艦船用新型高效低噪電動舵機技術(shù)研究
2018-07-25 06:30:26陳俊杰馬德森汪遠銀趙國平姜麗婷
艦船科學(xué)技術(shù) 2018年7期
關(guān)鍵詞:系統(tǒng)
陳俊杰,馬德森,汪遠銀,趙國平,姜麗婷,韓 旭
(北京精密機電控制設(shè)備研究所,北京 100076)
0 引 言
降低噪聲、提高聲隱身性能已成為當(dāng)今世界艦船設(shè)計中的一場革命[1],操舵裝置是控制航向和姿態(tài)的重要安全設(shè)備,傳統(tǒng)液壓操舵裝置由于自身系統(tǒng)架構(gòu)的設(shè)計缺陷,存在噪聲大、效率低以及可靠性差等固有缺點[2–4]。隨著液壓技術(shù)向高壓、高速、大流量、高功率發(fā)展,液壓系統(tǒng)噪聲問題更加突出。就艦船液壓系統(tǒng)而言,更加注重設(shè)備的低噪聲特性[5]。解決上述問題的關(guān)鍵是摒棄傳統(tǒng)液壓舵機“集中供油,功率液傳”的設(shè)計思想,研制新型的功率電傳作動系統(tǒng),以減少或取消液壓管路,抑制機械振動和液壓沖擊的傳播,減少液壓系統(tǒng)的節(jié)流和溢流作用,在降低高頻噪聲的同時提高能源利用率[6]。
目前,主流的功率電傳作動系統(tǒng)解決方案有機電作動器(Electro-Mechanical Actuator)和電液作動器(Electro-Hydraulic Actuator)2 個方向[7]。英國海軍研制了用于水面艦船及潛艇舵面控制的電動舵機,通過在23型護衛(wèi)艦上進行試驗和測試,證明其具有噪聲低、可靠性高、維護簡單、耗能少等優(yōu)點[8]。
基于電動舵機的上述優(yōu)點,本文提出一種艦船用新型電動舵機方案,并開展樣機的可靠性和減振降噪設(shè)計,進行性能試驗和振動噪聲測試試驗,以掌握其操縱性能和振動噪聲水平。
1 電動舵機方案
1.1 電動舵機原理
電動舵機系統(tǒng)由控制驅(qū)動器、伺服電機和減速傳動裝置及位置傳感器等構(gòu)成。根據(jù)操控系統(tǒng)發(fā)出的指令,由控制驅(qū)動器根據(jù)指令信號分析運算,輸出相應(yīng)的電信號驅(qū)動伺服電機轉(zhuǎn)動,電機經(jīng)減速傳動裝置帶動作動桿往復(fù)運動驅(qū)動舵面轉(zhuǎn)動,經(jīng)位置傳感器反饋形成位置閉環(huán)的伺服系統(tǒng),如圖1所示。
