基于凸優化算法的參數不確定輪式移動機器人魯棒PI控制
2018-07-18 01:52:54孫小康
電氣技術 2018年7期
孫小康
(揚州高等職業技術學校,江蘇 揚州 225000)
近些年機器人技術得到了飛速發展,呈現智能化、多元化趨勢,并成功運用于國防、醫院、工業和家庭等領域[1-2]。輪式機器人控制匯集了信息技術、機械技術以及傳感器技術,是機器人研究領域中的一個重要分支,輪式機器人路徑跟蹤的精度影響著整個系統的性能[3-4]。然而輪式移動機器人又是一個多變量、強耦合、參數時變的非線性對象,難以對其進行高性能軌跡跟蹤的控制[5]。近年來,隨著現代控制技術的迅猛發展,一些現代控制方法被廣泛地運用到了輪式機器人軌跡跟蹤控制中,如反推(backstepping)控制[6]、變結構控制[7]、狀態反饋線性化控制[8]、輸入輸出解耦控制[9]、組態方法[10]、粒子群優化算法[11]等。而文獻[5]僅僅是針對輪式機器人的運動學模型設計路徑跟隨器,沒有充分考慮系統摩擦力和參數不確定性對機器人運動性能的不良影響。
盡管傳統的PID控制算法在移動機器人軌跡跟蹤控制的研究上取得了一定成果,但隨著環境的復雜化和不確定性,使得傳統的控制方法已難以達到理想的控制效果。參數不確定對于系統產生的不良影響已經在全橋逆變器的控制領域中有所考慮,但在機器人控制系統中還有所欠缺[12]。
為此,本文主要研究參數不確定的輪式移動機器人路徑跟蹤控制問題。首先建立輪式機器人的動力學模型,并考慮摩擦力和環境的影響,進一步建立其參數不確定動力學模型。在此基礎上設計一種基于凸優化算法的魯棒 PI控制器,引入了 L1性能指標,并給出相關控制律,通過直接求解線性矩陣不等式即可得到控制器參數。