植保無人機主要性能指標測評方法的分析與思考
2018-08-10 02:25:12徐小杰陳盛德周志艷蘭玉彬羅錫文
農機化研究 2018年12期
徐小杰,陳盛德,周志艷,2,蘭玉彬,羅錫文
(1.華南農業大學 工程學院/國家精準農業航空施藥技術國際聯合研究中心/廣東省農業航空應用工程技術研究中心/國際農業航空施藥技術聯合實驗室,廣州 510642; 2.南方糧油作物協同創新中心,長沙 410128)
0 引言
我國是一個農業大國,隨著糧食產量的增長,我國的農業生產進入到了新的階段[1]。近年來,我國的農業種植經營方式已從家家戶戶小農業向合作社、種糧大戶、農場等規模化大農業發展,擁有大面積土地的種植戶在現有的機械化基礎上向農業現代化、農業信息化、精準農業等方向發展,對農業高新技術的需求提出了更高的要求[2-3]。
植保作業是農業生產過程中必不可少的環節,其勞動周期長、勞動強度大且時效性要求高[4]。隨著大規模化農業的發展,必然對植保器械的作業方式和作業效率有更高的要求。目前,我國農用植保器械主要包括人力器械、地面動力機械及航空植保器械。其中,傳統的人力器械作業方式勞動強度大、效率低、耗時長且對作業人員有危害,難以應對突發性病蟲害[5-6];地面動力機械作業方式成本高、藥劑有效利用率低[7],且下田作業困難,易損傷農作物及土壤物理結構,影響農作物后期生長[8];而農用航空器械作為我國近年來的新型植保作業方式,克服了我國傳統噴施方式的弊端,航空植保器械作業效率高,成本低,防控效果好,其作業能力是地面機械的3倍、人工的30倍[9-10],且可解決水稻生長過程中地面機械難以下田作業等問題[11],正逐漸成為人們首選的噴施作業方式。其中,作為航空植保器械的重要組成之一的植保無人機,近年來的迅速發展和應用引起了人們的廣泛關注[12-14]。在航空植保器械中,農用無人機與有人駕駛農用飛機相比,具有無需專用機場和專業飛行員、維護成本低、航空管制少等特點[15]。農用無人機體積較小,作業精度高,進行航空植保作業時可在田間地頭完成起降、加油和加注藥液等工作,減少了往返機場的飛行時間及燃料消耗,保證了作業效率[16];同時,還具有作業地形適應性廣的優點,對于農民用戶耕地面積較小、地形多山的作業地形而言,農用無人機比農用有人機更適合進行作業[17-19]。
無人機技術在農業等方面的應用無疑是農業現代化進程中一場偉大的變革,隨著土地向種糧大戶和家庭農場主逐漸集中,植保無人機在未來的農業應用中必將大顯身手。據統計,近年來無人機在我國主要農作物施藥需求的市場規模產值將達到2 298億元。隨著無人機在農業方面應用的興起,全國各地都在競相研發和推廣植保無人機應用技術[20-21];但是,目前如何在我國大規模推廣植保無人機應用技術還存在許多的問題。首先,我國的農業航空政策法規體系不完善,缺乏詳細的發展戰略規劃;其次,農業航空社會化服務體系不健全,專業隊伍人才匱乏[22];最后,農用無人機配套核心科學技術研究不足,缺乏高穩定性、高可靠性的植保無人機。在無人機市場競爭激烈的今天,農民用戶必然傾向性能好、壽命高、可靠性高的產品;而現在越來越多的無人機生產商只注重生產量,而忽略了飛機性能的好壞,過多的低性能無人機在市場上的出現已經嚴重阻礙了植保無人機應用技術的推廣。因此,植保無人機的性能指標測試就顯得尤為重要,科學、全面地實現對植保無人機性能指標測評是解決阻礙我國植保無人機應用技術大規模推廣問題的重要途徑之一。
