運營高速鐵路路基變形段軌道幾何狀態自動監測技術
2018-08-01 06:42:56高至飛
鐵道建筑 2018年7期
高至飛
(廣州鐵路科技開發有限公司,廣東 廣州 510100)
路基病害、涉及鐵路的工程施工等引起運營高速鐵路路基變形,造成軌道幾何狀態變化時,需對線路幾何狀態進行測量。這類問題的明顯特征是受影響區域相對集中,軌道幾何狀態變化量較大。目前,對既有鐵路軌道幾何狀態監測主要采用人工測量的方法[1]。由于高速鐵路行車速度快、行車密度大、線路全封閉,人工測量的方法只能在晚上天窗點進行,無法實時監測線路的運營狀況。
本文探討如何在高速鐵路路基變形段對軌道幾何狀態變化進行實時自動監測。基本思路是在軌道(軌腰)上安裝專用棱鏡,組建基于自動全站儀的軌道幾何狀態實時自動監測系統,連續監測高程、平面位置、軌距、水平、高低、軌向等軌道幾何參數變化情況[2],實現數據自動采集、計算、傳輸和報警,以保證高速鐵路運營安全。
1 軌道幾何狀態自動監測技術
1.1 軌道幾何狀態自動監測原理
本文采用相對變化量的方法計算軌道幾何狀態參數[3-4]。軌道幾何狀態變化量,采用帶自動監測系統的極坐標法進行測量。首先在監測范圍的軌腰上安裝專用棱鏡,人工利用安博格小車測出監測范圍內軌道幾何狀態參數作為初始值,然后通過自動全站儀測量出軌道上各測點的坐標,用每次測量值與前次測量值相減即得到本次變化量。用每次測值與初始測量值相減即得到累計變化量,經幾何關系換算得到高程、平面位置以及軌距、水平、高低、軌向、扭曲及軌距變化率的本次及累計變化量。累計變化量與人工測得的初始值相加即為當前的軌道幾何狀態。
