基于MEMS傳感器的人體運(yùn)動(dòng)識(shí)別系統(tǒng)
2018-08-15 08:02:44李元良史中權(quán)李少輝李嘉昕陳富東王瑞琪丁漢祥
計(jì)算機(jī)應(yīng)用與軟件 2018年8期
李元良 史中權(quán) 李少輝 李嘉昕 陳富東 王瑞琪 丁漢祥
(河海大學(xué)機(jī)電工程學(xué)院 江蘇 常州 213022)
0 引 言
近年來,智能穿戴產(chǎn)品及其技術(shù)推廣不斷深入,市場上的各種智能手環(huán)、智能手表層出不窮,也給人們帶來了新奇的運(yùn)動(dòng)記錄和分析體驗(yàn)。然而市場上大多數(shù)可穿戴設(shè)備諸如手環(huán)等產(chǎn)品只包含計(jì)步、里程、卡路里消耗等數(shù)據(jù)的記錄及分析功能,并沒有針對(duì)某類體育運(yùn)動(dòng)的動(dòng)作識(shí)別和計(jì)數(shù)功能。為方便教練員更好地分析運(yùn)動(dòng)員在訓(xùn)練和比賽中的表現(xiàn),人們希望能夠記錄運(yùn)動(dòng)員在場上的技術(shù)動(dòng)作次數(shù)。以往采用錄像回放來分析運(yùn)動(dòng)員數(shù)據(jù),這不僅費(fèi)時(shí)也費(fèi)力,因此希望借助于更加輕便的可穿戴設(shè)備來實(shí)現(xiàn)運(yùn)動(dòng)識(shí)別和計(jì)數(shù)。本文研究的基于MEMS傳感器的人體運(yùn)動(dòng)識(shí)別系統(tǒng)適用于專業(yè)乒乓球和羽毛球領(lǐng)域,可識(shí)別包括走跑、乒乓球正反手、羽毛球正反手、羽毛球挑球以及靜止等7種動(dòng)作的識(shí)別及計(jì)數(shù)。
目前國內(nèi)外學(xué)者已經(jīng)展開人體運(yùn)動(dòng)識(shí)別算法的研究。Allen等[1]采用分布式傳感器網(wǎng)絡(luò)進(jìn)行人體動(dòng)作識(shí)別,提出一種線性結(jié)算方法來處理傳感器網(wǎng)絡(luò)數(shù)據(jù),但傳感器較多,數(shù)據(jù)量較大,實(shí)時(shí)性不高。李峰等[2]利用手機(jī)自帶加速度計(jì)和陀螺儀傳感器采集人體運(yùn)動(dòng)數(shù)據(jù),并對(duì)原始數(shù)據(jù)的時(shí)域和頻域進(jìn)行了分析,提取了相關(guān)特征值。再利用J48決策器結(jié)合Markov模型得到識(shí)別結(jié)果,能夠識(shí)別人上樓、下樓,跑動(dòng)、走路、靜止等狀態(tài)。但該算法只可識(shí)別一段時(shí)間內(nèi)人的某種狀態(tài),并不能對(duì)動(dòng)作進(jìn)行計(jì)數(shù)。周林等[3]同樣采用決策樹并采用加窗處理實(shí)現(xiàn)人體下蹲、躺等動(dòng)作的識(shí)別,但由于采用加窗處理,仍然無法對(duì)任意一個(gè)單獨(dú)的動(dòng)作進(jìn)行分割,難以實(shí)現(xiàn)計(jì)數(shù)功能。此外以上兩篇文獻(xiàn)中都采用了決策樹分類算法。