最后,仿真結果表明該控制系統能夠準確、快速地跟蹤給定的參考路徑,并能實現同時對給定的線速度、角速度和角度的跟蹤。與常規的PI控制器相比,對于環境和摩擦系數變化產生的不確定性及擾動更具魯棒性。
1 動力學模型
1.1 輪式移動機器人動力學模型建立
在絕對坐標系XOY固定平面內,移動機器人的運動示意圖如圖1所示。
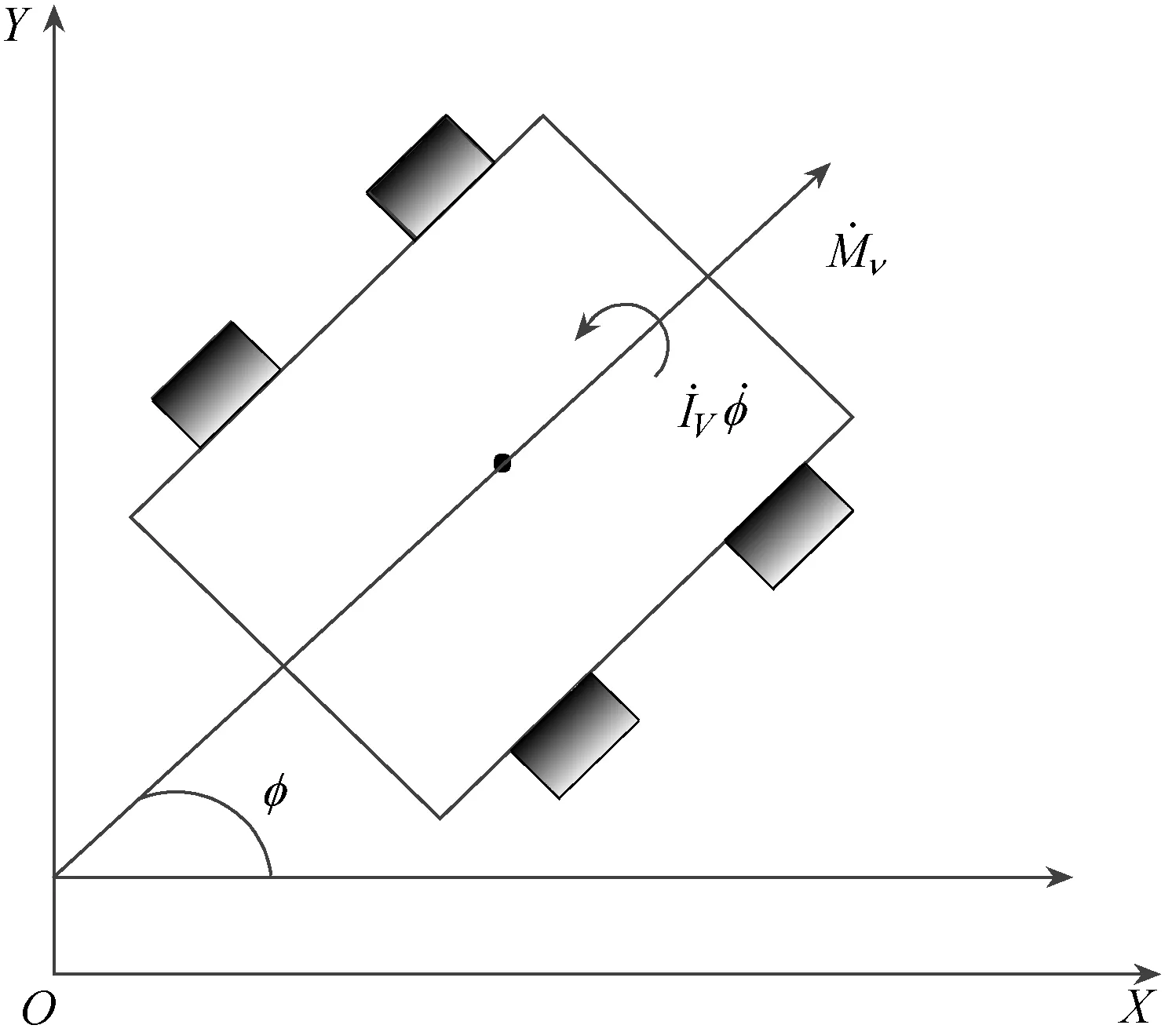
圖1 移動機器人運動示意圖
圖1中,兩個前輪為獨立驅動輪,分別采用一組直流伺服電動機驅動,通過調節各自的輸入電壓控制兩個前輪速度差,達到調整車體與跟蹤路徑的關系。而移動機器人的后輪為隨動輪,僅起支撐車體的作用[5]。輪式移動機器人在忽略縱向滑動的條件下的動力學模型為[13-14]
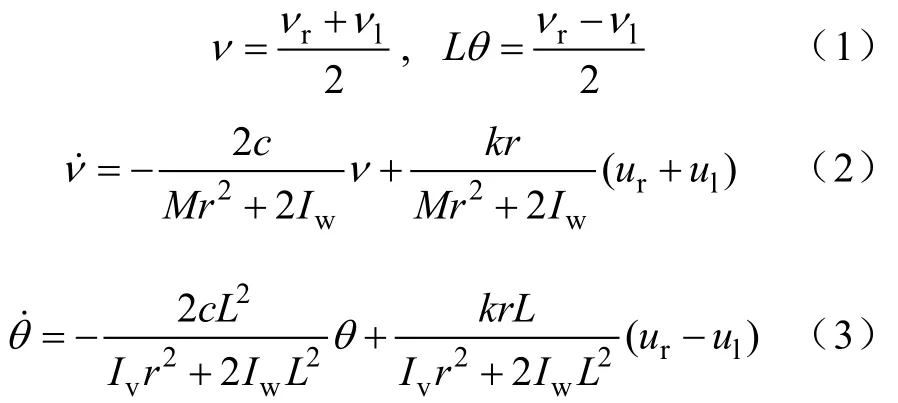
式中,ν為機器人前進線速度,ul和 ur分別為左右電機的驅動電壓,νl和 νr分別為左右驅動輪的線速度,L表示機器人寬度的一半,φ 為機器人方向角,θφ=˙為機器人旋轉角速度,c為輪胎與地面的摩擦系數,M為機器人總質量,r為車輪半徑,k為驅動增益,Iv和Iw分別為繞機器人重心的轉動慣量以及驅動輪的轉動慣量。
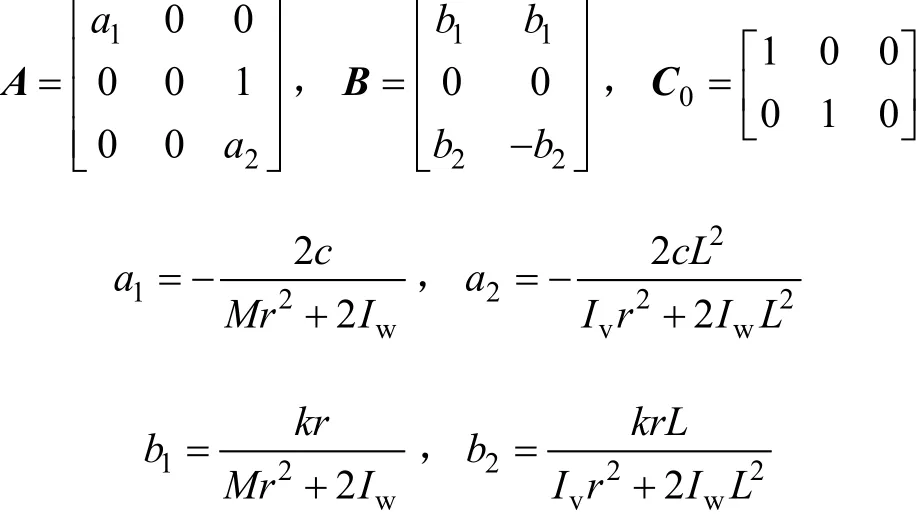
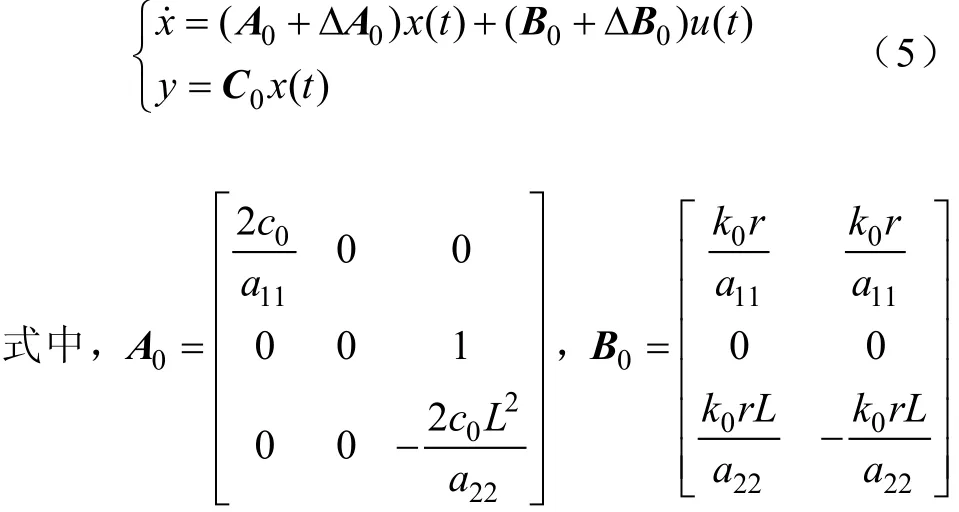
定義:狀態變量 x =[ν φ θ]T,控制輸入 u =,輸出變量 y= [ν φ]T,則根據式(1)至式(3)可得移動機器人的動力學狀態方程為