1.2 電動舵機方案
圖2所示為艦船用新型電動舵機系統(tǒng)示意圖,該舵機主要由控制驅(qū)動器、伺服電機、行星滾柱絲杠減速傳動裝置及線纜等組成。電機通過行星滾柱絲杠,將旋轉(zhuǎn)運動轉(zhuǎn)換為直線運動,從而推拉舵桿、舵柄,使舵葉轉(zhuǎn)動,改變船舶的航向。
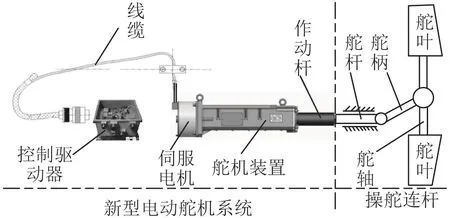
圖2 電動舵機系統(tǒng)圖Fig.2 The system diagram of the electro-mechanical actuator
該電動舵機的主要性能指標如表1所示,額定輸出推力300 kN。為達到上述指標,伺服電機選擇了永磁同步電機,減速傳動裝置核心零部件選擇行星滾柱絲杠。其主要參數(shù)如表2所示。
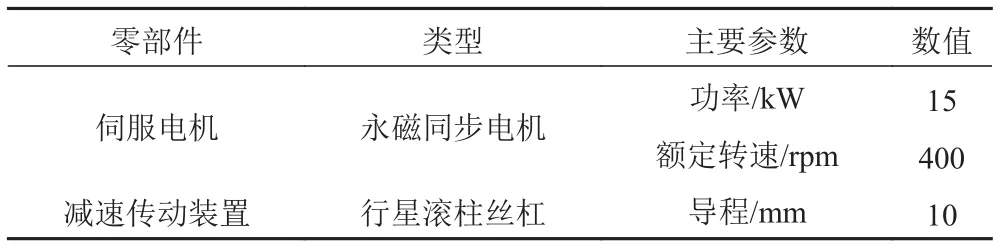
表1 電動舵機主要性能指標Tab.1 Main parameter of the electro-mechanical actuator
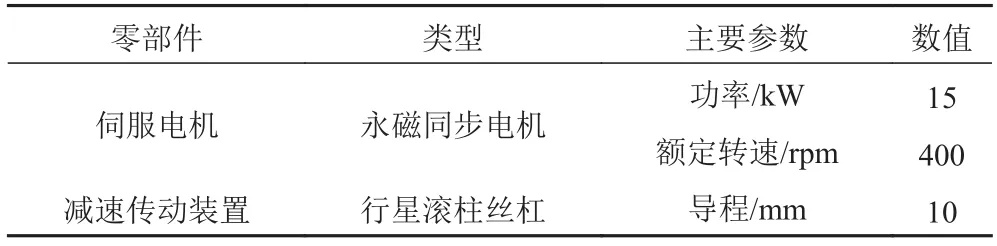
表2 電動舵機的基本配置Tab.2 Basic configuration of the electro-mechanical actuator
艦船操控系統(tǒng)將控制信號通過CAN數(shù)字總線或模擬傳輸線傳送至控制驅(qū)動器。控制驅(qū)動器接收舵葉擺角指令,反饋狀態(tài)數(shù)據(jù),運行閉環(huán)控制算法,控制電動舵機按要求動作,最終達到控制艦船舵葉姿態(tài)的目的。同時,控制驅(qū)動器將各單機狀態(tài)信息實時采集,并通過CAN總線或模擬傳輸線發(fā)送回艦船操控系統(tǒng),由此完成自檢、測試功能。控制驅(qū)動器通過控制芯片及傳感器,實現(xiàn)電機電流、電機轉(zhuǎn)速、電動舵機位移三環(huán)的閉環(huán)控制,如圖3所示。當(dāng)操控臺發(fā)送位置指令時,控制驅(qū)動器調(diào)整電機的轉(zhuǎn)速和需要的電流,以維持在指定位置。
