GPS/Galileo/BDS系統(tǒng)測(cè)距信號(hào)精度分析與評(píng)價(jià)
2018-07-21 02:56:02劉國(guó)燕丁藝偉汪登輝
測(cè)繪工程 2018年8期
關(guān)鍵詞:系統(tǒng)
劉國(guó)燕,沈 飛,丁藝偉,汪登輝
(1.南京工業(yè)職業(yè)技術(shù)學(xué)院 電氣工程學(xué)院,江蘇 南京 210023;2.江蘇北斗衛(wèi)星應(yīng)用產(chǎn)業(yè)研究院有限公司,江蘇 南京 210032;3.東南大學(xué) 儀器科學(xué)與工程學(xué)院,江蘇 南京 210096;4.東南大學(xué) 交通學(xué)院,江蘇 南京 210096)
我國(guó)基于對(duì)位置追蹤、軍事、安全等方面的考慮,自主研發(fā)了北斗導(dǎo)航衛(wèi)星系統(tǒng)(BeiDou Navigation Satellite System,BDS),目前正從區(qū)域運(yùn)行向全球拓展,處于快速發(fā)展之中。截止至2016年6月,BDS系統(tǒng)已經(jīng)成功發(fā)射了第23顆導(dǎo)航衛(wèi)星,計(jì)劃于2020年前后,完成35顆衛(wèi)星發(fā)射組網(wǎng),成為覆蓋全球的導(dǎo)航衛(wèi)星系統(tǒng)[1]。測(cè)距信號(hào)的 精度是保證高精度定位的重要基礎(chǔ),Montenbruck O等通過(guò)三頻載波相位無(wú)幾何消電離層組合,初步分析了BDS的GEO/IGSO衛(wèi)星載波相位觀測(cè)值誤差[2];Yang等通過(guò)零基線單差法對(duì)BDS系統(tǒng)的三類導(dǎo)航衛(wèi)星(GEO/IGSO/MEO)的碼和載波相位觀測(cè)值精度進(jìn)行了評(píng)估[3];程鵬飛等從偽距相位差組合觀測(cè)值和多路徑延遲值兩方面,對(duì)比分析了GPS和BDS衛(wèi)星的測(cè)距信號(hào)質(zhì)量[4];何暢等通過(guò)三頻無(wú)幾何消電離層組合及零基線雙差法,從載波相位觀測(cè)值多路徑誤差及觀測(cè)精度方面,分析了BDS三頻載波相位觀測(cè)值質(zhì)量情況[5]。
基于以上研究工作,本文利用零基線雙差法對(duì)BDS系統(tǒng)3種不同類型衛(wèi)星的測(cè)距信號(hào)精度進(jìn)行評(píng)估,對(duì)比其與GPS/Galileo系統(tǒng)的測(cè)距信號(hào)精度,并分析不同類型接收機(jī)間的內(nèi)部噪聲水平情況。
