熱傳導PDE和Richardson-Lucy相結合的圖像恢復方法
2017-12-12 01:33:34賴承棟譚彩娟
湖南城市學院學報(自然科學版) 2017年4期
苗 晴,賴承棟,譚彩娟
?
熱傳導PDE和Richardson-Lucy相結合的圖像恢復方法
苗 晴,賴承棟,譚彩娟
(佛山科學技術學院數學與大數據學院,廣東 佛山 528000)
針對模糊含噪圖像的恢復問題,提出了一種新的圖像恢復方法﹒該方法通過將熱傳導型偏微分方程(PDE)和Richardson-Lucy(R-L)算法相結合,先對模糊含噪的降質圖像用熱傳導PDE的方法進行去噪,用來提高圖像的信噪比;然后在噪聲減弱的情況下用R-L迭代算法恢復圖像﹒實驗結果表明,與傳統的R-L算法和均值濾波后R-L方法相比,本文方法能抑制振鈴效應的傳播及圖像噪聲的進一步放大,且在峰值信噪比(PSNR)數值上改進1~2 dB﹒
圖像恢復;偏微分方程;Richardson-Lucy算法;振鈴效應
圖像恢復也稱圖像復原,是數字圖像處理領域的主要分支之一﹒圖像在成像過程中,會因光學系統的散焦、運動等因素的影響而導致圖像模糊,又加上傳感器等噪聲的干擾從而造成圖像的退化﹒圖像的退化過程可以表示為原始圖像和點擴散函數(PSF)的卷積模糊并加上噪聲,圖像恢復是通過對初始圖像退化過程的分析,對模糊噪聲圖像進行建模,最后采取相反的過程以恢復出原始清晰圖像[1-2]﹒
圖像恢復的經典方法有維納濾波、約束最小二乘正則化等線性復原方法﹒由于非線性迭代技術作為復原的工具,常常會獲得比線性方法更好的結果,其中Richardson-Lucy(R-L)方法[3-6]是目前應用較廣泛的非線性圖像恢復方法之一﹒
R-L算法采用非線性迭代濾波方式,具有收斂性,能自動地滿足圖像的非負性約束和能量保持性質,是經典的圖像恢復方法之一﹒但是R-L算法也存在兩個重要缺陷:一是振鈴效應,二是噪聲放大問題[4],當模糊圖像中存在噪聲時,隨著迭代次數的增加,在恢復更多圖像細節的同時,平滑區域的振鈴也會增多,同時噪聲在每次的迭代中會被放大,這會嚴重影響圖像復原的效果﹒在實際應用中,為了更好地獲得圖像恢復質量,一般在使用R-L算法前須解決噪聲放大的問題﹒
圖像去噪是圖像恢復過程中的重要部分,偏微分方程(PDE)圖像去噪模型[7-12]因其以強大的數學理論為基礎,近些年來在圖像處理領域受到了廣泛的關注,并已取得了顯著的成果﹒它從分析圖像去噪的機理入手,結合變分法、泛函分析、形態學等數學工具,建立了圖像去噪和PDE相關的公理體系﹒PDE去噪的基本思想是在圖像同質特征區域內擴散以減弱噪聲,并在區域邊界等位置不擴散以保持邊緣特征﹒
本文根據圖像的退化模型,提出了一種熱傳導PDE去噪與R-L迭代算法相結合的圖像恢復方法﹒即基于熱傳導PDE方程的去噪模型,選取特定的二維差分形式用于數值計算并保持穩定性,對圖像作鏡面反射來處理圖像的邊界,在噪聲減弱的情況下用R-L算法恢復圖像,重現原始圖像的重要信息﹒
1 圖像的退化模型

2 圖像恢復方法的設計
2.1 熱傳導PDE方法圖像去噪
PDE是從運動的觀點來處理圖像的﹒在圖像處理中,PDE形式有熱傳導方程、波動方程、Laplace方程及Poisson方程等[8-10],其中熱傳導方程的去噪是源于以下的數學理論[8]﹒


本文差分運算選擇以下格式:






2.2 Richardson-Lucy算法




2.3 熱傳導PDE方法與R-L算法結合
3 實驗結果及分析
實驗所處理的是256×256的lena圖像和cameraman圖像﹒為驗證本文方法的有效性,實驗中也對比了另外2種方法,一種是直接用傳統的R-L方法恢復圖像;另一種是先經過均值濾波去噪處理,然后用R-L方法復原﹒算法的復原性能用峰值信噪比(PSNR)/dB來衡量,PSNR定義為



圖1 不同方法恢復lena圖像的對比效果


圖2 不同方法恢復cameraman圖像的對比效果
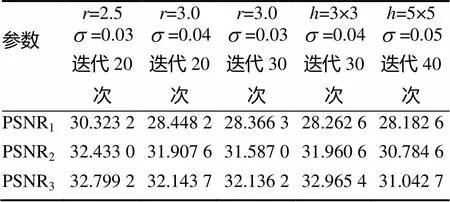
表1 lena圖像用不同方法恢復的PSNR數值 dB

