多軌道馬賽克自動鋪貼機(jī)設(shè)計(jì)方案的缺陷分析及改進(jìn)措施*
2018-08-03 01:49:22羅啟榮
機(jī)電工程技術(shù) 2018年6期
關(guān)鍵詞:分析設(shè)計(jì)
官 峰,羅啟榮
(1.佛山科學(xué)技術(shù)學(xué)院機(jī)電工程學(xué)院,廣東佛山 528000;2.廣州數(shù)控設(shè)備有限公司,廣東廣州 510165)
0 引言
馬賽克自動鋪貼機(jī)(后文簡稱鋪貼機(jī))的研究開發(fā)一直是建陶機(jī)械關(guān)注的議題。以“馬賽克”為關(guān)鍵詞在中國專利網(wǎng)上可檢索數(shù)十條專利信息,最早的記錄始于1991年。最近幾年呈現(xiàn)密集性報(bào)道,如文獻(xiàn)[1]~[12]都是近幾年的研究開發(fā)成果。從現(xiàn)有專利和學(xué)術(shù)論文所報(bào)道的內(nèi)容來看,目前鋪貼機(jī)的主體設(shè)計(jì)大體可以分為兩類:一是基于機(jī)械手加吸盤抓取顆粒的,二是基于送料裝置加多軌道落料的。例如,文獻(xiàn)[1]、[8]、[10]報(bào)道的屬于第一類,文獻(xiàn)[2]、[3]、[4]、[6]、[7]報(bào)道的屬于第二類,而文獻(xiàn)[5]、[9]則屬于二者混合型。
第一類鋪貼機(jī)系統(tǒng)設(shè)計(jì)復(fù)雜,加之機(jī)器人或機(jī)械手的高成本,在國內(nèi)鮮見成功應(yīng)用的報(bào)道。第二類鋪機(jī)在自控部分的設(shè)計(jì)相對簡單一些,多利用螺旋送料盤送料及軌道或者滑道落料,成本較低;基于現(xiàn)有技術(shù)實(shí)現(xiàn)的可能性大。鑒于這樣的考慮,筆者重點(diǎn)關(guān)注了第二類鋪貼機(jī)的設(shè)計(jì)開發(fā)。通過分析現(xiàn)有文獻(xiàn)報(bào)道的技術(shù)設(shè)計(jì),筆者發(fā)現(xiàn)一些設(shè)計(jì)存在一些需要商榷的地方。本文給出相關(guān)的分析和探討。
1 問題的提出
文獻(xiàn)[2]、[6]是比較典型的多滑道落料的設(shè)計(jì)。但是筆者發(fā)現(xiàn)這些文獻(xiàn)大多建立在直觀想象的基礎(chǔ)上,缺乏對落料過程的分析。例如這些都宣稱采用多滑道以提高鋪貼效率。文獻(xiàn)[6]還給出了三維設(shè)計(jì)模型,如圖1所示。所有文獻(xiàn)均沒有給出送料口附近的詳細(xì)設(shè)計(jì)說明。事實(shí)上,這樣的設(shè)計(jì)存在問題,無法實(shí)現(xiàn)預(yù)期功能。文獻(xiàn)[11]分析了圖2設(shè)計(jì)的不足。這里進(jìn)一步分析其他幾種情況。
在螺旋送料裝置的出口銜接一個一分多的滑道,可簡化為圖2所示的幾種情況模型。圖2中,平口布局(a)是指落料滑道中軌道的上部邊緣分布在一條線段上呈平口,倒V布局(b)是落料滑道中軌道的上部邊緣沿中心線對稱分布在兩條斜線段上呈現(xiàn)倒寫V字型,凸弧布局(c)是落料滑道中軌道的上部邊緣沿分布在一個開口向下的圓弧上。

圖2 多軌道可能的布局示意圖
需要指出的是,鑒于馬賽克顆粒從進(jìn)料口落入多滑道后呈隨機(jī)運(yùn)動狀態(tài),大致服從布朗運(yùn)動規(guī)律,藉以重力和摩擦力的作用,其他情況的多滑道設(shè)計(jì)如V形布局或凹弧布局很難有顆粒落入兩側(cè)的軌道。因此,圖2的幾種布局是合理的可選布局。以下說明,即便是這樣,圖2的布局也是無法使得每個軌道都能夠等概率地落入馬賽克顆粒。
先取圖2(a)分析。根據(jù)文獻(xiàn)[2]、[6]的設(shè)想,顆粒從送料口落入滑道后,在重力的作用下沿滑道下滑,隨機(jī)進(jìn)入其中一個軌道后繼續(xù)下滑。事實(shí)上,根據(jù)能量原理,在僅有重力作功的條件下,顆粒會沿著重力方向滑落。考慮到滑道十分光滑,其摩擦力忽略不計(jì),可以推斷,大量的顆粒會集中在中心線附近軌道而少有顆粒移動向靠近兩側(cè)的軌道。因此,該設(shè)計(jì)方案不可取。