假設某段軌道上有A(xA,yA,hA),B(xB,yB,hB),C(xC,yC,hC)及相對應另一條軌道上的A′(xA′,yA′,hA′),B′(xB′,yB′,hB′),C′(xC′,yC′,hC′)6個點,式中(x,y,h)指測點的空間坐標。由安博格小車測出的幾個測點(斷面)的軌道幾何狀態初始值分別為高程H0,平面位置S0,水平P0,軌距G0,根據上述計算原理和軌道幾何狀態參數的基本定義來計算各個參數。

則A點時刻t的軌面高程HAt
HAt=HA0+(hAt-hA)
(1)
式中:HA0為A點的初始高程;hAt為A點時刻t的豎向坐標。
以A,B為基點,計算軌道點C到AB直線的距離。C點到AB直線的距離初始值LC0為
(2)

C點t時刻的平面位置SCt為
SCt=SC0+(LCt-LC0)
(3)
式中:SC0為C點初始平面位置;LCt為t時刻C點到AB直線的距離。
A和A′兩點初始距離LAA′為
(4)
AA′斷面t時刻的軌距GAtA′t為
(5)


(6)

得到外部軌道幾何狀態4個參數后,根據內部軌道幾何狀態參數定義可以分別求得內部軌道幾何狀態參數,故本文中只討論上述4個參數。
1.2 誤差分析
(7)
式中,mh為h坐標的中誤差。
平面位置中誤差m平面位置為
(8)
式中:mx為x坐標的中誤差,my為y坐標的中誤差。
水平中誤差m水平為
m水平=2m平面位置
(9)
軌距中誤差m軌距為
(10)
以2測回的測量條件下對上述軌道幾何狀態參數進行誤差分析,確定是否滿足使用要求。
監測儀器采用徠卡-TS30型全站儀,該儀器測角精度為0.5″,測距精度為0.6 mm+每1 km增加1 mm,現場測量最大斜距D=100 m,最大豎直角θ=-10°,則最大天頂距Z=100°,考慮水平角β=0.01°,β=89.99°,β=45°,測站和監測點均強制對中,不考慮對中誤差。
