利用數(shù)據(jù)融合改進(jìn)超短基線系統(tǒng)定位精度
2018-08-03 02:57:04嚴(yán)勝剛
測(cè)繪通報(bào) 2018年7期
關(guān)鍵詞:系統(tǒng)
黃 健,嚴(yán)勝剛
(西北工業(yè)大學(xué)航海學(xué)院,陜西 西安 710072)
超短基線(ultra-short baseline,USBL)定位系統(tǒng)是一種常用的水下聲學(xué)定位設(shè)備[1-4]。常規(guī)的USBL系統(tǒng)通過(guò)測(cè)量各通道間的相位差或時(shí)延差估算目標(biāo)方位,再利用應(yīng)答或同步方式測(cè)量目標(biāo)的斜距,進(jìn)而確定目標(biāo)的位置。
USBL系統(tǒng)的設(shè)計(jì)是水下聲學(xué)定位技術(shù)中的一項(xiàng)關(guān)鍵技術(shù),平面陣可以對(duì)整個(gè)空間或以陣列所在平面為界的半空間中的目標(biāo)進(jìn)行定位,在許多情況下都可以達(dá)到系統(tǒng)的設(shè)計(jì)要求。文獻(xiàn)[5—6]研究了平面陣的定位原理,并進(jìn)行了詳細(xì)的誤差分析。文獻(xiàn)[7—10]提出了平面八元陣定位原理,通過(guò)增加陣元個(gè)數(shù)有效地解決了USBL系統(tǒng)中存在的相位差模糊問(wèn)題。文獻(xiàn)[11—12]介紹了一種三維立體USBL系統(tǒng)接收陣列的設(shè)計(jì)。文獻(xiàn)[13]在六元對(duì)稱陣的基礎(chǔ)上,給出了若干種USBL系統(tǒng)定位算法。由于基陣孔徑小,且復(fù)雜的水下環(huán)境容易導(dǎo)致信號(hào)的相位產(chǎn)生起伏,常規(guī)USBL系統(tǒng)定位精度不高。為了滿足遠(yuǎn)距離定位要求,必須對(duì)常規(guī)USBL系統(tǒng)進(jìn)行改進(jìn)。
