基肥定深施用裝置排肥口位置與施肥深度關系模型
2018-08-10 07:13:20祝清震武廣偉安曉飛陳立平孟志軍趙春江
農業工程學報 2018年13期
關鍵詞:深度
祝清震,武廣偉,安曉飛,陳立平,孟志軍,趙春江※
?
基肥定深施用裝置排肥口位置與施肥深度關系模型
祝清震1,2,武廣偉2,安曉飛2,陳立平3,孟志軍3,趙春江1,2※
(1. 西北農林科技大學機械與電子工程學院,楊凌 712100;2. 北京農業信息技術研究中心,北京 100097;3. 北京農業智能裝備技術研究中心,北京 100097)
針對中國黃淮海地區冬小麥基肥施用過程中化肥無序投送造成的過量施用、利用率低的問題,結合現有的冬小麥旋耕施肥作業的農藝特點,該研究提出一種基于旋耕覆土的基肥定深條施投送方法。通過對旋耕刀、后拋土塊進行運動學分析,建立了基肥定深施用裝置排肥口位置與施肥深度關系模型,搭建了旋耕施肥試驗平臺,設計了2組遞進試驗,應用該平臺對建立的排肥口位置與施肥深度關系模型進行大田試驗驗證,在旋耕機構的結構參數和工作參數一定的情況下,根據建立的關系模型對排肥管的安裝位置進行依次調整,試驗設置80、100、120、140和160 mm共計5種肥料目標投送深度,然后對5種肥料目標投送深度下的肥料實際位置深度進行測量。試驗結果表明,肥料的實際位置深度均值與對應目標投送深度的偏差最大值為9 mm,偏移率最大值為8.75%,肥料的實際投送位置深度和目標投送深度基本吻合。該研究可以為中國黃淮海地區冬小麥基肥的精準定深實施及其相關聯合機具開發提供理論依據。
機械化;肥料;模型;基肥施用;定深施肥;數學建模;旋耕理論;精準農業
0 引 言
基肥施用是小麥生產中的一個重要環節,對小麥的產量影響較大[1-2]。在中國黃淮海地區冬小麥的基肥施用通常采用撒肥機或人工將化肥撒施在地表,然后依靠旋耕機將地表肥料與表層土壤充分混合,進行全層施用,或者依靠鏵式犁的翻垡效果將地表的肥料施入犁底 層[3-4]。這種先撒肥后旋耕或耕翻的基肥施用方法,造成化肥的無序投送,化肥利用率低的問題,過量肥料施用還會造成環境污染[5-6]。如何在保證小麥產量的基礎上,進行合理施肥是亟需解決的問題。
肥料的施用位置對作物的吸收和利用很重要[7-9],如果肥料與作物距離太遠,不易被作物吸收,造成肥料浪費,距離太近,容易造成燒種燒苗的問題。歐俊輝等研究了長期定位施肥對小麥產量和土壤養分的影響[10],張俊華等以定位施肥方式作為研究對象,建立了冬小麥和夏玉米的養分吸收預測模型[11],馬力等研究了定位施肥對作物產量穩定性的影響[12],楊旸等研究了定位施肥對肥料利用率的影響[13]。以上農藝研究表明將肥料準確施到農作物的根系合適部位,對提高化肥利用率,減少化肥施用量具有重要意義,現階段國內外學者對水稻、玉米等寬行株植作物的精準定位施用方法研究較多,左興健,陳雄飛等[14-15]開展了適用于水稻的側位深施肥方法研究;王慶杰等以東北春季玉米為研究對象,研發了并列組合式種肥分施裝置[16];薛少平等通過種肥間距試驗,對其中冬小麥種肥下位和側位最佳施用距離進行了深入研究,發現以肥料施于種子下側6 cm最好,或施于種子一側4~6 cm為宜[17];姚宗路等針對冬小麥定位施肥需求,對小麥免耕播種機種肥分施機構進行改進優化研 究[18]。定深施肥是定位施肥一種主要形式,現階段對冬小麥等密植窄行距農作物的基肥定深施用方法研究還比較欠缺,已有的研究多采用開溝器完成肥料的定深施用,這種肥料投送方式需要消耗較大的開溝阻力,另外開溝后土壤回填不及時,易造成肥料裸露,影響化肥的施用效率,開展適用于中國黃淮海地區的冬小麥基肥定深施用方法的創新研究十分必要。
本文針對中國黃淮海地區冬小麥基肥施用過程中化肥無序投送造成的過量施用、利用率低的問題,結合現有的冬小麥旋耕施肥作業的農藝特點,提出一種基肥定深條施投送方法,通過對旋耕刀和后拋土塊進行運動分析,建立了基肥定深施用裝置排肥口位置與施肥深度關系模型,能夠為基肥定深條施投送要求下排肥管的安裝位置參數提供理論指導,進而為冬小麥基肥的機械化精準施用裝備設計研發提供理論參考依據。
1 基肥定深條施投送方法
1.1 冬小麥基肥定深施用農藝及解決方法
為了有效提高肥料的利用率和防止肥料的揮發損失,同時避免化肥與種子直接接觸影響種子出苗率,以中國黃淮海地區的寬幅小麥播種模式為例,一般要求淺層肥料施用于小麥種子下方50 mm左右,深層肥料施用于種子下側130 mm左右,其基肥定深施用農藝要 求[19-21]如圖1所示。根據該農藝技術需求開展相關的基肥定深投送方式研究非常必要。

1. 深層肥料 2. 淺層肥料 3. 小麥種子 4. 土壤
近些年來一部分學者嘗試將旋耕拋土作業過程與播種、施肥和埋茬等相結合,如李永磊等設計了雙輥秸稈還田旋耕機[22],牛琪等開展了旋耕與小麥撒播方面的研究[23],吳波等應用旋耕機進行了保護性耕作條件下的中耕施肥方面的研究[24]。參考以上研究,本文提出了基于旋耕覆土的基肥定深條施投送方法,該方法是將肥料的定深條施作業過程與傳統的旋耕作業相結合,在旋耕刀向后拋土的過程,排肥裝置將肥料投送到目標深度耕層中,以達到肥料定深投送的技術效果。為了達到該技術效果,需要對旋耕刀、后拋土塊進行運動學分析,并對土塊回落旋耕溝底的狀態進行假設,以建立基肥定深施用裝置排肥口位置與施肥深度關系模型。
