基于ABB-TRB1410的噴涂機器人應用
2018-08-21 08:11:26戴黃峰
花炮科技與市場 2018年2期
關鍵詞:程序
戴黃峰,鄭 闖
(1.嘉興技師學院,浙江 嘉興 314000;2.沈陽職業技術學院汽車分院,遼寧 沈陽 110015)
隨著世界科學技術生產力地不斷發展,人類工業生產逐步從自動化向智能化生產過度,其中,工業機器人的應用成為引領這場“工業4.0”革命的關鍵。工業機器人在現階段各國工業生產中,已經得到了較為廣泛的應用,尤其在汽車生產行業中,汽車的裝配、焊接、噴涂等環節都離不開工業機器人的參與。工業機器人具有穩定性強、精準度高、可持續工作、生產效率高等優點,適用于批量生產的行業中。相較于人類生產,工業機器人可以避免人類疲憊、粗心、情緒化等劣勢。
1 系統組成
1.1 整體構成
噴涂工業機器人以ABB公司的TRB1410六自由度機器人為核心,配以對應的機器人控制器和示教器進行控制,以可兼容的自動噴槍為噴涂手段,以特定涂料罐存儲油漆,以PLC及其外圍元件控制整個噴涂系統的啟停。根據工廠現場欲噴涂零件的實際尺寸和噴涂工作面,確定噴涂空間,建立良好的噴漆防護,同時要確定噴涂對象需要噴涂幾種顏色和類型的噴漆,建立良好的噴涂作業工作臺和物料運送、固定的平臺。
1.2 涂料罐和自動噴槍
涂料罐的作用是儲存噴涂的漆料,不同顏色油漆必須使用不同的涂料罐。涂料罐由進氣口、出氣口、涂料出口、壓力調節閥、安全閥、泄氣開關、攪拌桿及葉輪、風量調節閥構成,涂料采用氣動形式輸送至噴槍,故現場還需配置一臺空氣壓縮機。其中攪拌桿和葉輪的作用是防止漆料在罐內凝固,在噴涂前和噴涂時要進行持續攪拌。
自動噴槍采用WRA-101-082P型,可以與ABBTRB1410機器人兼容。噴槍的作用是在機器人關節按照預定軌跡運行至噴漆部位時,持續并均勻對目標工件噴漆作業。如圖1所示是涂料罐、自動噴槍及其附屬器件的標準連接圖。
1.3 PLC及外圍元件
PLC即可編程邏輯控制器,本噴涂系統中選用西門子公司S7-200型號的PLC,并在外圍配置一個啟停控制器、門禁控制器。其中啟停控制器包含一個啟動按鈕、一個停止按鈕和一個急停按鈕,放置在噴漆工作隔離區域外,以便工人操作;門禁控制器采用一個限位開關實現,安置在工作區域門處,當門未關閉或工作中門被開始時,立即向機器人控制器發出停止工作信號,停止機器人當前所有操作,以防止發生工作意外。
1.4 機器人控制器和示教器
機器人控制器選用ABB公司的IRC5控制器,該控制器為緊湊型控制器,用于對工業機器人的控制與操縱,具有輸入輸出接口,并與編程控制示教器相連,實現對工業機器人的編程、調試與運行控制等功能。其中,示教器所完成的功能是對機器人進行手動操縱、程序表寫調試、參數配置和監控的手持設備,是目前所有種類工業機器人必備的設備之一。
ABB的示教器是觸屏和搖桿操作,具有控制方便的特點。此外,示教器具有急停開關、數據備份用USB接口、使能器按鈕、觸摸屏專用筆和示教器復位按鈕。
2 系統I/O分配
如下表所示為機器人控制器與PLC的I/O分配表。其中在機器人控制器的輸入中,由PLC發出伺服開啟或關閉的信號至機器人控制器,以此控制工業機器人六個伺服電機的使能與禁止,只有伺服使能后,才能實現后續對機器人的控制。控制機器人啟動、暫停和噴涂以及主程序的系統,分別由PLC輸出一個數字信號至機器人控制器內完成。