其中:
1.2 輪式移動機器人參數不確定模型建立
在實際應用中,移動機器人由于傳動系統中減速器存在齒輪間隙,驅動電機的參數由于環境溫度和路面摩擦系數的變化以及元件磨損等因素,都會引起伺服電機傳動力矩的變化,因此,在控制系統的設計中,應充分考慮系統參數電機傳動機構的驅動增益k、摩擦系數c的變化造成的影響。兩種參數的不確定性描述為

此處,c0和 k0為相應的基準值,δc和δk分表代表了摩擦系數及驅動增益變化的比例,且滿足δc≤Δc,δk≤Δk的條件,而Δc和Δk為已知的正常數。因此,輪式移動機器人的參數不確定模型構造如下:
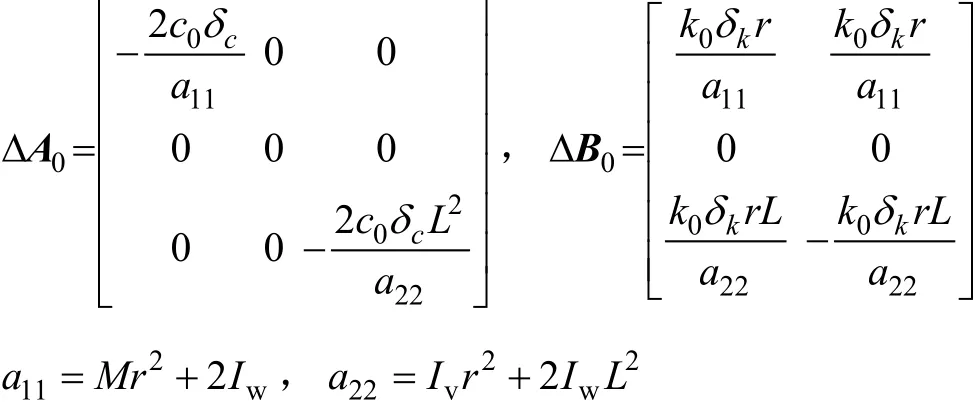
在系統(5)中,ΔA0和ΔB0為未知的不確定矩陣,同時滿足如下條件:

F1(t)和F2(t)代表變擾動矩陣,并假設是Lebesque可測的。
2 控制器設計
為了高效便捷地解決系統的動態追蹤問題,基于移動機器人的動力學參數不確定模型,設計如下的PI控制輸入,即

式中,K=[KP1KP2KP3KI]為待求解的控制器增益,νd和φd為相應的目標值。

式中,y( t)為測量輸出;矩陣C和D為適當維數常數矩陣,其他矩陣定義為
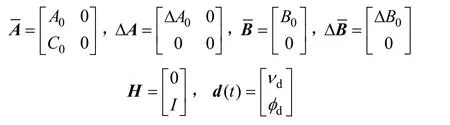
將u(t)=Kx(t)代入式(8),則相應的閉環機器人系統可以描述為