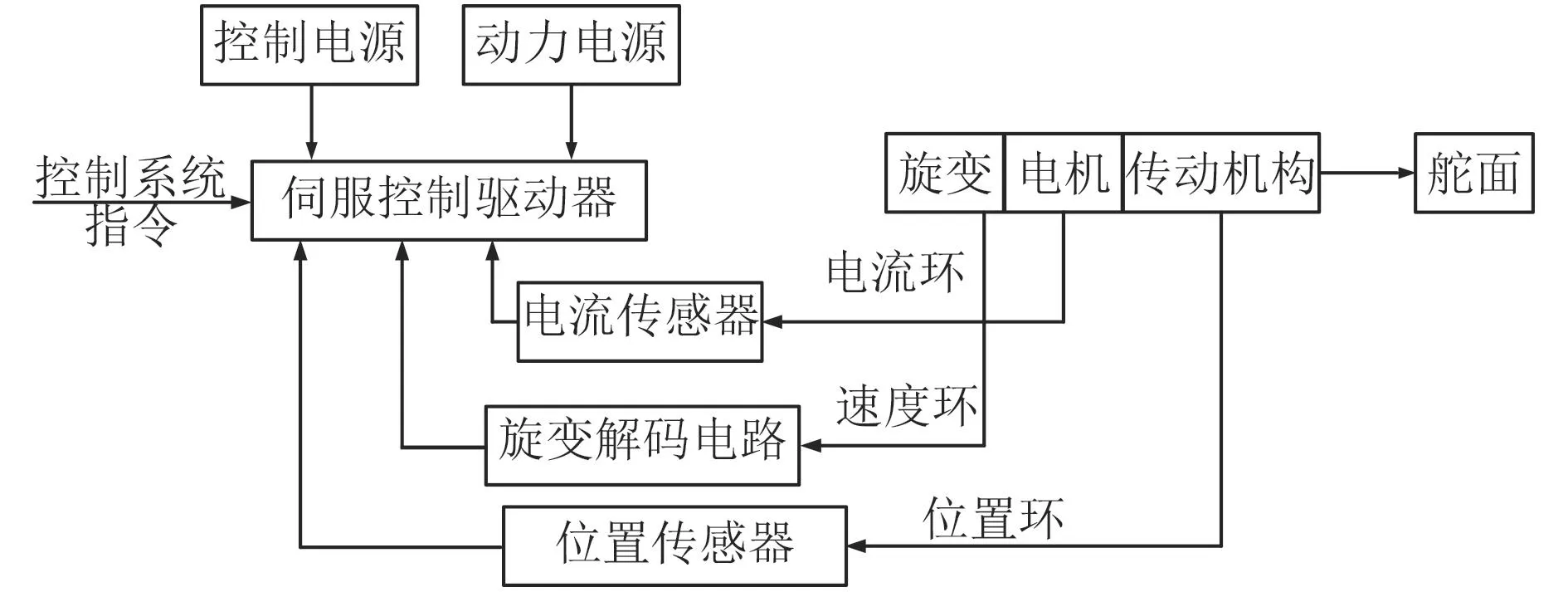
圖3 電動舵機控制框圖Fig.3 Control diagram of the electro-mechanical actuator
2 電動舵機研制
2.1 高可靠性減速傳動裝置
電動舵機的減速傳動裝置采用直線一體式結(jié)構(gòu)設(shè)計方案,主要由行星滾柱絲杠、支撐組件和其他直屬件等組成。伺服電機的旋轉(zhuǎn)運動通過行星滾柱絲杠轉(zhuǎn)換為作動桿直線伸縮運動,不需要另添加中間齒輪減速箱,能夠有效降低系統(tǒng)的振動噪聲,并減少故障環(huán)節(jié),提高整體可靠性。
行星滾柱絲杠與滾珠絲杠的結(jié)構(gòu)相似,區(qū)別在于行星滾柱絲杠載荷傳遞元件為螺紋滾柱,是典型的線接觸;而滾珠絲杠載荷傳遞元件為滾珠,是點接觸,因此行星滾柱絲杠有眾多的螺紋接觸線來支撐負載,承載力大,且兼具更高的抗沖擊能力。
行星滾柱絲杠和支撐軸承的潤滑采用定期加注潤滑脂的方式,改善行星滾柱絲杠副和支撐軸承的運行環(huán)境,延長使用壽命。
減速傳動裝置采用增加輔助支撐的方式提高可靠性。作動桿由于舵面所受的工況比較復(fù)雜,易產(chǎn)生不規(guī)則的運動和不同頻率的振動,從而發(fā)生噪聲現(xiàn)象。作動桿在承受來自舵面的軸向力后容易產(chǎn)生徑向分力,而作動桿的運動行程又比較長,這時輔助徑向支撐就很重要,能夠有效的降低作動桿承受的彎矩。
電動舵機一體化高可靠性結(jié)構(gòu)如圖4所示。該結(jié)構(gòu)具有以下幾方面特點:
1)伺服電機、減速傳動裝置形成串聯(lián)結(jié)構(gòu)形式,取消了齒輪減速箱環(huán)節(jié),大大減小了電動舵機的體積和重量。
2)伺服電機殼體、減速傳動裝置殼體之間相互連接,形成一個完整的結(jié)構(gòu)件,提高了組件之間的連接強度和承載能力。
3)該結(jié)構(gòu)要求各組件殼體為同一種材料,尤其在高低溫環(huán)境下材料特性能夠保持高度一致。