1.2 旋耕刀運動分析
傳統的旋耕刀切拋土壤過程如圖2所示。旋耕刀的運動軌跡為余擺線[23],對旋耕刀的端點進行運動分析,如圖3所示,端點的運動方程滿足式(1),其中=0時,端點位于軸上的0點處。
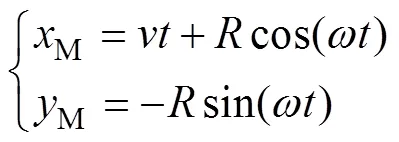
式中表示端點與刀軸旋轉中心點的距離,m;M、M分別表示端點在水平和垂直方向上的位移,m;表示機具前進速度,m/s;表示旋耕刀作業的時間,s;表示旋耕刀的角速度,rad/s;表示旋耕刀在時間內轉過的角度,rad。
對式(1)的時間進行求導數,可以得到任意時刻,端點在軸和軸方向上的速度方程式(2)。

注:v表示機具的前進速度,m·s-1;ω表示旋耕刀繞刀軸中心旋轉的角速度,rad·s-1。
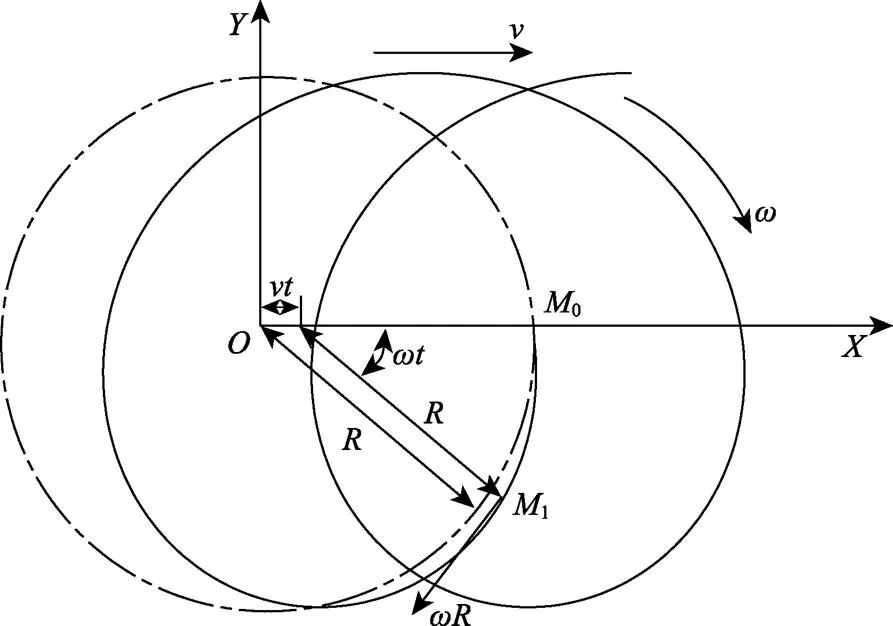
注:X-O-Y為絕對坐標系,O為坐標系的原點,位于起始位置的旋耕刀軸旋轉中心;R為旋耕刀的旋轉半徑,m;M0點為旋耕刀端點啟動位置,M1點為時間t時旋耕刀端點的位置;vt表示時間t時刀軸前進位移,m;ωt表示時間t時旋耕刀轉過的角度,rad。

式中Mx、My分別表示旋耕刀端點的線速度在軸和軸方向上的分量,m/s。
對式(2)進行整理,可以得到旋耕刀上端點的絕對速度,如式(3)所示。

1.3 后拋土塊運動分析
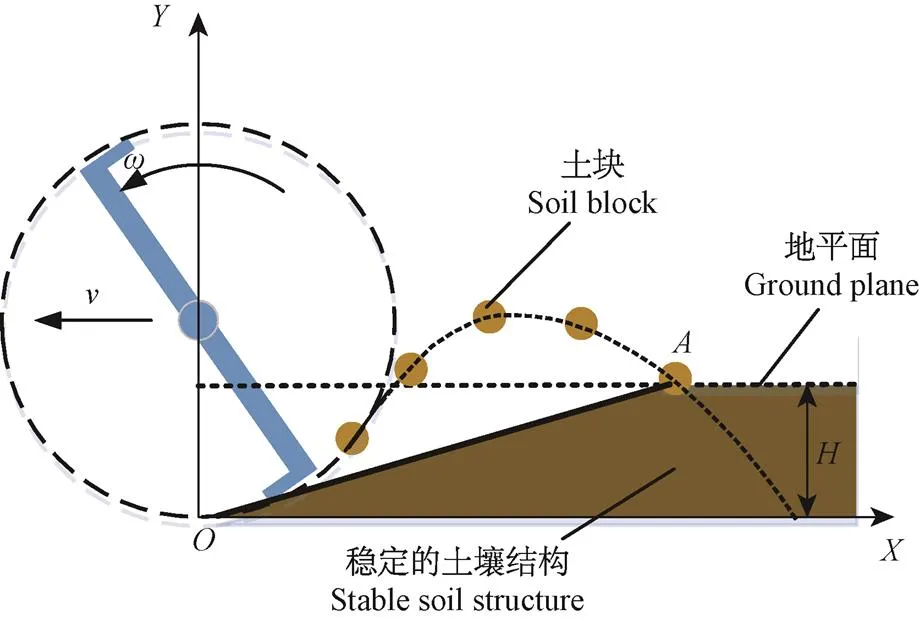
被旋耕刀切下的土塊,首先會隨旋耕刀向后運動,并在某一瞬間脫離旋耕刀的約束,假設將旋耕機后端的拖板拆除,在不考慮土塊之間的碰撞以及空氣阻力的情況下,被旋耕刀后拋的土塊可以看作一個質點,理論上它將做斜上拋運動,如圖4所示。
以土塊在旋耕刀端點處脫離為例,對土塊進行運動分析。土塊在脫離旋耕刀的端點的瞬間,在理論上,土塊此時的絕對速度應該和旋耕刀上端點的絕對速度一致。設旋耕刀的端點旋轉到點¢時,土塊剛好脫離旋耕刀的約束,此時在'點,土塊的絕對速度T的可用(4)式表示。

注:h表示土塊脫離旋耕刀時距旋耕溝底的垂直高度,m;H表示旋耕作業深度,m;O¢表示土塊脫離旋耕刀約束的空間位置;O2表示刀軸旋轉中心;θ表示土塊拋出點O¢與旋耕刀旋轉中心O''連線和水平面的夾角,rad;φ表示土塊的拋射角,rad;vT為土塊的絕對速度,m·s-1;vTx為vT在X軸方向的分量,m·s-1;vTy為vT在Y軸方向的分量,m·s-1。

式中表示土塊脫離旋耕刀端點處與旋耕溝底的垂直距離,m;表示土塊拋出點與旋耕刀旋轉中心連線和水平面的夾角,rad。
將土塊的絕對速度分別投影軸和軸上,可以將式(4)轉化為式(5)。
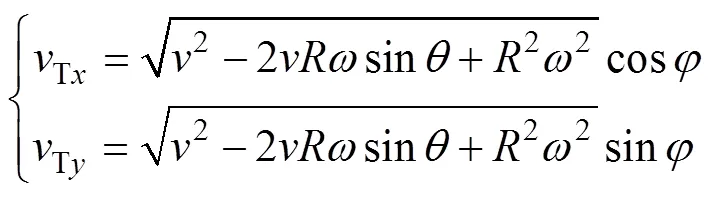
式中Tx、Ty分別表示土塊在水平和垂直方向上的分速度,m/s;表示土塊的拋射角,rad,其中tan=Ty/Tx。
以土塊從¢點開始做斜上拋的自由落體運動,其運動軌跡應該滿足式(6),其中土塊的起拋點¢的坐標為(cos,)。

式中T、T分別表示土塊在絕對坐標系中的水平和垂直方向的位移,m;表示重力加速度,m/s2,本文= ?9.8 m/s2。
將(6)式進行整理,可以得到土塊的運動軌跡方程,其軌跡方程,如式(7)所示。

式中T′、T′分別表示土塊在局部坐標系中的水平和垂直方向的位移,m。
由式(7)可知,土塊的運動軌跡為拋物線,當土塊回落到地平面時,即=,帶入式(7),可以得到對應的值,鑒于該土塊的運動軌跡與地平面有2個交點,應該有2個值,分別用式(8)和式(9)表示。

土塊再次回落地面時,即是該土塊的最遠后拋距離,設該點為,其橫坐標值應該取T2,坐標為(T2,),通過帶入不同的旋耕作業參數,可以得到土塊的最遠后拋距離。
參考文獻[25],當土塊的拋出角為π/4時,即Ty=Tx時,土塊的拋出距離最遠。結合實際旋耕作業參數和相關文獻[26-27],以旋耕刀轉速180 r/min,旋耕深度0.2 m,前進速度1.5 m/s為例,將這些旋耕作業參數帶入式(9),則土塊拋出的距離最遠距離為1.2 m,該值與文獻[26-27]的試驗和仿真研究結果基本一致。
1.4 肥料精準定深投送方法建模
旋耕刀在將土塊被向后拋出后的同時,旋耕機會繼續向前運動,使旋耕刀切下的土塊從溝底持續向后拋出,依次對旋耕刀旋切過的溝底進行覆蓋,假設旋耕機勻速前進,點作為土塊后拋的最遠距離,在某一瞬間,土塊回填落溝底后的穩定狀態應該呈現一個斜面,斜面的下端位于旋耕溝底,上端位于地平面,該斜面與鉛垂面的交線,理論上應該過圖5中點和點,其中點坐標(T2,),點為坐標原點,本研究在這里做這樣一個假設,過兩點的交線為一條直線,即在直線之下的土壤是穩定狀態,直線之上的土壤處于下落的運動狀態,則在圖5建立的坐標系中,其過、兩點直線的方程可以用式(10)表示。

式中、表示直線上任意一點的橫、縱坐標值,m;表示直線的斜率。若土壤的堆積角大于等于∠AOX,位于直線下側的土壤是穩定狀態,此時斜率等于/T2;若土壤的堆積角小于∠AOX,此時斜率為土壤堆積角的正切值。