3 穩定性分析
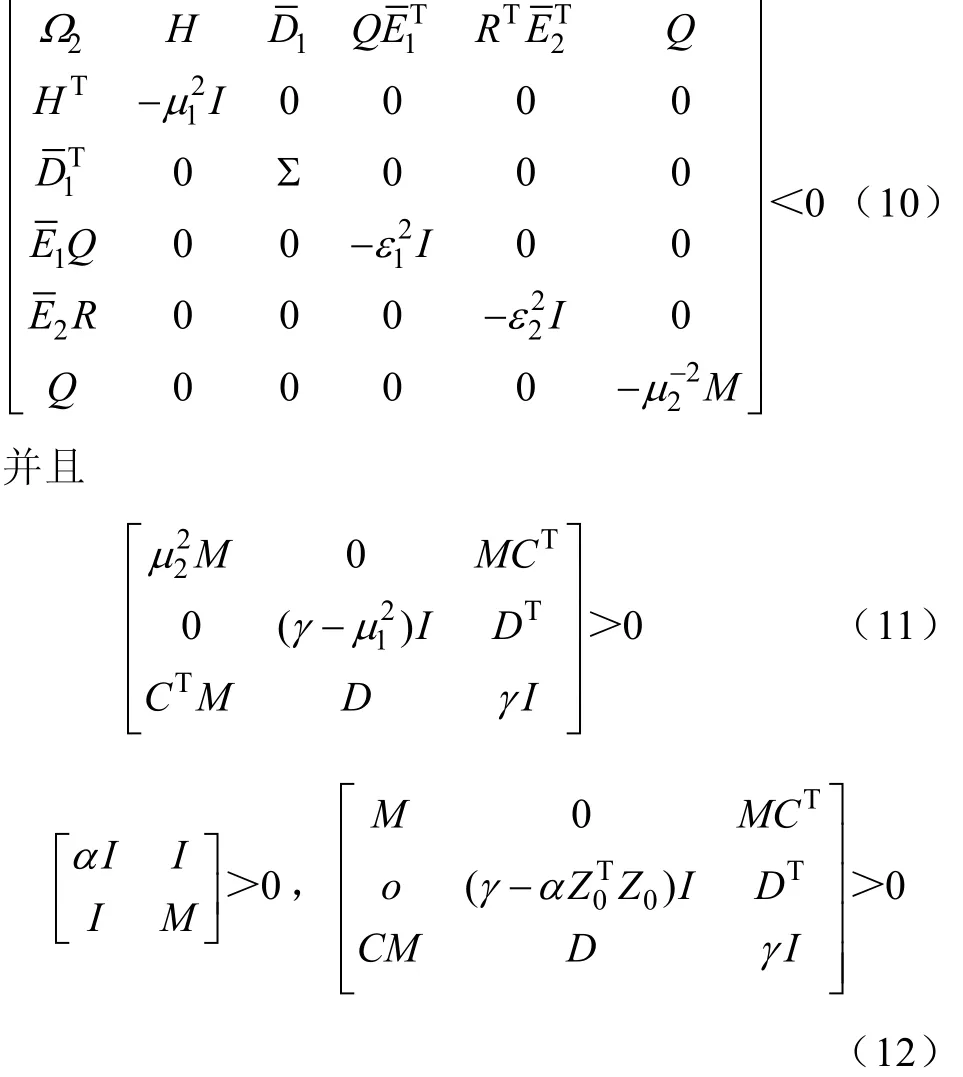
定理1:對于給定參數 μi(i= 1 ,2),εi(i= 1 ,2)和α>0 ,若存在適當維數的矩陣, Q= P-1>0、M=T-1>0,R和常數γ>0滿足下列不等式條件:
證明:選取Lyapunov函數 V ( z( t), t) = zT(t) P z( t ),易知 V ( z( t), t)≥0
進一步對其求導可得
在式(10)左、右乘以diag{P, I, I, I, I, I},diag{P, I, I, I, I, I},并結合Schur補引理,可以得到:(10)<0?
成立;式中 z0(t)為初始狀態向量,顯然存在 d(t)的情況下閉環系統式(9)穩定。
下面討論閉環系統的擾動衰減性能,式(19)可分為兩種情形:

根據schur補引理,并在式(11)左右兩側分別左乘diag{,,}I IT和右乘diag{,,}I IT可得

進一步可以得到

同理,在式(12)左右兩側分別左乘diag{,}I T 和右乘diag{,}I T可得

進一步可以得到

因此,閉環系統(9)滿足擾動衰減L1性能指標。
最后,證明在控制輸入 u(t)作用下系統的動態跟蹤性能。假設θ1(t)和θ2(t)為閉環系統式(9)不同的兩個動態軌跡。定義σ(t)=θ1(t)-θ2(t),則關于信號的方程表述如下:

類似前述,選取Lyapunov函數如下:

基于不等式(10),同理可證:

式中,λmin(t)為 T的最小特征值。可得σ =0是系統惟一的漸近平衡點,同時意味著閉環系統式(9)存在惟一平衡點 z*,進一步可以得到跟蹤誤差積分收斂。因此,保證了閉環系統的跟蹤性能。
4 仿真結果與分析
為了驗證算法的有效性,分析參數c、k的變化對移動機器人運動控制系統的影響,本節在Matlab/Simulink平臺上對所設計的魯棒PI控制算法進行了仿真實驗。實驗中,分別選擇正弦波形和圓形兩種軌跡作為參考路徑進行跟蹤,更具一般性。機器人系統的物理參數見表 1。假定摩擦系數 c和驅動增益k的不確定量為δc=+10%,δk=+10%。同時選定矩陣不等式中相關參數如下:

控制器增益通過直接求解線性矩陣不等式(10)至式(12)得到
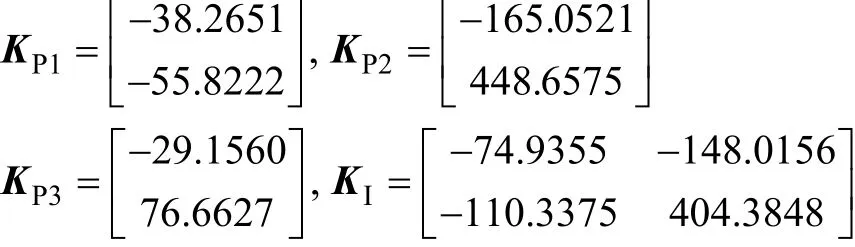