1 測(cè)距信號(hào)精度評(píng)估方法
1.1 CDMA信號(hào)系統(tǒng)雙差觀測(cè)方程
對(duì)于GPS、Galileo、BDS等CDMA信號(hào)的衛(wèi)星系統(tǒng),載波波長(zhǎng)一定,其偽距雙差和載波雙差觀測(cè)方程為:
(1)
1.2 零基線雙差觀測(cè)方程
零基線檢測(cè)法,是將多臺(tái)接收機(jī)通過(guò)功率分配器連接至同一天線,接收相同的衛(wèi)星信號(hào)。其中任意兩臺(tái)接收機(jī)的觀測(cè)數(shù)據(jù)解算出的基線,理論長(zhǎng)度為0[6]。
零基線雙差檢測(cè)法消除了衛(wèi)星鐘差、接收機(jī)鐘差、衛(wèi)星軌道誤差、電離層與對(duì)流層延遲誤差、多路徑誤差等,表達(dá)式如下:
(2)

(3)

觀測(cè)值噪聲主要是由接收機(jī)內(nèi)部噪聲引起的,通過(guò)系統(tǒng)間觀測(cè)值殘差的對(duì)比分析及基線坐標(biāo)偏差,可以反映接收機(jī)間內(nèi)部噪聲水平情況。
2 實(shí)驗(yàn)結(jié)果與分析
2.1 實(shí)驗(yàn)設(shè)備及數(shù)據(jù)來(lái)源
為了驗(yàn)證GPS/Galileo/BDS三系統(tǒng)零基線解算效果,選取Curtin大學(xué)樓頂CUT00站下的3組零基線數(shù)據(jù)進(jìn)行實(shí)驗(yàn)分析。觀測(cè)時(shí)間為2015-01-18,持續(xù)觀測(cè)時(shí)間為24 h,數(shù)據(jù)采樣間隔為30 s,觀測(cè)數(shù)據(jù)包含GPS/Galileo/BDS三系統(tǒng)雙頻觀測(cè)值。3組零基線采用的接收機(jī)及天線設(shè)備如圖1所示。

圖1 實(shí)驗(yàn)數(shù)據(jù)設(shè)備
采用基線CUT0-CUT2、CUT1-CUT2及CUT3-CUT2 3組零基線數(shù)據(jù),對(duì)其1 d的觀測(cè)數(shù)據(jù),分析系統(tǒng)間觀測(cè)值殘差及三維坐標(biāo)偏差。
2.2 觀測(cè)值殘差結(jié)果分析
選取CUT0-CUT2組數(shù)據(jù),分析觀測(cè)值殘差情況。主要從碼觀測(cè)值殘差與高度角的關(guān)系、不同系統(tǒng)間觀測(cè)值殘差及不同接收機(jī)間觀測(cè)值殘差進(jìn)行對(duì)比分析。
2.2.1 碼觀測(cè)值殘差與衛(wèi)星高度角的關(guān)系