該算法較適用于處理非數(shù)值類型的數(shù)據(jù),而不擅長連續(xù)數(shù)據(jù)類型,并且該算法自學(xué)習(xí)能力較差,需要為每一個(gè)運(yùn)動(dòng)員定制不同的邏輯規(guī)則[4],計(jì)算量也較為龐大。當(dāng)識(shí)別類型增多,規(guī)則也將更加復(fù)雜,這大大增加了模型識(shí)別錯(cuò)誤率。因此為滿足適用性及精度需求,本文采用BP神經(jīng)網(wǎng)絡(luò)作為分類器。該算法具有很強(qiáng)的學(xué)習(xí)反饋能力,通過學(xué)習(xí)每一個(gè)運(yùn)動(dòng)員的運(yùn)動(dòng)數(shù)據(jù)樣本,不斷更新網(wǎng)絡(luò)參數(shù),達(dá)到越訓(xùn)練越準(zhǔn)的效果。此外本文采用了動(dòng)作分割算法確定每一個(gè)動(dòng)作的起點(diǎn)和終點(diǎn),實(shí)現(xiàn)了對(duì)各類動(dòng)作的計(jì)數(shù)功能。
1 運(yùn)動(dòng)識(shí)別系統(tǒng)搭建
人在球場上做揮拍、跑動(dòng)等動(dòng)作時(shí),持拍手臂主要有兩方面的變化:一是手臂的移動(dòng);二是手臂的旋轉(zhuǎn)[5]。因此可利用MEMS傳感器采集持拍手臂三軸加速度以及三軸角速度信號(hào),加速度信號(hào)體現(xiàn)手臂的移動(dòng),角速度信號(hào)體現(xiàn)手臂的旋轉(zhuǎn)。MEMS傳感器是采用微電子和微機(jī)械加工技術(shù)制造出來的新型傳感器,具有體積小、質(zhì)量輕、功耗低等特點(diǎn),適用于可穿戴設(shè)備等嵌入式應(yīng)用[6]。
本文研究的運(yùn)動(dòng)識(shí)別系統(tǒng)包括MEMS人體信號(hào)采集裝置以及PC端軟件。MEMS人體信號(hào)采集裝置負(fù)責(zé)采集人體持拍手臂的三軸加速度、三軸角速度以及三軸姿態(tài)角信號(hào),通過藍(lán)牙模塊將原始數(shù)據(jù)上傳至PC端軟件,PC端軟件對(duì)數(shù)據(jù)進(jìn)行解碼并利用運(yùn)動(dòng)識(shí)別算法得出識(shí)別結(jié)果。該識(shí)別算法可識(shí)別乒乓球正反手、羽毛球正反手、羽毛球挑球、跑動(dòng)、靜止等7種動(dòng)作。軟件每隔20 s調(diào)用一次運(yùn)動(dòng)識(shí)別算法,并更新顯示界面。
1.1 MEMS人體信號(hào)采集裝置搭建
圖1為MEMS人體信號(hào)采集裝置結(jié)構(gòu),采用STM32系列處理器作為主控芯片,通過YJ901模塊采集人體三軸加速度、三軸角速度以及三軸姿態(tài)角等數(shù)據(jù)。YJ901模塊集成了MEMS傳感器,該模塊利用卡爾曼濾波技術(shù)融合MEMS傳感器輸出的三軸加速度和三軸角速度信號(hào),計(jì)算出三軸姿態(tài)角[7],通過串口輸出人體數(shù)據(jù),STM32處理器則以100 Hz的采樣頻率采集YJ901模塊輸出的人體信號(hào),并通過藍(lán)牙HC-31模塊以115 200的波特率將數(shù)據(jù)上傳至PC端上位機(jī)。此外,人體信號(hào)采集裝置配備了充電管理芯片,可實(shí)現(xiàn)對(duì)120 mAh鋰電池進(jìn)行充電。
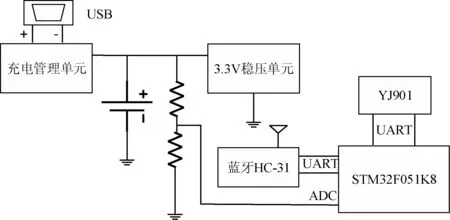