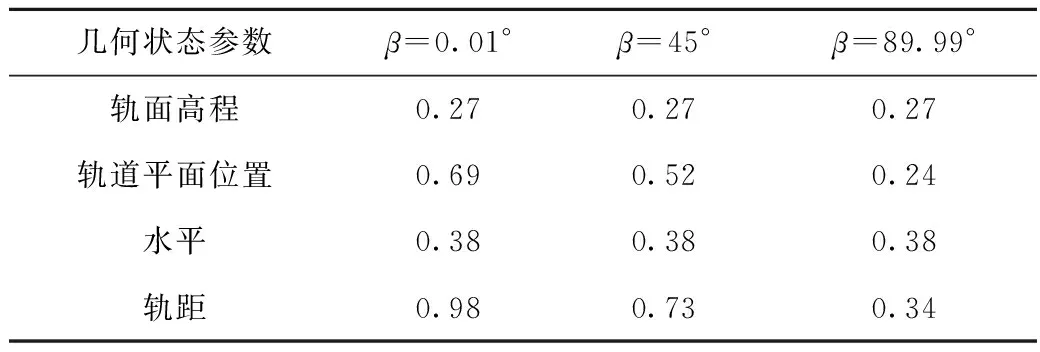
表1 t時刻軌道幾何狀態各參數的中誤差 mm
由表1可知:在2測回的測量條件下t時刻軌道幾何狀態參數軌面高程、軌道平面位置、水平、軌距中誤差皆在1 mm以內,可以滿足對軌道幾何狀態參數的測量要求。
相信大多數朋友已經對全畫幅數碼相機的技術特點與發展歷程比較熟悉了,今天我們就從一些重要節點入手,來看看全畫幅機型是如何一路走來發展至巔峰的。
2 高速鐵路軌道幾何狀態自動監測技術可靠性對比分析
對比機器人和安博格小車的實測數據,分析兩者所測得區段軌道幾何狀態參數的相關性和二者差值分布情況,試驗選取2016年8月5日的數據進行對比分析。
對機器人與安博格小車所測軌道幾何狀態數據作相關性及顯著性分析,采用SPSS軟件計算結果見表2。可知:在相同的試驗日期,機器人與安博格小車所測軌道高程、平面位置、水平和軌距在試驗段的分布曲線形態基本一致,高度相關。
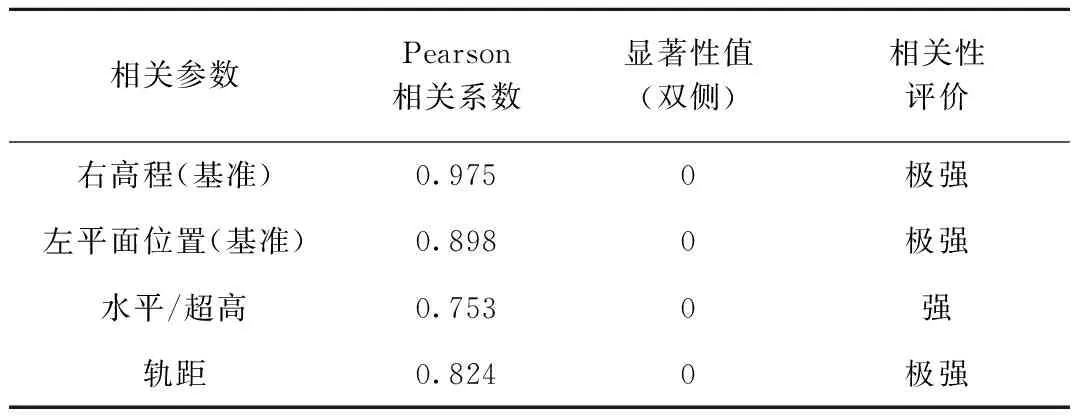
表2 2種方法測值的Pearson相關系數和顯著性值
在相同的試驗日期,機器人和安博格小車對軌道高程、平面位置、水平、軌距的測量差值按正態分布規律來統計(見表3),越靠近差值樣本均值,分布頻數越高,越遠離均值,分布頻數越低。從表3可知:機器人和安博格小車所測軌道高程、平面位置、水平、軌距差值均值分別為-0.9,0.5,0.5,-0.1 mm,均小于1 mm;在(μ-2σ)~(μ+2σ)分布數量分別達到了28,29,28,30,分別占總樣本數31的90%,94%,90%,97%。可見,機器人和安博格小車對軌道高程、平面位置、水平、軌距的測量差值不大且較為集中。
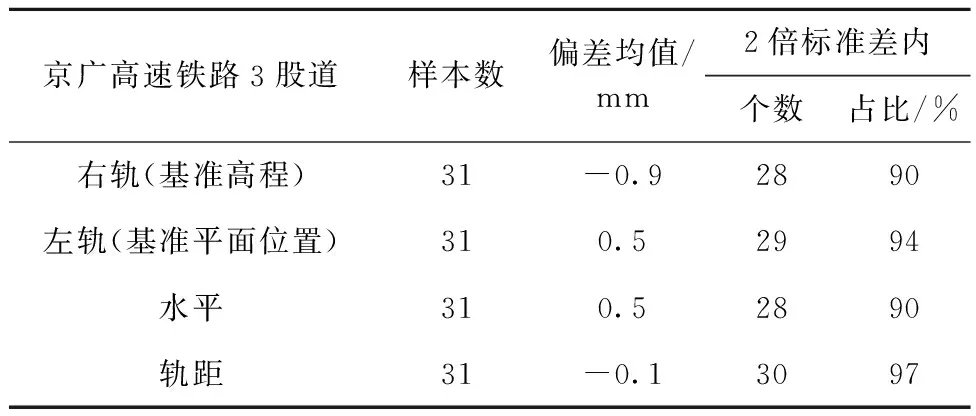
