基于無人機航測立體像對采集大比例尺地形圖的數學精度影響因素分析
2018-07-13 06:56:58胡震天周曉琴
城市勘測 2018年3期
胡震天,周曉琴
(南寧市勘察測繪地理信息院,廣西 南寧 530023)
1 引 言
由于地理數據變更頻繁,大量建設項目都需要采集最新的數據,而測繪工作技術性強,有嚴格的要求和生產規范,因此造成地理數據采集的周期長,成本高。拓展測繪手段,提高測繪工作效率,降低數據成本,成為亟待解決的問題。
目前,隨著航空技術的發展,無人機開始被廣泛使用,利用無人機獲取影像進行地理信息采集,將大幅度降低航拍作業的條件,主要表現為起飛降落靈活,方便快捷。另外,無人機飛行高度低,采用相對廉價的數碼相機也可以進行數據生產,因此能大幅度降低作業的成本,但由于無人機的飛行姿態不穩定,采用的相機畸變較大等問題,如何保證測繪產品的質量,需要進行研究和實踐。
利用無人機航測生產地形圖建議采用三維模型采集和立體像對采集相結合的方式,立體像對采集還是一個必要和有效的采集手段,本文主要研究基于無人機航測立體像對采集生產大比例尺地形圖,研究目的是通過分析影響因素,確定因素對地形圖成圖的數學精度的影響程度,根據研究結果,在生產過程中規范作業,進行質量控制,從而提高生產效率,提升經濟效益。
2 影響因素的選擇與測試思路