在機器人控制器輸出中,當機器人開始運行和動作完成時,向PLC發出數字信號的指令。同時,機器人控制器使用6個輸出口分別控制2個涂料罐、2個噴幅閥和2個送料閥。如表1所示。
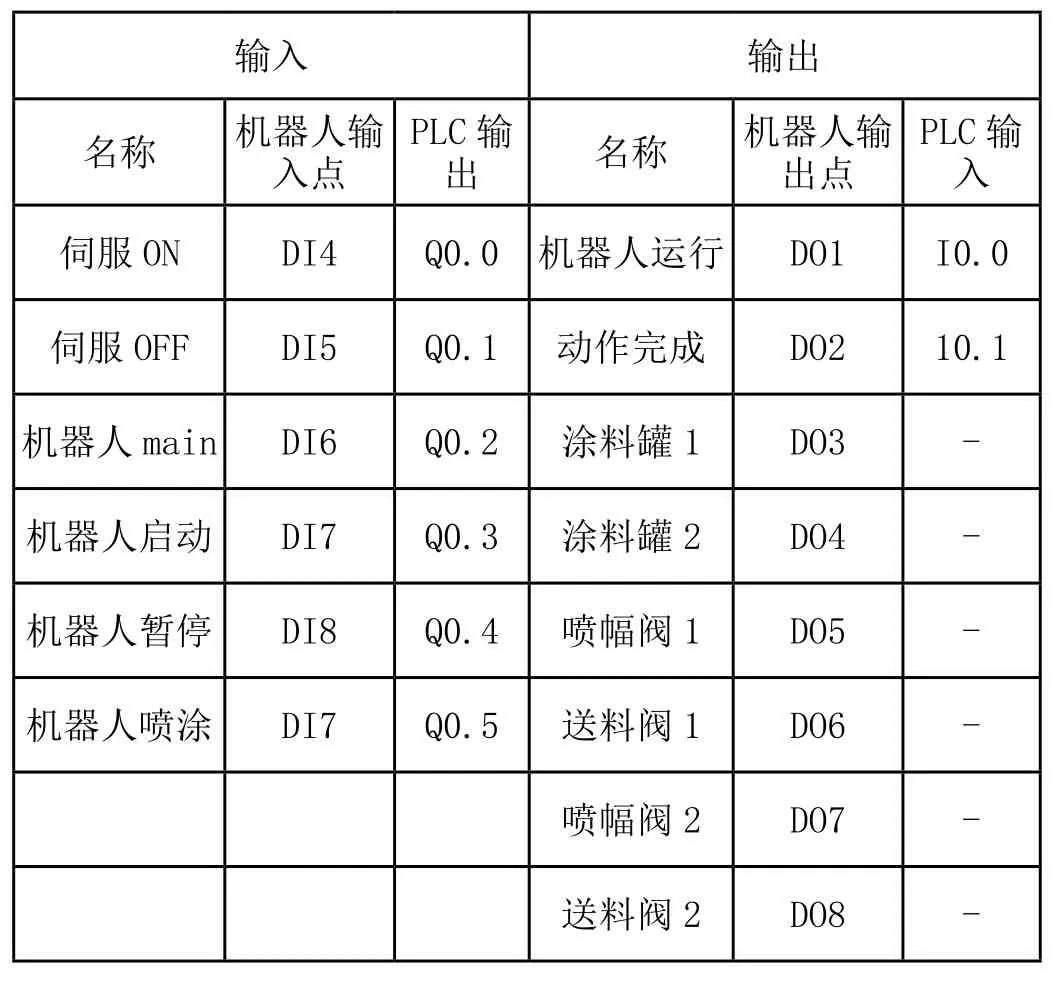
表1 機器人控制器與PLC的I/O分配表
3 PLC程序設計
PLC程序采用西門子STEP-7軟件編程,本系統中包含三部分程序,分別是機器人啟動程序、機器人運行暫停程序和外部急停程序,分別如圖2左、中、右所示。其中,機器人啟動程序中,包含2秒的延遲,即按下啟動按鈕后,2秒后機器人啟動運行。
4 機器人編程
機器人編程主要包含對機器人運行軌跡的控制和噴槍、儲料罐的控制。其中,最核心的部分是機器人軌跡的程序編寫。機器人運動軌跡即噴槍相對工件所走過的噴涂路徑,在運行過程中對工件部位進行噴漆操作。本系統中機器人程序中包含主程序、噴槍控制程序和軌跡程序。主程序中主要功能是進行設備整體運行初始化,完成對PLC信號的判斷、發出使能信號和檢查各模塊運行狀態,待所有準備工作就緒后,運行噴涂程序。噴槍控制程序主要包含兩點:霧化和上料。在準備噴涂前,首先要先控制噴槍做霧化處理,再進行漆料上料噴涂作業,其目的是使噴涂漆料更加均勻。
軌跡程序的編寫方法是,先采用示教器通過手動操縱方式,使噴槍運行至各個噴涂關鍵點,每次操縱確定的位置點必須保證與工件的噴涂距離,并采用適當的軌跡移動方式,主要包含直交、關節、圓弧等。一般常用MoveL為直線運行、MoveJ為關節運行、MoveC為圓弧運行。根據不同的噴涂工件選取不同的軌跡路徑,以達到噴涂全覆蓋、噴漆均勻的目的。在編寫程序時,每一條的運動指令中還要包含運行速度,一般在手動操縱對點時速度不宜過快,而在自動運行時,可以在保證噴漆穩定性的前提下提高運行速度百分比。程序編寫后必須手動運行一次軌跡,方可自動運行。
采用示教器編程時,可以直接選取編程關鍵指令,如增加MoveJ指令時,直接在編程界面右側點擊MoveJ即可,隨后在指令后選取位置點參數,隨后通過手動示教至位置點后,替換當前位置信息即可將當前位置參數信息存入該點。
5 結束語
文章介紹了一款基于ABB-TRB1410六自由度工業機器人的自動噴涂機器人的應用實例,通過描述系統構成和PLC、機器人編程方法,為實際采用噴涂機器人完成噴漆工作提供參考。在今后,隨著工業機器人不斷發展和進步,越來越多的工業機器人將加入生產過程中,只有不斷提升工業機器人應用水平,才能更好地服務我國“中國制造2025”的戰略目標。
猜你喜歡
電腦愛好者(2020年6期)2020-05-26 09:27:33
人大建設(2019年12期)2019-05-21 02:55:44
中山大學法律評論(2018年1期)2018-03-30 01:21:00
瞭望東方周刊(2017年42期)2017-12-05 18:49:38
環球時報(2017-03-30)2017-03-30 06:44:45
信息安全與通信保密(2016年3期)2016-08-23 01:23:56
山西省政法管理干部學院學報(2016年2期)2016-07-31 18:19:34
山西省政法管理干部學院學報(2016年2期)2016-07-31 18:19:25
中國衛生(2015年3期)2015-11-19 02:53:32
政治與法律(2014年11期)2014-03-01 02:20:40
