民航智能電動行李傳送車結構與功能設計*
2018-08-21 10:26:18張嘉德洪英漫賈丹陽
科技與創新 2018年16期
楊 利,劉 洋,張嘉德,洪英漫,賈丹陽
(中國民航大學 航空工程學院,天津 300300)
近年來,國家重點關注新能源的領域開發和使用,民航局為響應國家節能減排的號召、滿足社會品質提高的需求,提出了建設“生態機場”的目標,將電動特種車輛引入民航機場建設。其中,行李傳送帶車作為一種可移動式的行李傳送裝置,可以將旅客的行李箱或者規定范圍內的貨物安全、穩定、快速地運送進出飛機的底倉,或者用于不同高度位置之間傳送貨物的專用設備[1],無論在民用機場,還是軍用機場都是一種必不可少的機坪設備,而且是使用程度非常高的一種特種車輛。
目前,機場使用的行李傳送車大多是基于傳統特種車輛底盤進行改造,尚未實現系統化設計及最優布局,普遍存在結構與電動車特性不匹配的問題[2],導致續航能力弱、車體笨重、操作不便等問題出現。基于此,本文提出一種電動模式下的整車模塊化設計方案,并結合多體動力學和有限元計算方法對車輛主體結構進行系統的優化計算,最終得到輕量化車體結構并進行校核分析,同時,結合多種傳感器和北斗衛星定位模塊搭建模型車輛,運用MATLAB軟件建立數學模型,通過蟻群算法對行李傳送車場地內的行駛路徑進行規劃仿真,并設計實現了電動行李車的避障功能。
1 雙缸驅動舉升機構優化設計
行李傳送車的主要運動機構在舉升模塊,該機構對于保障行李的安全運送至關重要,任何600 mm×800 mm面積的傳送質量在400 kg以下。圖1為舉升機構簡圖,其中,傳送帶裝置長度為8 m,傳送帶舉升前角度為5°,舉升后角度為24°,前支撐架長度2.5 m,后支撐架長度1 m,后支撐架與傳送帶的鉸點距傳送帶后端0.5 m,前支撐架橫梁距前支撐架與車體鉸點距離h1,前液壓缸組件與車體鉸點距前支撐架與車體鉸點X1,后支撐架橫梁距后支撐架與車體鉸點距離h2.
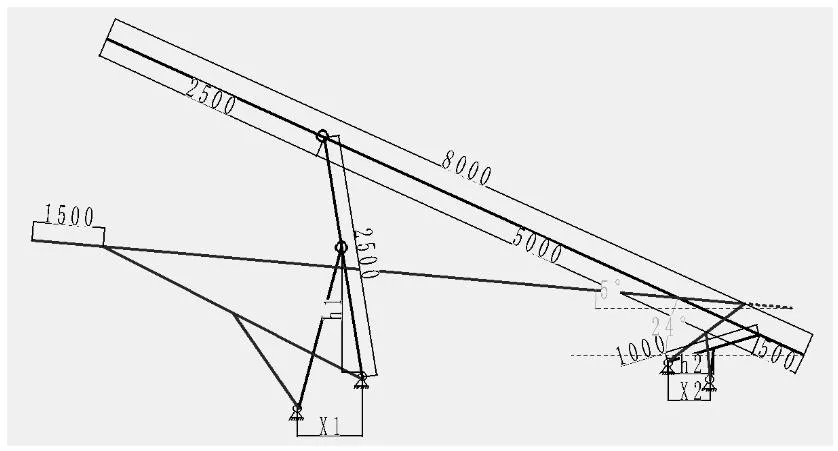
圖1 舉升機構簡圖
圖2為前推桿鉸點各位置下H形架橫梁受力圖。根據受力圖我們可以看出,前H形架的橫梁的受力在仿真過程中,是呈不斷減小的趨勢的,最大值出現在仿真剛剛開始的時候。通過10次同時改變H形架的橫梁與豎梁的兩個鉸點的橫縱坐標,我們得出10條不同的H形架的橫梁的受力圖。根據受力表中的數據,我們可以看到,受力最小的點發生在H形架橫梁到H形架與車底盤鉸點距離為1 150 mm時,最小值為30 284.3 N。
根據受力圖我們可以看出,后H形架的橫梁的受力在仿真過程中,是呈不斷增大的趨勢的,最大值出現在仿真就要結束的時候。通過5次同時改變H形架的橫梁與豎梁的兩個鉸點的橫縱坐標,我們得出5條不同的H形架的橫梁的受力圖。根據受力表中的數據,我們可以看到受力最小的點發生在H形架橫梁到H形架與車底盤鉸點距離為400 mm時,最小值為41 582.3 N。
經多體動力學分析[4-5]計算后,得到前、后舉升推桿的受力曲線一般規律,在運動仿真過程中參數值無突變、驟停以及干涉問題。為了優化舉升過程,將H形架的橫梁和左右兩邊豎梁的鉸點以及推桿與車底盤的鉸點進行參數化分析,如圖6和圖7所示。最終得到優化位置結果如表1所示,對于前推桿與車底盤的鉸點位置的優化,效果尤為明顯,使前H形架橫梁的受力減小將近6倍。對前H形架的橫梁和左右兩邊豎梁的鉸點的優化,雖然沒有對前絲杠與車底盤的鉸點位置的優化效果這么明顯,但是也起到了減小H形架橫梁的受力的作用。雖然對后H形架我們只優化了橫梁和左右兩邊豎梁的鉸點,但是也起到了一定的減小后H形架橫梁的受力的作用。