本文擬在分析植保無人機綜合性能指標中的可靠性能指標、抗風性能指標、載荷性能指標、振動性能指標和噴施作業性能等5個主要性能指標測試必要性的基礎上,對當前這5個主要性能指標的測試方法進行深入剖析,指出各種測試方法的優點及不足,并對目前關于植保無人機綜合性能測試中還存在的問題進行歸納,以期指出未來植保無人機性能指標測試體系完善和技術發展的方向。
1 評價植保無人機綜合性能的主要測評指標
植保無人機的性能指標不僅是無人機本身性能好壞的直接體現,更是無人機航空作業性能優劣與安全的間接反映。因此,科學、全面的植保無人機綜合性能測評指標體系不但對于植保無人機的研制和生產有一定的參考指導意義,而且對于我國無人機在農業各方面的應用推廣更具有積極的推動作用。
對于植保無人機綜合性能來說,主要有任務成功率、有效載荷量、有效飛行時間、續航時間、抗風等級、航線精度、作業質量及作業效率等多個指標;而以上植保無人機的綜合性能均可通過可靠性能指標、載荷性能指標、抗風性能指標、振動性能指標及噴施作業性能等比較全面地概括出來。植保無人機綜合性能的主要測評指標如圖1所示。
1.1 可靠性能指標
可靠性能是指系統在規定的條件下和規定的時間內完成規定功能的能力[23-24],植保無人機的可靠性能主要是指其飛行作業任務的成功率[25]。在植保無人機的眾多性能指標中,可靠性能是首要的指標。當飛機的可靠性能不能保證時,其他的任何性能指標都會成為空談。無人機系統作為一個整體,主要由機身結構系統和飛行控制軟件系統組成,因此無人機的可靠性能主要分為機身材料和結構可靠性能、飛行控制軟件系統可靠性能和系統可靠性能[26]。
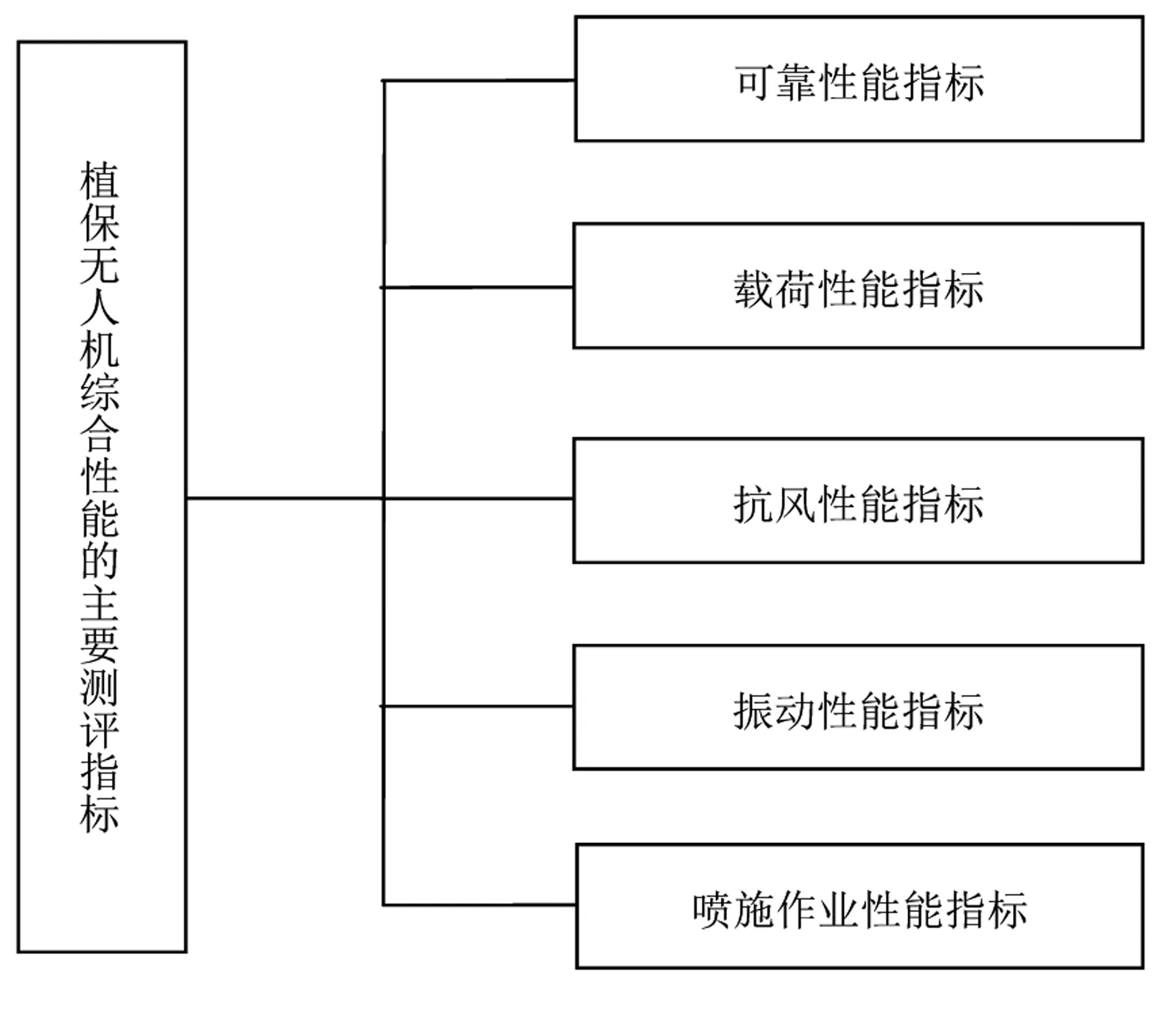
圖1 植保無人機主要測評指標Fig.1 Main evaluation indexes of plant protection UAV
1.1.1 機身材料和結構可靠性能
為了進一步優化植保無人機的機動靈活性和任務載荷性,無人機的機身設計正朝著體積小和質量輕的方向發展[27]。機身結構作為飛機系統中的硬件,機身材料的好壞必然會影響到無人機的可靠安全性能的高低[28],因此植保無人機的零部件材料、機身結構的損傷和疲勞壽命必須重新加以測試和鑒定。
1.1.2 飛行控制軟件系統可靠性能
飛行控制軟件系統作為無人機的核心,對植保無人機至關重要,一旦出現故障,無人機就會出現事故[29-30],其可靠性能程度的高低決定著無人機的工作狀態和壽命。所以說,飛行控制軟件系統的可靠性能是無人機可靠性能保障的核心要素[31],其能測試是植保無人機可靠性能測試中非常重要的一個環節。
1.1.3 系統可靠性能