影響航測成圖精度的因素主要有:相機選擇、相機檢校與影像畸變改正、地面分辨率、重疊度、像控分布數量與精度、平差方式、采集方式等。無人機航測中相機選擇應主要考慮無人機的載荷和設計,目前主流為微單相機,必須使用定焦鏡頭。由于使用的相機一般為非量測相機,建議航拍前應進行相機檢校,空三前進行原始影像的畸變改正[1]。重疊度太大,相鄰像對的基高比小,高程精度低,像對數量多采集效率低;重疊度太小,相鄰模型間會存在漏洞。作者經過多個項目的生產實踐已確定航向重疊度和旁向重疊度的經驗值。因此,本文主要測試地面分辨率、像控密度、空三方式對成圖精度的影響。
測試地面分辨率對成圖精度影響的思路:使用不同分辨率的影像,添加相同的像控,用同樣的空三軟件來試驗地面分辨率的影響大小。
測試像控密度對成圖精度影響的思路:在試驗中,使用同一架次的影像,用同樣的空三軟件,通過添加不同密度的像控來測試像控密度這一因素的影響程度。
測試空三方式對成圖精度影響的思路:使用同一架次的影像,添加相同的像控,用不同的空三軟件分別做出空三來試驗此因素的影響方式和影響程度。
3 測試技術方案
3.1 測試區域選擇
此次測試選取了南寧市西鄉塘區約2 km2矩形區域作為試驗區。西南角坐標為北緯22.77°,東經108.15°,東北角坐標為北緯22.79°,東經108.13°,區域為丘陵地形,有建筑區、山丘、水域、農田等地類。
3.2 硬軟件選擇
此次進行航飛的飛機為北京精航科技有限公司生產的型號為YS-21(T-EZ-F)的電動固定翼無人機;相機型號為SONY ILCE5100,鏡頭焦距為 16 mm。