表3 2種方法所測軌道幾何參數差值正態分布統計
綜上所述,機器人與安博格小車測得的軌道幾何狀態相關性高,差值不大且離散性小。由此可見機器人測得的軌道幾何狀態是可靠的,用機器人代替安博格小車在固定區段進行軌道幾何狀態的自動監測是可行的。
3 高速鐵路軌道幾何狀態自動監測技術在工程中的應用
3.1 工程概況
廣州市軌道交通9號線工程廣州北—花城路區間隧道在出廣州北站后下穿京廣高速鐵路4條股道及兩側站臺(穿越里程為K2247+510—K2247+550),下穿鐵路站臺及股道寬度共約60 m[6-7]。此項目為國內首例地鐵在灰巖、砂層地區以淺埋隧道方式下穿高速鐵路路基施工,工程風險極大,為了確保施工中京廣高速鐵路安全運營,需要連續監測加固及隧道穿越施工時引起的軌道幾何狀態變化情況。
3.2 監測方案
對京廣高速鐵路3股道及4股道進行監測,監測頻率為3次/d。軌道幾何狀態自動監測系統硬件主要為測量機器人和特制棱鏡。軌道幾何狀態監測點以專用棱鏡作為觀測標志,棱鏡具體尺寸為2 cm×2 cm×1 cm,外殼材料為工程塑料,棱鏡用環氧樹脂系膠結劑粘結在軌道(軌腰)上,間隔1 m布置,并面向觀測基站。
3.3 施工過程中監測試驗及數據分析
軌道幾何參數的符號取值與安博格小車一致,因下一段曲線為右轉曲線故軌面高程右軌為基準軌,軌道平面位置以高速鐵路3股道左軌為基準軌。軌道平面實際位置位于設計位置左側時,偏差為負;平面實際位置位于設計位置右側時,偏差為正。軌面實際高程高于設計高程時,偏差為正;低于設計高程時,偏差為負。左軌高于右軌,則超高為正值;左軌低于右軌,則超高為負值。實際軌距大于標準軌距時軌距偏差為正,反之為負[8]。
由于K2247+526里程位置處于豎向沉降較大區域,故選取其作代表性的斷面進行分析。