對于整個無人機系統來說,可靠性能不僅僅包括硬件結構可靠性能和軟件可靠性能,還應考慮硬件和軟件融合成一個系統的可靠性能[32-33]。無人機系統可靠性能主要是指硬件和軟件融合后其飛行任務的成功率,即任務可靠性。通過系統可靠性能測試,不僅可以確認生產出來的無人機系統是否滿足可靠性定量要求,還可以不斷發現缺陷。完善整個無人機可靠性設計,是植保無人機系統在研制和生產階段提高和驗證可靠性能的必要工作。
1.2 抗風性能指標
飛機的抗風性能是飛機的穩定性能參數之一。植保無人機在空中飛行作業時,一般都是按照預定的軌跡路線或人為遙控路線飛行,但是風場作為一種不可避免的飛行環境,極大地影響植保無人機的飛行精度和作業品質,甚至影響到無人機的飛行安全。農業航空由于其復雜多變的作業環境,已經受到了很大的環境限制。因此,隨著植保無人機在農業方面更大規模的應用,其抗風性能越來越被重視,抗風性能指標測試也顯得尤為重要。
1.3 載荷性能指標
由于無人機在農業噴施方面的應用越來越廣,植保無人機的有效載荷越來越被重視。在無人機的設計中確定其有效載荷是植保無人機設計的基礎性工作,是在無人機結構安全性和無人機飛行性能與作業品質之間取得恰當協調的重要環節[34-35]。對有人駕駛飛機而言,載荷設計的確定一般是在強度規范的指導下完成的,但在植保無人機載荷設計領域目前尚無專門的強度規范,多是在借鑒有人駕駛飛機強度規范的基礎上進行的。因此,在參照有人駕駛飛機強度規范的基礎上,結合無人機的特點,較為系統地研究植保無人機有效載荷的設計與測試就顯得非常重要與迫切。
1.4 振動性能指標
隨著無人機的快速發展,植保無人機已經被應用到高要求、高精度的農業作業中。無人機在飛行過程中,由旋翼、動力系統等產生的高頻振動,將會嚴重影響無人機的飛行品質和作業質量[36],植保無人機在農田噴施作業過程中較大的振幅也會影響到飛機的噴施作業質量。因此,如何盡量檢測機身振動性能指標和降低振動幅度已經成為植保無人機設計領域面臨的重要問題。
1.5 噴施作業性能指標
農業航空噴施作業是植保無人機最主要的作業項目,其噴施作業性能是衡量植保無人機是否適于噴施作業的唯一指標[37-38]。理想的噴施作業效果是:所有的藥液都沉積在目標區域內的目標害蟲和作物上。然而在實際施藥過程中,受環境和其他因素的影響,大部分藥液都最終流失到非目標區域的環境中,導致鄰近作物的藥害、造成環境污染及人員中毒[39-40]。因此,測評和優化植保無人機的噴施作業性能對保證我國糧食安全、環境安全和生態安全有特別重大的意義。植保無人機噴施作業性能指標主要以霧化性能指標、作業質量性能指標及作業效率性能指標為體現。
1.5.1 霧化性能指標
藥液霧化是指通過壓力或高速旋轉使液體分散成微小液滴的操作過程,是植保無人機噴施作業能有效地結合超低容量施藥技術從而大幅度提高農藥利用率和減少農藥用量的關鍵點。在航空噴施過程中,如果噴施霧滴粒徑較大,農藥沉降到作物表面后容易流失而造成水土污染,且粗大的霧滴還會減少霧滴的覆蓋密度,將很大程度上降低藥液的效果;如果噴施霧滴粒徑過小,在環境風場及其他流場的作用下,霧滴極易發生大量飄移,降低農藥利用率,且還會造成鄰近作物的藥害和環境污染[41]。因此,霧化性能指標是影響植保無人機噴施作業效果與效率的一個關鍵因素。