基于以上假設的前提下,如圖6所示,在旋耕刀軸后端安裝固定排肥管,排肥管跟隨旋耕機構向前運動,同時,排肥管下端的排肥口將肥料排出。對排肥管的排肥口空間位置參數與肥料實際投送深度進行分析,當肥料目標投送深度1一定的情況下,排肥口空間位置參數相對于直線有3種可能的情況:
1)當排肥口1位于直線上側時,此時排肥口1的坐標為(1,-1),排肥口1排出肥料,由于肥料下側沒有穩定的土壤斜面結構支撐,肥料會繼續下落,直到落到線所在穩定土壤斜面為止,這種狀態下,排肥口排出的肥料雖然也能夠被后拋的土壤覆蓋,但是實際的肥料投送深度3會大于設置的目標投送深度1,即31;
注:A表示土塊最遠拋出點。
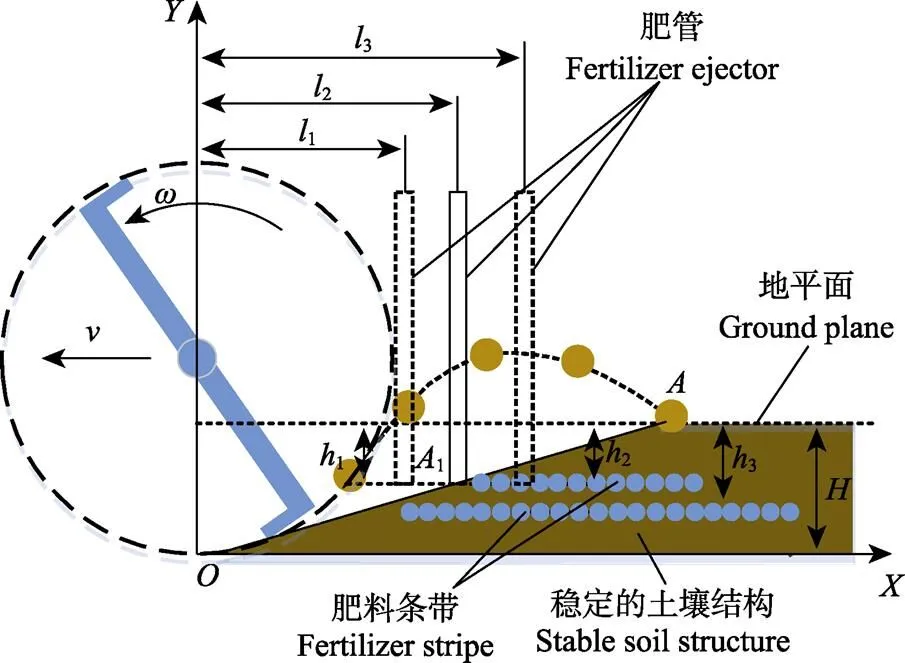
注:h1表示肥料目標施用深度,m;A1表示排肥口的空間位置;l1表示排肥口A1位于直線AO上側時,排肥管與刀軸旋轉中心的水平間距,m;l2表示排肥口A1位于直線AO上時,排肥管與刀軸旋轉中心的水平間距,m;l3表示排肥口A1位于直線AO下側時,排肥管與刀軸旋轉中心的水平間距,m;h2表示排肥口A1位于直線AO下側或上時,肥料實際投送深度,m;h3排肥口A1位于直線AO上側時,肥料實際投送深度,m。
2)當排肥口1位于直線下側時,此時排肥口1的坐標為(3,-1),此時的排肥口1四周被已經回落到溝底的穩定土壤結構包圍,排出的肥料直接與穩定土壤結構接觸,實際肥料投送深度為2,與目標投送深度1一致,及2=1,但是會對肥料的順利排出造成影響,另外一方面,排肥管必須承受開溝和壅土的作業阻力,增加施肥作業的功耗;
3)當排肥口1位于直線上時,此時排肥口1的坐標為(2,-1),排出的肥料直接落在直線所在的穩定土壤斜面上,并立即被后拋的土壤覆蓋,在這種狀況下,肥料的實際投送深度為2,與目標投送深度1一致,即2=1,另外排肥管沒有開溝和壅土阻力,作業功耗理論上最佳。
通過對排肥口1與直線的相對位置關系的分析可知,為了達到肥料的定深投送技術效果,排肥管的排肥口1坐標(2,-1)必須滿足式(11)。
式中1表示肥料目標施用深度,m;2表示排肥口1位于直線上時,排肥管與刀軸旋轉中心的水平間距,m。
由式(11)可知,當肥料的目標投送深度1一定的狀況下,排肥口1與旋耕刀軸中心的水平距離,與直線的斜率/2有關,這里/2的值與旋耕刀的結構和工作參數有關。式(11)即是所要建立的基肥定深施用裝置排肥口位置與施肥深度關系模型,基于旋耕覆土的基肥定深條施投送方法設想也是根據式(11)提出的。
2 平臺搭建及驗證試驗
2.1 試驗平臺搭建
為了驗證提出的基肥定深施用裝置排肥口位置與施肥深度關系模型,以及檢驗所提旋耕覆土的基肥定深條施投送方法設想,搭建了旋耕施肥試驗平臺,如圖7a所示,主要由拖拉機、機架、限深機構、旋耕機構、排肥裝置、精準排肥控制系統、鎮壓機構等組成。其中機架前端通過三點懸掛與拖拉機連接,旋耕機構的動力輸入軸通過萬向伸縮傳動軸與拖拉機的動力后輸出軸連接,機架上從前往后依次安裝布置限深機構、旋耕機構、排肥裝置和鎮壓機構,其中精準排肥控制系統位于排肥裝置上端一側。
試驗平臺的工作原理是拖拉機通過3點懸掛架平穩帶動后端的旋耕機構、排肥裝置和鎮壓機構等勻速前進,并可以通過萬向可伸縮傳動軸穩定驅動旋耕刀轉動,進行切拋土垡,排肥裝置可以根據試驗要求,對其空間位置進行調整,并隨旋耕機構向前運動,限深機構和鎮壓機構相互配合可以用于調節旋耕機構的旋耕作業深度,旋耕機構配備可變速齒輪傳動箱,可以對旋耕刀的轉速進行調整,拖拉機配備自動導航駕駛系統,可以對試驗平臺的行駛方向進行穩定控制,并可以準確記錄拖拉機的前進速度。
排肥裝置作為試驗平臺的關鍵組件,其縱向和橫向調整方法如7b圖所示,主要由排肥管、套筒、緊固螺栓、U型螺栓和縱向梁組成,通過套筒側壁上的緊固螺栓可以對排肥管進行固定,通過U型螺栓可以將套筒固定在縱向梁上,縱向梁的兩端固定在機架的橫梁上。通過調節排肥裝置的U型螺栓,使套管可以在縱向梁上前后移動,進而可以到達調節排肥管與旋耕機構刀軸旋轉中心水平距離的目的,通過調節緊固螺栓,可以使排肥管在套筒內上下移動,進而可以到達調節排肥管下端排肥口作業深度的目的。

1. 拖拉機;2. 限深機構;3. 旋耕機構;4. 排肥裝置;5. 精準排肥控制系統;6. 鎮壓機構;7. 機架后梁;8. 縱向梁;9. 緊固螺栓;10. 排肥管;11. U型螺栓;12. 套筒;13. 機架中部橫梁;14. 旋耕機刀軸。
1. Tractor; 2. Depth-controlled component; 3. Rotary tillage device; 4. Fertilizer ejecting device; 5. Precision fertilization control system; 6 Press device; 7. Back beam of frame; 8. Longitudinal beam; 9. Fastening bolt; 10. Steel pipe of fertilizer ejecting; 11. U-shaped bolt; 12. Sleeve; 13. Middle beam of frame; 14. Knife roll.