3.3.1 高程
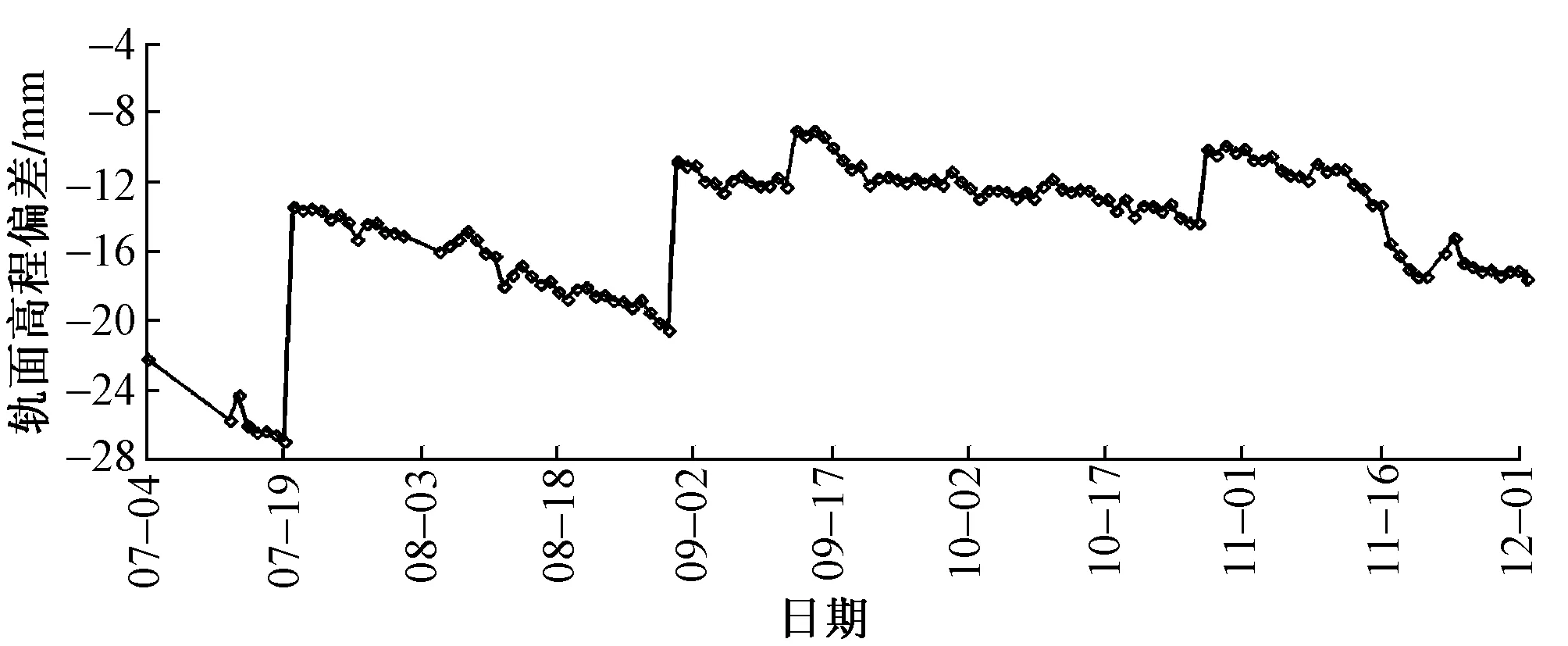
圖1 K2247+526斷面軌面高程偏差隨時間變化曲線(2016年)
2016年K2247+526斷面軌面高程偏差隨時間變化見曲線圖1。可知:7月4—19日軌面高程偏差由-22.1 mm 逐漸變化為-26.9 mm,7月2—30日偏差由-13.3 mm逐漸變化為-20.5 mm,8月31日—10月27日偏差由-10.7 mm逐漸變化為-14.2 mm,10月28日—12月2日偏差由-10 mm逐漸變化為-17.5 mm,說明施工期間軌面處于持續下沉狀態;另外,分別經7月19日、8月30日、10月27日3次精調后,軌面高程變化明顯,分別由-26.9 mm直接抬升為-13.3 mm,由-20.5 mm直接抬升為-10.7 mm,由-14.2 mm 直接抬升為-10 mm,說明精調對軌面高程影響顯著。另外,9月12—13日出現了軌面高程突然抬升的情況,原因為施工單位在施作水平旋噴樁時,注漿壓力未控制得當,引起軌道板結構被注漿壓力頂起的情況,從而引起軌面高程變化。
2016年各斷面軌面高程偏差隨時間變化曲線見圖2。可知,軌面高程偏差均為負值,說明各斷面軌面高程均低于設計高程;里程K2247+524—K2247+528處于沉降漏斗的中心區域,7月4—19日各斷面軌面高程處于持續下沉狀態,越靠近漏斗中心,下沉量越大,7月19日軌面高程偏差最大點K2247+526為-26.9 mm,最小點K2247+546為-10.8 mm,相差16.1 mm;經7月19日精調后,7月20日各斷面軌面高程最大偏差-13.3 mm,最小偏差-7.2 mm,相差6.1 mm;通過精調,不僅使各斷面軌面高程偏差變小,同樣也使得軌面高程曲線變得平緩。再對比8月3日,8月31日及10月27日,10月28日軌面高程曲線,精調同樣也達到了相應的效果。