選取GPS的G09(BLOCK IIF),畫(huà)出該衛(wèi)星出現(xiàn)的時(shí)段,將其高度角與L1及L2頻段上的碼觀測(cè)值殘差的變化情況進(jìn)行分析,如圖2所示。
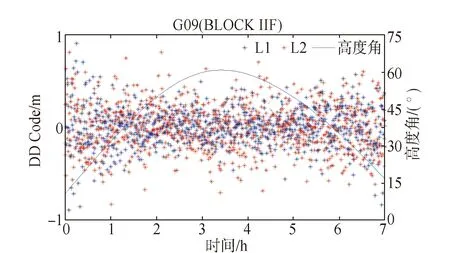
圖2 碼觀測(cè)值殘差與衛(wèi)星高度角的關(guān)系
根據(jù)圖2發(fā)現(xiàn),隨著衛(wèi)星高度角的增大,碼觀測(cè)值殘差有隨之變小的趨勢(shì)。可見(jiàn),隨著衛(wèi)星高度角的升高,接收機(jī)噪聲對(duì)測(cè)距信號(hào)精度的影響變小,因此,為了提高定位精度,在可見(jiàn)衛(wèi)星充足的情況下,盡量選擇大高度角的衛(wèi)星可一定程度上減小測(cè)距信號(hào)精度的損失。
2.2.2 不同系統(tǒng)間觀測(cè)值殘差的情況
考慮不同導(dǎo)航系統(tǒng)及不同類型的衛(wèi)星情況,分別選取G10、G14、G15、G30、E12、E19、C01、C09、C12共9顆衛(wèi)星的觀測(cè)值殘差加以分析。由于Galileo可觀測(cè)衛(wèi)星數(shù)只有12和19號(hào)衛(wèi)星,且觀測(cè)時(shí)間有1.5 h,故均參與該項(xiàng)數(shù)據(jù)分析。
不同導(dǎo)航定位系統(tǒng)下的各顆衛(wèi)星的觀測(cè)值殘差分布情況如圖3—圖4所示,其標(biāo)準(zhǔn)差如表1所示,可以看出:

圖3 不同系統(tǒng)下零基線雙差載波相位觀測(cè)值殘差分布情況
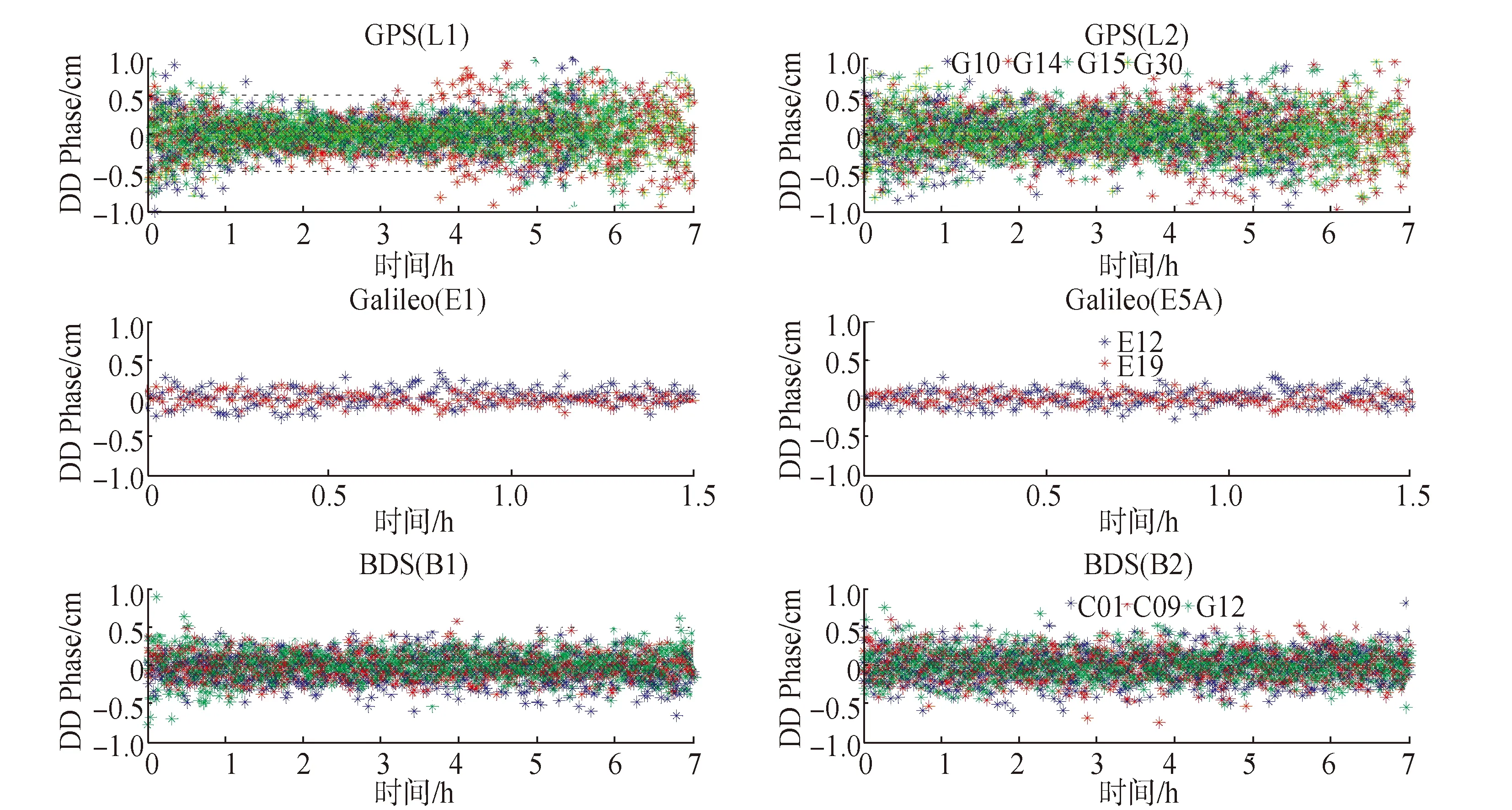
圖4 不同系統(tǒng)下零基線雙差碼觀測(cè)值殘差分布情況
1)不同類型間觀測(cè)值殘差中,Galileo的IOV衛(wèi)星觀測(cè)值殘差最小,尤其是E19衛(wèi)星雙頻載波相位殘差標(biāo)準(zhǔn)差分別為1.0 mm和1.0 mm,雙頻偽距殘差為0.08 m和0.07 m,其次是BDS的IGSO衛(wèi)星,而GPS系統(tǒng)的BLOCK IIR型衛(wèi)星觀測(cè)值殘差最大,雙頻載波殘差標(biāo)準(zhǔn)差分別為1.6 mm和2.4 mm,偽距殘差分別為0.29 m和0.31 m。
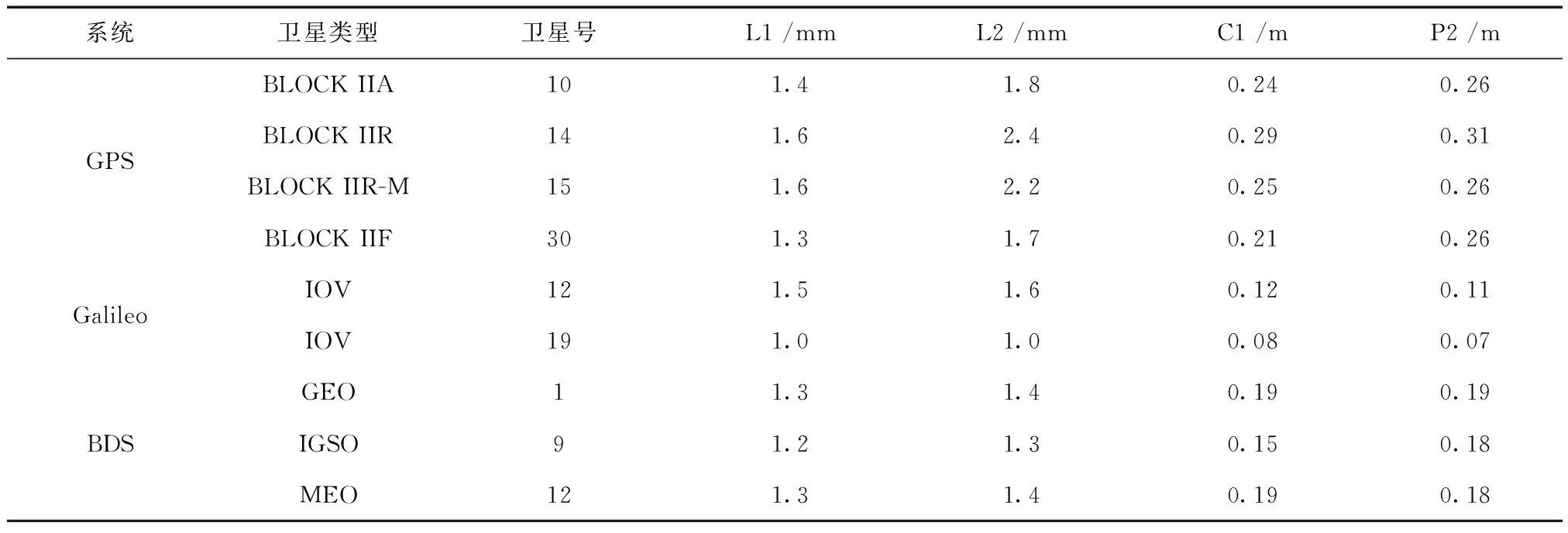
表1 系統(tǒng)零基線雙差觀測(cè)值殘差標(biāo)準(zhǔn)差
