糯扎渡電站一次調頻合格率提高淺析
2018-08-07 06:34:00浦恩任
水電站機電技術 2018年7期
李 青,浦恩任,秦 磊
(華能瀾滄江水電股份有限公司集控中心,云南 昆明650300)
0 引言
監測和控制電網頻率是保證電力系統穩定運行的主要任務之一。因為電力系統頻率會隨著電網負載改變而改變,所以按照中國電網頻率數值一般就是50 Hz,通過發電機組的調速系統和電網AGC系統,可以實時調節能源側的供電,來適應負荷側電力的變化,實現發電和電力消耗之間的平衡,使電網的頻率保持在接近50 Hz的允許范圍內。
調速器的主要任務是在單機帶負荷時根據偏離機組頻率(轉速)額定值的偏差,調節水輪機導葉機構,調整汽輪機導葉機構,保持機組輸出功率與功率消耗的平衡,使機組的頻率盡可能保持在額定值附近的允許范圍內,避免一次調頻動作不合格導致的電量考核。糯扎渡電站機組主要存在導葉大開度時,導葉動作量不足一次調頻的調節受影響,進而導致一次調頻考核。
1 影響一次調頻的因素
我國電力發電運行的主要管控裝置含有調速器系統。調速器系統主要任務是負擔整個機組的開機、關機、調節負載、調速等多項任務。機組的一次調頻的管控與調整是由該系統獨立實現的。在該系統進行調整過程中,不管是動態、靜態的特點還是調整的質量都和該系統所設定的調速器參數的設定息息相關。最近幾年,由于科技技術的飛速發展,我國在調速器的生產水平與技術這兩方面發展的速度很快,所以該設備不但持續研發了新的構造,而且完善和加強了管控方法和調整方式。當前,調速器的參數設置主要有下面幾個,如:微分增益、比例增益、人工死區、積分增益和永態轉差率等等。因為這些參數的設置會極大改變電機組的一次調頻能力,所以如果參數的設置不匹配的話,那么電機組的第一次調頻不能達到預期的能力,嚴重造成反調整,甚至造成電網事故。
調速器參數設置的大小和每一個機組能否調節到該系統變成負荷的能力有緊密聯系,相當于對該系統頻率的調整能力。要想達到系統的頻率調整能力強的效果,就必須使永態轉差率數值變小。同時,如果機組的容量在整個系統中占很重的比率時,那么參數的設置對電網頻率的影響就很大。我國當前采用的微機調速器機組可以對這個進行參數設定。但由于水輪機組的出力與水頭有很大關系,若水頭不同,水流慣性導致機組的慣性調節即使永態轉差率相同,機組的一次調頻性能會出現很大的區別,因此在調節水輪機組調節器時要關注水頭的問題。
調速器人工頻率死區的設定。如果在死區出現系統頻率變化的時候,不但要人工在調整單元的靜態特性上設定頻率死區,而且系統頻率變化時機組的頻率調整不跟著變化,以致于達到保持固定的負載不變的目的,讓機組的基本負載更加穩定。因此,必須綜合考慮人工頻率死區的設置。如果死區設置太小,則不利于機組的穩定性,而且死區太大,則不利于發揮機組的第一調頻功能。
運行模式參數指當電網系統中產生較大頻率波動時影響調速器運轉的運行模式的變換參數,也就是當系統頻率變動到某個限制數值時,調速系統的模式變換到速度調節系統出廠時。該參數由制造商給出一個默認值,并且該默認值充分考慮保護機組在過頻率波動過大或過小時受的影響,但在系統故障的情況下,電廠進入孤島模式或在系統中負擔主要負載時,系統中容積較大的發電廠將擔起調整系統頻率波動的責任,所以設定參數尤為重要。
一次調頻參數的設定關系到機組的穩定性。如果人工頻率死區所制定的范圍很廣泛,那么調差系數就會很大,這樣的話機組的穩定性也會大大的加強,但奉獻給電網一次調頻的能力就不高。所以對于一次調頻參數的制定要與機組的穩定情況相結合,同時要充分的考慮到一次調頻的快速反應能力標準。當前務必要強化并網機組調速系統及其相關參數的設定與管控,達到機組的聯網運作的要求,不然將對電網和機組在事故發生時的安全運行有不確定的因素存在。
2 一次調頻的考核計算
2.1 考核標準
對于如何考核一次調頻考核算法?現在主要是采用并網發電機組的方式,依次考核機組的一次調頻投運率和動作的準確率。分開評估機組的一次調頻投運率與其動作的正確率,達到考察對象的目的。首先一次調頻動作方向和電網頻率要求的方向必須保持一致,另外實現理論上面的數值的相對比率;如果在考核和核算一次調頻的評價時,要考慮到不同種類的、不同型號的機組自身的性質,不僅需要在電腦機組的實際操作積分電量時合情合理的制定出死區,而且需要考慮和參照整個機組能力不足的狀況,如機組在超負載工作時等等[1]。
對服務年限長、人工依靠程度高、或者將被政府關停或經過技改仍不達標的電站機組,倘若被一些電力監管機構認證和批準以后,這些一次調頻機組其考核的方式就依照下面的公式進行考察:
機組當月一次調頻考核金額=(上月考核總金額÷上月參與考核總裝機容量)×機組額定容量×μ。μ在0.1~0.5之間進行取數。
2.1.1 考核時段
以15 min為一個考核時段,按月統計考核電量,年度匯總。
2.1.2 考核原則
如果想要依照一次調頻運行的時間總計就要進行一次調頻投運;
如果根據次數進行考核就要一次調頻動作。
2.1.3 基礎源數據
實時機組出力信息主要被使用在計算電力工廠真正的出力曲線;
機組實際出力限值信息:用于對因調節能力不足造成的動作不合格給予免考;
系統實時頻率信息:用于描繪系統頻率實時波動,統計應動作次數;
機組一次調頻投運信息:用于統計機組一次調頻投運時間;
AGC動作指令信息:用于對因AGC動作造成的一次調頻不合格時段給予免考[2]。
2.1.4 考核算法
下面我們用機組k第i次動作為例子,來看看考核的計算方法評價。
一次調頻月度合格率計算方法公式如下:
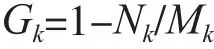
其中,Mk是一次調頻進行動作次數;Nk是機組k不符合規定的次數(只取參加了一次調頻動作的評估總數)。
如果月度計算次數擁有下面的所有情況,那么就可以稱為一次調頻應動作次數Mk,水電機組和火電機組是不一樣的:
持續時間超過動作延時(15 s);
電網頻率過動作死區(火電機組>0.033 Hz,水電機組>0.05 Hz);
電網頻率過動作死區最開始的15 s都屬于死區范圍里。
如果頻率波動包括下面的情況,那么機組將面臨再一次的調頻動作考核和核算:
持續時間超過動作延時(15 s);
電網頻率過動作死區(火電機組>0.033 Hz,水電機組 >0.05 Hz);
中間的頻率峰值超出評估門檻(>0.05 Hz);
電網頻率過動作死區最開始的15 s都屬于死區范圍里。
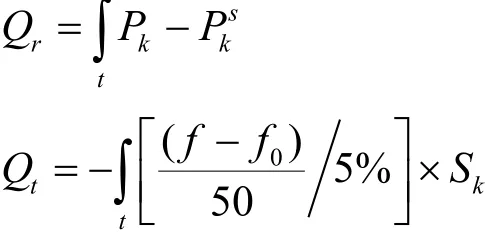
機組一次調頻動作的積分電量Qr達到理論動作積分電量Qt的一半判為動作合格,那么我們進行如下計算:
積分起始結束時間選取方法如下:

圖1 考核計算選取圖
頻率過一次調頻動作死區為a點,此時對應時間為t3,過考核峰值門檻后的最大值為c點,此時對應的時間為t0,頻率復歸點為e點,此時對應時間為t4,以t0時刻偏中心向兩邊延展30 s,記為t1點和t2點,分別對應頻率點為b點和d點,則一次調頻的考核時間段算法如下:
①滿足t4-t3>60 s,考核時間為從t3到t4之間。
②滿足t3<t1且t2<t4,考核時間從t1到t2之間。
③滿足t4-t3>60 s且t3>t1且t2<t4,考核時間從t3到t3+60 s之間。
④滿足t4-t3>60 s且t3<t1且t2>t4,考核時間從t4-60 s到t4之間。
評估有效的積分是指起始功率為t3點對應的功率,而非考核起始點時的發電機功率。頻率回到死區超過3 s,即可認為本次考核結束[3]。
2.2 免考計算方法
存在AGC指令干擾的一次調頻動作不合格自動免考,算法如下:

①Φ代表空集;
②τi1為免考標志;
③ta1為一次調頻動作期間或之前20 min內存在AGC指令的動作起始時間;
④ta2為該AGC動作結束時間;
⑤tp1為一次調頻動作起始時間;
⑥tp2為一次調頻動作結束時間。
如果因為機組在額定容量或者最小技術出力周圍運行,那么沒有辦法滿足一次調頻動作而要求自動免考,算法如下:(根據理論動作幅度判斷死區)

無調節能力水電機組、燈泡貫流式水電機組低于70%額定水頭。如果一次調頻動作所處時段機組水頭低于額定水頭70%,則該條一次調頻動作免考。
非電廠原因導致電廠和電網兩側頻率、功率測量存在明顯不一致造成考核不合理:人工設置。
非電廠原因造成一次調頻不合格,該時段不計算投運率:人工設置。
供熱機組由于當前供熱量發生正負15%及以上突變導致的考核:根據上報的供熱機組供熱量發生正負15%的時段,判斷處于該時段的一次調頻動作免考[2]。
本次動作是否免考,計算方法:

最終,統計機組k月度考核電量Qk:

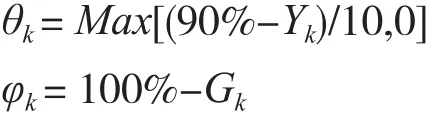
其中,Yk為一次調頻投運率。
3 糯扎渡電廠一次調頻的調節模式
在機組并網前空載狀態,調速器控制機組跟蹤頻率給定值使用頻率模式調節,使機組能快速達到預定頻率。機組并網后,默認開度模式為控制模式,調速器控制機組跟蹤導葉開度給定值。并網后一次調頻主要由監控系統來完成,監控系統通過AGC來反映當前機組有功設定值和機組功率反饋值,來計算兩者差值,然后換算成相應的增、減調節脈沖命令給電調。此時,調速器作為一個隨動系統變化接受監控系統發來的增、減脈沖命令來調整機組有功,從而達到有功調節的目的。

圖2 一次調頻配合原理框圖

圖3 一次調頻原理框圖
PID調節框圖稱為頻率主環,BP為調差系數,空載時,BP和死區都為零,PID調節參數采用空載參數,并網時,BP和死區為設定值,PID調節參數采用負載參數,功率通常由監控系統來調整,直接作用于導葉位置輸出,右邊的PI調節框圖稱為導葉副環,它是由軟件來管控導葉閉環,最后控制輸出就是對應導葉偏差的增量信號。該信號經過模擬數字轉換后傳輸給電液轉換器。
空載時,BP為零(BP為零的目的是因為要調整頻率到目標值,這樣開度需要一個寬泛的調整范圍和速度性,如果BP設有一定的數值,如果過大會造成導葉調節不到位的情況),死區為零(因為是頻率為控制對象,所以要控制極度精準,所以不能設有死區,如果有死區,即不能設置精準的目標值),PID調節參數就使用空載參數[4]。
并網時,BP和死區為設定值,PID調節參數采用負載參數,功率通常由監控系統來調整,直接作用于導葉位置輸出,導葉給定有三部分組成:Gv_Give=Pgv+Ynld+Ypid(公式 1)
Pgv為監控脈沖功率給定(內部折算出的導葉開度,是監控增減功過程中逐步疊加的一個導葉開度給定);程序內部實現是以公式2進行:Pgv=Pgv+Trp/100(公式 2)
Ynld為空載開度;該空載開度為定值,每個水頭下都對應一個相應的空載開度,以滿足開機,空載控制需要。舉例糯扎渡電廠空載開度和水頭對應關系如表1:

表1 一次調頻對應各水頭下的導葉空載開度
Ypid為根據頻差計算出的PID輸出的開度。程序內部計算靠公式Ypid=Yp+Yd+int(Yi/20000)計算。
4 具體實施步驟
4.1 對調速器進行導葉開度試驗
當機組在發電態,導葉開度設置不同參數時檢查開度,在調速器參數中輸入各個試驗導葉開度量,試驗步驟如下:
在7號機組調速器電氣柜進行一次調頻模擬試驗,PID輸出未設置2%疊加量。在70%導葉開度附近試驗數據如表2:

表2 70%導葉開度試驗數據
在7號機組調速器電氣柜進行一次調頻模擬試驗,PID輸出未設置2%疊加量。在90%導葉開度附近試驗數據如表3:

表3 90%導葉開度試驗數據
對應導葉開度曲線如圖4:

圖4 導葉大開度對比圖
試驗結果:當機組在發電態,導葉開度設置不同參數時檢查開度,在調速器參數中輸入各個試驗導葉開度量,試驗表明,導葉開度正確。
4.2 對調速器程序修改設置疊加量
對調速器電氣柜上對調速器程序中進行控制邏輯修改,當導葉開度大于92%時,一次調頻動作,導葉給定自動疊加一定開度后再次進行試驗(見圖5、圖 6、表 4、表 5)。

圖5 程序未設置疊加量
5 結束語
通過對比導葉設置疊加量前后的導葉動作量,發現導葉開度在95%以上時設置疊加量后導葉動作量明顯增加,符合了我們機組調節的相關要求,并且PID輸出已經有了設置疊加量,滿足一次調頻考核要求。

圖6 程序設置疊加量

表4 95%未設置開度疊加量

表5 95%設置開度疊加量
猜你喜歡
動漫界·幼教365(大班)(2021年4期)2021-05-23 21:33:16
童話世界(2020年10期)2020-06-15 11:53:22
當代陜西(2019年9期)2019-05-20 09:47:40
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文周刊·小學一年級版(2016年28期)2017-06-03 00:28:49
影劇新作(2017年4期)2017-03-22 05:47:21
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
中國衛生(2016年2期)2016-11-12 13:22:24
少兒科學周刊·少年版(2015年4期)2015-07-07 20:56:37