1.5.2 作業質量性能指標
作業質量性能指標決定了航空噴施作業對病蟲草害的防治效果,是植保無人機噴施作業性能指標測試中最重要的一項。在航空噴施作業質量性能指標測試中,主要從單位面積霧滴沉積量、霧滴覆蓋密度及均勻度3個方面進行分析[42]。霧滴覆蓋密度和均勻性是提高噴霧質量和農藥利用效率的重要參考和依據。
1.5.3 作業效率性能指標
作業效率性能指標是衡量植保無人機噴施作業性能好壞的另一重要指標[43],是在保證作業質量指標的基礎上,對植保無人機有效作業快慢的重要體現。具有高作業效率性能的植保無人機對突發性、爆發性病蟲害的及時防控具有重要意義,因此實現植保無人機作業效率性能指標的有效測定對植保無人機噴施作業性能指標是一個必要的補充和完善。
2 主要性能測評方法的現狀與分析
2.1 可靠性能指標測試
2.1.1 機身材料和結構可靠性能測試
現階段,無人機機身材料和結構可靠性能測試主要是通過振動法(即由單軸或多軸振動試驗臺產生振動)來實現的[44-45]。飛機在飛行時,機身會發生多方向、高頻率的振動,振動試驗是對構件或產品在真實環境下的可靠性能進行鑒定的有效方法。振動試驗臺通過在一定的溫度、濕度環境中,分別在X、Y、Z軸單軸產生高頻振動并在另外兩軸施加載荷或者在X、Y、Z軸多軸產生高頻振動[27,46-47],來模擬無人機的真實飛行的振動情況,如圖2所示。對飛機的機身材料及結構進行振動和疲勞復合測試,以測得被測樣飛機機身構件和結構在環境及振動與疲勞的耦合作用下的損傷和壽命。對于單軸振動試驗和單軸振動并施加任務載荷試驗而言,雖然如今國外單軸振動試驗技術比較成熟[48-49]且施加載荷較接近真實飛行情況,但單軸振動試驗臺只能提供單點單向激勵,而實際上無人機的振源往往是多點多方向的,因此試驗測得的被測樣飛機構件及結構的損傷和壽命與實際使用情況必然有較大差別。多軸振動試驗臺可以提供多點多方向的振源,并沒有在試驗中給構件及整機施加任務載荷,沒有施加載荷的多軸振動試驗臺顯然是不完備的,與真實的飛行情況必然有一定的差距。
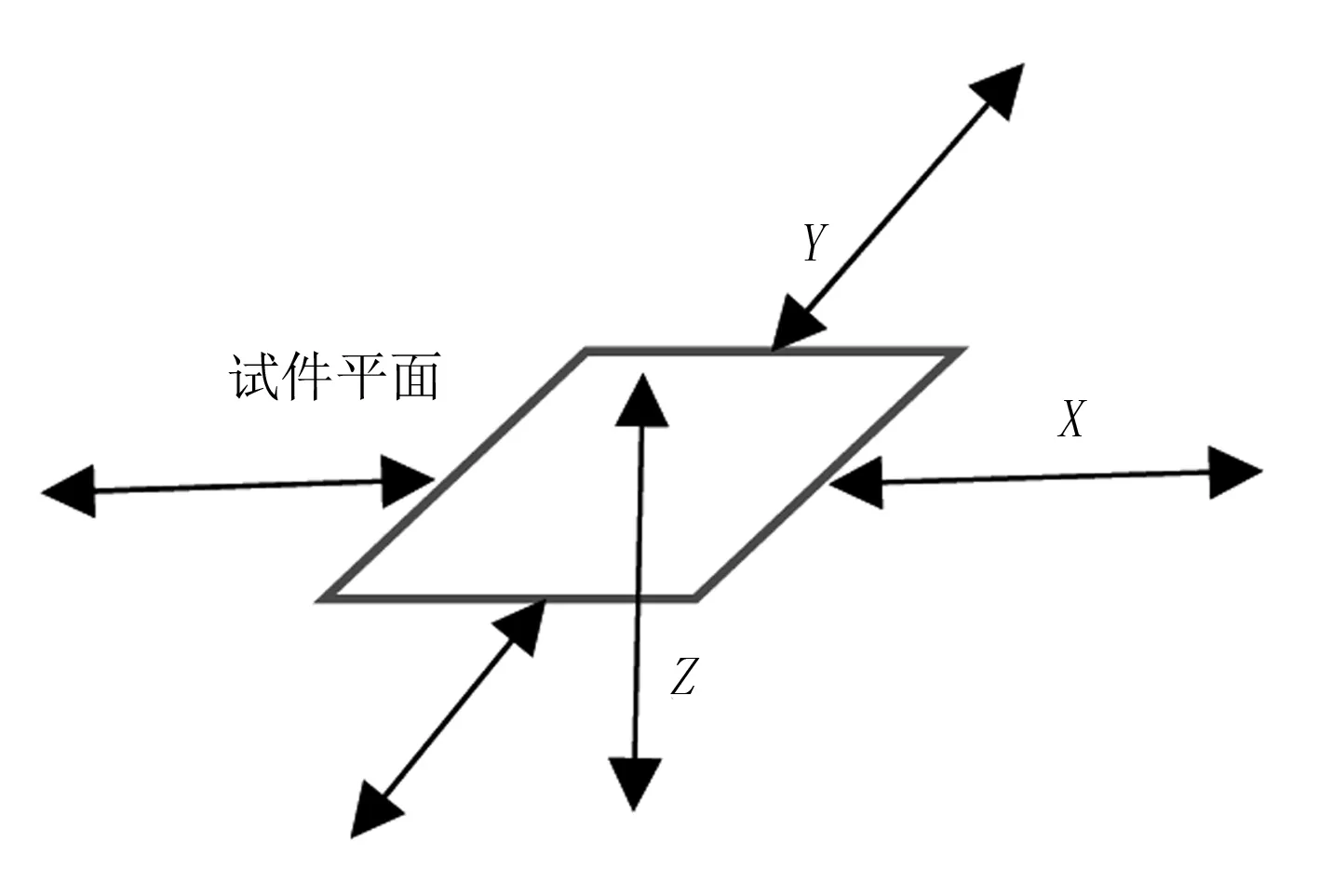
圖2 3軸振動試驗臺工作示意圖Fig.2 3-axis vibration test bed
2.1.2 飛行控制軟件系統可靠性能測試
軟件可靠性能測試是指在模擬環境下為檢驗軟件是否達到所指定的可靠性要求所進行的一系列測試動作[50-51]。軟件可靠性能測試主要可以分為覆蓋性測試和故障注入測試。覆蓋性測試通過對飛控軟件的文檔、源代碼和運行程序等各個方面進行測試,從程序的覆蓋率中找出相對應的程序出錯率,根據出錯率的大小來判斷被測試軟件的可靠性程度[52-53]。覆蓋性測試的優點是對軟件測試的覆蓋率廣,但是所有的實時軟件都對硬件具有極強的依賴性。由于飛控軟件的開發過程是在宿主機上完成的,因此目標機與宿主機的硬件環境的差異導致的軟件錯誤是很難檢測出來的。故障注入測試是采用隨機性測試和選擇性測試相結合的方式將故障測試注入被測試軟件,在仿真環境下運行目標程序,采集測試數據,分析這些測試信息進行軟件可靠性模型的參數估計,并得到被測飛行控制軟件的可靠性能結果[54-55]。故障注入測試是測試軟件魯棒性的有效方法,對軟件的容錯能力設計是一種嚴格的考驗,但因為有太多類型的故障及太多途徑導致程序執行發生故障,不可能注入所有的可能的故障,因此故障注入測試對整個飛控軟件可靠性測試是不完整的。
