shí)驗(yàn)
首先對VSC-HVDC系統(tǒng)中啟動(dòng)實(shí)驗(yàn)以及穩(wěn)定狀態(tài)即三相電網(wǎng)電壓平衡時(shí)進(jìn)行了仿真驗(yàn)證,其中圖8(a)表明直流側(cè)電壓能夠在0.05s內(nèi)達(dá)到穩(wěn)定值,表明啟動(dòng)時(shí)間很短;圖8(b)為系統(tǒng)無功為0時(shí)電網(wǎng)電壓和電流的相位關(guān)系;結(jié)果表明本文所設(shè)計(jì)的電流控制器有較強(qiáng)的穩(wěn)態(tài)性能。
6.2 VSC-HVDC整流側(cè)有功跌落故障分析
系統(tǒng)在進(jìn)行仿真時(shí),設(shè)定在穩(wěn)態(tài)運(yùn)行情況下1s時(shí),有功功率由1p.u.突降到0.7p.u.,觀察系統(tǒng)運(yùn)行情況,得到系統(tǒng)的整流側(cè)A相電流和直流側(cè)電壓情況,如圖9、圖10所示。其次在1.9s時(shí)刻有功功率階躍變化到0.7p.u.時(shí),Id和Iq跟隨電流的變化如圖9所示;圖10為對應(yīng)的網(wǎng)側(cè)電流電壓的變化情況;圖11為有功功率跟蹤變化情況;由仿真結(jié)果我們可以直觀的地得到,本文所設(shè)計(jì)的控制器能夠較好地跟蹤Iq和Id電流的變化,交流測電壓和電流能夠較快地恢復(fù)到額定狀態(tài);有功功率能夠快速地跟蹤到所設(shè)定的規(guī)定值;即本文所設(shè)計(jì)的模糊雙環(huán)自適應(yīng)電流電壓控制器能夠有較強(qiáng)的快速性和抗干擾性。