本文在常用的平面陣定位原理及定位方程的基礎(chǔ)上提出一種提高USBL系統(tǒng)定位精度的方法。以平面五元十字陣為例,系統(tǒng)僅需要測(cè)量一次時(shí)延差值,即可通過(guò)基本的平面陣獨(dú)立地對(duì)目標(biāo)進(jìn)行定位,隨后將這些獨(dú)立的定位結(jié)果進(jìn)行有效的數(shù)據(jù)融合,進(jìn)而得到最終的定位結(jié)果。仿真試驗(yàn)表明,該方法可以有效地提高低信噪比情況下USBL系統(tǒng)的定位精度和可靠性。
1 USBL系統(tǒng)的基本原理
平面五元十字陣的定位原理如圖1所示。在圖1 中,平面五元十字陣由兩條正交的線陣S1-S0-S3和S2-S0-S4構(gòu)成。陣元間距為D,以基陣中心S0為坐標(biāo)原點(diǎn)O建立直角坐標(biāo)系,5個(gè)陣元的坐標(biāo)分別為S0(0,0,0)、S1(D,0,0)、S2(0,D,0)、S3(-D,0,0)、S4(0,-D,0)。假設(shè)目標(biāo)位于T處,T′為T(mén)在xoy平面上的投影。T的直角坐標(biāo)為(x,y,z),球坐標(biāo)為(R,φ,θ),R、φ、θ分別為目標(biāo)到基陣中心的斜距、方位角和俯仰角。其中,斜距R=Δt·c,Δt為信號(hào)從目標(biāo)到陣元S0的傳播時(shí)間,c為聲速。
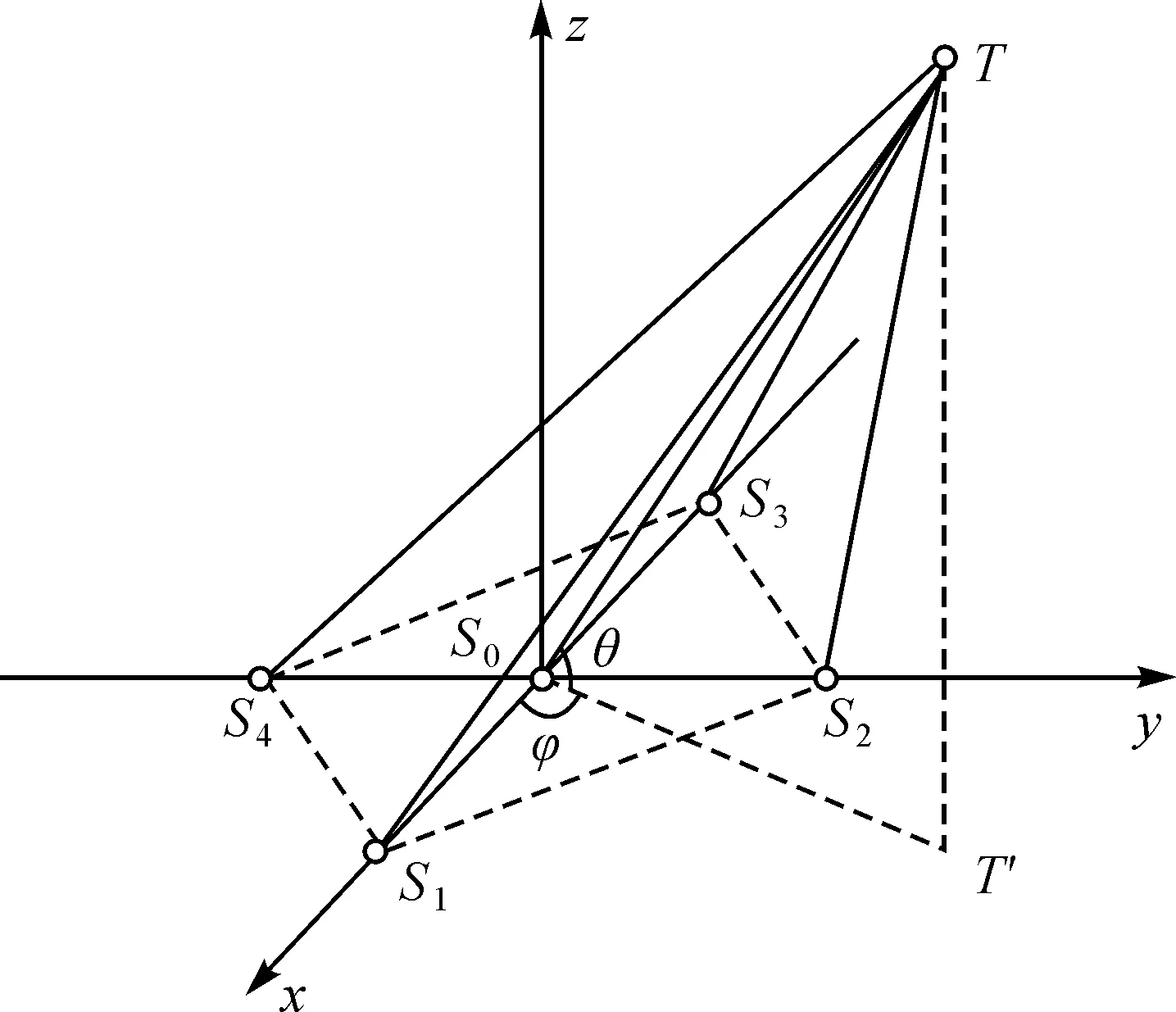
圖1 平面五元十字陣定位原理