圖1 MEMS人體信號(hào)采集裝置結(jié)構(gòu)
1.2 PC端上位機(jī)軟件搭建
圖2為PC端上位機(jī)軟件框架,該軟件負(fù)責(zé)接收來自MEMS人體信號(hào)采集裝置的加速度、角速度、姿態(tài)角等原始信號(hào),并集成了主要的運(yùn)動(dòng)識(shí)別算法。軟件接收到原始數(shù)據(jù)后,分別對(duì)數(shù)據(jù)進(jìn)行本地存儲(chǔ)和繪圖;當(dāng)軟件模式選擇為競賽模式時(shí),軟件將對(duì)原始數(shù)據(jù)進(jìn)行動(dòng)作分割、特征值提取,并從本地?cái)?shù)據(jù)庫或云端數(shù)據(jù)庫調(diào)用神經(jīng)網(wǎng)絡(luò)模型參數(shù),并輸出識(shí)別結(jié)果至軟件界面;當(dāng)軟件選擇為網(wǎng)絡(luò)訓(xùn)練模式時(shí),進(jìn)入BP神經(jīng)網(wǎng)絡(luò)訓(xùn)練狀態(tài),球員重復(fù)某種運(yùn)動(dòng)類型來提供神經(jīng)網(wǎng)絡(luò)所需樣本,軟件同樣也需要進(jìn)行動(dòng)作分割與特征值提取這兩個(gè)過程來生成新的訓(xùn)練樣本,用此來訓(xùn)練神經(jīng)網(wǎng)絡(luò),并將更新的網(wǎng)絡(luò)參數(shù)上傳入本地與云端數(shù)據(jù)庫,給競賽模式下的神經(jīng)網(wǎng)絡(luò)提供網(wǎng)絡(luò)參數(shù)。
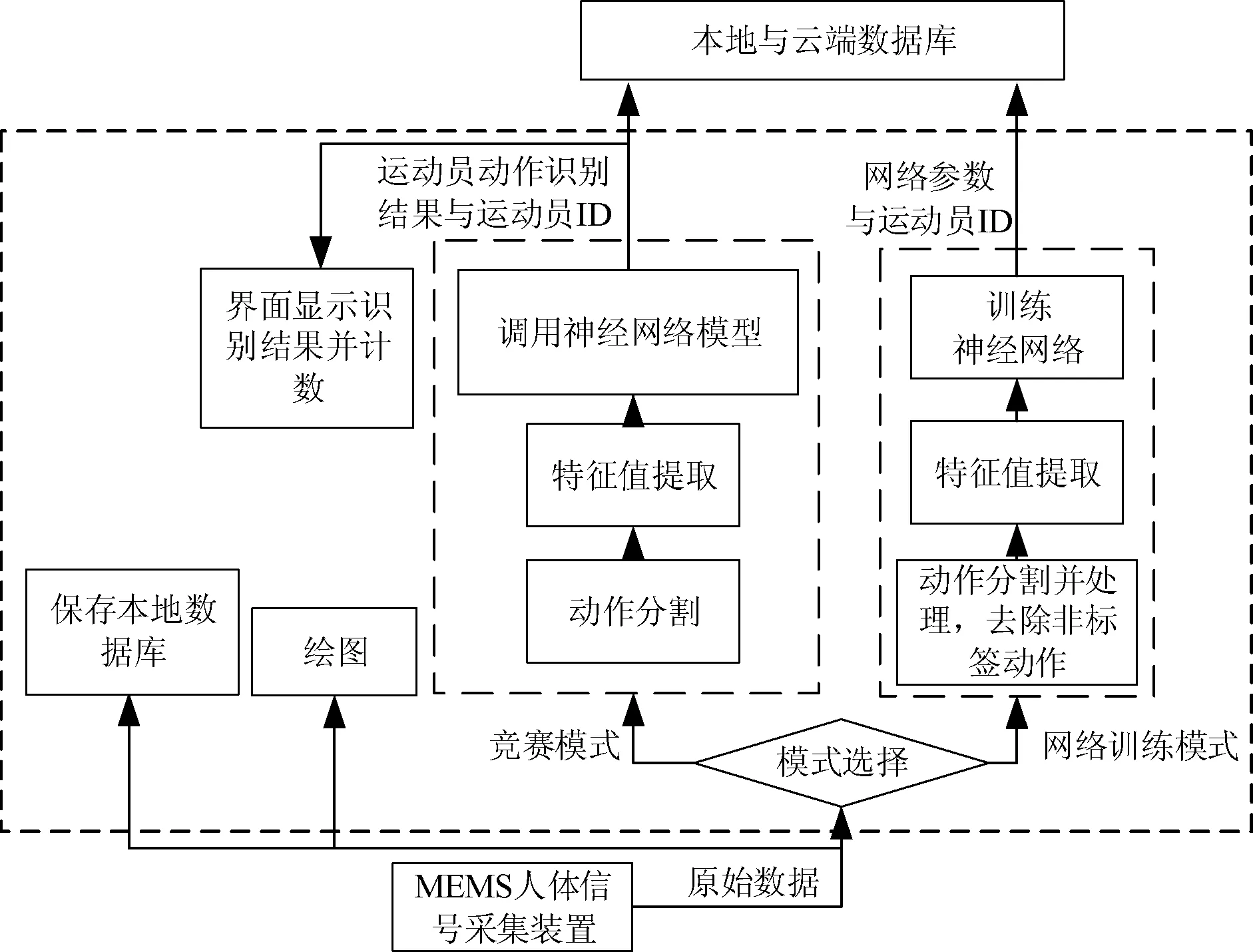
圖2 PC端上位機(jī)軟件框架
2 運(yùn)動(dòng)識(shí)別方法研究
本文提出的運(yùn)動(dòng)識(shí)別算法流程如圖3所示,包括動(dòng)作分割模塊以及模式識(shí)別模塊。動(dòng)作分割模塊目的是對(duì)原始數(shù)據(jù)(三軸加速度、三軸角速度和三軸姿態(tài)角)進(jìn)行動(dòng)作區(qū)間分割,從而提取運(yùn)動(dòng)員某個(gè)單一動(dòng)作的數(shù)據(jù),包括信號(hào)選取、平滑處理以及分割點(diǎn)獲取。模式識(shí)別模塊基于BP神經(jīng)網(wǎng)絡(luò)分類器,先根據(jù)得到的分割點(diǎn)信息截取單一動(dòng)作數(shù)據(jù),再對(duì)其進(jìn)行特征值提取,最后輸入訓(xùn)練好的BP神經(jīng)網(wǎng)絡(luò)模型中得到識(shí)別結(jié)果。
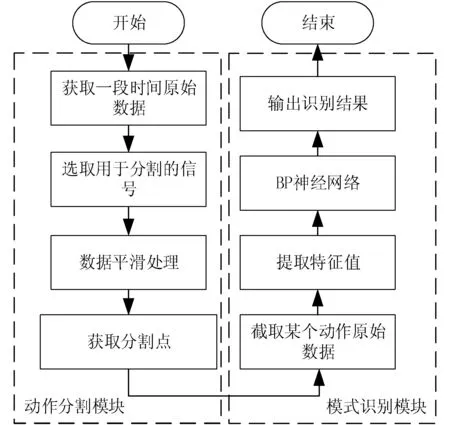
圖3 運(yùn)動(dòng)識(shí)別算法流程圖
2.1 動(dòng)作分割算法