像控和檢查點測量使用儀器為海星達iRTK2經典版,利用南寧市勘察測繪地理信息院GPS連續運行參考站NNCORS系統進行測量,并測設了部分地面控制標志。
空三采用INPHO軟件,INPHO軟件有兩個不同的模塊,一是用于無人機數據處理的UAMaster(以下簡稱小模塊),二是用于處理傳統航攝數據的空三模塊ApplicationMaster(以下簡稱大模塊),立體測圖采用適普VirtuoZo數字攝影測量系統。
相機檢校和畸變改正采用自行研制的程序進行。
3.3 影響因素的設定
(1)地面分辨率的設定
因主要針對大比例尺地形圖測量,根據精度和效率的要求,選擇了優于 0.2 m的4個不同的地面分辨率來進行測試,分別為 0.05 m、 0.08 m、 0.12 m、 0.16 m。測試區域地面平均高程約為 80 m,航飛根據影像地面分辨率的不同,共分4個架次,航飛設計參數如表1所示:
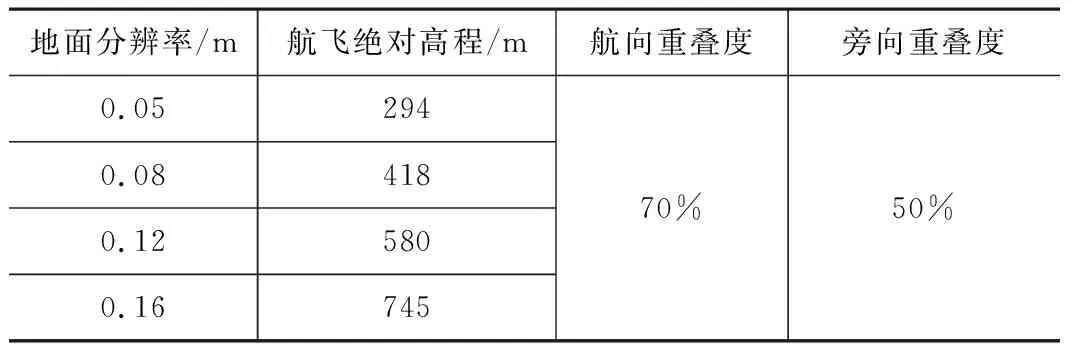
航飛設計參數 表1
(2)像控點密度的設定
像控點密度分5級,逐級加密,均勻分布,每級均保證區域角點有像控。像控點全部為平高點,共測量121處,246個點位,其中35處為人工布設的地面控制點,像控密度分5級,分別用不同顏色表示,分布如圖1所示。檢核點主要是高程檢核點,選擇在硬化路面且周圍高程變化不大的地方,共測量檢核點269個。