注:1表示排肥口與縱向量的垂直高度,m。
Note:1is the vertical height between fertilizer outlet orifice of steel pipe and the longitudinal beam, m.
圖7 旋耕施肥試驗平臺
Fig.7 Test platform for rotary tillage and fertilization
2.2 驗證試驗
2.2.1 試驗地點
應用搭建的旋耕施肥試驗平臺,于2017年10月在北京市昌平區小湯山國家精準農業研究示范基地(北緯40°10¢,東經116°26¢)的試驗田進行肥料定深條施投送方法的驗證試驗,試驗田前茬作物為玉米。試驗區域的土壤為黃黏土,采用五點取樣法,應用土壤緊實度儀(浙江托普儀器有限公司,TJSD-750-IV型號)和土壤水分及溫度測試儀(德國STEPS,MST-3000+型號)和堆積角測量裝置對試驗區域的各層土壤的緊實度、濕度和溫度條件和堆積角進行測試記錄,試驗數據如表1所示。

表1 試驗田條件 Table 1 Experiment conditions
2.2.2 試驗材料
傳統的化肥顆粒一旦施入土壤中,如何再次將施入土壤中的化肥顆粒進行回收和投送深度測量是從事肥料的定深條施投送驗證試驗的難點,本文在參考文獻[28]的基礎上,以肥料粒徑大小、肥料包衣顏色與試驗區域黃黏土顏色差別大小作為篩選條件,最終選用中化山東肥業有限公司生產的藍精靈復合肥(藍色)作為試驗平臺的排施對象,使用游標卡尺(桂林廣陸數字測控股份有限公司,K15G278418數顯卡尺)對該化肥顆粒的三維尺寸進行測量,參照文獻[29-30]對其等效直徑和球形率進行計算,肥料顆粒的長度、寬度、高度平均值及等效直徑分別為3.09、3.06、2.58和2.90 mm,球形率為93.86%。
2.2.3 試驗設計
根據上文對肥料精準定深條施投送方法的分析可知,當旋耕機構的結構參數和工作參數一定時,設置肥料的目標投送深度,由式(11),可以得到理論的排肥管排肥口與旋耕刀軸的水平位置參數,進而可以得到排肥管的空間布置參數。本研究通過測試肥料的實際投送深度與目標投送深度的偏移值和偏移率,對提出的肥料定深條施投送方法進行驗證,其中旋耕機構的結構參數和工作參數主要包括旋耕刀軸的轉速、旋耕刀的旋轉半徑、試驗平臺的行進速度、旋耕作業深度和土壤脫離旋耕刀垂直位置等。對相關的試驗參數進行如下設置:選取國標IT245型旋耕刀作為試驗旋耕刀具,采用雙螺旋線排列安裝在旋轉刀軸上,旋耕刀繞刀軸旋轉的外圓周半徑為250 mm;選用約翰迪爾1204型拖拉機作為動力牽引機構,經過測試,選擇約翰迪爾1204拖拉機的中速1檔,發動機的轉速為1 500 r/min時,可以保證試驗平臺穩定在1.5 m/s的速度勻速前進,同時其動力后輸出軸可以穩定輸出405 r/min的轉速,通過調節旋耕機構的變速齒輪箱的傳動比,使旋耕刀的作業轉速保持在180 r/min;通過調節限深機構的限深輪離地高度進行控制旋耕刀的作業深度,本試驗選擇控制旋耕作業深度為200 mm。由式(9)可知,土塊在距離旋耕作業溝底垂直高度38mm時,后拋距離最遠。為了準確驗證建立的基肥定深施用裝置排肥口位置與施肥深度關系模型,設計2組遞進試驗,詳細試驗方法如下。
試驗1:分別選取目標施肥深度為80、100、120、140和160 mm的5種狀況進行試驗,根據式(11),計算對應肥料目標投送深度下,排肥口與刀軸旋轉中心的理論水平距離,分別為723、603、482、362和241 mm,通過調節排肥裝置的緊固螺栓,使排肥管下端排肥口位置依次滿足以上5種狀況,然后進行肥料的定深條施投送試驗,如圖8a所示,作業過程應用自動導航駕駛系統,使約翰迪爾拖拉機以1.5 m/s的速度勻速前進50 m,旋耕施肥作業完畢后,為了減少試驗誤差,舍去地頭和地尾10 m長度區域,選取中間30 m區域,每隔5 m取1個測試點,共計5個測試點,如圖8b所示,對施入耕層中肥料條帶的最低點和最高點的覆土厚度進行測試,取最高點和最低點的平均值作為肥料的實際投送深度。
