基于CAN總線和PWM控制方式的起壟施肥系統研究
2018-08-10 02:25:26車守全盧劍鋒張富貴曹繼超李宜汀王永濤
農機化研究 2018年12期
關鍵詞:系統
車守全,盧劍鋒,張富貴 ,曹繼超,李宜汀,王永濤
(1.貴州大學 a.機械工程學院;b.現代制造技術教育部重點實驗室,貴陽 550025;2.貴州東峰自動化科技有限公司,貴陽 550025;3.貴州省水利科學研究院,貴陽 550002)
0 引言
農業機械田間效(Field Efficiency)概念逐漸在影響農業機械化研究。貴州省內烤煙種植面積大,是當地重要作物之一,施肥是其中重要環節。國內精準施肥技術尚處在發展階段,明顯落后于國外技術,技術成本和推廣成本均較高。
國內常用的農業現場局域網方式為Zig Bee,用于定點數據采集。近幾年,國內外關于CAN總線在移動農業機械上的應用逐步開始,CAN總線方式的數據收集和分析方式為農機發動機運行、耕種提供穩定的物理層和數據鏈路層支撐[1-3]。CAN總線具有高性能、高可靠性的特點,減少了在農業機械上分布的傳感器、驅動器的布線量,且方便將施肥系統嵌入到農業車輛系統中,提高了農機設備的集成度,降低了整機系統的開發成本[4-5]。
以往的施肥方式多為電機恒速施肥,而PWM控制步進電機施肥方式能根據農機運動速度調節電機轉速實現精準施肥。步進電機控制具有穩定性高、誤差小及不累積的特點,不受電壓波動和負載的影響,甚至不需要閉環控制環節[6],通過設計PWM控制策略就能實現電機精準和平穩的工作過程。另一方面,車輛打滑時的施肥精度一直是多雨的貴州高原需要解決的問題。
1 系統概述