第1級為黃色,共6個點;
第2級在第1級的基礎上添加4個綠色的像控點,共10個;
第3級在第2級的基礎上添加4個淺藍色的像控點,共14個;
第4級在第3級的基礎上添加14個深藍色的像控點,共28個;
第5級在第4級的基礎上添加18個紅色的像控點,共46個。
(3)空三軟件的確定
目前可用來處理無人機數據的空三軟件較多,測試選用INPHO軟件,本文僅對INPHO的兩個處理模塊進行比較。
為方便比較,不同分辨率、不同像控個數、不同空三模塊分別進行空三解算,單獨命名,命名規則為項目代碼+分辨率+像控級數+空三模塊代碼,例如CSKC0501-B,CSKC為測試項目代碼,05表示地面分辨率為 0.05 m,01表示像控添加的為第一級像控,各級像控加入的點數和分布如圖1所示,B表示INPHO中大模塊做的空三,S則是小模塊做的空三。
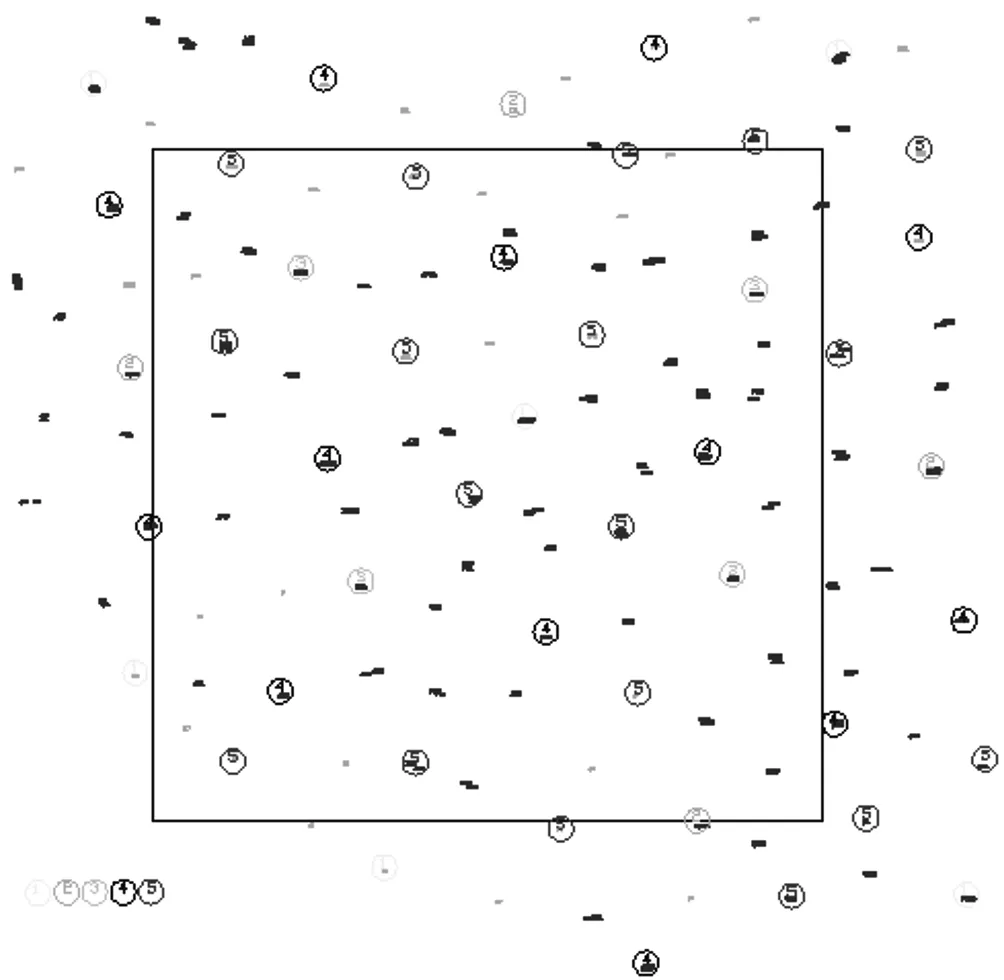
圖1 像控分布圖
3.4 測試技術流程
根據試驗區域的地形特征,布設地面控制點后進行航飛,航飛按不同地面分辨率進行幾個架次的航飛,航飛的同時進行像控點的測量。航飛前相機需要進行檢校,航飛得到的影像要進行畸變糾正。用得到的不同分辨率的糾正后的影像數據和像控數據進行空三解算,將不同分辨率的影像通過加不同密度的像控,分別用INPHO的大小模塊進行平差。在內業進行空三解算的過程中,外業可進行檢核數據的測量工作。