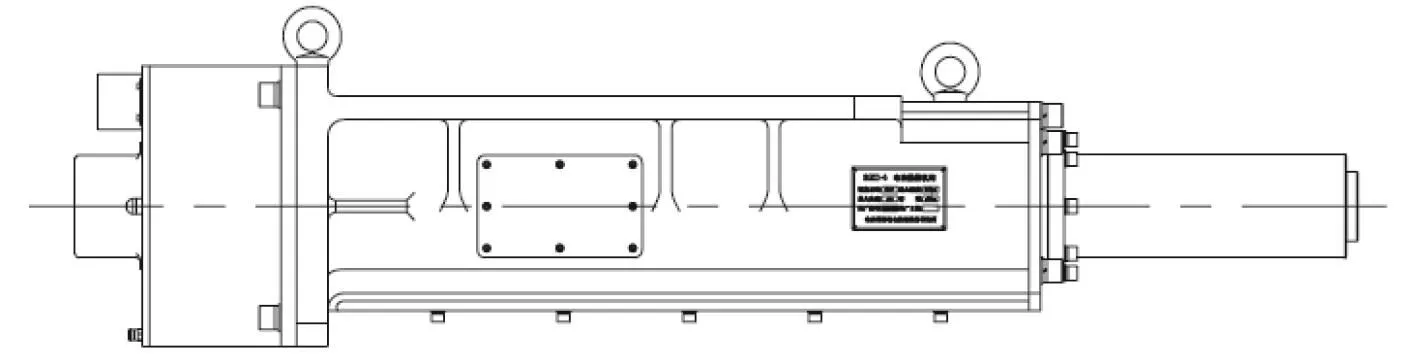
圖4 一體化本體結(jié)構(gòu)示意圖Fig.4 The scheme of incorporate configuration
2.2 高效低噪伺服電機
伺服電機是電動舵機的重要動力元件。伺服電機需全工況變轉(zhuǎn)速運行,低噪聲電機的設(shè)計與制造至關(guān)重要。艦船舵面負載一般幾噸到幾十噸不等甚至更多,同時工作時間一般較長,另外對于整機系統(tǒng)減振降噪要求相對較高。針對上述問題,考慮到艦船打舵速度要求不高,將承載大、低脈動、可大力矩長時工作的永磁同步電機視為首選。
1)永磁同步電機減振降噪設(shè)計
為了更好的實現(xiàn)減振降噪,伺服電機設(shè)計采用了PMSM永磁同步電機技術(shù)。在設(shè)計時,優(yōu)化齒槽設(shè)計,從源頭上降低了電機自身的振動噪聲。
2)永磁同步電機可靠性設(shè)計
伺服電機在設(shè)計過程中充分考慮了產(chǎn)品的可靠性,采取了大量提高產(chǎn)品可靠性的措施,具體如下:
①轉(zhuǎn)子軛采用多邊形結(jié)構(gòu),確保永磁體緊固性。
②采用帶有防塵蓋的深溝球軸承,并嚴格控制軸承軸向、徑向游隙,同時裝配前電機轉(zhuǎn)子進行動平衡試驗,防止電機轉(zhuǎn)子卡死;對電機進行強度和剛度校核,確保電機能夠可靠承受工作應(yīng)力。
③優(yōu)化熱設(shè)計,調(diào)整定子鐵心的結(jié)構(gòu)尺寸、增加槽面積來增加繞組股數(shù)以降低繞組線圈電流密度,減少發(fā)熱,并采用耐熱導(dǎo)線、磁鋼和絕緣材料等確保伺服電機能夠可靠承受工作中產(chǎn)生的熱量,不致燒毀。
2.3 變增益高精度控制算法
當(dāng)電動舵機處于工作狀態(tài)時,正常情況下,采用數(shù)字通信模式,一旦模擬通信開關(guān)被觸發(fā),則模擬通信指令優(yōu)先級大于數(shù)字通信指令,電動舵機控制舵面按照模擬通信指令要求動作。電動舵機在熱備份狀態(tài),可迅速切換至工作狀態(tài);在工作狀態(tài),可通過完備的通信系統(tǒng)進行位置指令的接收。