人工智能技術正在重塑新聞出版行業。人工智能在新聞選題、內容撰寫、編輯加工、校對、發行傳播等方面得以應用,使得出版流程實現智能化。借助機器學習、深度學習、自然語言處理、文本生成等新興算法,人工智能可以將語音實時正確地轉錄成文字,還可以自主寫出新聞報道并編輯加工,大大提高了新聞的生成速度和編校速度;基于大數據分析技術,人工智能可以了解用戶偏好,從而實現推送內容的個人定制,向用戶推送其感興趣的內容。
2.1.3 系統可靠性能測試
目前,用于植保無人機系統可靠性測試的方法并不多見。由于對于無人機來說,可靠性能一般為一定置信度下的飛行可靠度,其飛行試驗只有成功或失敗兩種結果,且每次飛行試驗結果在統計意義上是獨立的,不受其他試驗結果的影響。無人機系統的可靠性能測試符合成敗型二項分布,因此植保無人機系統可靠性能測試主要是通過在多次試驗飛行架次中統計飛行成功架次或者在一定的飛行試驗時間中統計出現的飛行故障數來評估無人機整機系統的可靠性能[56],如通過5×7(每天飛行5個架次,持續7天)或10×7(每天飛行10個架次,持續7天)等實戰試驗來評估無人機系統的可靠性能。此種測試方法的優點是接近實戰環境,能驗證配套設施;但存在樣本太少、受人的操作一致性影響太多、數據利用不充分(只有簡單的故障記錄)、計算方法不規范(不具有可比性)的缺陷。若加大樣本數,投入巨大,時間太長,需要更多的基礎試驗支持,不適合可靠性能長久測試。
2.2 抗風性能指標測試
無人機的抗風性能指標測試是基于飛機在不同等級風的環境中位置控制的思路和方法[57]。目前,測試方法主要有單邊掛重物試驗和風場模擬試驗。單邊掛重物試驗是在飛機飛行時通過在飛機的某一側機臂掛上相應的重物,來模擬飛機在飛行時受到陣風干擾的情況下而產生的力及力矩[58],然后觀察和獲取飛機傾斜角度的平均大小和飛機晃動到平衡所需的時間長短,來測得該測樣飛機抗風性能的好壞。單邊掛重物試驗是最基本的抗風性測試方法,也是最簡單的測試方法,但是此種測試方法比較粗糙,測試結果極不準確且容易摔機。風場模擬試驗是在模擬飛機飛行環境(即在飛機的航程及航線推算中引入風場數據后),測量出飛機飛行的位置和航線,再模擬推算出飛機在無風環境下所飛行的位置和航線[59-60]。通過比較引入風場數據所得的飛機位置和航線與無風環境所得的位置和航線差來評估被測試無人機的抗風性能的好壞。風場模擬試驗是目前無人機抗風性能研究中一種應用較多的方法,雖然在飛機的航程中引入了風場數據,但由于風場種類復雜,模擬風場與實際風場有很大的區別,抗風性能測試結果精度并不高。
2.3 載荷性能指標測試