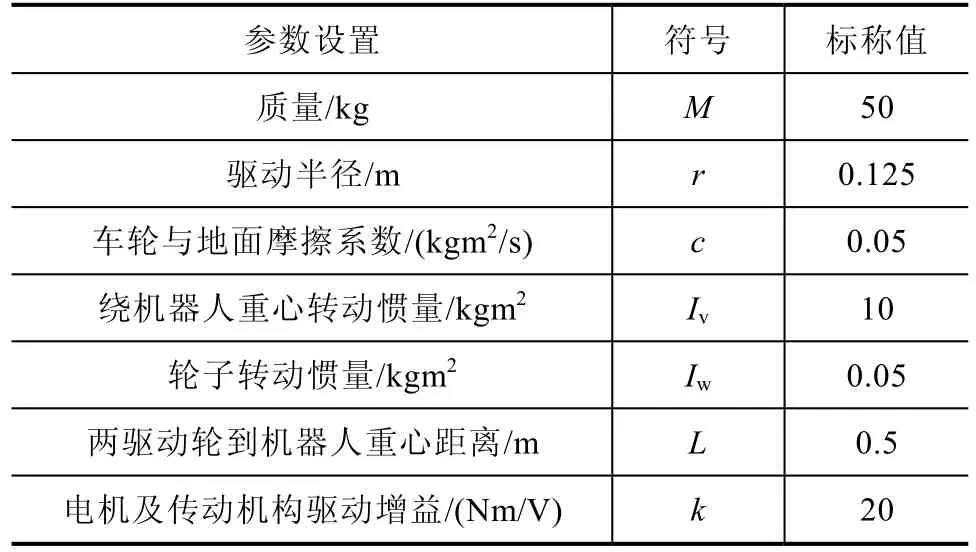
表1 機器人物理參數
4.1 正弦波形軌跡跟蹤
本節假設期望軌跡為 Y*=sin(0.2πX )的正弦波形,同時設定實際軌跡初始位置為(X ( 0),Y ( 0))=(0,0),初始方向角 φ (0) = 0.2rad,初始角速度θ(0)=0.2rad/s,初始線速度ν(0) = 0.2m/s。期望線速度ν*=1m/s,期望角速度 θ*=φ˙=0.2πrad/s。
由圖2至圖4可知,設計的PI控制器使得輪式機器人系統在參數不確定條件下仍能快速地跟蹤到速度和方向角的目標值,且跟蹤誤差收斂到零。由
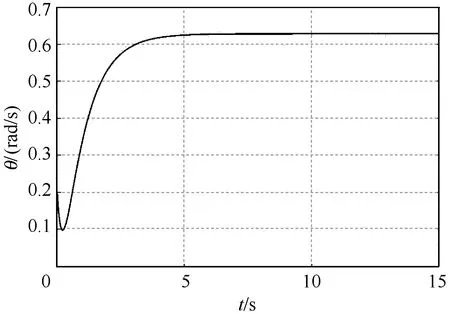
圖2 線速度跟蹤結果
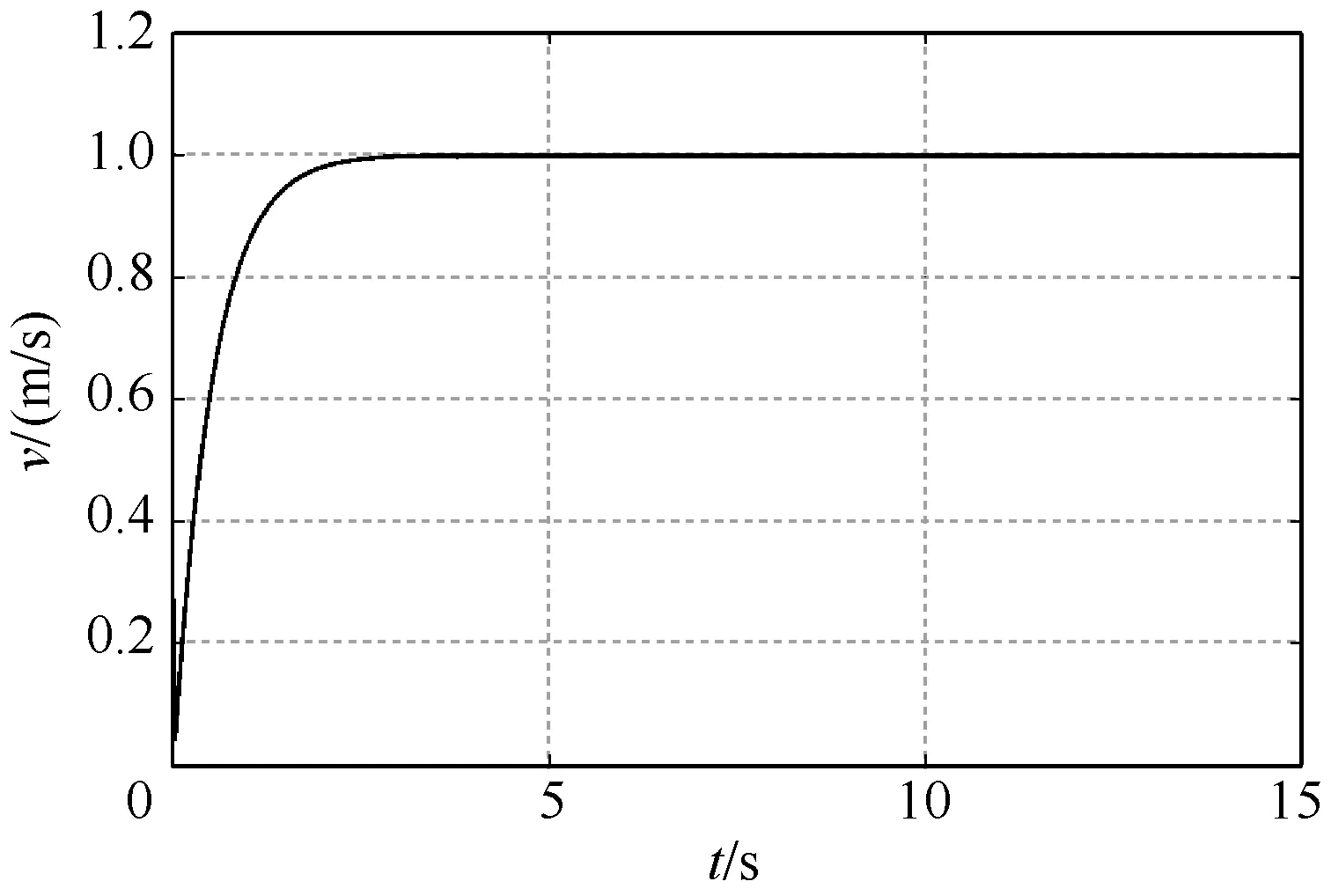
圖3 角速度跟蹤結果