不同通信方式切換所帶來的電機速度突變抖動問題亟待解決,電壓隨著艦船上用電設(shè)備的動態(tài)變化而大范圍波動,也是電機速度突變抖動的一個原因,因此,變電壓力矩電機穩(wěn)速方法變得尤為重要。具體技術(shù)由以下幾個方面:
1)不同通信模式切換下的電機速度無縫切換技術(shù)
數(shù)字控制采用位置控制,模擬控制采用速度控制,模擬控制的優(yōu)先級高。當(dāng)數(shù)字控制向模擬控制切換時,通過捕捉當(dāng)前速度,由位置環(huán)控制直接切換到速度環(huán)控制,保持速度穩(wěn)定,實現(xiàn)模式切換下的電機速度無縫切換。
2)寬范圍電壓動態(tài)變化條件下的電機PI參數(shù)自適應(yīng)技術(shù)
除了船舶在高速工況外,凡航行工況下使用的設(shè)備其電壓變化范圍為 175 ~320 V 或者 370~640 V[9]。本文研究的新型電動舵機所考慮的范圍是后者,即研究直流供電電壓在370 ~640 V范圍內(nèi)變化時,電機工作特性變化情況及其對操舵裝置性能的影響。
通過電壓分段線性擬合的方法,自適應(yīng)尋找不同電壓下的電流環(huán)PI參數(shù),通過電流環(huán)和速度環(huán)的雙閉環(huán)調(diào)節(jié),使電機的速度穩(wěn)定無抖動。實驗測量發(fā)現(xiàn),實驗結(jié)果與理論分析結(jié)果相吻合。
3)高精度快響應(yīng)無沖擊的伺服控制算法技術(shù)
其核心是采用磁場定向控制算法。在電流環(huán)、速度環(huán)、位置環(huán)均采用了帶抗積分飽和的PID控制算法。通過調(diào)節(jié)比例系統(tǒng)P、積分系數(shù)I及抗積分飽和系數(shù),使系統(tǒng)控制指標達到了快速穩(wěn)定無超調(diào)。同時對輸入指令采用斜坡算法,避免了輸入指令變化太大的沖擊。
通過以上參數(shù)的相互匹配,最終達到了最大負載換向時電流無沖擊,最大速度時速度換向無沖擊,到達指定位置時無超調(diào),從而實現(xiàn)了整個系統(tǒng)在各種工況進行時平穩(wěn)無沖擊無振動。
2.4 電動舵機樣機研制