圖2 各斷面軌面高程偏差隨時間變化曲線(2016年)
3.3.2 軌道平面位置
2016年K2247+526斷面軌道平面位置偏差隨時間變化曲線見圖3。可知:7月4日—10月27日中間雖然經歷7月19日,8月30日2次精調,軌道平面位置偏差變化基本不大,介于-4~-7 mm,曲線平緩且較穩定,說明這2次精調未對軌道平面位置進行調整。10月27日對軌道平面位置進行了精調,使得軌道平面位置偏差從10月27日的-5.7 mm 調整到10月28日的-1.5 mm,說明精調效果顯著。
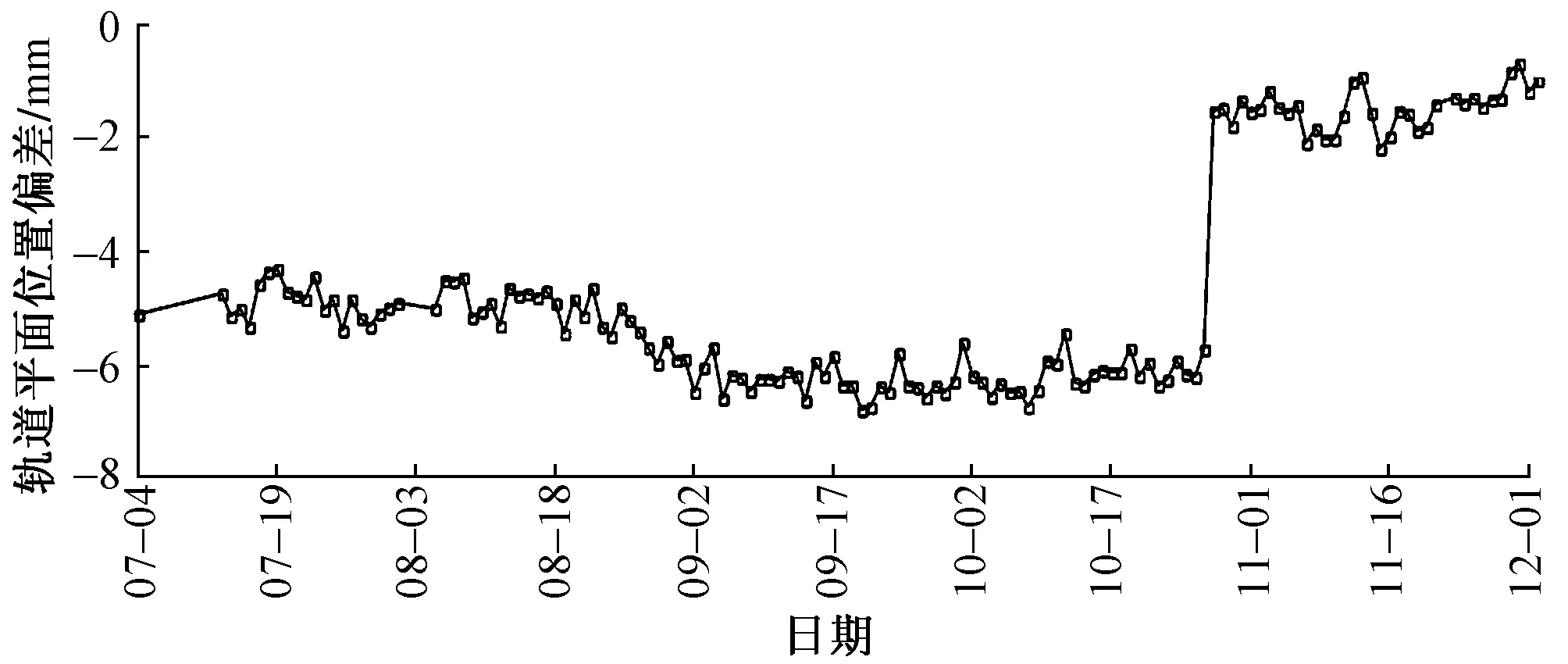
圖3 K2247+526斷面軌道平面位置偏差隨時間變化曲線(2016年)
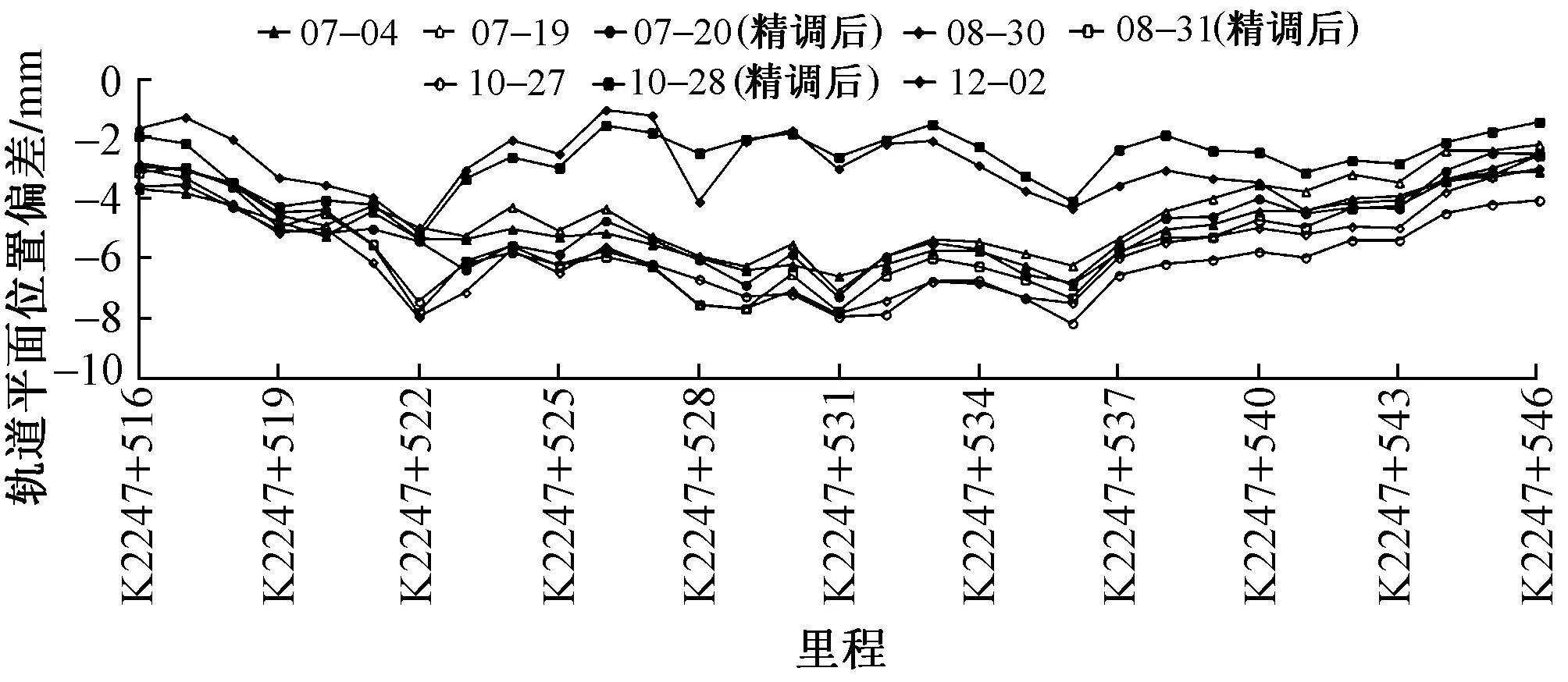
圖4 各斷面軌道平面位置偏差隨時間變化曲線(2016年)
2016年各斷面軌道平面位置偏差隨時間變化曲線見圖4。可知:軌道平面位置偏差均為負值,說明各斷面軌道平面位置均位于設計位置左側;7月4日—10月27日各斷面軌道平面位置曲線基本處于重疊狀態,說明這段時期軌道平面位置變化不大,同樣也說明7月19日,8月30日2次精調未調整軌道平面位置;10月28日曲線明顯與7月4日—10月27日之間的曲線分離,向0靠近,說明10月27日對軌道平面位置進行了精調,精調后軌道平面位置偏差明顯減小,精調效果顯著。
3.3.3 水平(超高)