系統的功能設計要求是:傳感器采集空氣溫度、濕度模擬實時氣象站,GPS采集車輛速度和地理信息,控制施肥電機驅動器,從而控制施肥量,保證在速度變化時單位面積土地施肥量一定,同時反饋施肥電機轉速。信息和控制方式在駕駛艙內的上位觸摸屏中顯示和操作。同時,利用GPRS模塊與主控制器通信,將數據顯示并存儲到遠程客戶端。系統網絡如圖1所示。
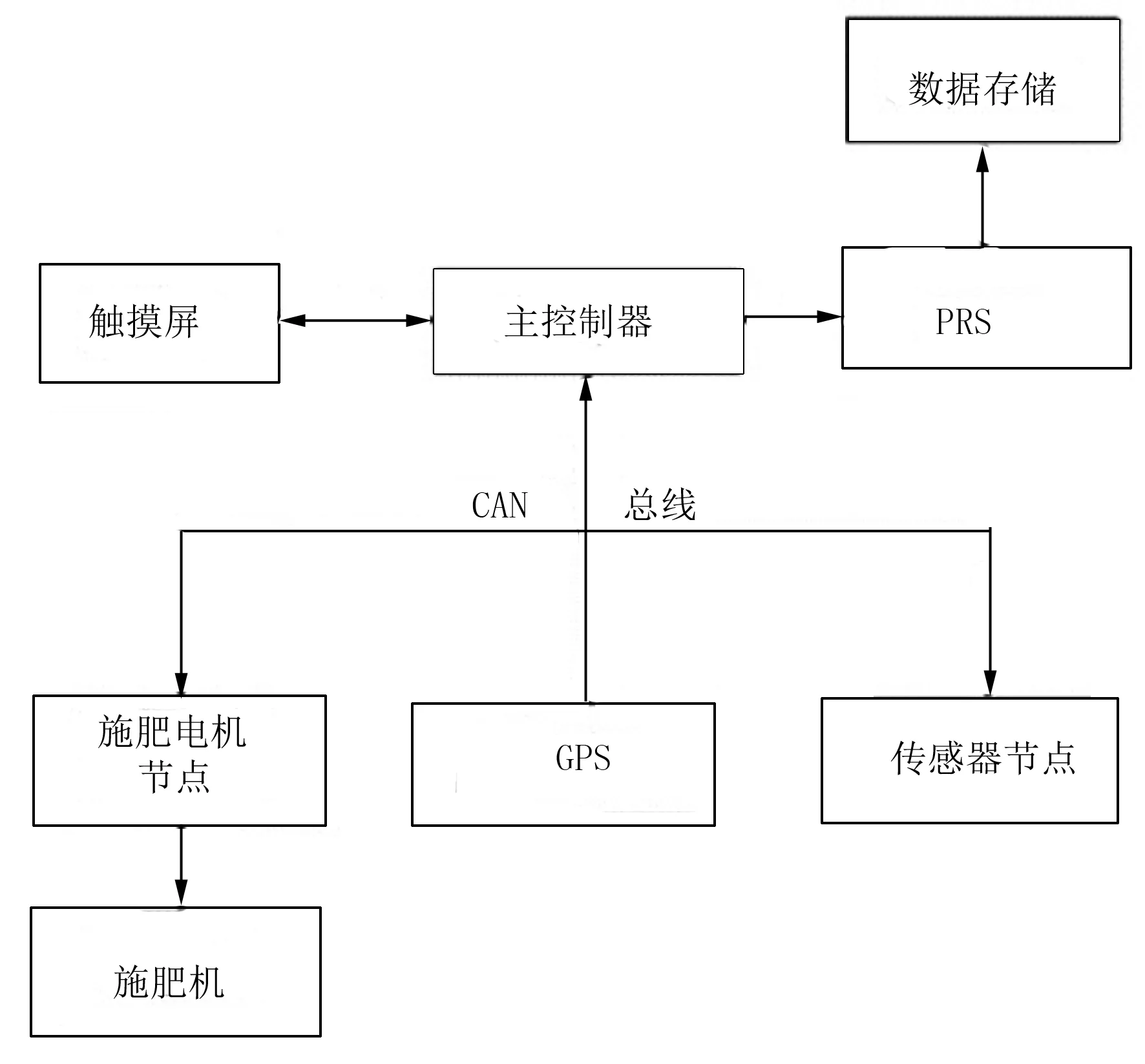
圖1 系統網絡圖Fig.1 The structure of the system
起壟雙料施肥機結構如圖2所示。

1.排肥傳動機構 2.變速箱 3.起壟仿形板 4.行走輪 5.旋耕刀片 6.排肥管 7.為排肥舌 8.接肥漏斗 9.施肥槽輪機構 10.為外槽輪 11.雙料箱
2 CAN總線硬件設計
CAN總線硬件設計主要分為兩部分:①節點設計;②主控制器—CAN網關設計。節點為各個分布傳感器、GPS信號和施肥電機驅動器終端,主控制主要負責CAN總線上數據采集、驅動器控制,以及作為網關和上位機觸摸屏的通信。
2.1 總線節點的設計
總線節點主要實現的功能是轉換傳感器的模擬信號及解析GPS設備協議數據幀,并將信息封裝成為符合CAN協議2.0A的幀形式通過總線發送到主控制器[7]。總線節點分布如圖3所示。其中,R1、R2為終端電阻,根據總線性質選為120Ω[8]。

圖3 CAN總線示意圖Fig.3 The sketch map of CAN bus
節點收發驅動器選用TJA1050,通過驅動器上CAN接線端子接入到總線上,如圖4所示。
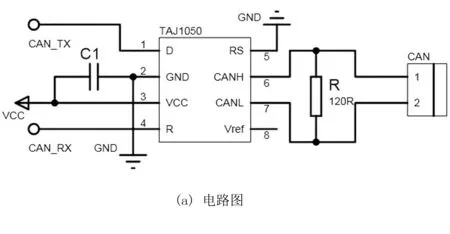

圖4 CAN總線接口圖Fig.4 The interface of CAN bus
節點控制器選用STM32f107VCT6,此單片機帶有3個12位A/DC和2個12為D/AC轉換器,不需要再搭建別的外圍IC就可以滿足總線節點功能需求。其中,CAN_TX/RX連接單片機的CAN_TX/RX復用IO口,CAN1、2為節點接入總線端子。