表2 cameraman圖像用不同方法恢復的PSNR數值 dB
4 結論
本文針對傳統的R-L方法復原圖像出現振鈴及噪聲放大等問題,提出了一種結合熱傳導PDE去噪與R-L算法對圖像進行恢復處理的方法﹒首先運用熱傳導PDE去噪模型,選取特定二維差分形式用于數值計算并保持穩定性,對圖像作鏡面反射來處理圖像邊界,然后在噪聲減弱的情況下用R-L算法恢復圖像﹒結果表明,本文方法比傳統的R-L算法在噪聲處理上有較大改進,同時也減弱了復原圖像的振鈴效應,整體視覺效果有了明顯改善,表明了本文方法的有效性及實用性﹒
[1]沈峘, 李舜酩, 毛建國, 等. 數字圖像復原技術綜述[J]. 中國圖象圖形學報, 2009, 14(9): 1764-1775.
[2]樊啟斌, 焦雨領. 變分正則化圖像復原模型與算法綜述[J]. 數學進展, 2012, 41(5): 531-546.
[3]李勇, 范承玉, 時東鋒, 等. 基于加速阻尼Richardson-Lucy算法的湍流退化圖像盲復原方法[J]. 激光與光電子學進展, 2011, 48(8): 104-111.
[4]趙博, 張文生, 丁歡. 基于Richardson-Lucy的圖像去模糊新算法[J]. 計算機工程與應用, 2011, 47(34): 1-4.
[5]姜超, 耿則勛, 魏小峰, 等. 一種結合射影運動模糊模型的Richardson-Lucy算法[J]. 測繪科學技術學報, 2013, 30(3): 288-292.
[6]王巧, 喬雙. Richardson-Lucy與調制核相結合的圖像復原方法[J]. 東北師大學報: 自然科學版, 2014, 46(1): 66-70.
[7]YOU Y L, KAVEH M. Fourth-order partial differential equations for noise removal[J]. IEEE Transactions on Image Processing, 2000, 9(10): 1723-1730.
[8]張亶, 陳剛. 基于偏微分方程的圖像處理[M]. 北京: 高等教育出版杜, 2004.
[9]鄭鈺輝, 張建偉, 陳允杰, 等. 加權型曲率保持PDE圖像濾波方法[J]. 自動化學報, 2011, 37(10): 1175-1182.
[10]阮秋齊, 仵冀穎. 數字圖像處理中的偏微分方程方法[J]. 信號處理, 2012, 28(3): 301-314.
[11]黃果, 許黎, 陳慶利, 等. 基于時間-空間分數階偏微分方程的圖像去噪模型[J]. 系統工程與電子技術, 2012, 34(8): 1741- 1752.
[12]ZHANG C J, CHEN Y, DUANMU C J, et al. Image denoising by using PDE and GCV in tetrolet transform domain[J], Engineering Applications of Artificial Intelligence, 2016, 48(10): 204-229.
(責任編校:龔倫峰)
Image Restoration Based on Partial Differential Equation and Richardson-Lucy Algorithm
MIAO Qing, LAI Chengdong, TAN Caijuan
(School of Mathematics and Big Data, Foshan University, Foshan, Guangdong 528000, China)
A new image restoration method for the blurred noisy image is proposed. It combined heat conduction partial differential equation(PDE) method with Richardson-Lucy(R-L) algorithm. At first the heat conduction PDE method is used to remove the blurred image’s noise to improve the signal-to-noise ratio of the image, and then the R-L method is adopted when the noise is weakened. Compared with the original R-L algorithm and the combined method based on average filter and R-L algorithm, experiments showed that the proposed method could prevent propagation of ringing artifacts and further amplification of image noise, and the peak signal to noise ratio(PSNR) value of the restored image is improved 1~2 dB.
image restoration; partial differential equation; Richardson-Lucy algorithm; ringing artifacts
TP391.4
A
10.3969/j.issn.1672-7304.2017.04.0012
1672–7304(2017)04–0056–04
2017-03-16
廣東省高等教育學會實驗室研究會項目(GDJ2016011);廣東省“攀登計劃”專項資金(pdjh2017b0537);廣東省大學生創新創業訓練項目(XJ2017092);佛山市科技計劃公共服務能力提升項目(2017)
苗晴(1982-),女,河南遂平人,講師,碩士,主要從事最優化信號處理、圖像處理研究﹒E-mail: miaoqing598@163.com
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
石家莊鐵路職業技術學院學報(2019年3期)2019-10-30 03:26:32
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
航天返回與遙感(2014年4期)2014-07-31 17:47:47
長江大學學報(自科版)(2014年7期)2014-03-20 13:21:02