2)由圖3及圖4看出,三系統(tǒng)的載波相位觀測(cè)值殘差的變化基本分布在±5 mm,碼觀測(cè)值殘差波動(dòng)范圍基本在±0.5 m。三個(gè)系統(tǒng)中,L1/E1/B1上的觀測(cè)值殘差略小于L2/E5A/B2上的觀測(cè)值殘差。Galileo系統(tǒng)與BDS系統(tǒng)雙頻觀測(cè)值殘差差別不明顯,GPS系統(tǒng)L2上載波觀測(cè)值殘差明顯大于L1上載波相位觀測(cè)值殘差。
3) 通過(guò)比較偽距和載波相位兩種觀測(cè)值的殘差,看出載波相位測(cè)量精度比偽距測(cè)量精度高出兩個(gè)數(shù)量級(jí)。
2.2.3 不同接收機(jī)間觀測(cè)值殘差的情況
選取CUT0-CUT2、CUT1-CUT2兩組零基線數(shù)據(jù)來(lái)對(duì)比分析美國(guó)Trimble公司的NET R9接收機(jī)與比利時(shí)Septentrio公司的POLARX4接收機(jī),通過(guò)分析G14、E19、C09 3顆衛(wèi)星的載波相位觀測(cè)值殘差和碼觀測(cè)值殘差,比較兩臺(tái)接收機(jī)的內(nèi)部噪聲水平。
NET R9與POLARX4兩臺(tái)接收機(jī)關(guān)于G14、E19、C09 3顆衛(wèi)星的觀測(cè)值殘差大小情況如圖5及圖6所示,觀測(cè)值殘差標(biāo)準(zhǔn)差分別如表2、表3所示。

圖5 兩臺(tái)接收機(jī)零基線雙差載波相位觀測(cè)值殘差對(duì)比情況

表2 兩臺(tái)接收機(jī)載波相位觀測(cè)值殘差的標(biāo)準(zhǔn)差mm
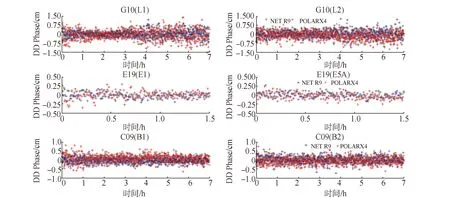
圖6 兩臺(tái)接收機(jī)零基線雙差碼觀測(cè)值殘差對(duì)比情況

表3 兩臺(tái)接收機(jī)碼觀測(cè)值殘差的標(biāo)準(zhǔn)差m
就兩種距離觀測(cè)值殘差的對(duì)比看出,在3種系統(tǒng)下,NET R9和POLARX4接收機(jī)的L1上殘差值均小于L2上殘差值;接收機(jī)間對(duì)比殘差值,發(fā)現(xiàn)NET R9接收機(jī)得出的殘差值較小。
2.3 坐標(biāo)偏差結(jié)果分析
1)實(shí)驗(yàn)方案及結(jié)果總體情況。該實(shí)驗(yàn)分別選取CUT0-CUT2、CUT1-CUT2及CUT3-CUT2 3組零基線1 d的數(shù)據(jù)結(jié)果,計(jì)算三維坐標(biāo)偏差,分為浮點(diǎn)解和固定解兩種解算情況,算得三維坐標(biāo)偏差如圖7—圖9所示。