動(dòng)作分割算法作用是將運(yùn)動(dòng)員的一段時(shí)間內(nèi)各個(gè)動(dòng)作分離,并獲知每個(gè)動(dòng)作的起點(diǎn)和終點(diǎn)。動(dòng)作分割算法的精度將直接影響動(dòng)作識(shí)別精度以及動(dòng)作計(jì)次精度。文獻(xiàn)[8]采用基于閾值的方法來分割合成加速度信號(hào),便于實(shí)現(xiàn)人體手勢識(shí)別,但該方法適合應(yīng)用于手部動(dòng)作從靜止到啟動(dòng)再到靜止的過程,及動(dòng)作前后手臂狀態(tài)為靜止的情況。而本文中佩戴人體信號(hào)采集裝置的運(yùn)動(dòng)員往往會(huì)連續(xù)地做各種不同動(dòng)作,因此不適用于本研究。文獻(xiàn)[9]采用尋找加速度信號(hào)波峰的方法來實(shí)現(xiàn)走路計(jì)步,但該方法只適用于簡單動(dòng)作的計(jì)次,面對(duì)存在多個(gè)局部波峰的復(fù)雜動(dòng)作,該方法將帶來較大誤差。本文采用的動(dòng)作分割算法可分割連續(xù)復(fù)雜動(dòng)作,有助于提高動(dòng)作識(shí)別以及計(jì)次精度。
如圖3所示的算法流程圖,動(dòng)作分割算法首先需從X、Y、Z軸加速度,X、Y、Z軸角速度以及X、Y、Z軸姿態(tài)角這9種信號(hào)中選擇一個(gè)信號(hào)波幅相對(duì)較大、局部波峰波谷相對(duì)較少的信號(hào)。這樣有利于在后期平滑濾波中去除局部波峰波谷,提高動(dòng)作分割精度。由于三軸姿態(tài)角信號(hào)范圍為-180°到180°,當(dāng)姿態(tài)角超過180°后,信號(hào)會(huì)突變?yōu)?180°,易產(chǎn)生對(duì)波峰波谷的誤判,因此只分析三軸加速度以及三軸角速度的波形。圖4反映了運(yùn)動(dòng)員在連續(xù)做乒乓球正手動(dòng)作時(shí)的加速度與角速度6種信號(hào)波形,可發(fā)現(xiàn)Z軸角速度信號(hào)一個(gè)動(dòng)作周期內(nèi)的局部波峰波谷數(shù)量相對(duì)較少,波幅較大,更適用于有限次數(shù)的平滑處理。這是由于本研究的MEMS人體信號(hào)采集裝置采用如圖5所示的佩戴方式。圖中箭頭表示MEMS傳感器的各軸加速度信號(hào)方向,而各軸角速度方向符合人體右手螺旋法則,人體在做揮拍、走跑等動(dòng)作時(shí),手臂更加傾向于繞Z軸旋轉(zhuǎn)。此后對(duì)羽毛球正手、走路、跑動(dòng)等多種動(dòng)作的各軸信號(hào)進(jìn)行對(duì)比,Z軸角速度信號(hào)仍能體現(xiàn)出較好的可分割性,因此本算法采用該信號(hào)作為分割信號(hào)。

圖4 各軸加速度與角速度信號(hào)波形對(duì)比

圖5 MEMS人體信號(hào)采集裝置佩戴方式
選定Z軸角速度作為分割信號(hào)后,采用平滑濾波的方法去除波形上的少量局部波峰波谷,得到一個(gè)較為光滑的曲線,便于下一步尋找波峰波谷以及零點(diǎn)。
本文采用的平滑濾波算法,又稱移動(dòng)平均濾波法[10]。該方法通過求取滑動(dòng)領(lǐng)域內(nèi)信號(hào)的均值來進(jìn)行去噪,從而讓曲線變得更加平滑,突出整體曲線變化趨勢[11],類似于低通濾波器。領(lǐng)域?qū)挾葘⒂绊憺V波效果寬度較大時(shí),平滑度較高,但靈敏度較低,信號(hào)損失較嚴(yán)重;寬度較小時(shí),平滑度較低,但靈敏度較高。本文希望平滑后的信號(hào)具有較好平滑度,同時(shí)盡量減少信號(hào)損失。通過實(shí)驗(yàn)總結(jié),窗寬為5的平滑濾波效果較良好。式(1)為窗寬為5的平滑濾波公式。