植保無人機的載荷性能測試方法主要有載荷估算法、載荷計算法和重物累加法。載荷估算法是根據飛機的起飛質重來估算飛機的有效載荷[61-62]。統計顯示,無人機的有效載荷一般占起飛質重的4%~17%[63],有效載荷質重會隨著起飛質重而發生變化。估算法的優點是快捷簡便,不需要復雜的設備或方法就能較快地得出飛機的有效載荷,具有一定的參考意義;但估算法得出的結果只是估計值,對于要求嚴格的植保無人機來說,估算所得的載荷值不僅不能讓植保無人機的作業效率得以充分利用,而且估算不當容易造成摔機炸機事故的發生,并不能作為準確的實際載荷使用。載荷計算法又分為單旋翼無人機載荷計算和多旋翼無人機載荷計算[64-65]。其中,單旋翼無人機的有效載荷主要要根據大槳的長度及截面形狀、發動機功率、空機質重來計算;多旋翼無人機的有效載荷主要是根據單個電機和旋翼的有效拉力、電機個數及空機質重來計算,即
FP=n·F1-m0g
其中,Fp為無人機的有效載荷;F1為單個電機拉力;n為電機個數;m0g為空機質重。
載荷計算法能彌補估算法的缺點,得出較為準確的載荷值,但目前無人機市場上多種多樣無人機機型、電機及槳的出現,使載荷計算變得復雜且工作量大。重物累加法是在飛機起飛前給飛機掛載重物,通過逐漸累加重物的質重直至飛機不能正常飛行為止。重物累加法是目前無人機生產廠商應用于植保無人機載荷測試中最多的一種方法,但此種測試方法在超重時存在較大風險,對無人機操控手的專業性要求比較高。
2.4 振動性能指標測試
無人機的振動性能主要是通過振動信號的大小來體現的[66-67]。目前,測量飛機振動信號主要是通過兩種方法來實現:一種是試驗臺測試,另一種是傳感器測試。試驗臺測試是將無人機的某一部位通過夾具固定在搖擺試驗臺上,正常控制無人機飛行的一些動作,通過試驗臺的振動情況來衡量飛機振動性能的好壞[68-70]。試驗臺測試方法簡單,能明顯地觀測到飛機的正常振動信號大小,但植保無人機在戶外飛行過程中存在大量異常振動,該種測試是通過固定飛機測試部位來實現的,因此試驗臺測試是無法觀測到飛機飛行過程中的異常振動。傳感器測試則是在飛機的機身、機臂等多個不同部位安裝振動加速度傳感器,利用設備完成對飛機正常飛行過程中傳感器信號的采集[71],然后分析采集到的數據來評估被測無人機的振動性能的好壞[72-73]。傳感器測試是在真實的飛行環境中來測試飛機振動信號,是目前最為常用的一種測量振動信號的方法,精度高,范圍廣,能測量出機身及機臂等多處的振動信號;但是傳感器測試時難以保障測試的多種無人機在相同的環境及相同的航線進行測試,因此對不同的飛機所測得的振動性能指標結果是有區別的。
2.5 噴施作業性能指標測試
2.5.1 霧化性能指標測試
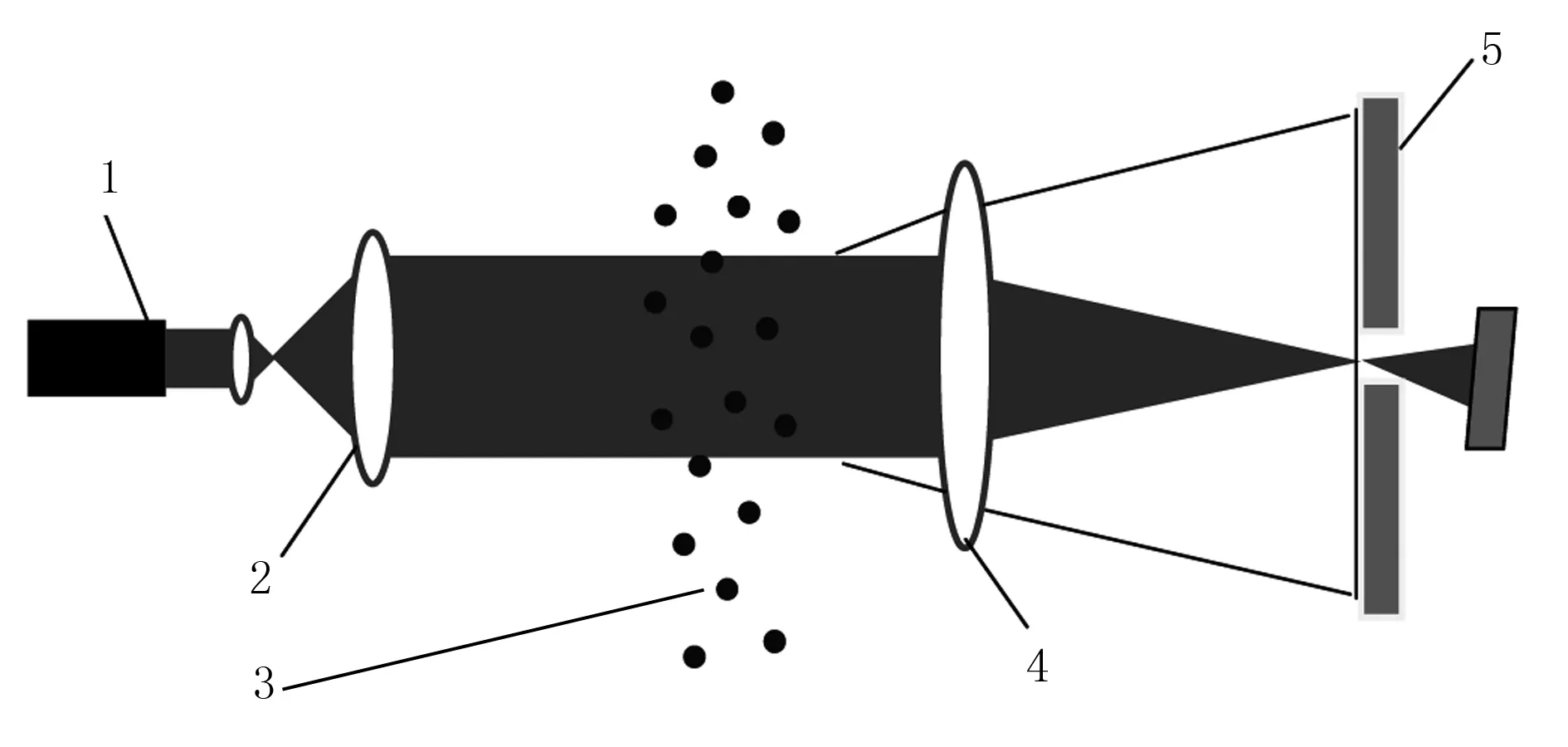
1.半導體激光器 2.擴光鏡 3.測試霧滴 4.富氏透鏡 5.光電接收器陣列
2.5.2 作業質量性能指標測試
目前,單位面積霧滴沉積量的測量方法主要有圖像測量法和洗脫測量法。圖像測量法是指通過霧滴在試樣的吸收表面而產生斑點,如水敏紙 (Water Sensitive Paper, WSP),根據圖像處理技術測量出斑點的直徑和霧滴覆蓋密度來計算單位面積的霧滴沉積量[43,81]。計算公式為