將空三導入適普對立體像對進行檢核點采集。對照外業測量的高程點進行高程檢核采集,使用控制點進行平面檢核采集。將采集數據與外業實測數據進行對比統計分析。按GB/T 24356-2009規范中4.3.5檢測數據的處理中平面和高程中誤差計算公式計算中誤差。測試流程如圖2所示:
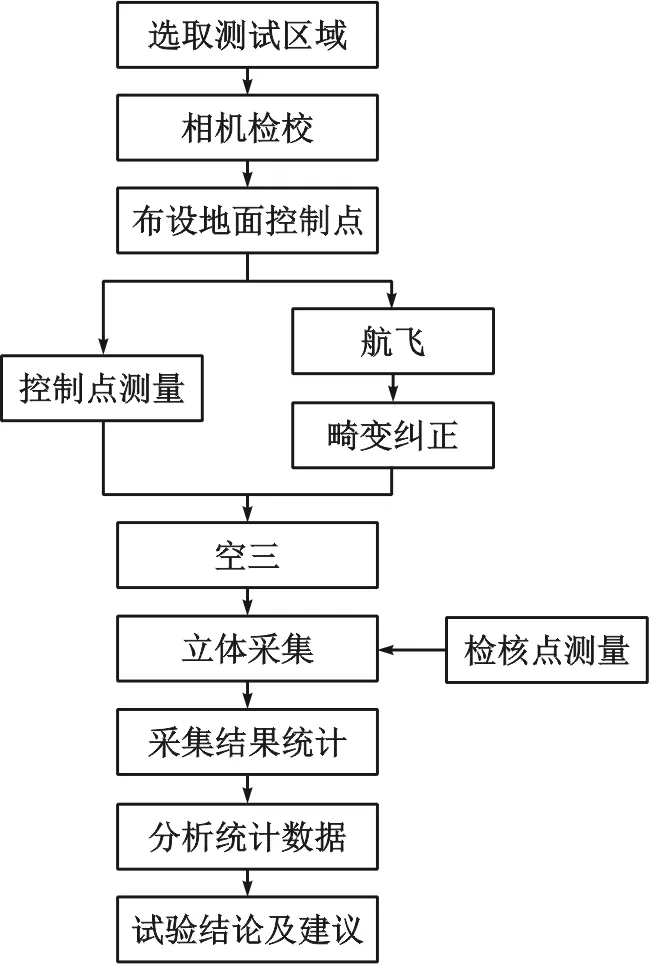
圖2 測試流程圖
4 測試結果分析
4.1 地面分辨率的不同對精度的影響
此次試驗共分4個不同的地面分辨率對同一區域進行航飛,分別為 0.05 m、0.08 m、0.12 m和 0.16 m。統計數據如表2所示:
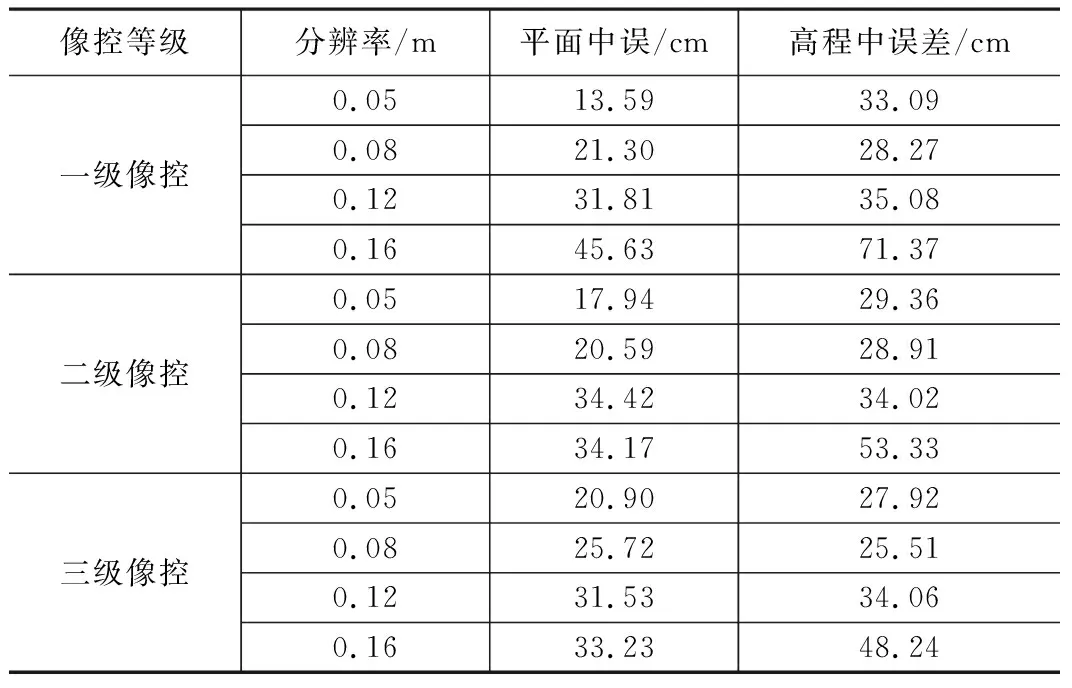
不同分辨率情況下的誤差統計 表2
以大模塊所做空三為研究對象,統計得出不同分辨率下,檢核點可達精度如表3所示:
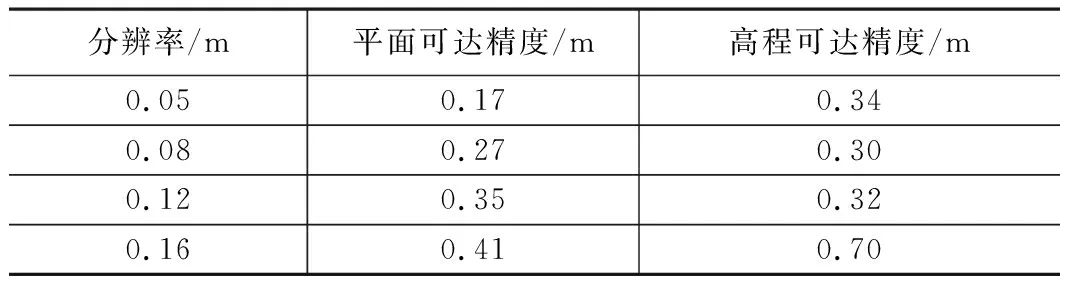
不同分辨率下的檢核點可達精度統計 表3
表3中只統計了1級、2級、3級像控下,不同地面分辨率的大小模塊平面中誤差和高程中誤差均值。
通過分析可以得出以下結論:
(1)平面精度與地面分辨率成正比,地面分辨率越高,成圖平面精度也越高;
(2)無人機航測立體采集測圖的平面精度約為3個像素;