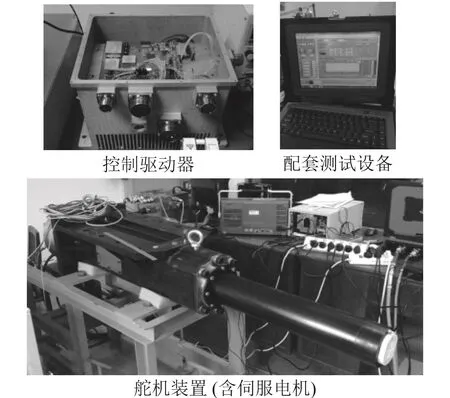
圖5 電動舵機系統(tǒng)樣機Fig.5 The prototype of electro-mechanical actuator
3 電動舵機性能試驗
3.1 加載模擬試驗裝置
加載模擬試驗裝置主要為電動舵機提供模擬負載,以測試其帶載工況下的具體性能特性。
加載模擬試驗裝置主要由試驗臺、液壓缸、伺服閥、液壓泵和電動機、蓄能器、冷卻系統(tǒng)、油源及傳感器等構(gòu)成。電動舵機在加載試驗臺安裝如圖6所示。
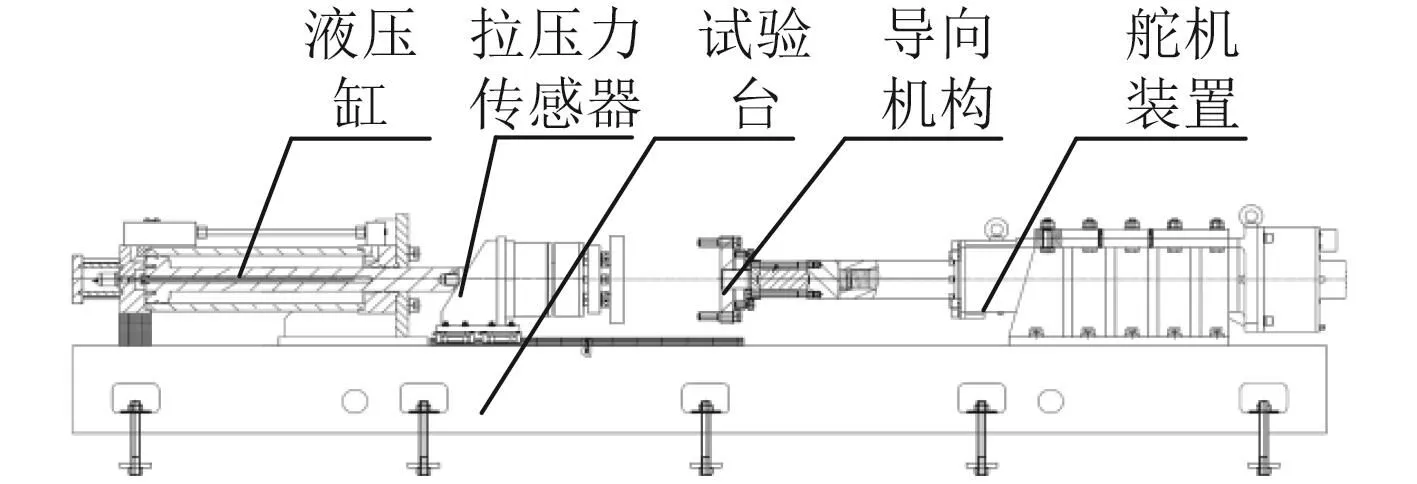
圖6 電動舵機加載裝置Fig.6 The electro-mechanical actuator loading device
3.2 加載模擬試驗方法
負載模擬試驗在伺服控制功能、電機可靠性驗證、傳動裝置關(guān)鍵件疲勞壽命、舵機裝置效率及振動噪聲測試等多個方面進行考核。電動舵機加載模擬試驗如圖7所示。
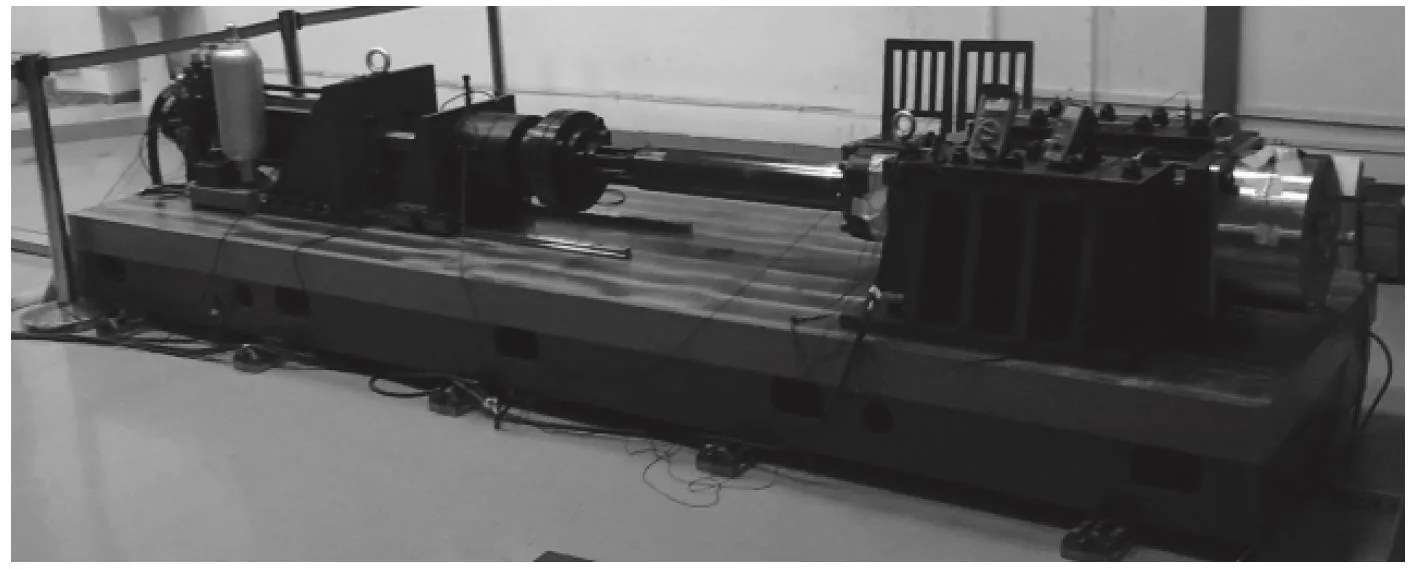
圖7 電動舵機加載模擬試驗Fig.7 Loading simulation test of the electro-mechanical actuator
1)負載試驗
調(diào)整加載系統(tǒng),使舵機按最大工作力(30 t)的25%、50%、75%、100%的負載工作,在上述各種工況下,電動舵機輪流在行程范圍內(nèi)操舵輸入幅值為+150 mm的階躍位置指令信號,觀察其實際位移輸出。
由圖8試驗結(jié)果可知,在規(guī)定的行程范圍內(nèi),電動舵機樣機從位置0 mm到位置+150 mm的運動時間為5 s,由此可知,電動舵機最大平均速度為30 mm/s,由樣機在穩(wěn)定位置輸出可知,樣機的穩(wěn)態(tài)最大誤差為±0.5 mm。舵機速度和穩(wěn)態(tài)誤差經(jīng)過位移與舵角換算,均能滿足艦船用電動舵機的操縱性要求。
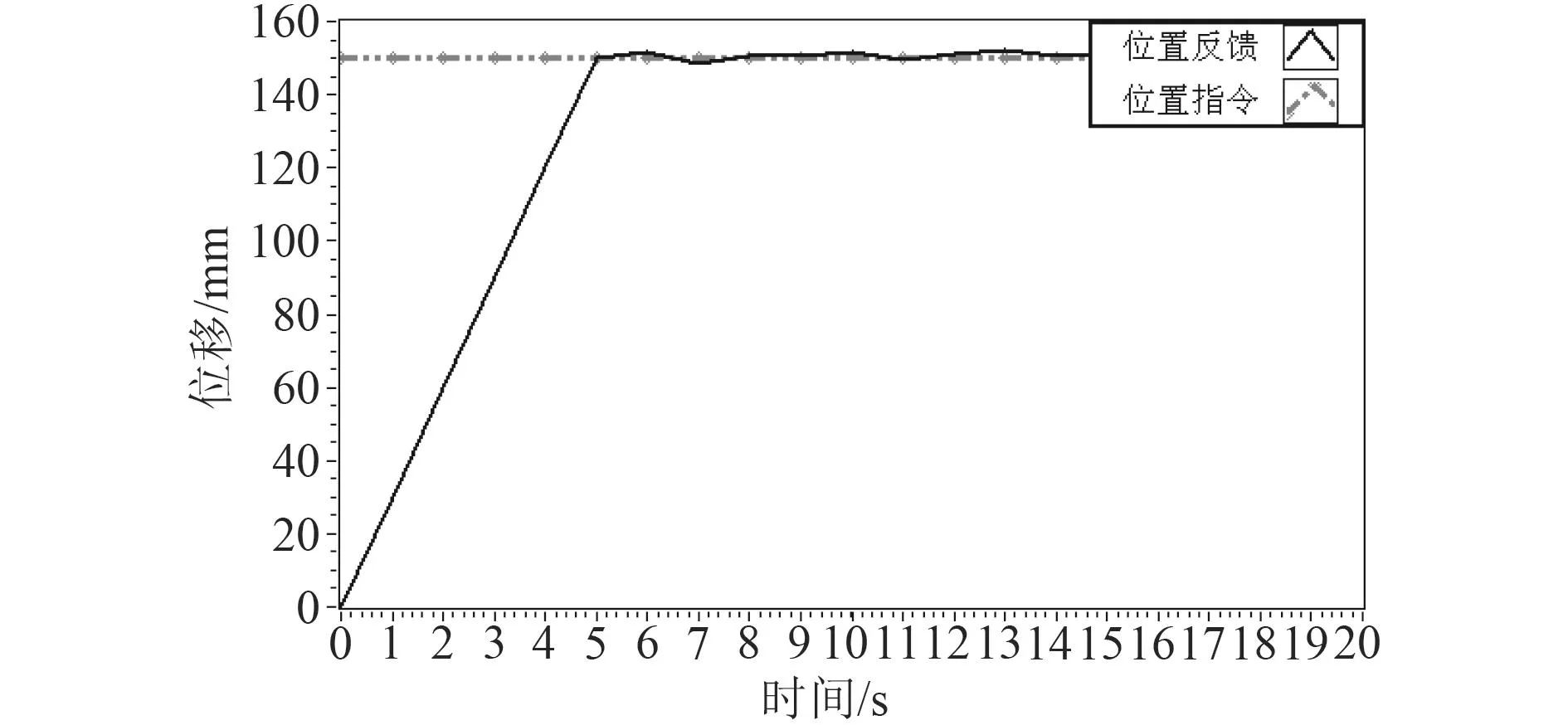
圖8 電動舵機階躍位移響應(yīng)試驗結(jié)果Fig.8 The test results of step displacement response