圖4 跟蹤誤差
圖5可知,機器人系統在控制器作用下快速、準確地跟蹤到了設定的正弦波形軌跡,說明系統具備了良好的動態追蹤性能和穩定性。
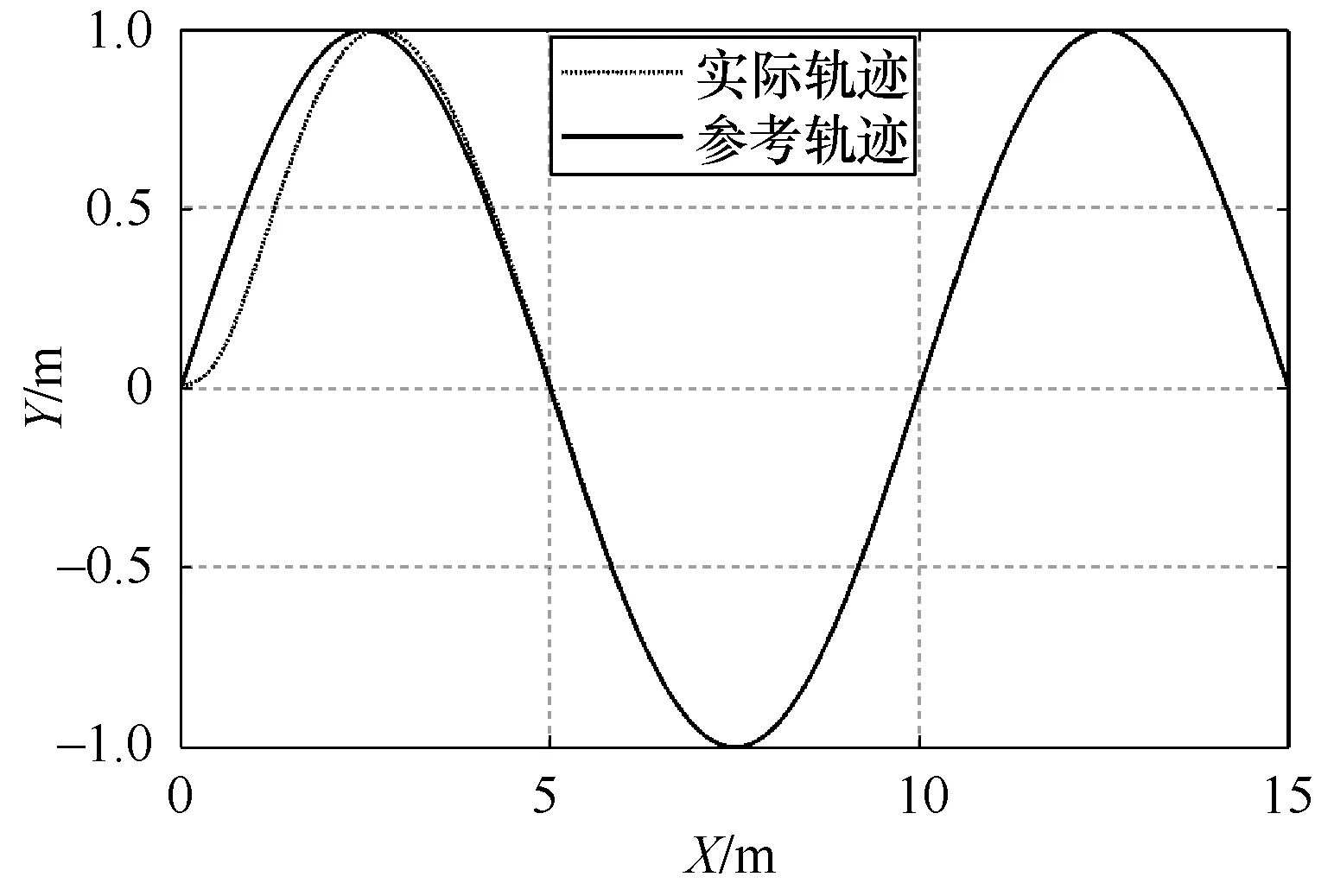
圖5 正弦波形軌跡跟蹤結果
4.2 圓形軌跡跟蹤
本節假設期望軌跡為
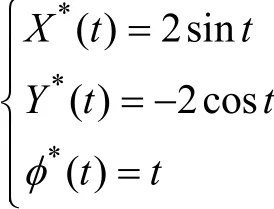
設定期望軌跡的初始位置為(X ( 0),Y ( 0))=(0.2,- 1 .4),而實際軌跡的初始位置為(X ( 0),Y ( 0))=(1,- 1 ),初始方向角 φ ( 0 ) =0 .2rad,初始角速度θ( 0 ) =0 .35rad/s,初始線速度 ν ( 0 ) =0 .1m/s 。期望線速度ν*= 2 m/s,期望角速度 θ*=φ˙=1rad/s .
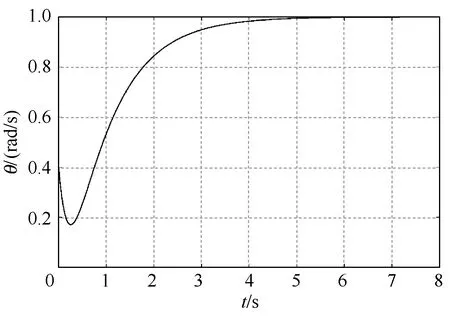
圖6 線速度跟蹤結果
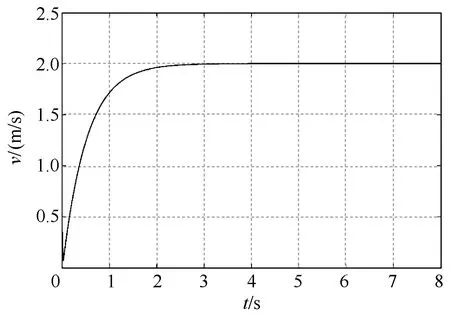
圖7 角速度跟蹤結果
由圖6和圖7可知,設計的控制器能夠使得參數不確定系統跟蹤到設定的線速度和角速度。圖 8說明了系統狀態誤差可以快速收斂到零。圖9進一步驗證了算法和控制器的有效性,盡管初始位置不一樣,但控制器使得系統在跟蹤圓形軌跡方面同樣具備了良好的穩定性和動態跟蹤性能。