(1)
圖6為平滑前后波形對(duì)比。原始信號(hào)為運(yùn)動(dòng)員做羽毛球正手時(shí)Z軸角速度信號(hào),利用窗寬為5的平滑處理后,去除了原始信號(hào)中的局部波峰波谷,便于下一步尋找每個(gè)動(dòng)作的波峰波谷以及零點(diǎn)。

圖6 平滑前后波形對(duì)比
一般而言,運(yùn)動(dòng)員持拍手臂動(dòng)作從啟動(dòng)到結(jié)束再到下一次動(dòng)作的啟動(dòng)可認(rèn)為是Z軸角速度從0增加到正最大值,再減小到0,又從0降到負(fù)最小值,最后再增加到0的過程。本文以該過程為一個(gè)完整的動(dòng)作,因此通過尋找平滑處理后信號(hào)的零點(diǎn)來確定一個(gè)動(dòng)作的起點(diǎn)和終點(diǎn)。圖7為連續(xù)兩次羽毛球正手動(dòng)作分割示意圖,菱形表示波峰波谷,圓圈表示零點(diǎn)。平滑后的波形使得利用程序較容易找到信號(hào)波峰波谷以及零點(diǎn),并且作為起點(diǎn)或終點(diǎn)的零點(diǎn)左右相鄰分別為波谷和波峰。本文通過圖8所示的方法來尋找動(dòng)作分割零點(diǎn),為了進(jìn)一步減少動(dòng)作細(xì)節(jié)帶來局部波峰波谷,本文在時(shí)間軸上增加了動(dòng)作間隔最小閾值Tmin,通常認(rèn)為人體一個(gè)動(dòng)作的最快完成時(shí)間為0.2 s,凡在這個(gè)時(shí)間段出現(xiàn)的零點(diǎn)將被去除,否則將增加識(shí)別錯(cuò)誤率以及計(jì)數(shù)錯(cuò)誤次數(shù),因此Tmin選定為0.2 s。根據(jù)圖8得到的零點(diǎn)序列為每個(gè)動(dòng)作的起點(diǎn)和終點(diǎn)的橫坐標(biāo),根據(jù)該零點(diǎn)序列到三軸加速度、三軸角速度以及三軸姿態(tài)角這9種原始信號(hào)中截取各個(gè)動(dòng)作數(shù)據(jù)段,從而實(shí)現(xiàn)動(dòng)作分割。
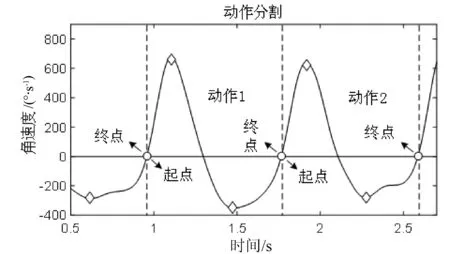
圖7 動(dòng)作分割示意圖
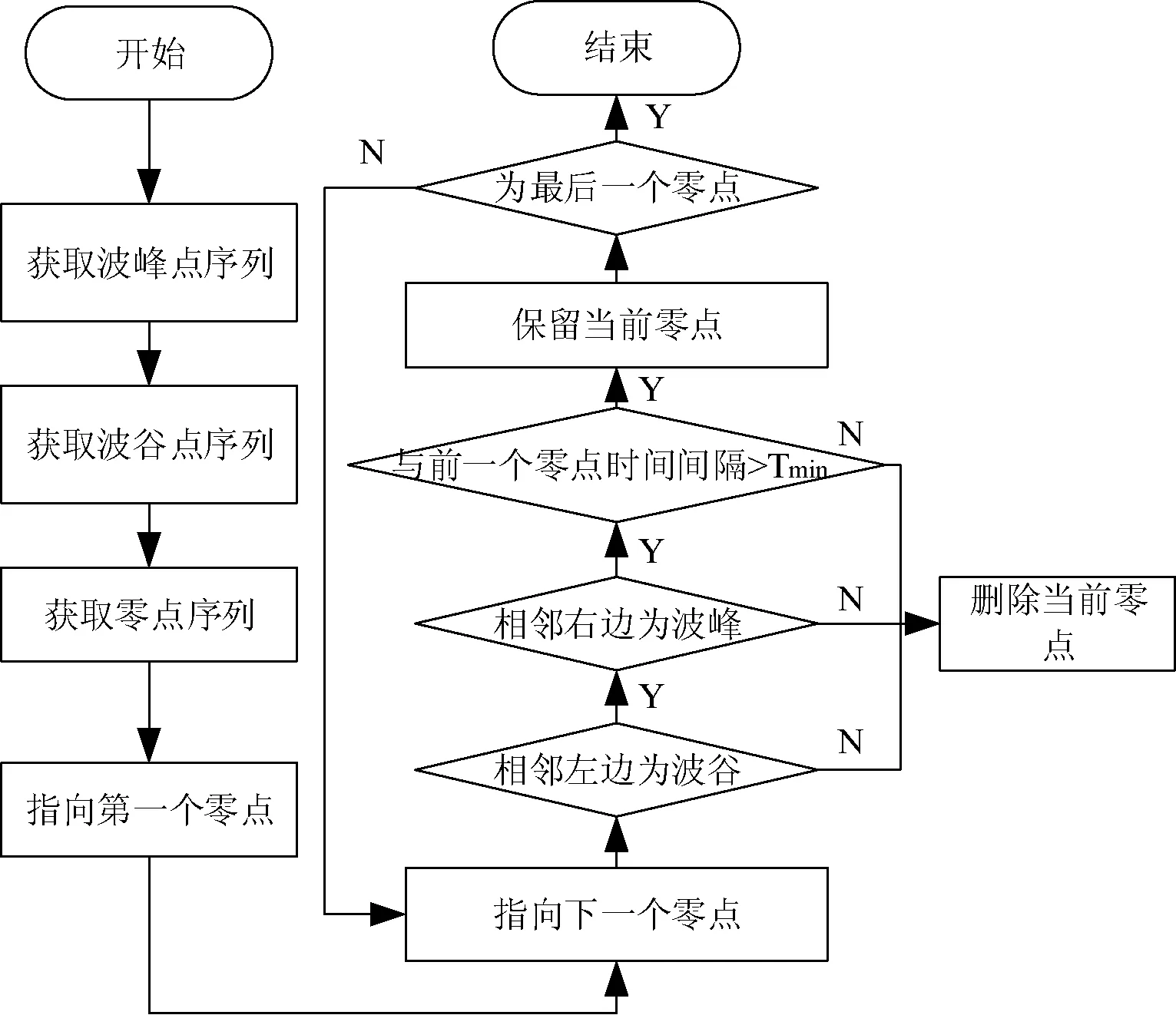
圖8 分割點(diǎn)尋找方法
2.2 特征值提取
動(dòng)作分割結(jié)束后,提取每個(gè)動(dòng)作原始信號(hào)的特征值作為BP神經(jīng)網(wǎng)絡(luò)的輸入。一般信號(hào)的分析方法分為基于時(shí)域、基于頻域以及基于時(shí)頻域的分析方法[6]。本文主要研究基于時(shí)域的信號(hào)分析方法,并從信號(hào)時(shí)域中提取相關(guān)特征量。為充分利用信號(hào)中的信息,本文從三軸加速度、三軸角速度以及三軸姿態(tài)角等9個(gè)原始信號(hào)種提取了10種特征值,分別為平均合成加速度、合成加速度方差、合成加速度峰谷值、平均合成角速度、合成角速度方差、合成角速度峰谷值、合成加速度與合成角速度協(xié)方差、X軸姿態(tài)角變化量、Y軸姿態(tài)角變化量以及Z軸姿態(tài)角變化量。以下為10種特征值的定義與公式。
(2)

(3)
合成加速度峰谷值apv,一個(gè)動(dòng)作合成加速度信號(hào)的最大值與最小值之差,算式如下:
apv=Max(a)-Min(a)
(4)
(5)

(6)
合成角速度峰谷值ωpv,一個(gè)動(dòng)作合成角速度信號(hào)的最大值與最小值之差,算式如下:
ωpv=Max(ω)-Min(ω)
(7)
合成加速度與合成角速度協(xié)方差Cov(a,ω),算式如下。
(8)
X、Y、Z軸姿態(tài)角變化量Rx、Ry、Rz分別用式(9)至式(11)表示,其中φx,k、φy,k、φz,k為第k時(shí)刻采樣得到的X、Y、Z三軸姿態(tài)角信號(hào)。
(9)
(10)
(11)
本文對(duì)某專業(yè)運(yùn)動(dòng)員的7種運(yùn)動(dòng)進(jìn)行信號(hào)采集,并對(duì)各個(gè)動(dòng)作的特征值進(jìn)行分析,通過分析可得,這10種特征值在區(qū)分7種運(yùn)動(dòng)時(shí),都具有一定的貢獻(xiàn)。例如:圖9為平均合成角速度特征值的運(yùn)動(dòng)分布圖,該圖反應(yīng)了該運(yùn)動(dòng)員7種運(yùn)動(dòng)動(dòng)作平均合成角速度的分布狀況。觀察可得,該特征值下靜止分布在0~100之間,跑動(dòng)分布在100~200之間,乒乓球反手分布在300左右,這三個(gè)動(dòng)作的分布區(qū)間不與其他動(dòng)作區(qū)間沖突,因此該特征值對(duì)區(qū)分這三種動(dòng)作的貢獻(xiàn)較大。表1總結(jié)了各特征值可區(qū)分的運(yùn)動(dòng)類型,10種特征值可完全覆蓋7類運(yùn)動(dòng)類型,因此選取這10種特征值作為BP神經(jīng)網(wǎng)絡(luò)分類器的輸入較為合理。
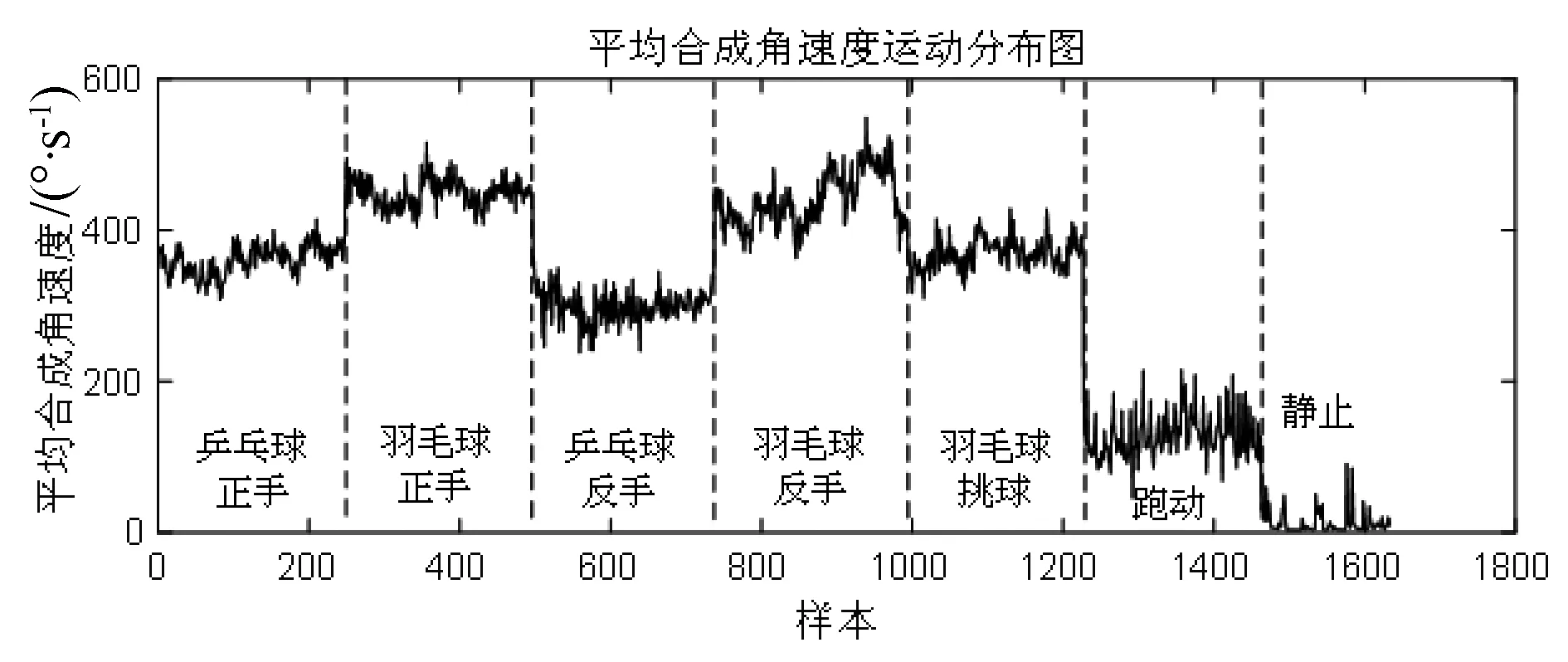
圖9 平均合成角速度運(yùn)動(dòng)分布圖
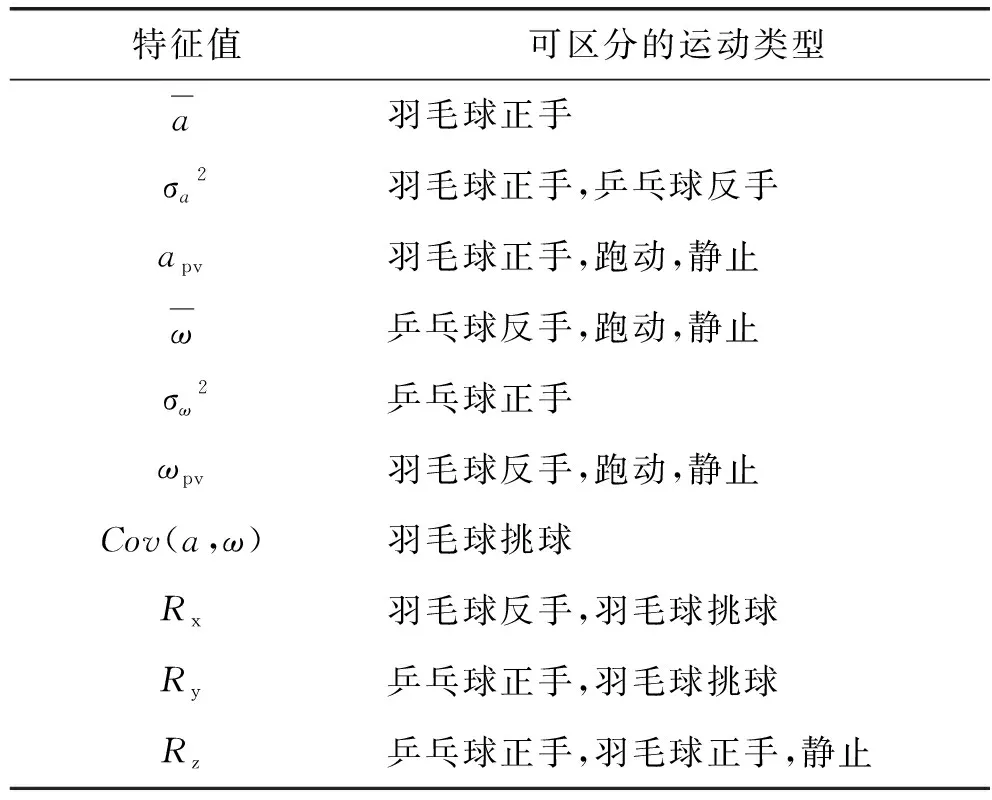
特征值可區(qū)分的運(yùn)動(dòng)類型a羽毛球正手σa2羽毛球正手,乒乓球反手apv羽毛球正手,跑動(dòng),靜止ω乒乓球反手,跑動(dòng),靜止σω2乒乓球正手ωpv羽毛球反手,跑動(dòng),靜止Cov(a,ω)羽毛球挑球Rx羽毛球反手,羽毛球挑球Ry乒乓球正手,羽毛球挑球Rz乒乓球正手,羽毛球正手,靜止
2.3 BP神經(jīng)網(wǎng)絡(luò)算法
神經(jīng)網(wǎng)絡(luò)在模式識(shí)別中應(yīng)用較廣泛,具有自學(xué)習(xí)、自適應(yīng)的能力和高速尋找優(yōu)化解的能力[12]。BP神經(jīng)網(wǎng)絡(luò)是一種多層前饋網(wǎng)絡(luò),其特點(diǎn)是信號(hào)向前傳播和誤差反向傳播,其結(jié)構(gòu)包括輸入層、隱含層以及輸出層[13]。圖10為一個(gè)四輸入三輸出的三層BP神經(jīng)網(wǎng)絡(luò)示意圖。
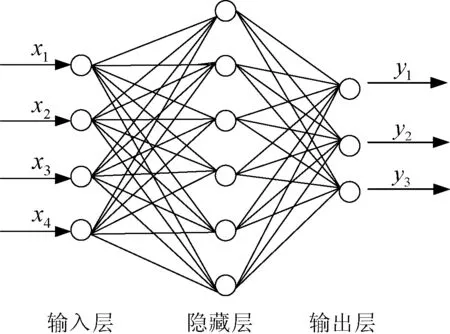
圖10 BP神經(jīng)網(wǎng)絡(luò)示意圖
本文采用采用BP神經(jīng)網(wǎng)絡(luò)作為分類器,以提取的10個(gè)特征值作為輸入,7種運(yùn)動(dòng)類型作為輸出,根據(jù)經(jīng)驗(yàn)式(12),選取隱藏層節(jié)點(diǎn)數(shù)為8。