同時,電動舵機位置保持過程中,電機低速待機,具有發(fā)熱小、能耗低的優(yōu)點。
2)耐久性試驗
為快速評定電動舵機的可靠性指標,耐久性試驗采用了加速試驗的方案,通過強化試驗條件,以便在較短的時間內(nèi)獲得必要數(shù)據(jù),來評估電動舵機正常條件下的可靠性或壽命指標。
再好的目標都需要行動去實現(xiàn)。目標不能僅僅停留在口頭上,目標需要腳踏實地的行動,只有這樣,才能推動目標的達成。
耐久性試驗共按4個周期,每個周期7天。每天24 h 一個典型工況(6 t、9 t、10 t、12 t、15 t、25 t、30 t),每個工況無間斷運行24 h,考慮舵機實際工作存在反操縱力,負載模擬曲線設(shè)計如圖9所示。
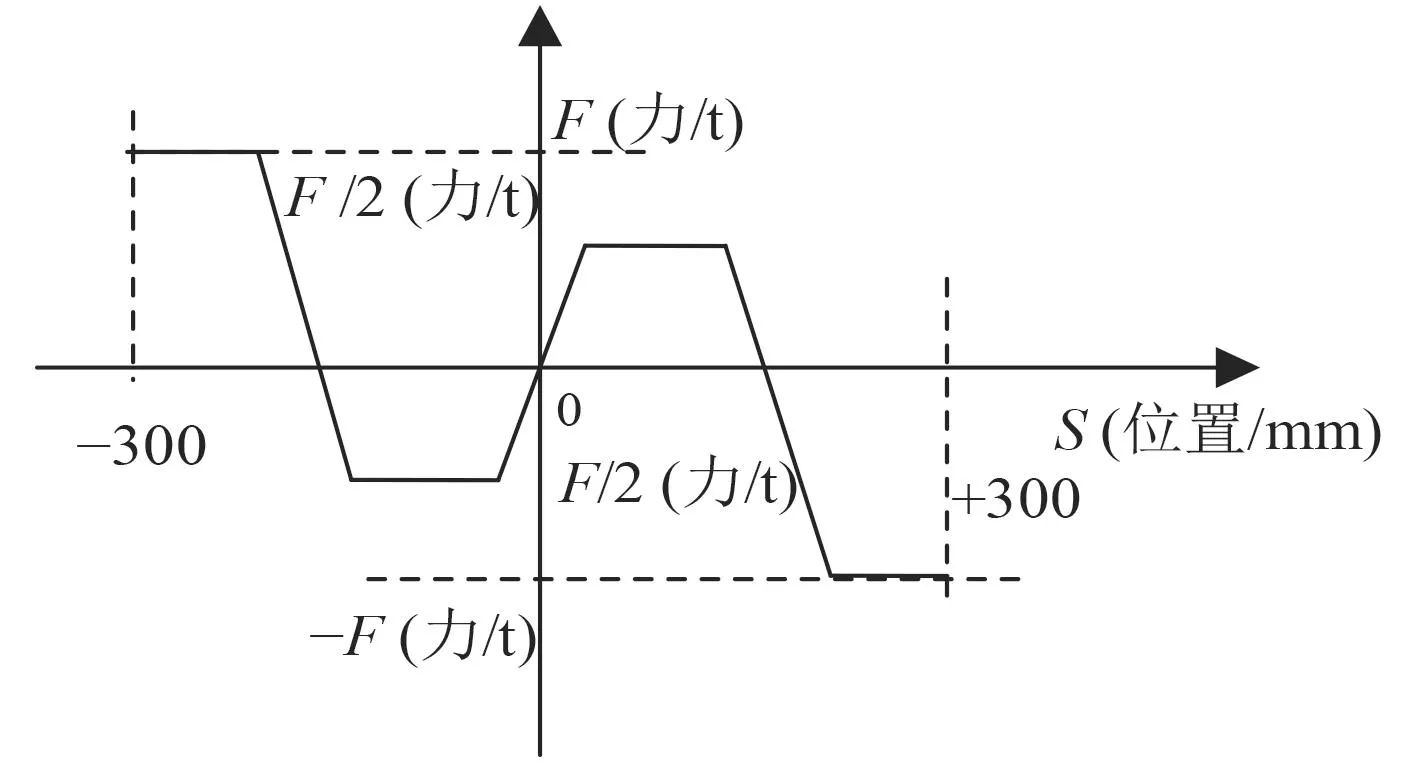
圖9 負載模擬曲線特性圖Fig.9 Characteristic curve chart of loading simulation
按照該曲線加載,試驗結(jié)果表明,電動舵機最終達到了最大負載換向時電流無沖擊,最大速度時速度換向無沖擊,到達指定位置時無超調(diào),從而實現(xiàn)了整個系統(tǒng)在各種工況進行時平穩(wěn)無沖擊無振動。聯(lián)試過程中,電動舵機系統(tǒng)在控制驅(qū)動器的控制下,運行精準、平穩(wěn)。
試驗過程對伺服電機、減速傳動裝置、控制驅(qū)動器的溫度每隔半小時進行采集,各項溫度監(jiān)測平均值如表3所示。
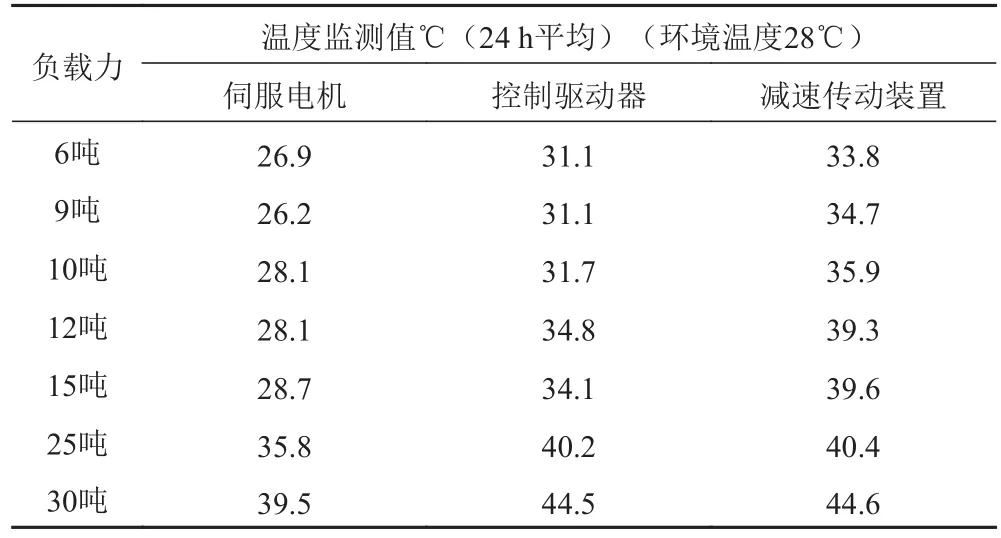
表3 電動舵機系統(tǒng)試驗平均溫度統(tǒng)計表Tab.3 Average temperature of electro-mechanical actuator
由表3可以看出,隨著航速的不斷提高,電動舵機各部件表面的溫度呈上升趨勢,最大負載下,電機、控制器、傳動裝置等溫升比環(huán)境溫度高出近20 ℃,均在正常工作范圍內(nèi)。
3)舵機裝置效率測試
根據(jù)旋轉(zhuǎn)與直線運動過程中功率不變的原則,有式(1)所示,伺服電機轉(zhuǎn)速與絲杠線位移關(guān)系有式(2)所示。