2016年K2247+526斷面水平偏差隨時間變化曲線見圖5。可知:K2247+526斷面水平偏差基本上為負值,說明其斷面基本處于左軌低于右軌狀態;K2247+526斷面水平偏差均在允許偏差范圍內。7月4日—10月27日中間雖然經歷7月19日,8月30日2次精調,水平偏差變化基本不大,介于-1~-4 mm,曲線平緩且較穩定,說明這2次精調未對軌道水平參數進行調整。10月27日對軌道水平參數進行了精調,使得軌道水平偏差從10月26日的-2.9 mm調整到10月29日的-0.4 mm,說明精調效果顯著。
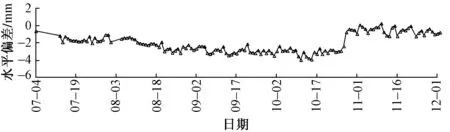
圖5 K2247+526斷面水平偏差隨時間變化曲線(2016年)
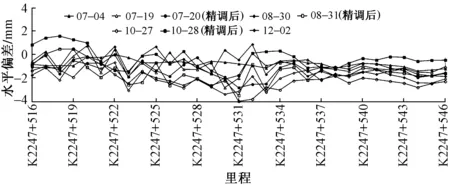
圖6 各斷面水平偏差隨時間變化曲線(2016年)
2016年各斷面水平偏差隨時間變化曲線見圖6。可知:大多時間各斷面水平偏差為負,隨著時間推移部分斷面水平偏差存在由負變正的情況,說明大部分時間左軌低于右軌,左右軌存在不均勻沉降的問題并且隨著軌道板的沉降量增大在緩慢變大。7月4日—10月27日各斷面水平偏差曲線基本處于重疊狀態,說明這段時期軌道水平變化不大,各斷面水平偏差均在允許偏差范圍內。10月28日水平偏差曲線明顯與10月27日曲線分離,向0靠近,說明精調后軌道水平偏差明顯減小,精調效果顯著。
3.3.4 軌距
2016年K2247+526斷面軌距偏差隨時間變化曲線見圖7。可知:K2247+526斷面軌距偏差大多不在允許偏差范圍內,超過了預警值。7月4日—10月27日中間雖然經歷7月19日,8月30日2次抬道,軌距變化基本不大,處于-2 mm上下,曲線平緩且較穩定,說明這2次精調未對軌距進行調整。10月27日對軌距進行了精調,使得軌距偏差從10月26日的-2.0 mm 調整到10月29日的-3.3 mm,說明精調后軌距進一步收窄。