為了確定目標(biāo)方位,USBL系統(tǒng)至少需要由3個(gè)基元構(gòu)成[14],令聲信號(hào)由目標(biāo)傳播到陣元Si的時(shí)延為τi,且τij=τj-τi,則三元陣可以通過(guò)以下公式計(jì)算目標(biāo)的方位[15]
(1)
十字正交陣與三元陣定位原理相同。圖1所示的五元十字陣中包括8個(gè)正交的三元陣:USBL012、USBL023、USBL034、USBL041、USBL123、USBL234、USBL341、USBL412(下標(biāo)的數(shù)字為所包含陣元的標(biāo)識(shí)),以及1個(gè)十字正交陣USBL1234。
在圖1中,S1、S2、S3、S4這4個(gè)陣元構(gòu)成平面四元十字陣,本文中標(biāo)識(shí)為USBL4。平面四元十字陣的定位方程為[5]
(2)
平面五元十字陣(本文中標(biāo)識(shí)為USBL5)是在平面四元十字陣的基礎(chǔ)上在基陣中心增加了1個(gè)陣元S0,其定位方程為[6]
(3)
2 本文方法
在利用到達(dá)時(shí)延差(time difference of arrival,TDOA)測(cè)量值對(duì)目標(biāo)進(jìn)行定向的USBL系統(tǒng)中,系統(tǒng)定位精度與傳感器和目標(biāo)之間的相對(duì)幾何位置關(guān)系有關(guān)[16],不同的陣型對(duì)目標(biāo)進(jìn)行定位的精度也存在差別。為此,本文通過(guò)下面步驟來(lái)對(duì)各基本陣型的初始定位坐標(biāo)進(jìn)行數(shù)據(jù)融合,以達(dá)到提高USBL系統(tǒng)定位精度的目的。
(1) 計(jì)算每個(gè)定位坐標(biāo)到其余坐標(biāo)的歐氏距離之和為
(4)

(2) 選擇到其余點(diǎn)距離和最小的那個(gè)坐標(biāo)點(diǎn)作為初始定位點(diǎn)的中心