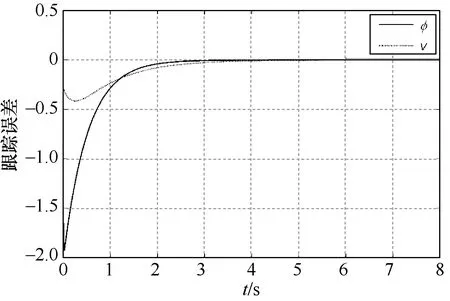
圖8 跟蹤誤差
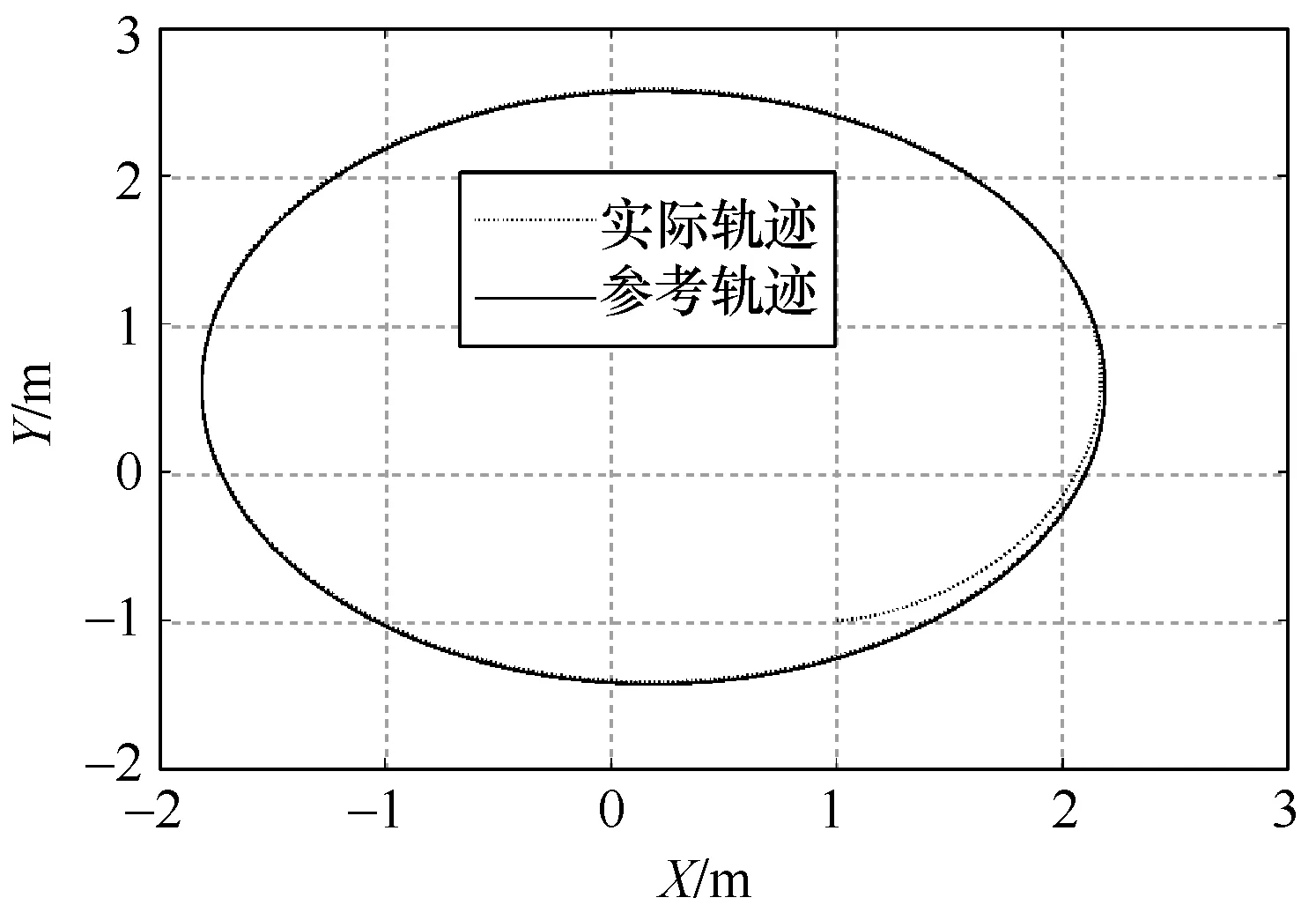
圖9 圓形軌跡跟蹤結果
5 結論
針對參數不確定的輪式移動機器人系統,本文設計了一種基于凸優化算法的魯棒PI控制器,通過調節反饋控制輸入使得移動機器人能夠漸近地跟蹤給定參考路徑,并結合L1性能指標有效地抵制參數攝動的影響,增強系統的魯棒性。同時,控制器也確保了輪式移動機器人的線速度、角速度和角度跟蹤誤差快速收斂到零。最后,基于Matlab平臺的仿真結果進一步驗證了設計算法的有效性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
四川輕化工大學學報(自然科學版)(2021年3期)2021-08-30 06:37:02
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
制造技術與機床(2017年3期)2017-06-23 08:11:21
智能系統學報(2015年4期)2015-12-27 09:38:35