試驗2:為了進一步驗證建立的基肥定深施用裝置排肥口位置與施肥深度關系模型,選取目標施肥深度120 mm進行試驗,此時排肥管的排肥口與刀軸旋轉中心的理論水平距離為482 mm,以50 mm為間隔,設置排肥管的排肥口與刀軸旋轉中心的水平距離為332、382、432、482、532、582和632 mm的7種狀況,對排肥管的排肥口與刀軸旋轉中心的水平距離進行調整,然后進行肥料定深條施投送作業,對作業后的肥料條帶深度進行測量,試驗操作過程和肥料投送深度數據獲取方法,與試驗1相同,如圖8所示。

圖8 田間施肥試驗
2.3 結果與分析
應用Origin數據處理軟件,對試驗1所獲取的試驗數據進行處理,將對應肥料目標投送深度下測得的5組數據進行整理,按式(12)計算每組試驗的肥料條帶的深度平均值、標準偏差、偏移差和偏移率,相關數據結果如表2所示,然后定義肥料目標投送深度為軸,實際肥料投送深度的均值為軸,并為實際肥料投送深度的均值添加標準偏差值,數據處理結果繪制成如圖9a所示散點圖,并在圖中添加一條直線=。
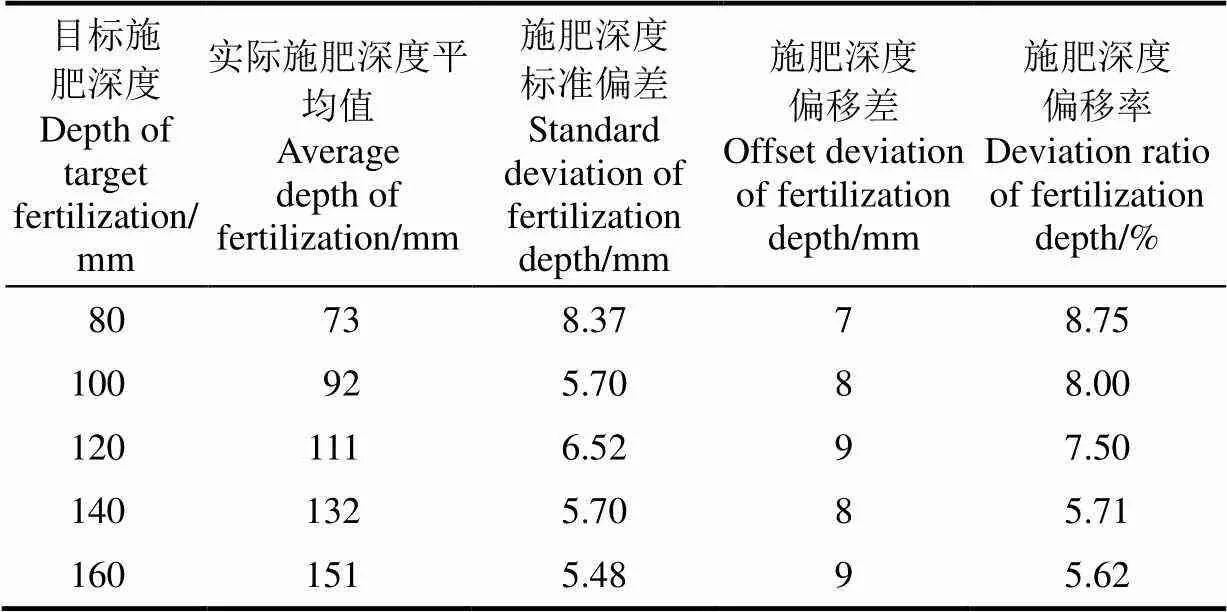
表2 試驗1施肥深度測定統計結果 Table 2 Statistical results of fertilization depth at experiment 1

由圖9a可知,實際肥料投送深度均值都小于對應目標投送深度,其中實際肥料投送深度均值的上偏差接近直線=;從表2中可知,其中肥料投送深度標準偏差最大值為8.37 mm,偏移差最大值為9 mm,偏移率最大值為8.75%。結合上文對排肥口空間位置參數與肥料目標投送深度3種狀況的分析,試驗1的數據結果表明,5種排肥口空間位置參數設置下的肥料實際投送深度與對應目標投送深度基本一致,此時排肥口的空間位置應該在圖6中所示直線上,或直線下側。
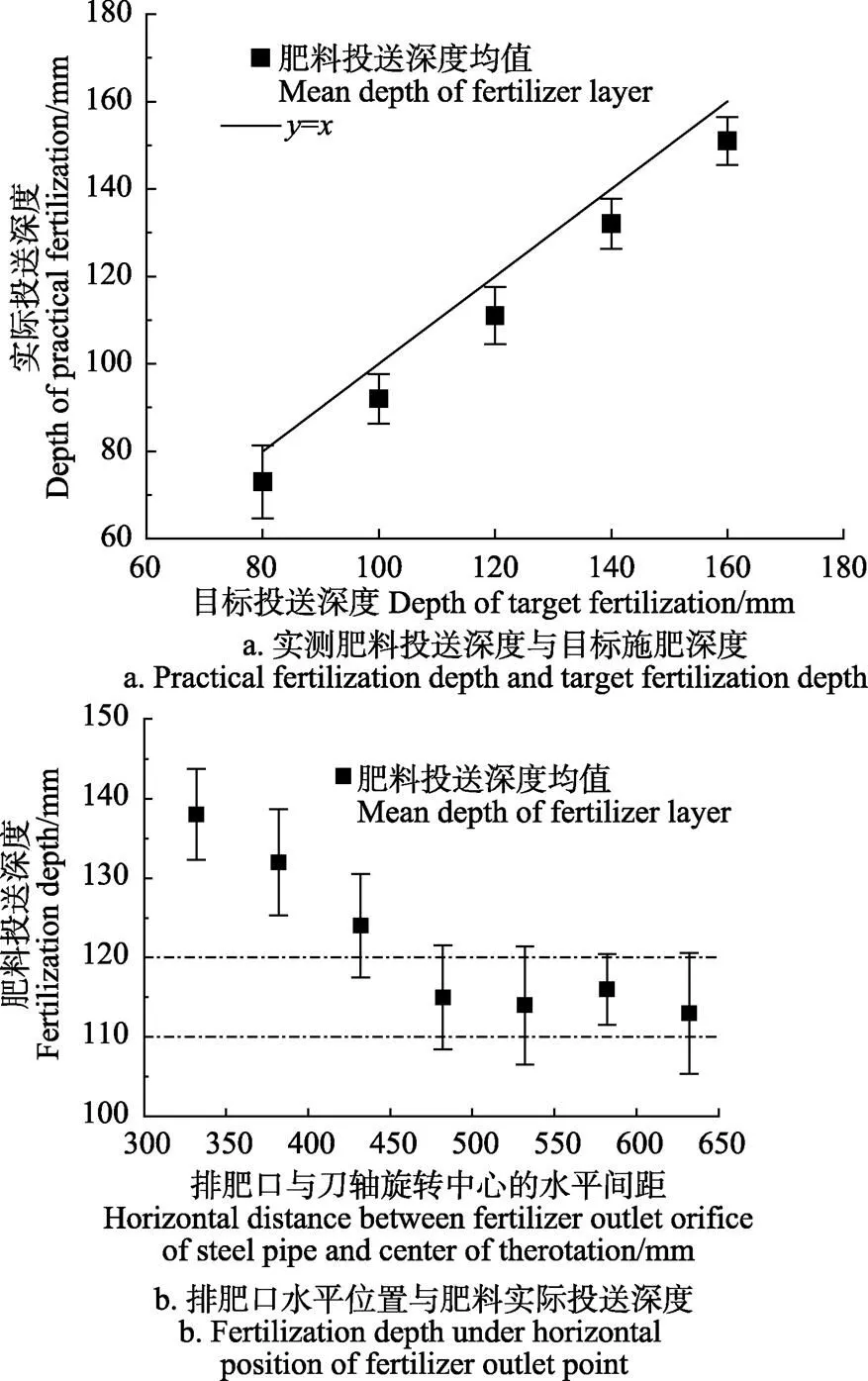
圖9 2組試驗的肥料實際投送深度
為了進一步檢驗排肥口的空間位置是否在直線上,繼續應用Origin數據處理軟件,對試驗2測試的35組肥料實際投送深度數據進行整理,參見式(12)計算肥料投送深度的平均值、標準偏差、偏移差和偏移率,相關數據處理結果如表3所示,定義排肥口與刀軸旋轉中心的水平距離為軸,肥料投送深度為軸,并為肥料實際投送深度的均值添加標準偏差值,數據結果繪制成如圖9b所示的散點圖。在圖9b中添加=110和=120兩條水平點劃線,分別作為肥料實際投送深度為110和120 mm的相對位置。
雖然試驗2中7組試驗的肥料目標投送深度都為120 mm,但是由圖9b可知,隨著排肥口與刀軸的水平間距逐漸增大,實際的施肥深度呈現逐漸降低的趨勢,當水平間距大于482 mm時,實際肥料的投送深度平均值變化趨于平穩,當排肥口與刀軸的水平間距分別為482、532、582和632 mm時,肥料實際投送深度均值基本穩定在110和120 mm之間;排肥口與刀軸的水平間距為332、382和432 mm時,肥料實際投送深度均值大于 120 mm。由表3可知,排肥口與刀軸的水平間距分別為432、482、532、582和632 mm時,肥料投送深度的偏移差最大值為7mm,偏移率最大值為5.83%;排肥口與刀軸的水平間距為332和382 mm時,偏移差最小值為12 mm,偏移率最小值為10%。