相對(duì)浮點(diǎn)解,模糊度固定后可以明顯提高解算基線的精度。本文分別在浮點(diǎn)解和固定解兩種情況下,針對(duì)以上3組零基線雙差實(shí)驗(yàn),對(duì)測(cè)得的三維坐標(biāo)偏差統(tǒng)計(jì)標(biāo)準(zhǔn)差,分析其定位精度。
表4中為1 d的觀測(cè)結(jié)果,此表列出了雙差浮動(dòng)解和雙差固定解,對(duì)于零基線,宜采用固定解的結(jié)果。根據(jù)圖1中提供的信息,CUT0、CUT1、CUT2及CUT3采用相同的天線與信號(hào)功分器,分別采用的設(shè)備是TRIMBLE NET R9、SEPTENTRIO POLARX4、TRIMBLE NET R9及JAVAD TRE_G3TH_8設(shè)備。3組基線N、E、U 3個(gè)方向的偏差基本分布在±4 mm,總體不超過(guò)±8 mm,標(biāo)準(zhǔn)差不超過(guò)2.5 mm。

圖9 CUT3-CUT2零基線三維坐標(biāo)偏差

表4 三條零基線檢測(cè)結(jié)果mm
2)不同基線間對(duì)比分析。對(duì)于CUT0-CUT2及CUT1-CUT2兩組數(shù)據(jù),一端連接了相同的設(shè)備NET R9(CUT2站),另一端分別采用NET R9和POLARX4接收機(jī)。從3.2.3節(jié)中對(duì)比的這兩臺(tái)接收機(jī)的觀測(cè)值殘差看出,NET R9設(shè)備的內(nèi)部噪聲水平略低于POLARX4設(shè)備,相應(yīng)的電子學(xué)性能也略優(yōu)。結(jié)合此兩組基線測(cè)得三維坐標(biāo)偏差分析看出,CUT0站采用的NET R9及CUT1站采用的POLARX4精度相當(dāng),測(cè)量精度基本相同,表明此兩臺(tái)設(shè)備均具有良好的定位精度及較低的內(nèi)部噪聲水平。
對(duì)于CUT3-CUT2這組零基線數(shù)據(jù),其固定解的三維坐標(biāo)偏差略大于CUT0-CUT2及CUT1-CUT2,表明CUT3站采用的TRE_G3TH_8接收機(jī)的內(nèi)部噪聲水平略大于NET R9及POLARX4設(shè)備,但總體偏差基本上不超過(guò)±8 mm,仍然具備較好的定位精度。
3 結(jié)束語(yǔ)