(3)分辨率低于0.08 m時,高程精度與地面分辨率成正比,地面分辨率為 0.05 m與 0.08 m的高程精度相當,也就是說,地面分辨率不宜太高,地面分辨率越高,單個模型覆蓋面積越小,模型數量越多,模型接邊誤差會變大,從效率和精度考慮,建議利用無人機航拍立體模型采集生產大比例尺地形圖時,地面分辨率不高于 0.08 m。
4.2 像控密度的影響
采集得出誤差如表4所示:
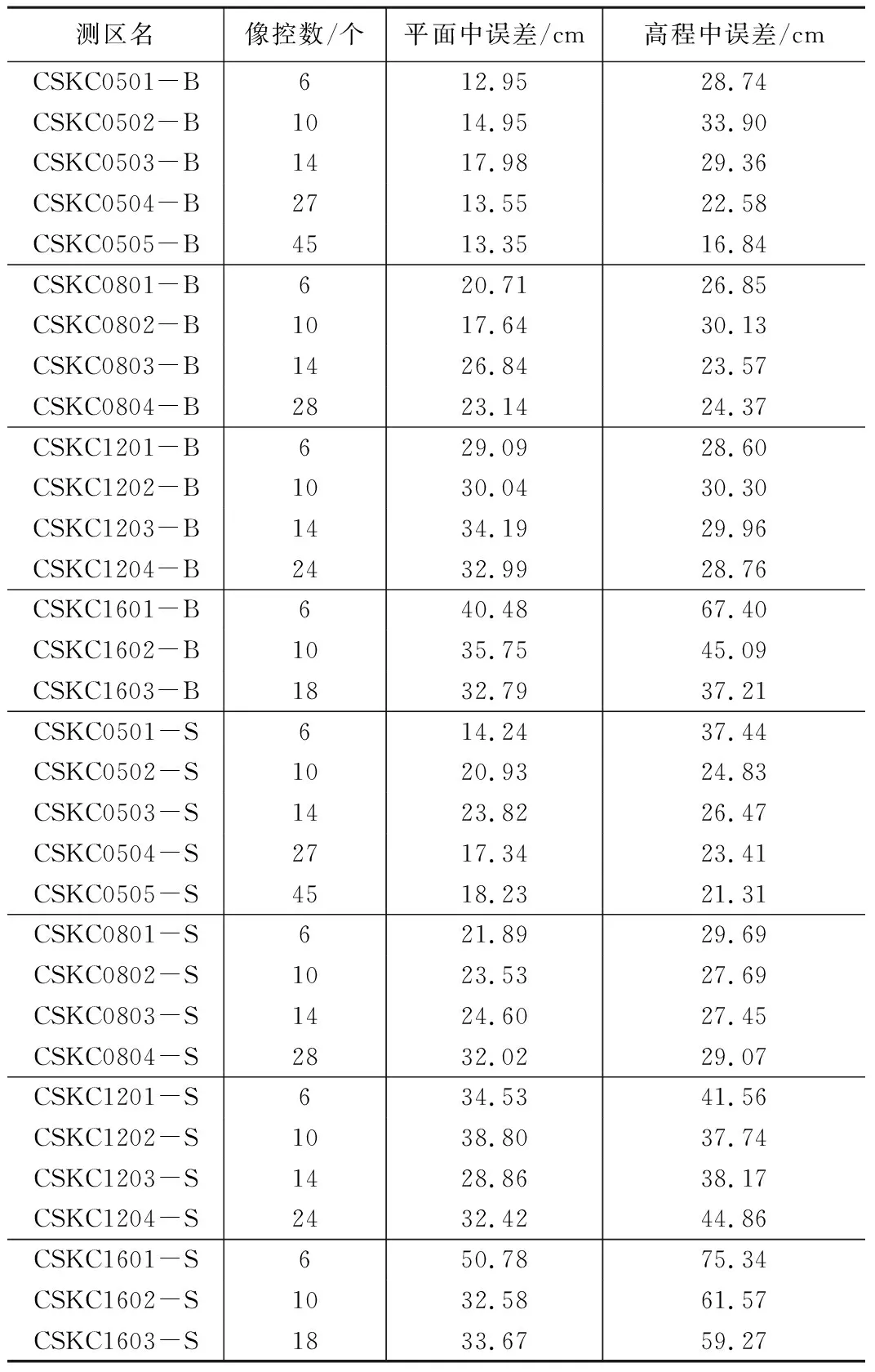
不同像控密度下的誤差統計 表4
由統計結果可得:
(1)像控點密度對平面精度影響不明顯;
(2)像控點越密,高程精度越好。
4.3 不同空三模塊的影響
此次試驗是用INPHO軟件的大小模塊分別對同一數據進行處理,得出不同的空三,分別采集得出的統計數據如下:
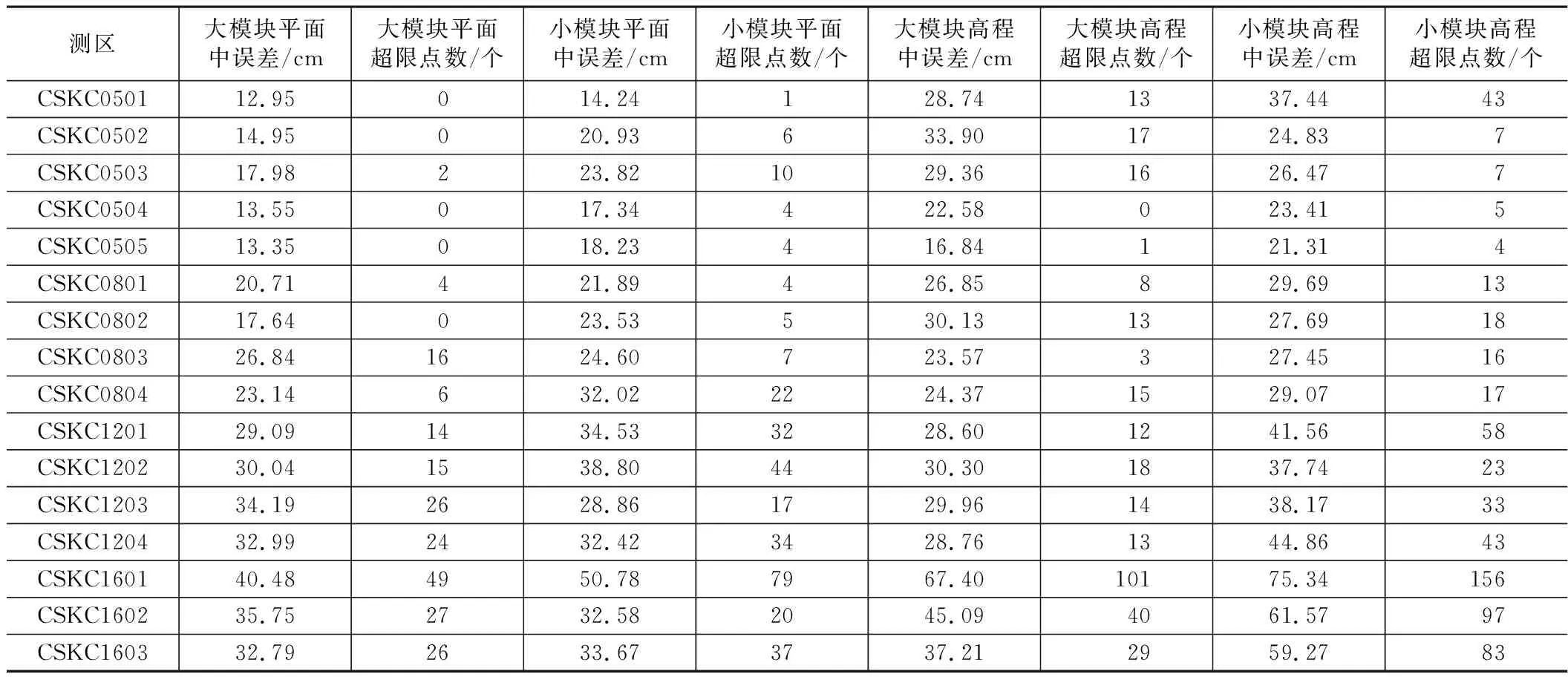
不同空三模塊的采集誤差統計 表5
由以上表5可知:
(1)大模塊比小模塊空三后成圖精度高,超限點數少。
(2)由于大模塊直接處理無人機航拍影像時提取連接點難以通過,建議先用小模塊空三,將小模塊空三后的外方位元素作為大模塊空三的初始值,再用大模塊空三處理。
5 結 論
此次試驗是針對無人機航拍利用立體像對采集方式生產數字線劃圖,通過試驗統計分析地面分辨率、像控密度、INPHO軟件的大小模塊所做空三等幾個因素對成圖精度的影響。此次測試采用實地采集數據,試驗數據真實可靠,基本實現測試的目的,達到了測試的效果。