DR=5.23×10-8×VMD3×Dd
其中,DR為單位面積的霧滴沉積量(μL/cm2);VMD為霧滴體積中值直徑(μm);Dd為霧滴覆蓋密度(個/cm2)。
圖像測量法方法簡單,但由于霧滴在試樣表面存在鋪展及斑點形狀不規則等問題,導致圖像測量法精度不高;洗脫測量法是指對添加了某種示蹤劑的藥液進行噴施作業,并對沉積在作物表面的藥液用一定體積的蒸餾水洗脫成溶液,通過光學儀器測量其吸光度換算成單位面積的霧滴沉積量[82],具有精度高的特點,但測量過程復雜,且時效性要求高。
霧滴覆蓋密度測量方法主要有人工計算法和圖像計算法。人工計算法是指人工計算出霧滴在單位面積的試樣吸收表面上而產生斑點數[83],簡單直接,但耗時耗力,且容易產生人為誤差;圖像計算法是指通過圖像處理技術對試樣吸收表面上的斑點圖像處理而得出霧滴的覆蓋密度[84-85],方便快捷,但當霧滴密度過大時,圖像處理技術難以解決霧滴斑點重疊的問題。
均勻度則主要是通過計算霧滴沉積(沉積量、覆蓋密度)的變異系數來計算[86],公式為
其中,S為同組試驗采集樣本標準差;Xi為各采集點內霧滴沉積值;X為各組試驗采集點霧滴沉積的平均值;n為各組試驗采集點個數。
2.5.3 作業效率性能指標測試
目前,植保無人機的作業效率性能指標測試方法比較單一,也是最為經典的計算方法,主要是通過計算植保無人機在單位時間內所完成的有效噴施面積,計算公式為
η=S/t
其中,η為植保無人機的作業效率;S為無人機的有效作業面積;t為作業時間。
3 存在的問題及研究展望
3.1 性能測試規范化問題
目前,各大無人機生產廠家及研究機構仍然用各自的設備及方法來測試植保無人機的某些性能指標。不同的測試設備及方法所測得的飛機性能指標結果必將有區別,目前市場上的植保無人機的參數各異,不排除一些生產廠家對自己生產的飛機只會讓一些有利的性能參數呈現在用戶面前。這種“揚好藏壞”的做法將會誤導飛機用戶在飛機作業方面的選擇,嚴重阻礙無人機在農業應用方面的推廣和發展。隨著無人機技術的快速發展,未來植保無人機用戶的需求將會更大,應用將會更廣,因此必須盡快建立起與無人機綜合性能指標測試相關的規范制度。在未來的幾年里,無人機性能指標測試結果的規范化問題將會是推動無人機市場化發展的決定性因素。
3.2 性能測試精度問題
一直以來,試驗結果的精度問題都是測量和測試領域的重點和難點。無人機在各大領域廣泛應用,其性能指標測試精度問題的重要性更是不言而喻。現階段,農用無人機綜合性能指標的主要測試方法都是在一定的環境中通過采集和分析傳感器的信號來得出無人機相應的性能指標。首先,由于測試環境和實際作業環境的不同,在測試環境中測得無人機的綜合性能指標結果與實際環境中無人機的綜合性能指標將會有一定的差距。如無人機的抗風性能指標測試,模擬環境與實際環境的差別將導致測試結果的不同,抗風性能也會有一定程度上的差距。其次,無人機綜合性能測試精度完全取決于相應傳感器的精度及傳感器信號的分析和處理。因此,隨著性能測試規范化的加強,性能測試精度也需要有一定程度的提升。
