旋翼無人機工業區航測精度與控制點數量關系研究
2018-08-03 02:57:06趙艷玲田帥帥張建勇閆皓月
測繪通報 2018年7期
趙艷玲,田帥帥,張建勇,王 鑫,閆皓月,張 碩
(中國礦業大學(北京)地球科學與測繪工程學院,北京 100083)
工業區一般指各類產業、企業聚集區,地表各種建構筑物較為密集。為了城市和地區的發展獲取工業區高空間、時間分辨率的數字地表模型(DSM)和正射影像圖(DOM)數據非常重要。傳統的獲取DSM和DOM的方法是基礎測量或衛星遙感。全站儀或RTK獲取地形數據雖然精度高,但是耗時費力;衛星遙感效率高,但是精度目前停滯在米級。近年來,無人機技術以其低成本、高精度、高效率等特點,彌補了傳統測量效率低、衛星遙感精度差的缺點,成為航天、航空遙感和地面實測的有力補充手段[1],逐漸應用到各行各業[2-6]。
在測繪方面,利用無人機獲取地形數據的技術已經較為成熟。周高偉等以雙介質攝影測量原理為基礎,利用海島無人機影像開展了航空雙介質攝影測量試驗與分析[7];呂立蕾等用固定翼無人機對研究區進行航拍,提出了無人機航拍成果適用于1∶1000比例尺地形圖精度,但不滿足1∶500精度[8]。針對如何獲取更高質量的數據成果,也有許多學者進行了研究,M R James等研究了控制點質量和相機模式對生成DEM精度的影響[9];Marina Torres等通過對研究區進行不同飛行路徑的設計與試驗,得出了利用無人機進行三維地面建模的最佳飛行路徑[10];買小爭等采用“隔航帶、隔基線”的方法布設像控點,提出了滿足1∶1000數字正射影像圖制作的像控點布設方案[11];陳良浩等針對大面積水域的特殊情況提出了“密周邊,隔基線”的控制點布設方案,最終成果滿足1∶500大比例尺地形圖測繪要求[12];朱進等研究了6種不同的控制點布設方案,最終提出邊角均勻、內部加控的方案能達到最高精度[13]。在這些研究中,許多專家和學者針對控制點布設方案、控制點質量、飛行路徑等方面針對不同應用情況提出討論。但是由于工業區地物覆蓋較為復雜,控制點布設不方便,很多飛行實施方案并不適用。目前,針對這一特殊情況的研究尚不充分。由數學基本原理可知,3個點可以確定1個平面,因此賦予無人機攝影測量坐標系至少需要3個地面控制點,但是否控制點越多精度就越高,這一點尚無定論。況且,對于無人機攝影測量來講,野外工作量大小主要取決于控制點的個數,成圖精度是否隨控制點個數增加不斷上升,或是布設多少個控制點能達到最佳效果就顯得意義重大。本文以旋翼無人機為例,排除其他可能對成果精度產生影響的因素,在山東某礦廠區進行試驗,針對控制點個數的布設提出研究方法并得出結論,對以后相關方面無人機獲取地形地貌數據的實施具有參考意義。
1 研究區與航拍設備