通過試驗得出以下結論:
像控點對高程精度影響明顯,像控越密,高程精度越好,但對平面精度影響不明顯,測區像控分布均勻且角點處均有像控的情況下,平面精度并不隨像控密度的增大而增加;運用INPHO軟件的大小模塊所做出的空三,在原始影像、像控點一樣的情況下,大模塊所做空三的成圖精度要高于小模塊所做的空三;區域網布點時,兩條航帶之間必須有像控點,同條航線上建議每隔6張~8張影像布設一個像控點,像控點的密度約為每平方千米4個~8個點。
從精度和效率兩方面綜合,用無人機航測立體成圖生產大比例尺地形圖若用INPHO軟件做空三,建議使用大模塊來平差,且成圖比例尺與各技術參數的關系如表6所示。
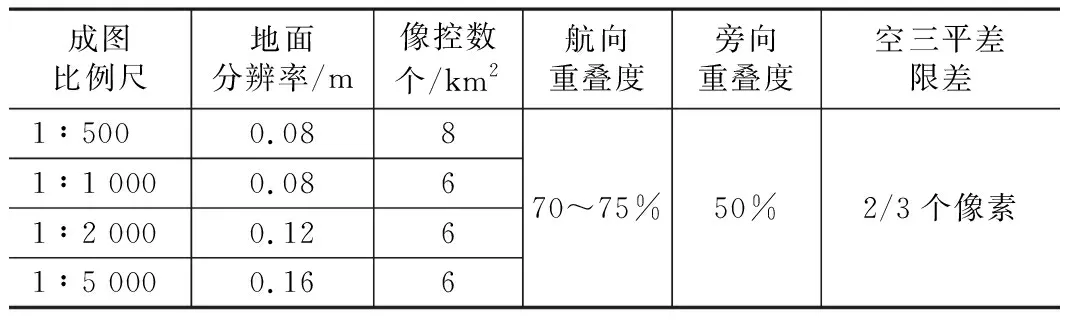
無人機航測立體成圖生產大比例尺地形圖的技術參數 表6
以上的研究成果對用無人機航空攝影方式生產數字線劃圖的生產流程,技術設計,質量控制等方面提供了依據,具有一定的生產應用和推廣價值。
此次測試雖然基本達到了測試的預期效果,但由于相關因素太多,而在做單一因素試驗時,其他因素也會有影響,如天氣的影響、個人采集的誤差等。試驗區域的地形較為平坦,只能代表一種地形,具有一定的局限性,對于丘陵地形、山地地形不具有說明性;試驗所用的空三軟件為INPHO,采集所用軟件為適普IGS,有一定的局限性。若要進一步研究,可從地形、無人機的機型、相機鏡頭、空三及采集軟件等因素做進一步試驗。