結合上文對排肥口空間位置與肥料目標目標深度之間3種狀態的分析,可以認為排肥口與刀軸的水平間距大于等于482 mm時,肥料的實際投送深度穩定,即排肥口排出的肥料可以直接被下端和四周的穩定土壤結構支撐,這反映到圖9b中,即表現為實際測得肥料位置深度趨于穩定,肥料位置深度保持在110和120 mm范圍內;當排肥口與刀軸的水平間距小于等于432 mm時,排肥口排出的肥料下端和四周沒有穩定的土壤結構支撐,會繼續下落,直到遇到穩定的土壤結構為止,這反映在圖9b中,即表現為實際的肥料位置深度均值大于120 mm。將試驗2的數據分析結果與試驗1的數據分析結果進行結合,肥料目標投送深度為 120 mm,排肥口與刀軸水平間距為482 mm時,排肥口的空間位置應該在圖6中直線之上,而非直線下側。
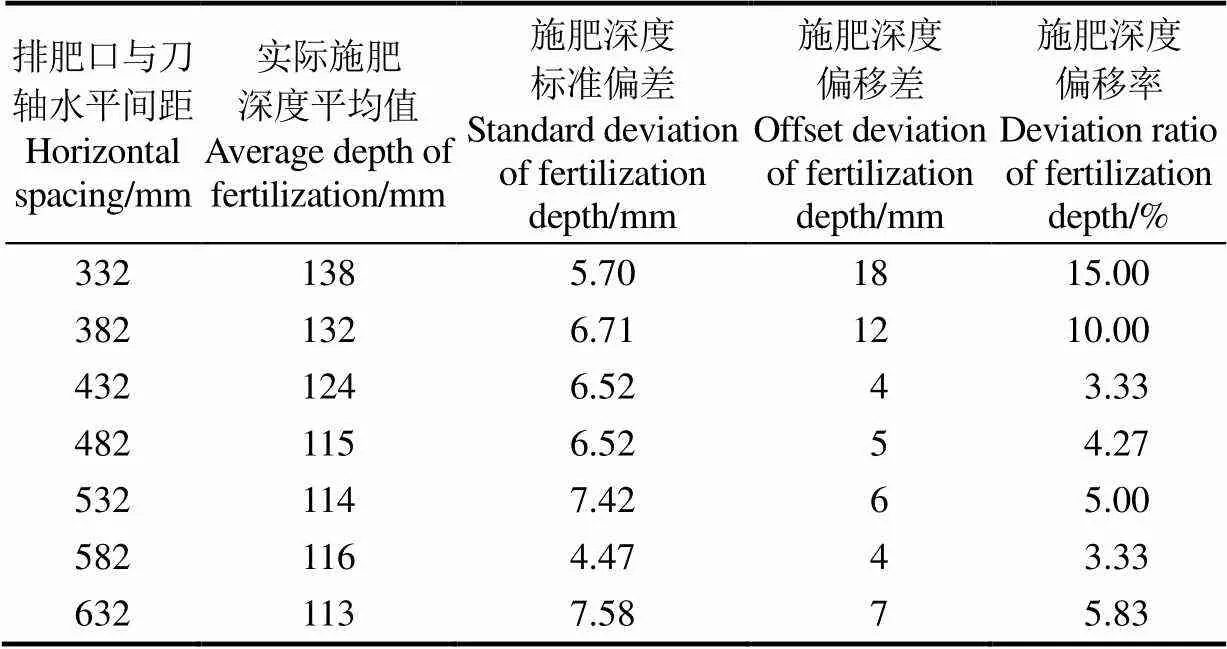
表3 試驗2施肥深度測定統計結果 Table 3 Statistical results of fertilization depth at experiment 2
2.4 討論
在圖9a中添加直線=,可以發現實際測得肥料位置深度均值都在直線=之下,其中實際肥料投送深度的偏移差最大值為9 mm,偏移率最大值為8.75%;在圖9b中,排肥口與刀軸旋轉中心水平距離分別為482、532、582和632 mm的4種狀況時,實際的肥料位置深度均值都小于120 mm,深度偏移差最大值為7 mm,偏移率最大為5.83%。出現以上2種狀況的原因應該與提出肥料定深條施投送方法、基肥定深施用裝置排肥口位置與施肥深度關系模型過程中的假設條件有關,在實際作業過程中,被拋起土塊的運動軌跡會受到空氣阻力和土塊之間的相互碰撞干擾,并非嚴格意義上的拋物線,文獻[31]中對拋土軌跡進行研究,理論拋土軌跡略高于實際的拋土軌跡,其中實際拋土距離也小于理論拋土距離。
此外,本研究在進行基肥定深施用裝置排肥口位置與施肥深度關系模型的驗證環節,沒有充分考慮土壤的物理參數對土塊運動軌跡的影響,文獻[32-33]對不同含水率、緊實度等參數下的土壤擾動與機具的作用關系進行研究,其中土壤含水率對旋耕作業效果具有重要影響。鑒于土壤的物理參數對土壤的運動過程具有重要影響,為了進一步完善和修正建立的基肥定深施用裝置排肥口位置與施肥深度關系模型,后期會開展與土壤物理參數相關的肥料定深條施投送方法研究。
在應用試驗1和試驗2的遞進試驗,進行基肥定深施用裝置排肥口位置與施肥深度關系模型驗證環節中,盡管受假設條件和實際土壤環境的影響,實際的肥料投送深度與對應目標投送深度存在一定偏移差和偏移率,但是肥料的位置深度均值的偏移率都控制在10%以內,本文所建立的基肥定深施用裝置排肥口位置與施肥深度關系模型,能夠為基肥定深條施投送要求下排肥管的安裝位置參數選取提供理論依據,提出的肥料定深條施投送方法能夠實現冬小麥基肥的不同施用深度要求的精準投送。
3 結 論
1)通過對旋耕刀和后拋土塊進行運動學分析,建立了基肥定深施用裝置排肥口位置與施肥深度關系模型,基于該關系模型提出了基肥定深條施投送方法,當目標施肥深度一定時,排肥口的空間位置參數與旋耕刀的結構和工作參數有關。
2)搭建了旋耕施肥試驗平臺,對提出的基肥定深條施投送方法和建立的基肥定深施用裝置排肥口位置與施肥深度關系模型進行大田試驗驗證,試驗數據結果顯示,肥料投送位置深度偏移差最大值為9mm,偏移率最大值為8.75%,肥料的實際投送深度和目標投送深度基本吻合,能夠實現冬小麥基肥的不同施用深度要求的精準投送。
[1] Judith Nyiraneza, Athyna N, Cambouris, Noura Ziadi, et al. Spring wheat yield and quality related to soil texture and nitrogen fertilization[J]. Agronomy Journal, 2012, 104(3): 589-599.