2.2 CAN網關硬件設計
CAN網關主要作用是接收和發送CAN總線上數據幀,及連接上位機觸摸屏。在總線數據收發功能上用到的驅動器依舊采用如圖4所示的結構。同時,除了起到數據協議轉換的功能外,CAN網關的主控制器還需要處理接收到的速度值,最終輸出驅動器控制信號,保證施肥量在單位面積上的恒定。主控制器采用STM32F407ZGT6。CAN網關需要和上位機觸摸屏建立通信,傳輸農機作業數據在觸摸屏顯示、設定施肥速度等。
3 CAN總線軟件設計
3.1 數據幀發送和接收
設置CAN總線位時序段長就可以設定CAN總線通信波特率[9]。為保證通信,網關和節點的波特率設置一致。在主控制器STM32中,CAN總線波特率為500kbps。網關CAN接收數據幀的過程如圖5所示。在此過程中,需要定義過濾器,過濾器根據標示符過濾不需要的信號數據,本文使用濾波器0并將其與FIFO0關聯。
溫濕度傳感器及GPS發送函數標識符ID設置為0xF110,GPS ID設置為0xF100,GPS節點在總線上傳輸優先級更高。主控制器ID為0xF0F0,施肥機驅動器節點控制器CAN濾波器器標識符ID為0xF0F0,模式為32位標識符列表,則驅動器節點只接收網關數據,施肥電機驅動器信號優先級最高。主控制器接收到CAN總線數據時產生1個中斷,進行數據處理。
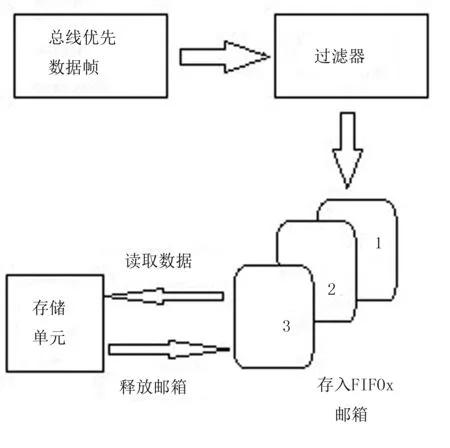
圖5 接收數據幀過程Fig.5 The process of receiving data frame
主控制器需要識別數據來源,在溫度、濕度、速度及轉速數據幀的數據段最高位中分別加入字符T、H、S、N作為標示符。
3.2 田間GPS通信