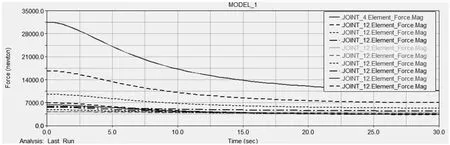
圖2 前推桿鉸點各位置下H形架橫梁受力圖

表1 雙缸驅動舉升機構優化前后對比
2 無人駕駛模式設計及模型制作
本研究主要設計自動駕駛和避障功能的智能化機場電動行李車。行李車在預設的機場地圖中運行,如圖3所示,通過接收任務模塊信息,自動規劃出最優路徑。在車輛行進過程中,能夠自主識別障礙物并避讓或緊急制動。同時,車輛擁有緊急預處理系統,可通過手動改善車輛的行駛狀態,保證其安全性與穩定性。
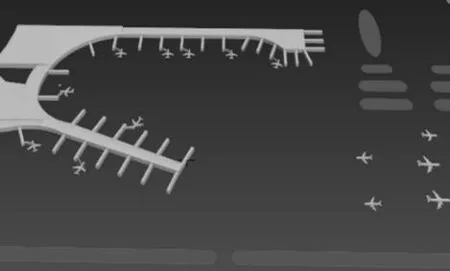
圖3 機場布局簡化圖

圖4 路徑規劃仿真效果圖
先進行行李車路徑規劃仿真。由于民用機場環境設施、車輛、機位等位置較為固定,因此,利用MATLAB軟件將機場停機坪固定障礙分布信息輸入地圖矩陣當中,得到仿真地圖,選用適用于分析信息已知且環境較穩定的蟻群算法進行最優路徑仿真。將行李車起始坐標及目標機位的終點坐標輸入程序中,進行100~500次迭代運算,繪制出了最優路徑規劃仿真路線,如圖4所示。在進行多次MATLAB全局路徑規劃仿真后,綜合分析得出最優路線,對仿真路線進行離散化取值,將離散坐標點的坐標值導入車輛的行駛操作程序,再由上位機連接藍牙遠程操作車輛選擇任務機位,車輛接收指令并執行對應的路線行駛程序,自主移動至目標處。在車輛自主移動過程中,如果遇到移動障礙物,則會進行緊急制動并發出警告,執行避障程序,待遠離移動障礙物后,繼續按既定路線行駛。控制核心選用STM32F103主控芯片,外接藍牙傳輸模塊、電機驅動模塊等,系統框圖如圖5所示。
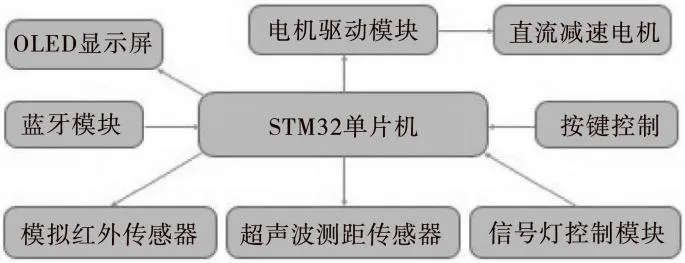
圖5 硬件模塊系統結構
在避障模塊中,我們使用模擬紅外傳感器和超聲波測距傳感器檢測車輛周圍障礙距離。主控單片機計算采集到的傳感器數據,輸出一定占空比的PWM波及轉向信號給電機驅動,改變直流電機的工作狀態,實現避障功能。
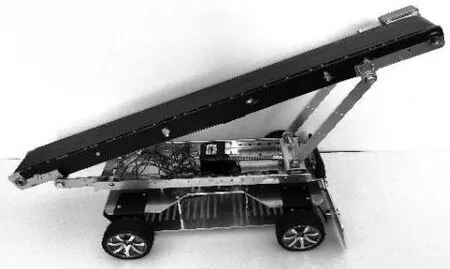
圖6 行李傳送車模型車
我們采用鋁合金加工、3D打印等技術,完成了電動行李車的模型制作,如圖6所示。模型車輛搭載多傳感器,完成自動避障功能測試。通過傳感器采集周圍環境信息并反饋給單片機,單片機處理數據改變車輛轉彎、直行、掉頭等行駛狀態,同時加入了按鍵控制、信號燈指示和動態顯示屏,可對小車行駛參數作微調整,指示車輛當前行駛狀態。
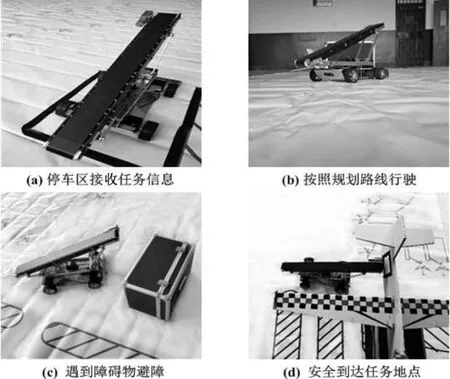
圖7 模型車功能測試
在我們設計的模擬沙盤環境中,通過上位機給車輛發送任務指令,圖7(a)所示模型車正在停車區接收任務指令,車輛從起始位置接收到任務信息后,按照既定路線行駛;圖7(b)為車輛行進狀態,行駛過程中遇到移動障礙物時,車輛會緊急制動或避讓,同時警示信號燈亮起;圖7(c)為車輛在運行過程檢測到障礙物時正在采取緊急制動措施;當障礙物移開后,車輛恢復運行并最終到達任務點,如圖7(d)所示。
3 結束語
本作品研究的民航智能電動行李傳送車,除了滿足其作為可移動式行李傳送裝置的基本功能要求外,還具有自行路徑規劃和緊急制動、避障功能,在響應國家節能減排和民航內特種車輛“油改電”計劃號召的同時,符合未來綠色化、智能化的機場建設理念,對于今后研發智能化電動特種車輛具有一定的理論和應用參考價值。