式中:F為加載力;v為電動舵機線位移速度;T為伺服電機輸出轉(zhuǎn)矩;n為伺服電機轉(zhuǎn)速;η為效率;p為導(dǎo)程。
伺服電機相電流峰值Iq與輸出轉(zhuǎn)矩之間的關(guān)系為電機固有值,通過檢測試驗過程中的電機相電流峰值Iq可知其輸出轉(zhuǎn)矩T的大小。液壓加載臺液壓缸與電動舵機之間安裝有拉壓力傳感器,用以檢測液壓缸的實時加載力F。
由式(1)、式(2)可得舵機裝置效率計算公式如式(3)所示。

因此,實時讀取任意位移的加載力及伺服電機相電流,可以計算得到舵機裝置的效率。耐久性試驗過程中,加載力6~30t的范圍內(nèi),舵機裝置效率在65%~75%之間波動。
4)振動噪聲測試
電動舵機的振動加速度級測量方法[10]如下:
①將電動減速傳動裝置剛性固定在公共基座上,測點分別固定于電動舵機機腳面板上緊固螺栓處、前后兩端軸承頂部、負載模擬系統(tǒng)機腳(位于舵桿軸線下方)、導(dǎo)向連接機構(gòu)上等,以上測點測量xyz三個方向振動。
②空氣噪聲測量點距離電動舵機、模擬負載、導(dǎo)向機構(gòu)均為1 m,位于導(dǎo)向機構(gòu)上方正對舵軸位置。
③根據(jù)振動檢測數(shù)據(jù)顯示,在10~8 kHz頻域范圍內(nèi),在相同工況下及測量點,新型電動舵機機腳處的總級優(yōu)于原液壓操舵裝置10~15 dB,空氣噪聲測量結(jié)果≤65 dB。由此可見,電動舵機在減振降噪上取得了明顯的效果,并實現(xiàn)了整個系統(tǒng)在各種工況進行時平穩(wěn)無沖擊無振動。
4 結(jié) 語
本文從降低艦船操舵系統(tǒng)噪聲角度出發(fā),提出了一種新型電動舵機系統(tǒng)的架構(gòu)設(shè)計,從原理上降低了系統(tǒng)噪聲,結(jié)合各單機零部件的可靠性與減振降噪設(shè)計研究,研制出了樣機。同時,對該電動舵機進行了耐久性試驗和效率及振動噪聲測試,結(jié)果表明,該新型電動舵機性能可滿足船舶的操縱要求,并在很大程度上提高了操舵裝置的減振降噪水平。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32