再取圖2(b)分析。此種結(jié)構(gòu)似有對圖2(a)的改進(jìn)。姑且不考慮倒V底部的位置(太高或者太低都會影響落料),理論上可以作這樣的設(shè)想,當(dāng)顆粒滑落到中心線兩側(cè)的軌道附近時,或者落進(jìn)軌道繼續(xù)滑行,或者與軌道邊緣發(fā)生碰撞彈出后繼續(xù)下落到別的軌道。此種設(shè)想對于單個顆粒滑落時,或許能夠成立。當(dāng)多個顆粒連續(xù)不斷從送料口下落時,“軌道邊緣發(fā)生碰撞彈出后繼續(xù)下落”的幾率陡然下降。從而,多個顆粒聚集在中心線附近軌道的現(xiàn)象仍然無法避免。同樣,該設(shè)計(jì)方案不可取。
圖2(c)的結(jié)構(gòu)與圖2(b)的結(jié)構(gòu)基本一樣,這里不贅述。這里再指出圖2(a)、2(b)、2(c)三種情況的通病:它們都沒有考慮到顆粒在滑落過程中的旋轉(zhuǎn)。假如正方形馬賽克顆粒的邊長為s,那么它的對角線長度為 2s。此時出現(xiàn)一個直接的技術(shù)問題:軌道的寬度取多大合適?取2s+δ的話,顆粒在軌道中會出現(xiàn)多種姿態(tài)的滑落。圖3給出了其中兩種極限狀態(tài):邊平行于軌道邊以及邊與軌道呈45°角。顯而易見,只有平行下落的情況才可能保證顆粒在后續(xù)移動中能落入胎膜上指定的格子。其他情況均屬臆想。

圖3 顆粒下落的兩種極限情況
2 系統(tǒng)改進(jìn)
鑒于前小節(jié)分析多軌道馬賽克自動鋪貼機(jī)存在的問題,佛山科學(xué)技術(shù)學(xué)院王興波教授帶領(lǐng)團(tuán)隊(duì)開展了研究改進(jìn)工作。采用單軌道+2軸CNC運(yùn)動平臺的鋪貼方法可解決前述軌道方面的諸問題。其原理圖如圖4所示。
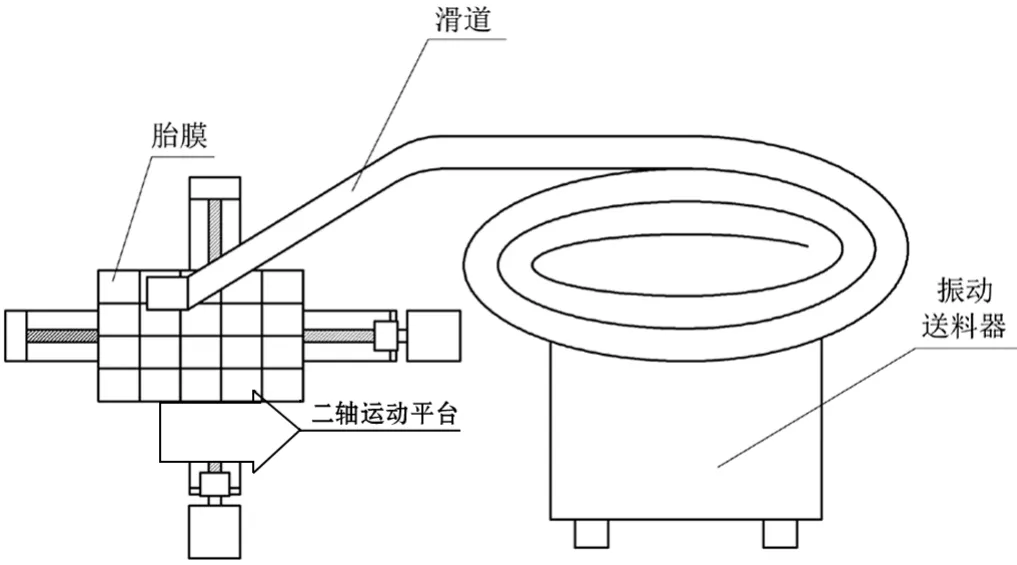
圖4 單軌道+2軸CNC數(shù)控平臺
系統(tǒng)的工作原理是這樣的。螺旋送料盤將顆粒送入軌道,計(jì)算機(jī)控制系統(tǒng)識別出顆粒的顏色后,按照實(shí)現(xiàn)預(yù)設(shè)的鋪貼圖案控制2軸運(yùn)動平臺將對應(yīng)格子移動到軌道出口,控制器放行入選顆粒后,顆粒沿軌道滑行到格子位置。經(jīng)其他后置處理實(shí)現(xiàn)鋪貼。系統(tǒng)的更多技術(shù)設(shè)計(jì)見文獻(xiàn)[11],這里不贅述。值得說明的是,2017年4月,課題組經(jīng)過艱苦努力成功制作一臺自動鋪貼樣機(jī),如圖5。
3 結(jié)論與展望
馬賽克自動鋪貼設(shè)備是一個融合光機(jī)電一體化的復(fù)雜機(jī)電系統(tǒng),既有應(yīng)用價值又有學(xué)術(shù)研究價值。筆者有幸參與了相關(guān)的研究,收益非淺。本文分析和研究的問題,都是在課題組專家教授的指導(dǎo)下取得的,筆者深表謝意。同時需要指出,本文所介紹的僅僅是項(xiàng)目開發(fā)過程中設(shè)計(jì)到技術(shù)問題及其解決方案的一小部分,還有諸多問題如圖像識別、計(jì)數(shù)控制等,都是需要進(jìn)一步完善的。筆者希望拋磚引玉,得到更多好的結(jié)果。
猜你喜歡
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2018年18期)2018-11-14 01:48:24
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
中國中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年11期)2014-08-08 13:23:44
終身教育研究(2014年5期)2014-02-28 01:23:06