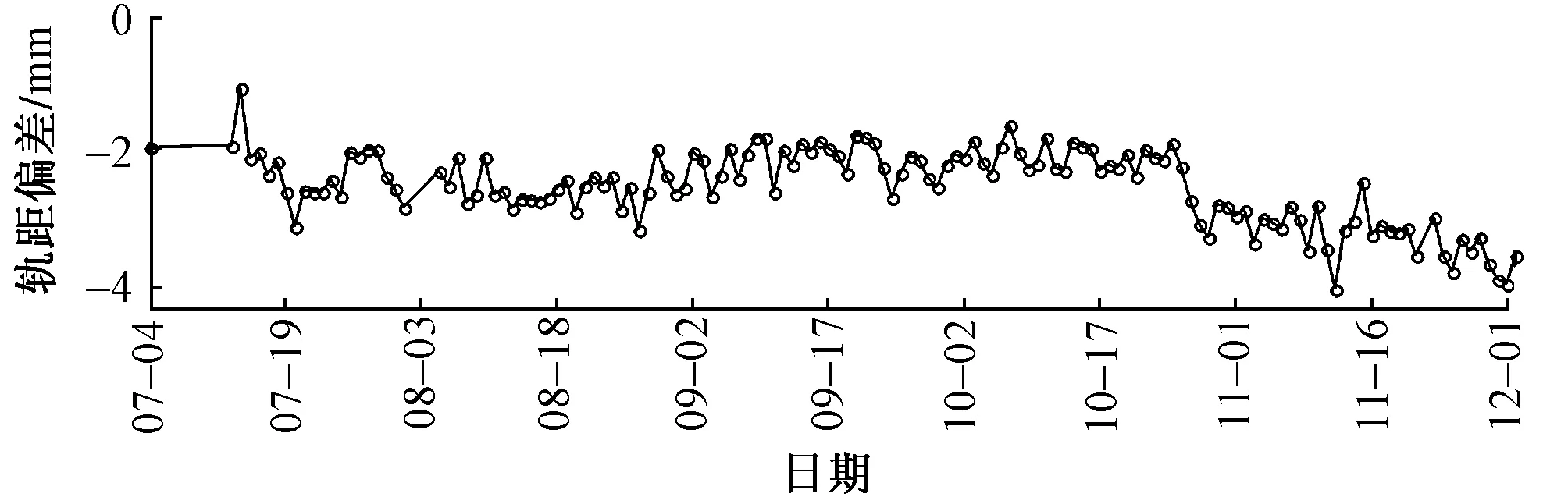
圖7 K2247+526斷面軌距偏差隨時間變化曲線(2016年)
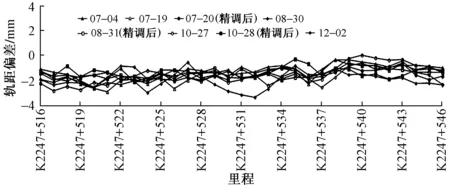
圖8 各斷面軌距偏差隨時間變化曲線(2016年)
2016年各斷面軌距偏差隨時間變化曲線見圖8。可知:各斷面軌距偏差均為負值,說明各斷面軌距均小于標準軌距;部分斷面軌距偏差在某一時間段內超出了允許偏差范圍。7月4日—12月2日各斷面軌距偏差曲線基本在-2 mm上下波動,但波動幅度不大,說明軌距偏差一直較為穩定。
在監測過程中發現無砟軌道部分幾何狀態參數已經達到二級超限的標準,廣州南高速鐵路工務段分別于2016年7月19日,8月30日,10月27日對施工路段的無砟軌道結構進行了精調。通過運用軌道幾何狀態自動監測系統對施工區域不間斷地監測,保證了京廣高速鐵路的安全運營和施工安全,下穿盾構隧道已于2016年12月17日成功穿越京廣高速鐵路。
4 結論
1)在一定的技術條件下,機器人測得的軌道幾何狀態參數軌面高程、軌道平面位置、水平、軌距中誤差皆在1 mm以內,理論上可以滿足軌道幾何狀態參數的測量精度要求。
2)實測數據表明機器人與安博格小車測得的軌道幾何狀態參數相關性高,差值離散性很小,機器人測得的軌道幾何狀態參數是可靠的,用機器人代替安博格小車在固定區段進行軌道幾何狀態的自動監測是可行的。
3)現場的實際應用中能準確地在線實時監測施工區段軌道幾何狀態的變化情況,保證高速鐵路的運營安全,值得在實踐中推廣。
軌道幾何狀態監測系統天窗時間內測量值較為可靠穩定,但在運營時段如何排除列車對測量造成的影響是后續的研究方向。