(5)

Lj>η·L
(6)
式中,η為經(jīng)驗(yàn)參數(shù)。其值的大小決定著參與數(shù)據(jù)融合的有效點(diǎn)的個(gè)數(shù)。
(4) 對(duì)有效點(diǎn)的坐標(biāo)運(yùn)用LS(Least Square)方法,得到最終的定位結(jié)果。
3 仿真試驗(yàn)

(7)
通過(guò)式(8)來(lái)計(jì)算定位距離誤差的平均值和標(biāo)準(zhǔn)差,并對(duì)比各系統(tǒng)的定位精度
(8)
式中,N=360,為測(cè)試的次數(shù)。
改變接收信號(hào)的信噪比,測(cè)試USBL系統(tǒng)在不同信噪比條件下的距離定位精度。接收信號(hào)信噪比范圍設(shè)置為[-10 dB,20 dB],目標(biāo)與USBL系統(tǒng)之間的俯仰角取為θ=40°。測(cè)試結(jié)果如圖2所示。
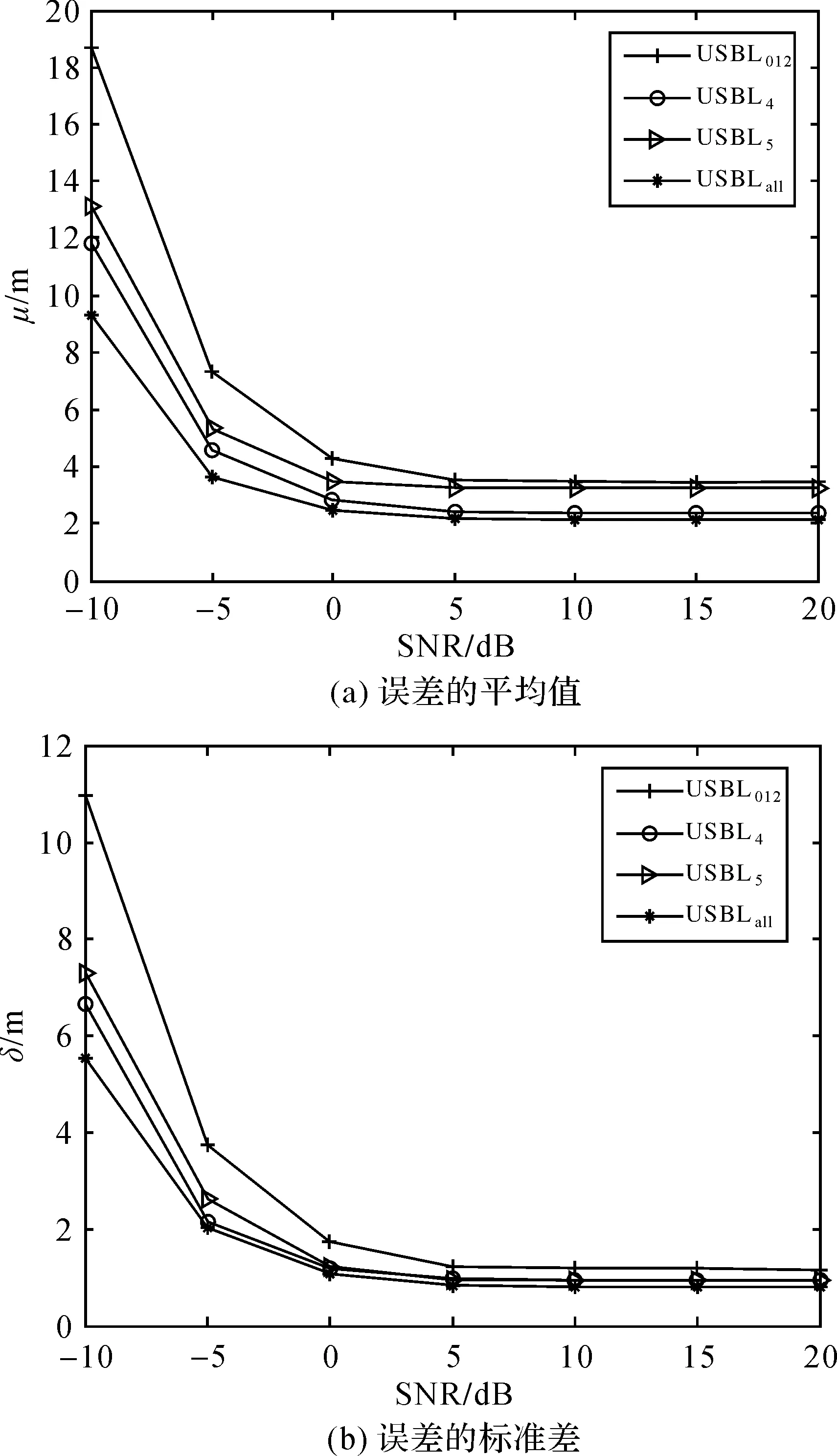
圖2 各陣型USBL系統(tǒng)定位精度與信噪比的關(guān)系
從圖2可以看出,在信噪比較高的情況下,各種基本陣型都具備較好的定位性能,但是在信噪比較低的情況下,各種基本陣型均容易出現(xiàn)較大的定位誤差。本文方法綜合了各基本陣型的定位結(jié)果,選擇了其中較可靠的定位結(jié)果進(jìn)行融合,使得系統(tǒng)總體的定位性能隨著信噪比的降低而下降得更為緩慢。試驗(yàn)結(jié)果說(shuō)明,本文方法可以有效地提高低信噪比情況下USBL系統(tǒng)定位的精度和可靠性。
通過(guò)測(cè)量USBL系統(tǒng)在給定俯仰角情況下的定位精度來(lái)測(cè)試各陣型定位方法與俯仰角之間的關(guān)系,信噪比固定為-5 dB。試驗(yàn)結(jié)果如圖3所示。