1.1 研究區簡介
研究區位于山東省某煤礦廠區(如圖1所示),東經116°23′45″—116°31′07″,北緯36°26′07″—36°30′57″。廠區長寬為450 m×340 m,面積為15.3 hm2。廠區內建筑物較為復雜,生產設備全天運行,部分生產區和生活區由于保密原因不得隨意進出,給控制點的布設帶來了不便。
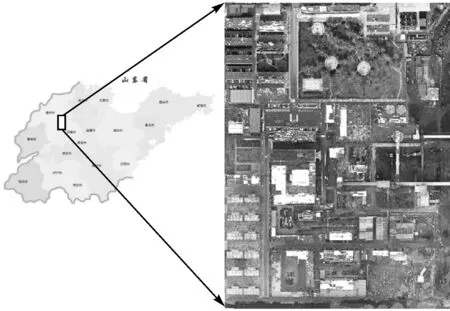
圖1 研究區
1.2 無人機及載荷
目前,世界上已有超過300種無人機,按結構可分為固定翼、旋翼、無人直升機和垂直起降UAV[14]。其中,旋翼無人機以其重量輕、體積小、機動性強等優點應用十分廣泛。本文以大疆經緯M100四旋翼無人機(如圖2所示)為飛行平臺,以Zenmuse X3數碼相機為任務載荷進行航拍工作,平臺與載荷的主要參數見表1。

表1 無人機平臺和任務載荷的主要參數

圖2 M100無人機平臺
2 數據獲取及處理
2.1 航拍影像獲取
在對研究區進行實地踏勘后,選取工業廣場中視野較為開闊、周圍無高大遮擋物的運動場作為起飛平臺。依據《低空數字航空攝影測量外業規范》的要求及航拍任務的實際需要,此次航拍重疊度設置為航向80%、旁向60%,航高設置為100 m,共獲取影像245景,地面分辨率為4.7 cm。航拍當日天氣晴朗,有微風,光照充足。
2.2 地面控制點采集
地面控制點按主要用途分為像控點和檢查點兩種。像控點的布設與量測的主要目的是獲取控制點的物方大地坐標,以及使影像與實測地區產生聯系,以便于投影和影像校正。檢查點的布設與測量工作的主要目的是對最終生成的精度進行評價,直觀地反映出最終產品制作的精度。考慮研究區面積小、精度要求較高,本文選用南方S82型RTK接入礦區當地CORS網,進行控制點的采集。為保證精度,控制點設置觀測2個測回,平滑次數10次,以水平方向20 mm、垂直方向20 mm為收斂閾值,共采集53個控制點(如圖3所示)。

圖3 控制點分布
2.3 影像處理
運動與結構重建(structure from motion,SFM)技術結合了計算機視覺和攝影測量學,可以用從不同高度、不同方向獲取的影像恢復出相應的三維信息,以其更高的靈活性和成果精度被廣泛使用[15]。結合這一技術的許多攝影測量軟件,如Microsoft Photosynth、Agisoft PhotoScan與Pix4Dmapper都已經多次運用于科學研究[16]。