[2] 曾希柏,李菊梅. 中國不同地區化肥施用及其對糧食生產的影響[J]. 中國農業科學,2004,37(3):387-392. Zeng Xibai, Li Jumei. Fertilizer application and its effect on grain production in different counties of China[J]. Scientia Agricultura Sinica, 2004, 37(3): 387-392. (in Chinese with English abstract)
[3] 曾希柏,胡學玉,胡清秀. 我國肥料的施用現狀及發展趨勢[J]. 科技導報,2002,(8):36-39. Zeng Xibai, Hu Xueyu, Hu Qingxiu. Present state on China's fertilizer application and its development[J]. Science & Technology Review, 2002, (8): 36-39. (in Chinese with English abstract)
[4] 張小麗,張晉國,李江國,等. 雙層施肥旋耕播種機的設計[J]. 農業機械學報,2006,37(11):49-51. Zhang Xiaoli, Zhang Jinguo, Li Jiangguo, et al. Design of rotary tillage planter with double-deck fertilizer[J]. Transactions of The Chinese Society of Agricultural Machinery, 2006, 37(11): 49-51. (in Chinese with English abstract)
[5] 孫麗梅,李季,董章杭. 冬小麥-夏玉米輪作系統化肥農藥投入調查研究[J]. 農業環境科學學報,2005,24(5): 935-939. Sun Limei, Li Ji, Dong Zhanghang. Agrochemical input in winter wheat-summer maize system in Huantai County Shandong Province[J]. Journal of Agro-Environment Science, 2005, 24(5): 935-939. (in Chinese with English abstract)
[6] 楊莉琳,賈良良,胡春勝,等. 太行山山前平原冬小麥-夏玉米推薦施肥指標的修正[J]. 農業工程學報,2007,23(11):89-94. Yang Lilin, Jia Liangliang, Hu Chunsheng, et al. Revision of fertilizer recommendation for wheat and maize rotation in Taihang piedmont of North China[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2007, 23(11): 89-94. (in Chinese with English abstract)
[7] 歐俊輝,張海. 長期定位施肥對小麥產量及土壤肥力的變化研究[J]. 中國農業文摘-農業工程,2017,29(4):18-20. Ou Junhui, Zhang Hai. Study on the change of wheat yield and soil fertility by long-term positioning fertilization[J]. Chinese Agricultural Digest: Agriculture Engineering, 2017, 29(4): 18-20. (in Chinese with English abstract)
[8] 舒時富,唐湘如,羅錫文,等. 機械定位深施超級稻專用肥提高土壤肥力和稻產量[J]. 農業工程學報,2013,29(23):9-14. Shu Shifu, Tang Xiangru, Luo Xiwen, et al. Deep mechanized application of super rice special fertilizer increasing soil fertility and yield of super rice[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(23): 9-14. (in Chinese with English abstract)
[9] 張益望,劉文兆,王俊,等. 定位施肥對冬小麥生長、產量及水分利用的影響[J]. 生態經濟,2009,(10):35-39. Zhang Yiwang, Liu Wenzhao, Wang Jun, et al. Effects of continuous fertilization on the growth, yield and water consumption of winter wheat[J]. Ecological Economy, 2009, (10): 35-39. (in Chinese with English abstract)
[10] 歐俊輝,張海. 長期定位施肥對小麥產量及土壤肥力的影響[J]. 安徽農業科學,2017,45(15):126-128. Ou Junhui, Zhang Hai. Effects of long-term located fertilization on wheat yield and soil fertility[J]. Journal of Anhui Agricultural Sciences, 2017, 45(15): 126-128. (in Chinese with English abstract)
[11] 張俊華,張佳寶. 長期定位施肥條件下作物光譜特征及養分吸收量預測[J]. 農業工程學報,2014,30(7):173-181. Zhang Junhua, Zhang Jiabao. Canopy spectral characteristics of crops and prediction on main nutrients uptake in long-term fertilization experiment[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(7): 173-181. (in Chinese with English abstract)
[12] 馬力,楊林章,沈明星,等. 基于長期定位試驗的典型稻麥輪作區作物產量穩定性研究[J]. 農業工程學報,2011,27(4):117-124. Ma Li, Yang Linzhang, Shen Mingxing, et al. Study on corp yield stability in a typical region of rice–wheat rotation based on long-term fertilization experiment[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2011, 27(4): 117-124. (in Chinese with English abstract)
[13] 楊旸,張樹蘭,楊學云,等. 長期定位施肥對旱作塿土小麥產量、養分效率及養分平衡的影響[J]. 土壤通報,2017,48(5):1162-1168. Yang Yang, Zhang Shulan, Yang Xueyun, et al. Effect of long-term fertilization on wheat yield, nutrient use efficiency and nutrient nalance in rainfed lousoil[J]. Chinese Journal of Soil Science, 2017, 48(5): 1162-1168. (in Chinese with English abstract)
[14] 左興健,武廣偉,付衛強,等. 風送式水稻側深精準施肥裝置的設計與試驗[J]. 農業工程學報,2016,32(3): 14-21. Zuo Xingjian, Wu Guangwei, Fu Weiqiang, et al. Design and experiment on air-blast rice side deep precision fertilization device[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(3): 14-21. (in Chinese with English abstract)
[15] 陳雄飛,羅錫文,王在滿,等. 水稻穴播同步側位深施肥技術試驗研究[J]. 農業工程學報,2014,30(16):1-7. Chen Xiongfei, Luo Xiwen, Wang Zaiman, et al. Experiment of synchronous side deep fertilizing technique with rice hill-drop drilling[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(16): 1-7. (in Chinese with English abstract)
[16] 王慶杰,李洪文,何進,等. 并列組合式種肥分施防堵裝置的設計與試驗[J]. 農業機械學報,2008,39(12): 73-77. Wang Qingjie, Li Hongwen, He Jin, et al. Design and experiment on paratactic separate application of fertilizer and seed mechanism[J]. Transactions of the Chinese Society for Agricultural Machinery, 2008, 39(12): 73-77. (in Chinese with English abstract)
[17] 薛少平,朱瑞祥,姚萬生,等. 機播小麥種子與肥料適宜間隔距離研究[J]. 農業工程學報,2008,24(1):147-151. Xue Shaoping, Zhu Ruixiang, Yao Wansheng, et al. Suitable distance between wheat seeds and fertilizer during mechanical sowing[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2008, 24(1): 147-151. (in Chinese with English abstract)
[18] 姚宗路,王曉燕,高煥文,等. 小麥免耕播種機種肥分施機構的改進與應用效果[J]. 農業工程學報,2007,23(1):120-124. Yao Zonglu, Wang Xiaoyan, Gao Huanwen, et al. Improvement and experiment on the device for separate application of fertilizer and seed for no-till wheat drill[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2007, 23(1): 120-124. (in Chinese with English abstract)
[19] 李慧,佟秋成,陳魁,等. 分層側深施肥播種機的研發[J]. 中國農機化學報,2013,34(5):105-108. Li Hui, Tong Qiucheng, Chen Kui, et al. Research and development of layered and deep side fertilizing & precision seeding machine[J]. Journal of Chinese Agricultural Mechanization, 2013, 34(5): 105-108. (in Chinese with English abstract)
[20] 姚萬生,薛少平,朱瑞祥,等. 組合式下位分層施肥播種開溝器的研制[J]. 西北農林科技大學學報(自然科學版),2008,36(8):223-228. Yao Wansheng, Xue Shaoping, Zhu Ruixiang, et al. Development of the combined layered fertilizing-seeding ditcher[J]. Journal of Northwest A&F University (Nat. Sci. Ed.), 2008, 36(8): 223-228. (in Chinese with English abstract)
[21] 張中鋒,丁宏斌. 2BLGF-13行壟作溝灌分層施肥麥類播種機的設計[J]. 中國農機化,2012,(6):74-77. Zhang Zhongfeng, Ding Hongbin. 2BLGF-13 the design of layered fertilization wheat seeder with ridge furrow irrigation [J]. Chinese Agricultural Mechanization, 2012, (6): 74-77. (in Chinese with English abstract)
[22] 李永磊,宋建農,康小軍,等. 雙輥秸稈還田旋耕機試驗[J]. 農業機械學報,2013,44(6):45-49. Li Yonglei, Song Jiannong, Kang Xiaojun, et al. Experiment on twin-roller cultivator for straw returning[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(6): 45-49. (in Chinese with English abstract)
[23] 牛琪,王慶杰,陳黎卿,等. 秸稈后覆蓋小麥播種機設計與試驗[J]. 農業機械學報,2017,48(11):52-59. Niu Qi, Wang Qingjie, Chen Liqing, et al. Design and experiment on straw post-covering wheat planter[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(11): 52-59. (in Chinese with English abstract)
[24] 吳波,李問盈,李洪文,等. 壟臺修復中耕施肥機的設計[J]. 農業工程學報,2008,24(9):99-102. Wu Bo, Li Wenying, Li Hongwen, et al. Design of ridge reshaping and intertillage fertilizer applicator[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2008, 24(9): 99-102. (in Chinese with English abstract)
[25] 李金琦. 旋轉開溝機[M]. 北京:中國農業機械出版社,1984.