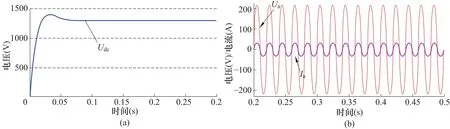
圖8 直流電壓和交流電壓電流Fig.8 DC voltage & AC voltage current
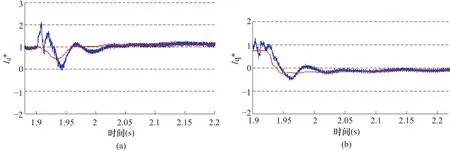
圖9 Id、Iq電流Fig.9 Id & Iq current
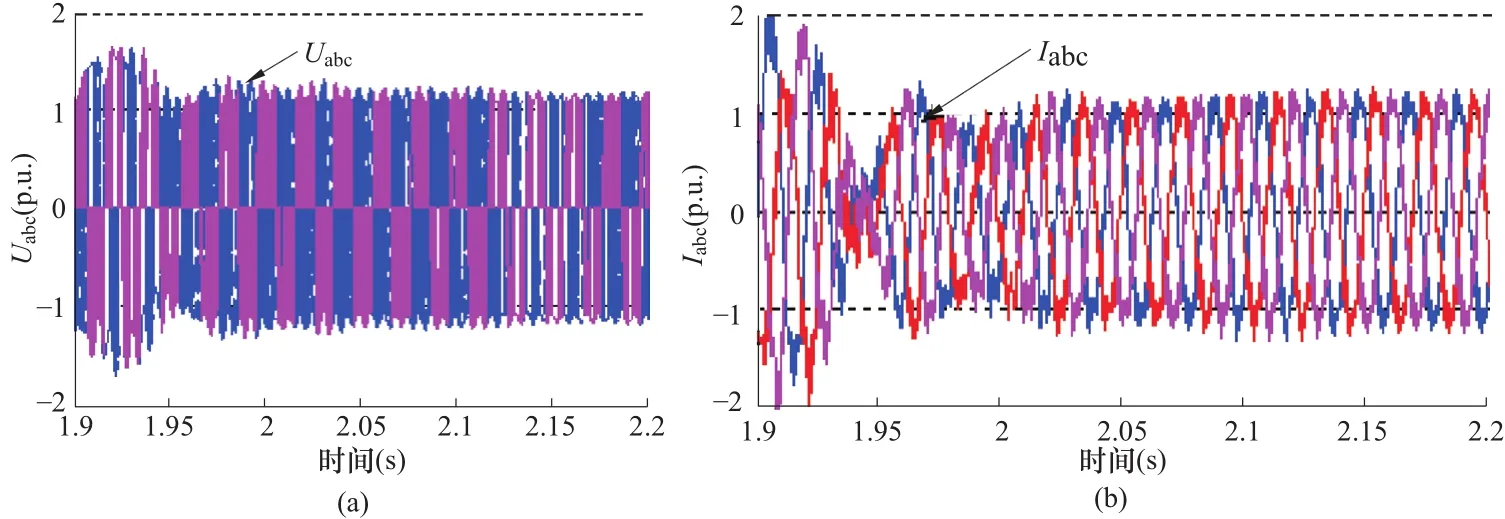
圖10 交流電壓和交流電流Fig.10 AC voltage & AC current
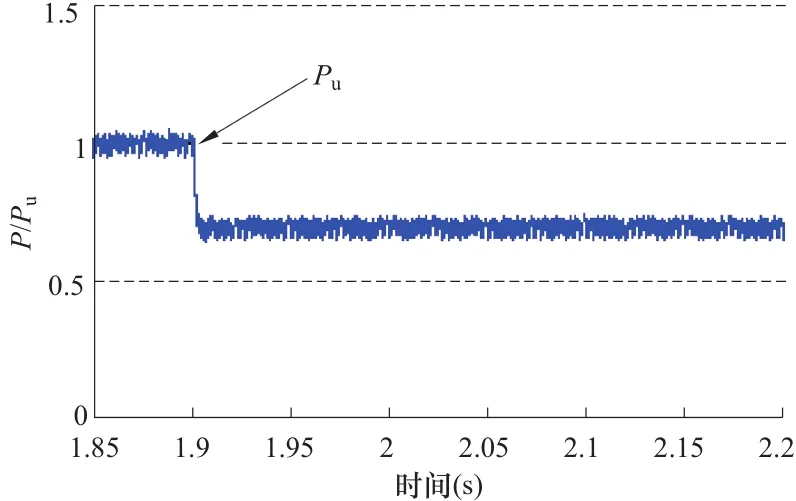
圖11 有功功率跟蹤Fig.11 Active power tracking
6.3 VSC-HVDC逆變側(cè)三相接地短路故障分析
當(dāng)逆變側(cè)在1s時(shí)突然發(fā)生三相接地短路,短路時(shí)間持續(xù)50ms,在1.05s時(shí)故障切除,整流側(cè)A相電流和系統(tǒng)直流側(cè)電壓情況如圖12(a)和圖13(a)所示。傳統(tǒng)方式下逆變側(cè)的三項(xiàng)電流在故障發(fā)生過后0.1s進(jìn)入穩(wěn)定,本文所設(shè)計(jì)的策略在逆變側(cè)三相電流發(fā)生故障后0.06s后進(jìn)入穩(wěn)定狀態(tài);系統(tǒng)直流側(cè)電壓如圖12(b)和圖13(b)所示,在電壓波動(dòng)0.18p.u.后,后者能在0.05s內(nèi)進(jìn)入穩(wěn)定狀態(tài),而前者需要0.9s達(dá)到穩(wěn)定。