NMEA0183是GPS標準協議,GPS設備通過USART與GPS節點控制器通信,控制器解析數據之后按上一節的封裝方法發送到總線上等待網關接收GPS模塊,如圖6所示。通過模塊數據采集,能夠確定田間作業位置、農機速度并記錄。GPS數據在單片機上的解析過程如圖8所示。解析$GPGGA指令,得到經緯度數據。指令$GPVTG解析過程與之類似,得到速度值,精度0.1km/h。
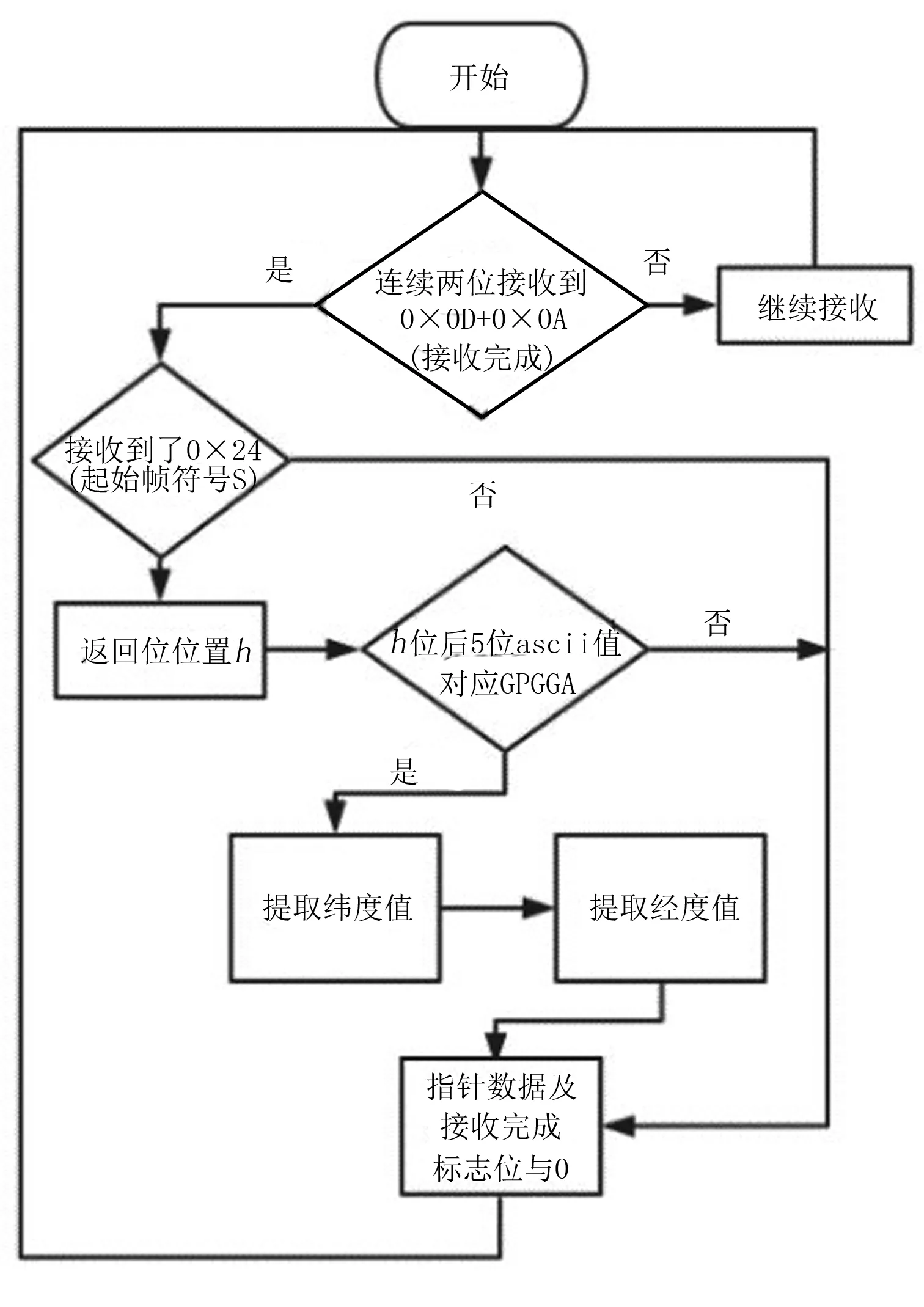
圖6 GPS數據串行通信圖Fig.6 The signal communication of GPS
GPS測速的優點在于精度高,能夠記錄地理位置,方便進行同一地區不同作物施肥分區域設定;另一方面,相比于編碼器測車輪轉速換算車輛速度,GPS測速避免了打滑時車輛物理速度時小于傳感器速度出現過度施肥的情況。
4 施肥系統的自動控制過程
自動施肥系統目的是車輛不同速度下實現施肥量均勻。實現方式是:根據土地適宜施肥量通過實驗采集了6組速度—施肥機槽輪轉速對應值[11];根據車輛速度,在6組典型值中做插值運算得到實時施肥機轉速,由主控制器通過CAN輸出控制值到施肥機驅動器節點,控制施肥電機轉速;另一方面,轉速編碼器將施肥機轉速ADC轉換存入寄存器中傳輸到觸摸屏中反饋。
設時刻t車輛速度采樣值為v,得到施肥槽輪的轉速為:n1=kv。其中,k為兩個實驗值間的線性插值比例系數,步進電機轉速為n0=εn1,ε為轉速比。步進電機具體控制方式為主控制器輸出特定頻率PWM脈沖,經過驅動器隔離放大輸出同頻率驅動電壓,控制電機達到設定轉速。PWM原理如圖7所示。

圖7 PWM示意圖Fig.7 The sketch map of PWM
其表達式為