對(duì)于CDMA信號(hào)體制的導(dǎo)航衛(wèi)星系統(tǒng),本文選取1 d 3組零基線數(shù)據(jù),兼容GPS/Galileo/BDS三系統(tǒng)雙頻信號(hào),利用零基線雙差法對(duì)其載波相位觀測(cè)值及碼觀測(cè)值進(jìn)行系統(tǒng)間不同類型衛(wèi)星觀測(cè)值殘差對(duì)比,比較了不同類型衛(wèi)星的測(cè)距信號(hào)精度;通過(guò)接收機(jī)間殘差值的對(duì)比,結(jié)合基線解析結(jié)果,比較了3臺(tái)接收機(jī)的內(nèi)部噪聲水平情況。本文采集了1 d的數(shù)據(jù),通過(guò)該方法對(duì)當(dāng)時(shí)測(cè)試環(huán)境下特定的設(shè)備進(jìn)行實(shí)驗(yàn)分析,得出的結(jié)論雖不具備普遍性,但可供借鑒。
[1] 余建斌.中國(guó)北斗致力服務(wù)全球[N].(2016-06-17).http://www.beidou.gov.cn/2016/06/17/20160617710a2bcd9c9545bb958a633d06355eb5.html.
[2] MONTENBRUCK O,HAUSCHILD A, STEIGENBERGER P, et al. Initial assessment of the COMPASS/BeiDou-2 regional navigation satellite system[J]. GPS solutions, 2013, 17(2): 211-222.
[3] YANG Y X, LI J L, WANG A B, et al. Preliminary assessment of the navigation and positioning performance ofBeiDou regional navigation satellite system[J]. Science China. Earth Sciences, 2014, 57(1): 144.
[4] 程鵬飛, 李瑋, 秘金鐘. 北斗導(dǎo)航衛(wèi)星系統(tǒng)測(cè)距信號(hào)的精度分析[J]. 測(cè)繪學(xué)報(bào), 2012, 41(5): 690-695.
[5] 何暢, 蔡昌盛, 趙瑞杰. 三頻北斗載波相位觀測(cè)值質(zhì)量分析[J]. 測(cè)繪, 2015, 38(2): 54-57.
[6] 杜娟, 張會(huì), 劉星, 等. 基于零基線的 GPS/BD2 兼容接收機(jī)精度檢測(cè)方法研究[J]. 艦船電子工程, 2013, 33(7): 121-123.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32