3.3 性能指標完善化問題
植保無人機作為一個復雜的作業搭載平臺,主要包括飛行控制系統和機身兩大部分,其評價性能指標遠遠不止上述的幾種指標,還包括植保無人機的動力系統性能指標、整機設計性能指標等。隨著無人機在農業應用領域的擴展,將會有更多的性能指標被重視和測試。現階段的植保無人機綜合性能指標測試設備及方法將不能滿足未來的植保無人機性能指標測試要求,更多的植保無人機性能指標測試的設備及方法將被提出和設計,無人機的綜合性能指標測試技術將會得到更大的發展,為未來無人機的發展和推廣起到明確的指導性作用。
3.4 性能測試自動化水平問題
目前,人們已經開發了大量與無人機性能指標測試相關的測試工具及方法,但就現階段而言,測試工作還需要較大的人為參與。未來無人機的大量需求和研發,將會導致無人機大規模化生產和發展。植保無人機的各項性能指標測試也將會是一項非常復雜繁瑣、工作量較大的工作,需要經過一系列復雜的處理,這將嚴重阻礙新型植保無人機的研發和發展。因此,必須著力提高無人機綜合性能測試工作的自動化水平,這對無人機在各個領域的發展都有著極其重大的意義。
4 結論
通過對當前植保無人機綜合性能指標中的可靠性能指標、抗風性能指標、載荷性能指標、振動性能指標和噴施作業性能指標等5個主要性能指標的測試方法的現狀分析,得知現階段植保無人機性能指標的測評工作還存在的問題有:性能測試指標缺乏規范化引導,性能測試精度達不到市場要求,性能測試指標不夠完整,性能測試過程自動化程度低。隨著微電子技術和新型材料制造技術的飛速發展,未來的植保無人機性能指標測評體系應該是一套自動化程度高、安全及性能測試規范及精度高的完整體系。
植保無人機性能指標測評是對植保無人機的機身結構和軟件性能進行綜合評定的一項工作,它不僅是植保無人機作業質量保證的關鍵步驟,而且對未來無人機在農業應用領域的設計及開發更有著極其積極的指導意義。
對無人機在農業應用領域的研究和應用是一門相對較為新興的學科,隨著將來植保無人機的大量出現和應用,人們對植保無人機的各種性能指標測試指標將會越來越重視,植保無人機的性能指標測試將成為無人機發展過程中的一項必不可少的工作。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
環球時報(2022-05-30)2022-05-30 15:16:57
天天愛科學(2020年6期)2020-09-10 07:22:44
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
當代陜西(2019年11期)2019-06-24 03:40:28
數學物理學報(2017年6期)2018-01-22 02:26:40
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
小學生導刊(低年級)(2016年8期)2016-09-24 22:09:04
故事大王(2016年7期)2016-09-22 17:30:08
計算物理(2014年2期)2014-03-11 17:01:44