本文選用Pix4Dmapper進行無人機影像的拼接和成果輸出。Pix4Dmapper為瑞士Pix4D公司自主研發的一款全自動快速的無人機遙感數據處理軟件,該款無人機數據與航空影像處理軟件具備全自動、專業、快捷、精度高等特點。該軟件無需相關專業知識和人工干預,即可以將數千張無人機遙感影像進行快速處理,鑲嵌、拼接、空三加密等,生成測區的正射影像圖(DOM)、數字表面模型(DSM)、三維立體模型等專業的、精確的數字產品。工作流程簡單易懂,能夠自動獲取相機參數并對非量測相機進行檢校,更無需IMU數據,自動生成點云數據、DSM、DOM等成果。
從控制點角度出發研究攝影測量成果精度,在采集條件相同的前提下主要通過兩個方面來進行分析,即個數和布設方案。由攝影測量學和數學原理,確定一個平面并賦予坐標系至少需要3個控制點。本文采用逐級增加的方式對控制點個數對精度的影響展開研究。個數以3個起始逐級遞增2個共設置9個等級。為了排除控制點布設方案造成的影響,每個控制點個數等級都設置4種布設方案以得到最可靠結果。最終得到36組控制點布設方案,分布位置如圖4所示。
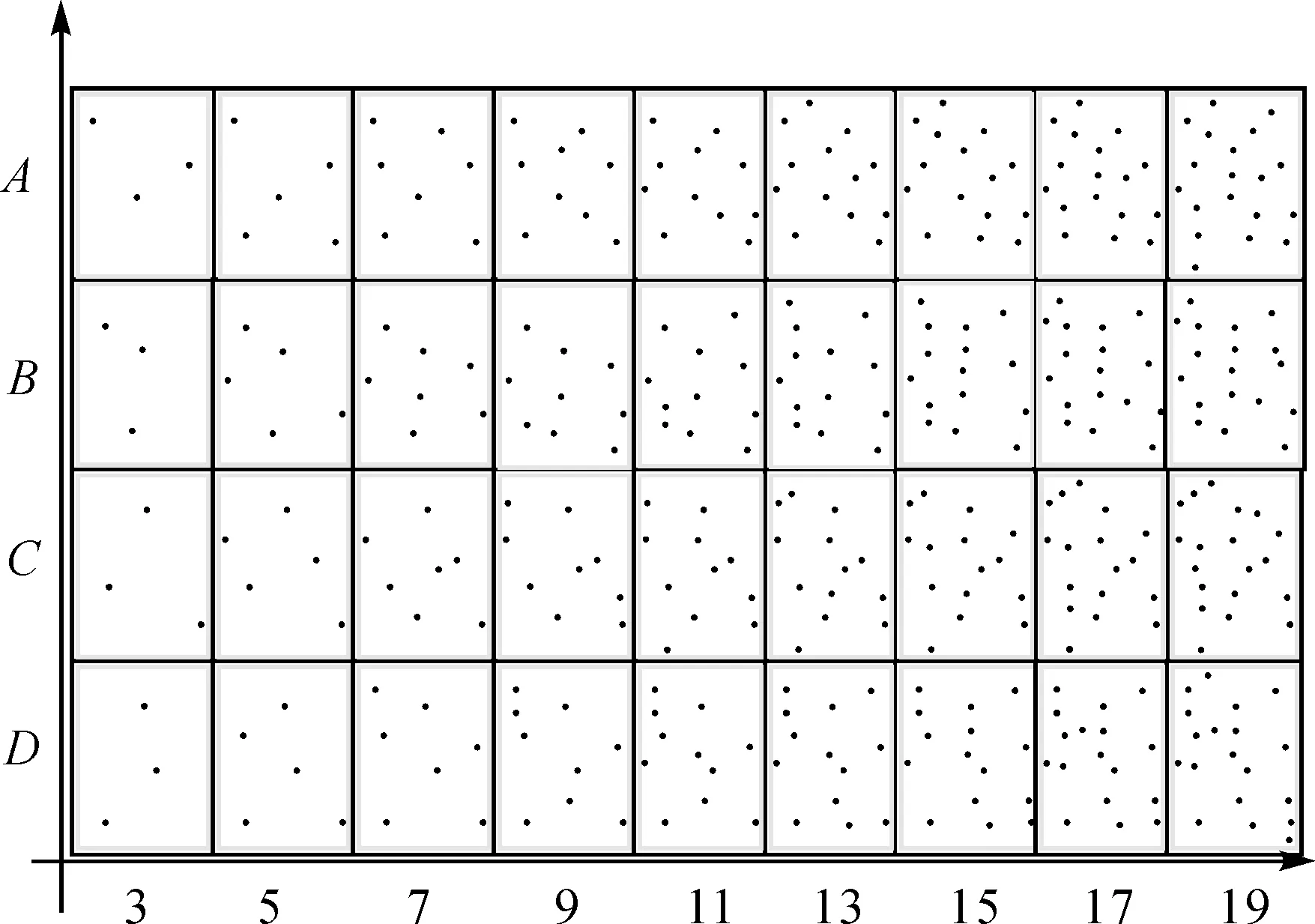
圖4 控制點方案(橫向為控制點個數,縱向為相同控制點個數不同布設方案)
3 精度驗證及討論
Birute Ruzgiene[16]研究表明,不加控制點時成圖誤差極大,高程誤差可達米級,加控制點之后誤差迅速穩定在分米甚至厘米級。為評價各個等級控制點數量對精度產生的影像,本文選取17個均勻分布全圖的控制點進行精度驗證。
以ArcGIS為平臺,將17個點分別在生成的36幅正射影像圖刺出,提取橫縱坐標,然后在相應的數字地表模型(DSM)上提取高程,以實測值作為真值、提取的三維坐標作為測量值分別計算水平和豎直方向的誤差。對36個布點方案分別計算其x、y和z這3個方向的均方根誤差(RMSE),再計算9個控制點數量等級的x、y和z這3個方向的均方根誤差(RMSE),其計算公式為
(1)
(2)
(3)
式中,Xi、Yi和Zi分別表示正射影像圖中提取的測量值;X、Y和Z分別表示實測值;n表示參與運算的點數。
取每個控制點個數等級所有檢驗點總均方根誤差和4個布點方案中均方根誤差的最大值和最小值,如圖5所示。

圖5 均方根誤差分布
以股價圖的形式表示均方根誤差的大小,圖5中豎線上下兩端為同一控制點個數等級4個布點方案中均方根誤差的最大、最小值,中間黑色實心點表示該控制點等級數目所有檢查點誤差的均方根誤差。
從總體來看,3幅圖均可分為兩個階段:①誤差減小穩定性增加階段。水平方向x和y的誤差在控制點從3個增加到15個的過程中,中間黑色實心點逐漸降低,豎線逐漸縮短,這說明隨著控制點個數的增加,成果的精度在逐漸提高,并且由不同控制點布設方案而引起的誤差浮動也在縮小,即精度逐漸趨于穩定;豎直方向z的誤差在控制點從3個增加到11個的過程中也呈現以上規律。②誤差基本不變階段。水平方向x和y當控制點個數達到15個以后,誤差便不再減小而是在一定范圍內微弱的浮動,豎直方向z在11個控制點以上也呈現此規律。