(12)
式中:n為隱含層,m為輸入層數(shù),k為輸出層數(shù),a為1~10之間的調(diào)節(jié)常數(shù)。
本文在訓(xùn)練神經(jīng)網(wǎng)絡(luò)之前,采集了專業(yè)運(yùn)動(dòng)員的1 633組標(biāo)準(zhǔn)動(dòng)作的特征值作為樣本空間,包含了7種運(yùn)動(dòng)類型,其中70%作為訓(xùn)練樣本,15%作為驗(yàn)證樣本,15%作為測試樣本。經(jīng)過測試與調(diào)整,設(shè)定網(wǎng)絡(luò)目標(biāo)誤差為0.001,訓(xùn)練迭代次數(shù)為 20,學(xué)習(xí)速率為0.3。表2所示為BP神經(jīng)網(wǎng)絡(luò)產(chǎn)生的混合矩陣,表2中第一行與第一列數(shù)字的標(biāo)注如下:1代表乒乓球正手;2代表羽毛球正手;3代表乒乓球反手;4代表羽毛球反手;5代表羽毛球挑球;8代表走跑;10代表靜止。混合矩陣表明網(wǎng)絡(luò)的綜合準(zhǔn)確度達(dá)到97.5%,基本滿足識(shí)別精度要求。
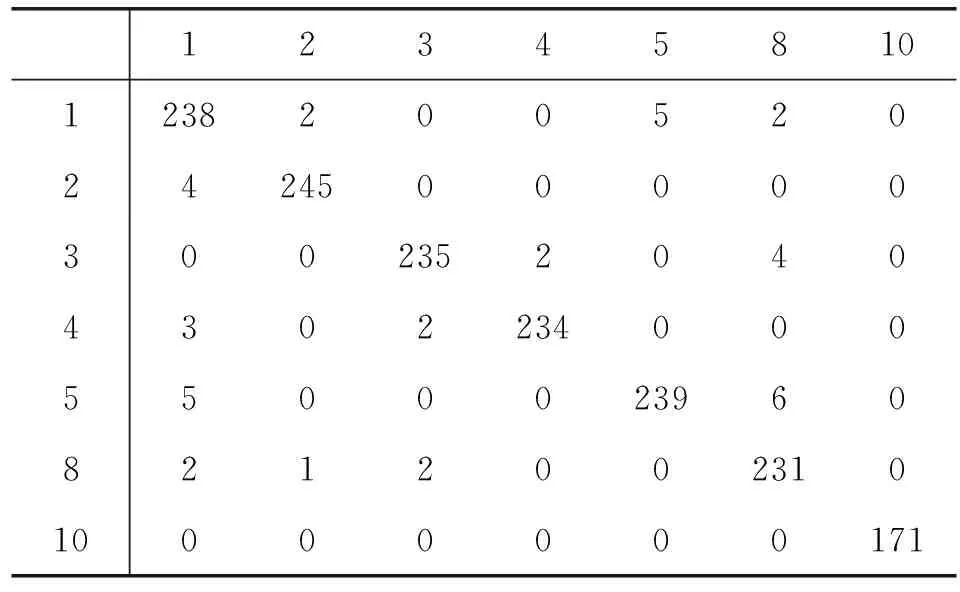
表2 BP神經(jīng)網(wǎng)絡(luò)混合矩陣
3 實(shí)驗(yàn)結(jié)果分析
本研究搭建了如圖11所示的MEMS人體信號(hào)采集裝置樣機(jī),將運(yùn)動(dòng)識(shí)別算法編寫入如圖12所示的PC端軟件中。軟件以20 s為周期實(shí)行運(yùn)動(dòng)識(shí)別算法,將20 s內(nèi)的運(yùn)動(dòng)員原始數(shù)據(jù)進(jìn)行動(dòng)作分割,并對(duì)各動(dòng)作進(jìn)行特征值提取,最后輸入已經(jīng)訓(xùn)練好的BP神經(jīng)網(wǎng)絡(luò)得到各動(dòng)作的識(shí)別結(jié)果,并對(duì)各運(yùn)動(dòng)類型進(jìn)行計(jì)數(shù)。軟件中間部分顯示了20 s內(nèi)各動(dòng)作的計(jì)次結(jié)果以及累計(jì)計(jì)次結(jié)果,軟件中指示的其他動(dòng)作代表靜止動(dòng)作。

圖11 MEMS人體信號(hào)采集裝置樣機(jī)
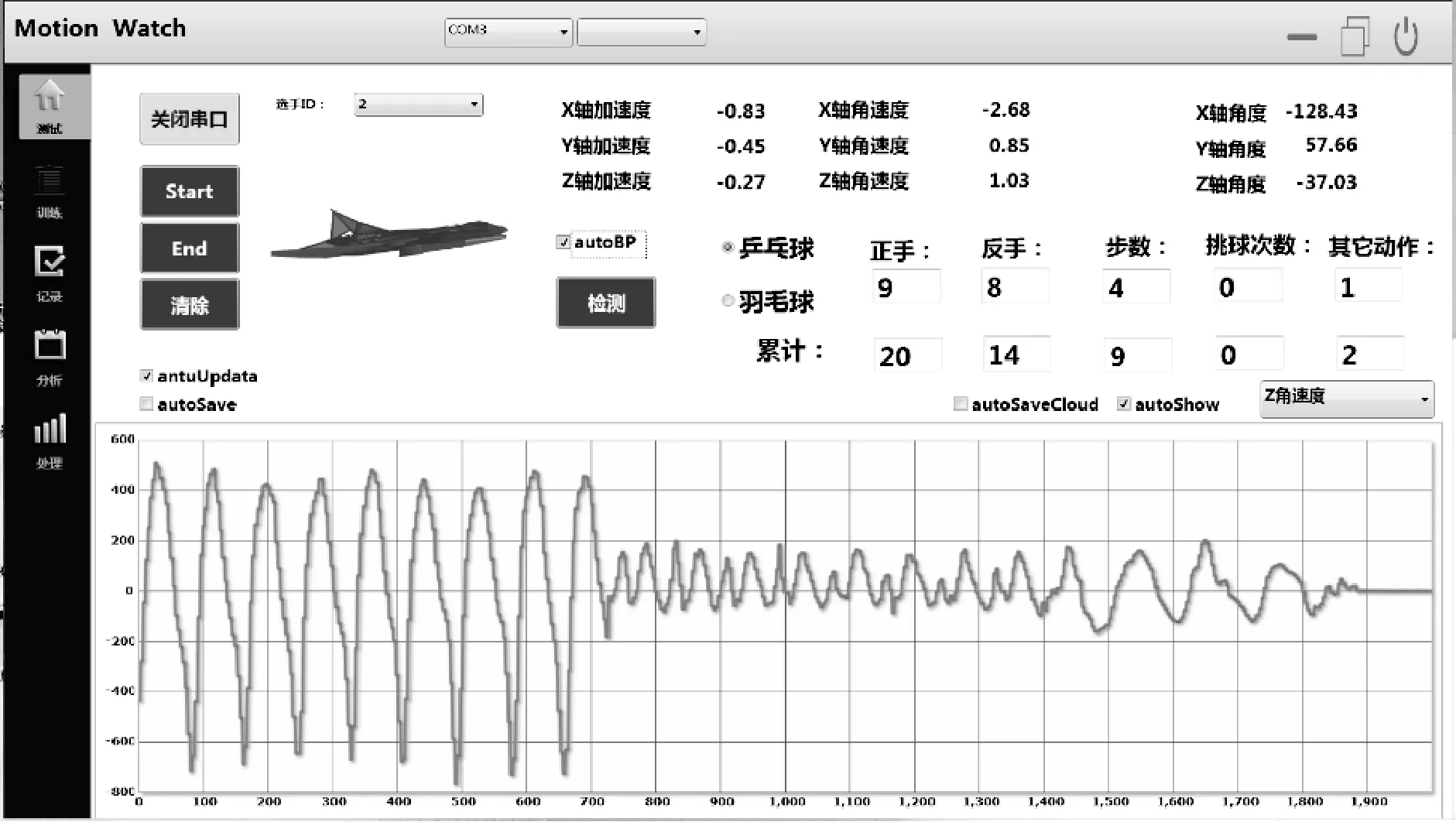
圖12 PC端軟件界面
圖13所示為運(yùn)動(dòng)員在實(shí)戰(zhàn)中20 s內(nèi)乒乓球運(yùn)動(dòng)的動(dòng)作分割與識(shí)別結(jié)果圖。通過該運(yùn)動(dòng)識(shí)別算法,不但準(zhǔn)確實(shí)現(xiàn)了動(dòng)作分割,也實(shí)現(xiàn)了運(yùn)動(dòng)類型的準(zhǔn)確識(shí)別,識(shí)別結(jié)果已在圖中標(biāo)出。1代表乒乓球正手,3代表乒乓球反手,6代表跑動(dòng),7代表靜止,該圖準(zhǔn)確反應(yīng)了運(yùn)動(dòng)員9次乒乓正手,8次乒乓反手,4次跑動(dòng),最后以靜止?fàn)顟B(tài)結(jié)束,與圖12軟件中對(duì)應(yīng)動(dòng)作計(jì)次情況一致。圖14為20 s內(nèi)羽毛球運(yùn)動(dòng)的動(dòng)作分割與識(shí)別結(jié)果圖,2代表羽毛球正手,4代表羽毛球反手,5代表羽毛球挑球,同樣準(zhǔn)確反應(yīng)了運(yùn)動(dòng)員10次羽毛球正手,8次羽毛球反手以及4次羽毛球挑球,同樣與現(xiàn)場實(shí)際情況基本一致。