[26] 孔令德,王國林. 旋耕拋土模型研究綜述[J]. 江蘇理工大學學報,1997,18(5):32-36. Kong Lingde, Wang Guolin. A survey of research on rotary siol-throwing model[J]. Journal of Jiangsu University of and Technology, 1997, 18(5): 32-36. (in Chinese with English abstract)
[27] 宋建農,李自華. 反轉旋耕理論分析[J]. 北京農業工程大學學報,1990,10(3):15-22. Song Jiannong, Li Zihua. Theoretical studies of reverse rotary tillage[J]. Journal of Beijing Agricultural Engineering University, 1990, 10(3): 15-22. (in Chinese with English abstract)
[28] 頓國強,陳海濤,馮夷寧,等. 調比控位分層施肥裝置設計與試驗[J]. 東北農業大學學報,2015,46(12):86-93. Dun Guoqiang, Chen Haitao, Feng Yining, et al. Design and test of adjustable ratio and control position separated layer fertilization device[J]. Journal of Northeast Agricultural University, 2015, 46(12): 86-93. (in Chinese with English abstract)
[29] 呂昊. 外槽輪排肥器優化設計新方法研究[D]. 長春:吉林大學,2014. Lü Hao. A New Kind of Method for Optimized Design of Outer Groove-wheel Fertilizer Apparatuses[D], Changchun: Jilin University, 2014. (in Chinese with English abstract)
[30] 苑進,劉勤華,劉雪美,等. 配比變量施肥中多肥料摻混模擬與摻混腔結構優化[J]. 農業機械學報,2014,45(6):125-132. Yuan Jin, Liu Qinhua, Liu Xuemei, et al. Simulation of multi-fertilizers blending process and optimization of blending cavity structure in nutrient proportion of variable rate fertilization[J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(6): 125-132. (in Chinese with English abstract)
[31] 劉孝民,桑正中. 潛土逆轉旋耕拋土研究[J]. 農業機械學報,1996,27(4):41-45. Liu Xiaomin, Sang Zhengzhong. Study on soil-throwing of back-rotary cultivation[J]. Transactions of the Chinese Society for Agricultural Machinery, 1996, 27(4): 41-45. (in Chinese with English abstract)
[32] 蔣建東,高潔,趙穎娣,等. 土壤旋切振動減阻的有限元分析[J]. 農業機械學報,2012,43(1):58-62. Jiang Jiandong, Gao Jie, Zhao Yingdi, et al. Finite element simulation and analysis on soil rotary tillage with external vibration excitation[J]. Transactions of the Chinese Society for Agricultural Machinery, 2012, 43(1): 58-62. (in Chinese with English abstract)
[33] 張軍,丁啟朔,丁為民,等. 分層旋耕對水稻土耕層物理性狀的影響[J]. 南京農業大學學報,2015,38(6): 1016-1022. Zhang Jun, Ding Qishuo, Ding Weimin, et al. Effect of stratified rotary tillage on paddy soil physical properties[J]. 2015, 38(6): 1016-1022. (in Chinese with English abstract)
Relationship model of fertilizer outlet location and fertilizer application depth of depth-fixed application device of base-fertilizer
Zhu Qingzhen1,2, Wu Guangwei2, An Xiaofei2, Chen Liping3, Meng Zhijun3, Zhao Chunjiang1,2※
(1.712100,;2.100097,; 3.100097,)
Winter wheat is the most important crop in China, which has a large planting area, a high per unit area yield and a high total output. This is important to the maintenance of national food security. Base-fertilizer application is an important process of winter wheat production, which directly affects the yield of crops, and reasonable and effective use of chemical fertilizer can improve the yield of crops. At present, base-fertilizer of winter wheat is applied to the surface of farmland by manure spreader or laborers. Then the rotary tiller or moldboard plow is used to bury the fertilizer underground. The method has the problems of disordered fertilizer, excessive fertilizer delivery and low utilization efficiency. The depth-setting fertilizer application for winter wheat is an ideal way of fertilization. It can carry out a uniform fertilization to the winter wheat’s underside position with a certain depth, which can reduce fertilizer amount compared with the traditional fertilization operation. It is a fertilization technique with high output, stable yield and low cost. Combined with the characteristics of rotary tillage fertilizing of winter wheat in Huanghe-Huaihe-Haihe (HHH) zone of China, this paper proposes a precise depth-setting fertilizer application method based on principle of rotary tillage. From the kinematics analysis of rotary blade and soil block respectively, the mathematical model of the positions of fertilizer outlet orifice of steel pipe and the target depth of fertilization was established. In order to validate this mathematical model, a precision rotary tillage fertilization test platform was set up. The test platform includes tractor, depth-controlled component, rotary tillage device, fertilizer ejecting device, precision hydraulic control system and press device. The fertilizer ejecting device is the key part of the test platform. It includes longitudinal beam, fastening bolt, steel pipe of fertilizer ejecting, U-shaped bolt and sleeve. The steel pipe of fertilizer ejecting can be adjusted longitudinally and laterally according to the requirements of the test. In order to accurately validate the mathematical model, 2 groups of progressive experiments were designed and conducted at the National Experiment Station for Precision Agriculture in Xiaotangshan Town, Beijing City in October 2017. After testing, the hardness, humidity and temperature of soil in the test area at the depth of 0-10 cm were 615.0 kPa, 10.9% and 17.6℃, respectively. In the experiment, the IT245 rotary blade cutting operation parts were selected, and power transfer mechanism used John Deal 1204 tractor. The tractor was controlled at the speed of 1.5 m/s, the rotational speed of rotary blade was stable at 180 r/min, and the rotary tillage depth was set to 200 mm in the verification test. The experiment selected blue fertilizer as the application object. Target fertilization depth was set as 80, 100, 120, 140, and 160 mm, respectively, for the precision fertilization field test, and the actual depth of fertilization was 73, 92, 111, 132 and 151 mm, respectively. The maximum offset deviation of fertilization depth was 9 mm, and the maximum deviation ratio of fertilization depth was 8.75%, which could meet the requirement of the actual production. The results of these experiments show that the mathematical model of the positions of fertilizer outlet orifice of steel pipe and the target depth of fertilization established is trustworthy. The results can be a theoretical basis for design and development of rotary tillage and fertilization equipment.
mechanization; fertilizer; models; base-fertilizer application; located fertilization; mathematical modeling; rotary tillage; precision fertilization
祝清震,武廣偉,安曉飛,陳立平,孟志軍,趙春江.基肥定深施用裝置排肥口位置與施肥深度關系模型[J]. 農業工程學報,2018,34(13):8-17.doi:10.11975/j.issn.1002-6819.2018.13.002 http://www.tcsae.org
Zhu Qingzhen, Wu Guangwei, An Xiaofei, Chen Liping, Meng Zhijun, Zhao Chunjiang. Relationship model of fertilizer outlet location and fertilizer application depth of depth-fixed application device of base-fertilizer[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(13): 8-17. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2018.13.002 http://www.tcsae.org
2018-01-21
2018-06-11
國家重點研發計劃項目(2016YFD0200600,2016YFD0200601);北京市農林科學院院級科技創新團隊(JNKYT201607)
祝清震,博士研究生,主要從事小麥基肥精準定位施用與裝備研究。Email:zhenforyou@163.com
趙春江,中國工程院院士,研究員,博士生導師,主要從事農業信息技術與精準農業技術研究。Email:zhaocj@nercita.org.cn
10.11975/j.issn.1002-6819.2018.13.002
S222.4
A
1002-6819(2018)-13-0008-10
猜你喜歡
中學生數理化·七年級數學人教版(2022年6期)2022-06-05 06:50:50
快樂學習報·教育周刊(2022年16期)2022-05-01 21:25:05
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年6期)2019-01-08 02:43:04
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
新聞傳播(2016年10期)2016-09-26 12:14:59
新聞傳播(2015年10期)2015-07-18 11:05:40
交通建設與管理(2015年15期)2015-03-20 15:18:57