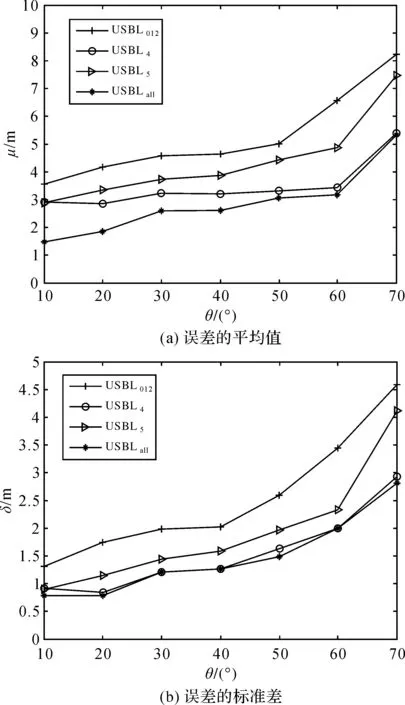
圖3 各陣型USBL系統(tǒng)定位精度與俯仰角的關(guān)系
由圖3可以看出,與另外3個(gè)陣型的USBL系統(tǒng)相比,USBLall系統(tǒng)在目標(biāo)位于不同俯仰角的情況中,距離定位誤差的平均值和標(biāo)準(zhǔn)差都相對(duì)較低,說(shuō)明本文方法可以提高目標(biāo)位于不同俯仰角情況下USBL系統(tǒng)的可靠性和精度。
使用本文方法對(duì)目標(biāo)進(jìn)行定位,通過(guò)改變經(jīng)驗(yàn)參數(shù)η的取值來(lái)測(cè)試其對(duì)USBL系統(tǒng)定位精度的影響。試驗(yàn)中信噪比固定為-5 dB,目標(biāo)與USBL系統(tǒng)之間的俯仰角θ=40°。通過(guò)以1°為步長(zhǎng)改變目標(biāo)方位角來(lái)改變目標(biāo)的真實(shí)坐標(biāo),令第i次定位過(guò)程中有εi個(gè)初始定位點(diǎn)被判斷為異常點(diǎn)。通過(guò)式(9)計(jì)算異常點(diǎn)的平均數(shù)
(9)
式中,N=360為測(cè)試的次數(shù)。同時(shí),試驗(yàn)還通過(guò)式(7)和式(8)計(jì)算了不同經(jīng)驗(yàn)參數(shù)情況下定位距離誤差的平均值和標(biāo)準(zhǔn)差。試驗(yàn)結(jié)果如圖4所示。
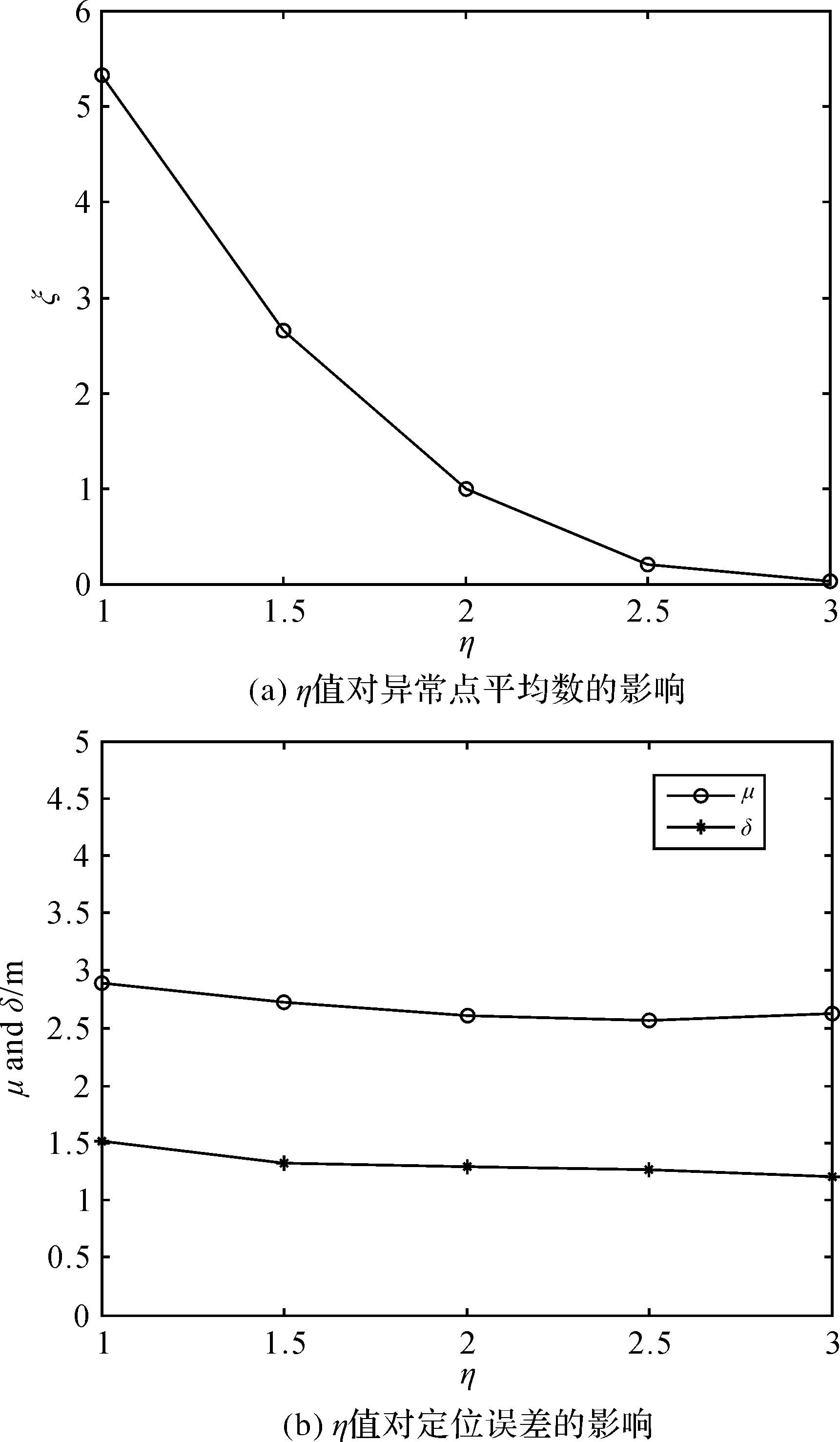
圖4 η值對(duì)距離定位誤差的影響