圖13 乒乓球運(yùn)動(dòng)動(dòng)作分割與識(shí)別結(jié)果圖
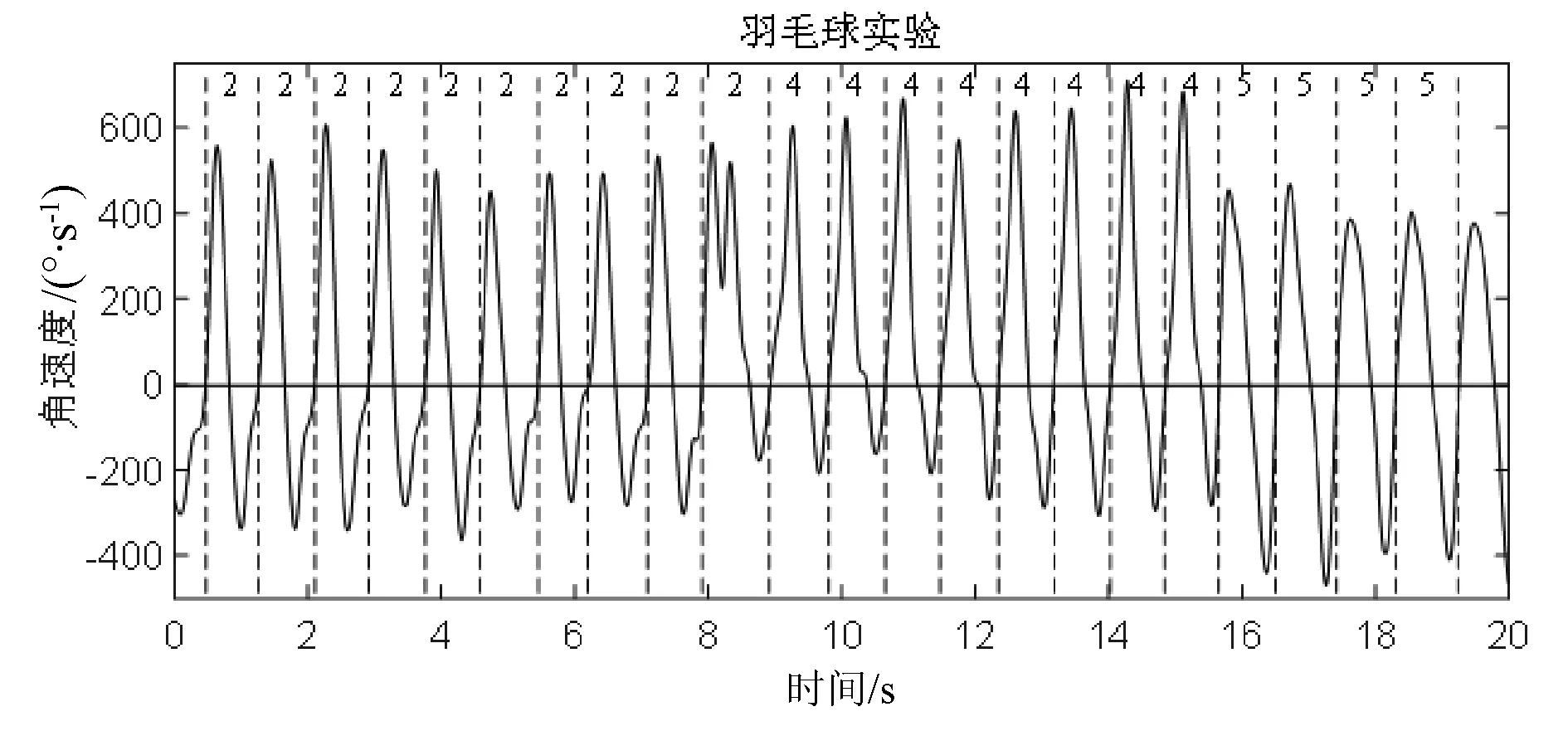
圖14 羽毛球運(yùn)動(dòng)動(dòng)作分割與識(shí)別結(jié)果圖
通過上述實(shí)驗(yàn),驗(yàn)證了本文運(yùn)動(dòng)識(shí)別算法的準(zhǔn)確性。通過上位機(jī)軟件的實(shí)施,體現(xiàn)了一定的實(shí)時(shí)性,可應(yīng)用于專業(yè)乒乓球運(yùn)動(dòng)員以及羽毛球運(yùn)動(dòng)員在比賽或訓(xùn)練中的連續(xù)動(dòng)作識(shí)別與計(jì)次。
4 結(jié) 語
本文提出的運(yùn)動(dòng)識(shí)別系統(tǒng),通過運(yùn)動(dòng)傳感器采集運(yùn)動(dòng)員持拍手臂的三軸加速度、三軸角速度以及三軸姿態(tài)角作為原始數(shù)據(jù);通過窗寬為5的平滑濾波算法對(duì)Z軸角速度進(jìn)行濾波,去除局部波峰波谷,提高了運(yùn)動(dòng)分割精度;通過尋找波峰波谷以及零點(diǎn)的方法獲得各個(gè)動(dòng)作的起點(diǎn)和終點(diǎn),并提取了一個(gè)動(dòng)作的10種特征值作為BP神經(jīng)網(wǎng)絡(luò)的輸入;通過一定數(shù)目的運(yùn)動(dòng)樣本來訓(xùn)練神經(jīng)網(wǎng)絡(luò),最終可實(shí)現(xiàn)乒乓球和羽毛球等7種運(yùn)動(dòng)類型的識(shí)別與計(jì)數(shù);通過實(shí)驗(yàn)驗(yàn)證,該運(yùn)動(dòng)識(shí)
別系統(tǒng)在運(yùn)功識(shí)別功能上具有一定的準(zhǔn)確性與實(shí)時(shí)性,并具有一定的使用價(jià)值。
猜你喜歡
幼兒智力世界(2022年3期)2022-03-12 15:52:26
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
幼兒100(2018年35期)2018-12-29 12:32:22
電子制作(2018年11期)2018-08-04 03:25:42
小學(xué)生作文(低年級(jí)適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學(xué)低年級(jí)(2017年4期)2017-06-09 16:22:28
作文評(píng)點(diǎn)報(bào)·低幼版(2017年7期)2017-03-11 20:49:41
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
小主人報(bào)(2016年2期)2016-02-28 20:46:35