具體來看,水平x和y兩個方向控制點個數在從3個到15個控制點增加的過程中,總的均方根誤差分別從7.31 cm和9.02 cm減小到3.57 cm和5.37 cm,控制點方案不同產生的最大均方根誤差分別從11.38 cm和11.36 cm減小到4.24 cm和5.61 cm。這說明在控制點不斷增加的過程中,成圖精度不斷升高,并且由控制點方案引起的成圖精度的差異不斷減小,即精度更加穩定;而當控制點個數達到19個時,x和y總的均方根誤差分別為3.60 cm和5.20 cm,最大均方根誤差分別為4.05 cm和5.66 cm,與15個控制點時的誤差幾乎沒有差異,即增長到達極限并趨于穩定。豎直方向上,控制點個數從3個增加到11個的過程中,總的均方根誤差和最大均方根誤差分別從59.51 cm和44.29 cm減小到11.89 cm和9.91 cm,與水平方向相比精度提升更為明顯,當控制點個數增加到19個時,這兩個誤差分別為9.01 cm和7.08 cm,精度有略微提升但并不明顯。與水平誤差相比,豎直方向的誤差除上述的兩個相同規律外,還呈現出穩定趨勢較早和穩定值較高的特點,豎直誤差在控制點達到11個時精度就開始趨于極限并穩定,水平方向則需達到15個,水平兩個方向的穩定值分別為4 cm和5 cm,而豎直方向的穩定值則為7 cm左右。
綜上所述,當控制點個數增加時成圖精度先逐漸增高,水平和豎直精度分別在15個和11個控制點時趨于穩定值。Birute Ruzgiene[16]在研究中總結稱航空攝影測量成果水平方向誤差最低可以達到1倍的地面分辨率,豎直方向最低可達到1.6倍的地面分辨率也進一步印證了這一結論。
4 結論與不足
無人機攝影測量用于數據采集的方法已經逐漸應用于各行各業。工業區等控制點布設不方便的特殊區域控制點個數對成圖精度的影響至今尚無具體定論,本文設計了9個不同等級的控制點個數方案,每個等級又設置了4種布點方案,最終得到結論如下:
(1) 隨著控制點個數增加,水平和豎直兩個方向的精度都在增加且成圖精度更加穩定。
(2) 當控制點增加到一定個數時,精度趨于穩定不再增加,成圖精度趨于最穩定狀態。
(3) 豎直方向相對于水平方向的誤差對控制點的反響更靈敏,精度更早趨于穩定,但穩定后誤差相對較大。
(4) 以本文100 m航高、4.7 cm分辨率為例,布設15個控制點即可得到最佳成果;如果著重豎直方面精度11個控制點即可得到最佳成果。
但本文也有一些不足之處: 廠區內地勢相對較為平緩,高差落差不大,是否會影響對豎直方向精度的分析結果存疑。
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21