其中,T為主控制器產生脈沖的基本周期;N為1個PWM周期內產生的脈沖數;n為1個PWM周期內產生的高電平脈沖數;k為產生的諧波次數。主控制器設定PWM表達式內的T、N、n值,就可以得到在PWM周期內一定寬度和頻率的高電平脈沖,脈沖寬度保證脈沖能夠被驅動器識別,脈沖頻率的大小控制步進電機的轉速。PWM高電平脈沖頻率f為
其中,n為步進電機轉速,φ為驅動器細分數,θ為步距角。同時,f≤fm,fm為驅動器最大識別脈沖頻率。

由軸的剛度可得出
M=K(θH-θL)
其中,M為傳動軸扭矩;(θH-θL)為槽輪與電機轉速差;K為乘數。當轉速差大時,傳動軸有較大沖擊。
為了避免在電機啟動帶動施肥系統運行時加速度大無法啟動,以及速度大幅變化時施肥系統慣性較大與步進電機軸產生沖擊,需要設計PWM產生曲線。采用的方法是:在PWM輸出變化率大于絕對值2kpbs時,高電平波以絕對值500pbs變化率達到輸入脈沖速度。
5 試驗及分析
按照設計的功能和控制過程,設計完成CAN總線局域網絡施肥系統,車載實驗如圖8所示。

圖8 現場實驗圖Fig.8 The experiment
試驗在貴州大方烤煙種植園區進行,施肥雙料為NPJ復合顆粒肥和生物炭有機肥。根據試驗得到適宜施肥量對應的槽輪轉速,計算得到步進電機轉速,如表1、表2所示。

表1 不同轉速下施肥槽輪測定轉速Table 1 The rev of sheave with different speed of vehicle
得到施肥偏差表如表2所示。

表2 雙料施肥偏差Table2 The fertilizer error
系統還進行了打滑試驗。車輛本身系統檢測方式為通過霍爾傳感器檢測輪速得到車輛行進速度,但這個方法對于多雨和多山地的貴州地區在施肥時會產生較大誤差。系統通過GPS測速作為步進電機控制參考速度。打滑施肥試驗如表3所示。