由圖4可以看出,η的不同取值對(duì)基本陣型定位結(jié)果中被視為異常點(diǎn)的個(gè)數(shù)有較大影響,但是其對(duì)最終數(shù)據(jù)融合后的USBL系統(tǒng)定位結(jié)果影響不大。不同的η值所得到的距離定位誤差,其平均值和標(biāo)準(zhǔn)差都保持相對(duì)穩(wěn)定。
4 結(jié) 語(yǔ)
本文提出了一種利用數(shù)據(jù)融合改進(jìn)USBL系統(tǒng)定位精度的方法。系統(tǒng)僅需要測(cè)量一次信號(hào)到達(dá)各陣元的時(shí)延,通過(guò)綜合各種陣型定位結(jié)果,即可達(dá)到提高USBL系統(tǒng)可靠性和定位精度的目的。通過(guò)仿真試驗(yàn)證明了本文提出的方法在不同信噪比和目標(biāo)處于不同俯仰角的情況下均能提高USBL系統(tǒng)的定位精度。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(xiāo)(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
- 測(cè)繪通報(bào)的其它文章
- 天狼星免像控航攝系統(tǒng)與Inpho系統(tǒng)在無(wú)人機(jī)遙感數(shù)據(jù)后處理中的對(duì)比
- 適應(yīng)新時(shí)代地理信息發(fā)展的職業(yè)能力建設(shè)研究
- “雙一流”建設(shè)背景下測(cè)繪類教師專業(yè)發(fā)展績(jī)效評(píng)價(jià)體系與模型構(gòu)建
- 利用高分辨率TSX/TDX交軌干涉測(cè)量技術(shù)探測(cè)渤海浮冰信息
- 提高非量測(cè)相機(jī)高程精度關(guān)鍵技術(shù)分析
- 結(jié)合SURF算法和單應(yīng)性矩陣的無(wú)人機(jī)影像匹配