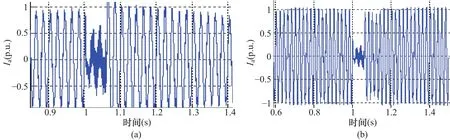
圖12 A相交流電流Fig.12 A phase AC current
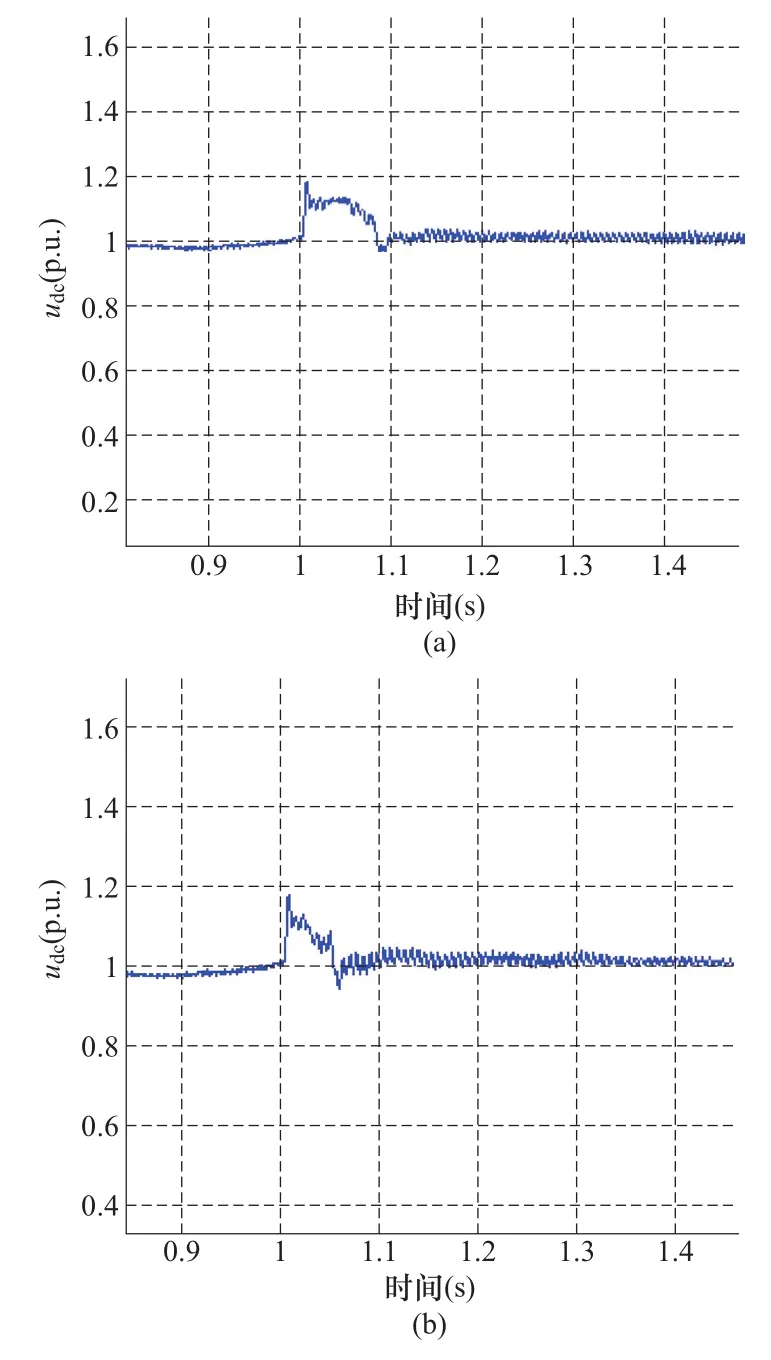
圖13 直流電壓變化Fig.13 DC voltage change
7 結(jié)束語
基于電壓源換流器的高壓直流輸電技術(shù)(VSCHVDC)具有其獨(dú)特的多種優(yōu)勢,如可實(shí)現(xiàn)有功功率和無功的單獨(dú)控制和解耦控制,可實(shí)現(xiàn)潮流翻轉(zhuǎn),無需補(bǔ)償無功,更適用于遠(yuǎn)距離新能源的并網(wǎng),既作為構(gòu)建智能電網(wǎng)的重要組成部分,還可以解并網(wǎng)帶來的電網(wǎng)穩(wěn)定性和電能質(zhì)量問題。本文所設(shè)計(jì)的換流器控制器策略具有以下優(yōu)點(diǎn):
(1)本文運(yùn)用改進(jìn)粒子群優(yōu)化算法可以快速尋找到合適的控制器參數(shù),這就使得在系統(tǒng)發(fā)生突然變化時(shí)具有快速性。從仿真結(jié)果可以看出,該設(shè)計(jì)方法具有很強(qiáng)的動(dòng)態(tài)跟蹤能力。
(2)本文利用模糊自適應(yīng)原理在系統(tǒng)運(yùn)行過程中發(fā)生波動(dòng)變化時(shí),控制器可以根據(jù)實(shí)際運(yùn)行情況更新控制器參數(shù),使得系統(tǒng)具有良好的適應(yīng)性和魯棒性。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17