表3 打滑施肥試驗Table 3 The experiment of skidding test
結果表明,系統GPS測速對車輛打滑時施肥誤差有很大抑制作用。
根據采集樣本檢測施肥均勻度過程如下:施肥樣本量為xi,計算施肥均值,即
施肥樣本標準差為
設定20個5kg復合肥試驗采樣點,平均施肥量5.28kg,則標準差為0.23kg,變異系數Cv=0.044,施肥均勻度較好。
CAN總線將傳感器、編碼器數據傳輸到駕駛室內觸摸屏,駕駛室內觸摸屏綁定IO輸入輸出域,顯示傳感器信息及輸出施肥標準量設定值,并通過GPRS在遠端存儲,如圖9所示。
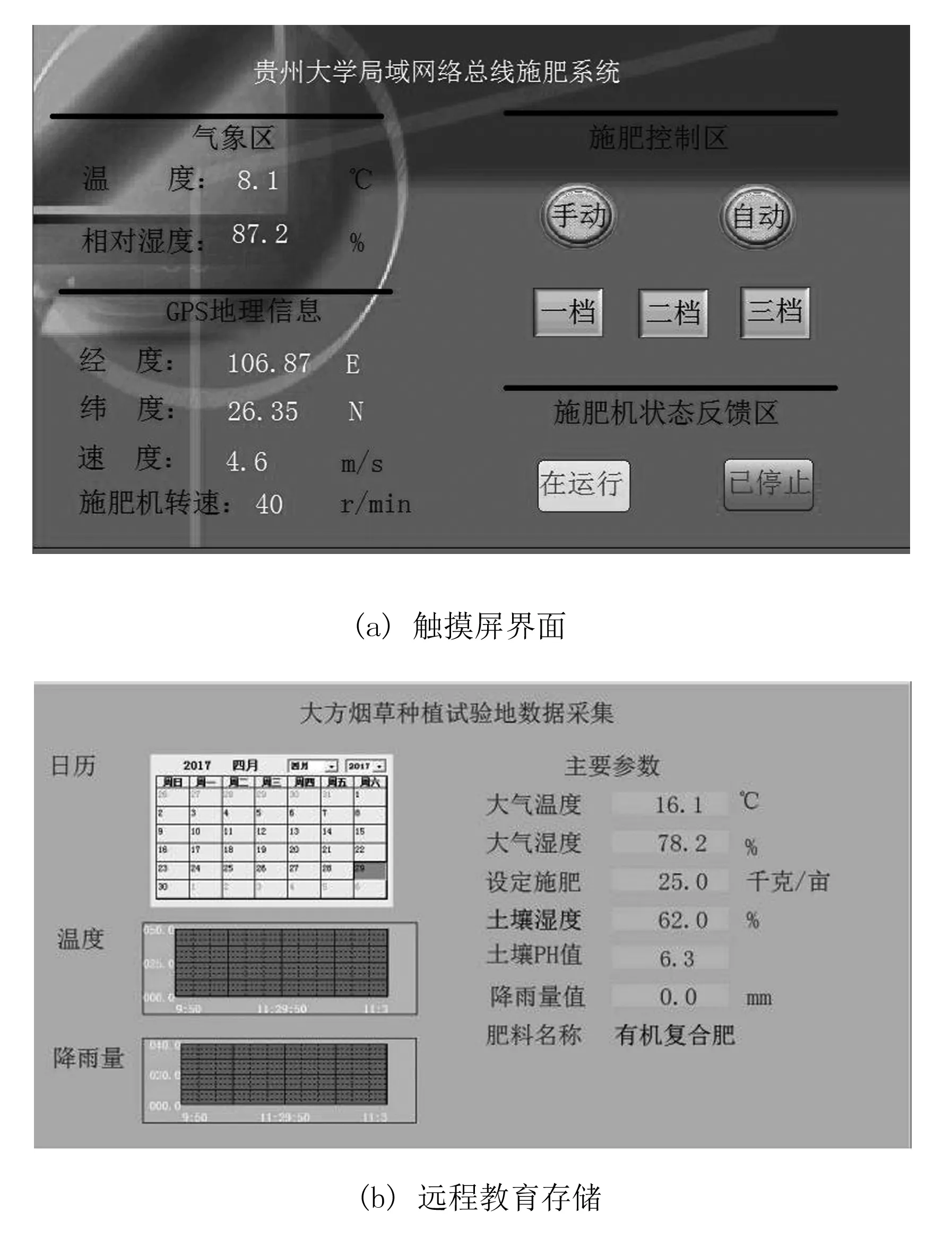
圖9 人機交互Fig.9 The human-computer interaction system
6 結論
1)CAN總線上數據傳輸速率高,穩定可靠。節點和主控制器之間的布線量減少,節點設備的添加更方便,主控制器的網關功能將CAN協議和主流工業協議MODEBUS轉換,適配大部分工業觸摸屏。該系統整機集成度高,便于嵌入到車輛電子系統,開發成本較低,具有很高的移植性。
2)系統不僅滿足了自動施肥的需要,而且提高了農機田間效率,施肥均勻。采用的PWM控制配合高性能STM32F4主控制器控制步進電機方式,不需要復雜的反饋控制方式就能在極短時間內計算出與車輛速度匹配的施肥轉速,并在啟動、加速度值較大條件下有平穩表現。相比于傳統測速施肥方式,系統有效地解決了車輛打滑時施肥精度和均勻性問題,避免了以往在貴州地區施肥出現的困擾。
3)遠程數據檢測和存儲為歷史數據分析和施肥策略提供了平臺支撐,提供了建立農業作業數據庫的采集終端。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
