運(yùn)動(dòng)手環(huán)中的姿態(tài)檢測(cè)方法研究
2018-07-12 09:58:40唐芳月劉師橋劉語涵王豐林
電腦與電信 2018年4期
宋 藝 張 波 唐芳月 劉師橋 劉語涵 王豐林
(天津師范大學(xué)計(jì)算機(jī)與信息工程學(xué)院,天津 300387)
1 引言
在信息技術(shù)高速發(fā)展的時(shí)代背景下,由于可穿戴式檢測(cè)裝置具有體積小、方便攜帶、低耗能等特點(diǎn)[9],因此越來越受人們的喜愛。
雖然可穿戴設(shè)備的外觀在人們的選擇考慮因素方面占有一定比例,但在更大程度上是對(duì)設(shè)備檢測(cè)準(zhǔn)確性的選擇。因此從算法角度分析,如何提高對(duì)人體運(yùn)動(dòng)姿態(tài)檢測(cè)的準(zhǔn)確性就顯得尤其重要。
如今市面上的手環(huán)大多數(shù)是無法精確檢測(cè)人的運(yùn)動(dòng)姿態(tài),只能是通過“三軸加速度傳感器”來采集運(yùn)動(dòng)數(shù)據(jù),簡(jiǎn)單地記錄人是靜止的還是運(yùn)動(dòng)的。然后再通過算法對(duì)采集的數(shù)據(jù)進(jìn)行處理分析,對(duì)比事先建立好的模型來判斷佩戴者的運(yùn)動(dòng)狀態(tài)。因此算法的好壞直接影響到檢測(cè)佩戴者狀態(tài)的準(zhǔn)確性,所以在手環(huán)設(shè)計(jì)時(shí)選擇一個(gè)較為恰當(dāng)?shù)乃惴ㄖ陵P(guān)重要。
2 余弦測(cè)度
2.1 硬件選擇
該方法在硬件方面采用的是三軸加速度傳感器,該傳感器可以獲得三維立體空間的三個(gè)分量上的加速度信號(hào),且該傳感器功耗低、體積小,對(duì)大多數(shù)手環(huán)均適用。
2.2 方法實(shí)現(xiàn)
假設(shè)空間中有兩個(gè)向量 a(x11,x12,...,x1n)和 b(x21,x22,...,x2n),夾角余弦的具體計(jì)算公式如(1)所示。

余弦測(cè)度主要是用于判斷兩種姿態(tài)的相似度,通過計(jì)算空間中兩個(gè)向量的夾角余弦來判斷兩個(gè)姿態(tài)的相似程度,當(dāng)計(jì)算的數(shù)值小于某一臨界值時(shí),可以認(rèn)為是同一種姿態(tài)[1]。同時(shí),可以通過滿足閾值時(shí)間點(diǎn)前后加速度矢量的過程來判定是否跌倒[7]。
通過這種方法,可以對(duì)確定臨界值的大小進(jìn)而對(duì)姿態(tài)判斷的精確度進(jìn)行提高,但臨界值不能定得過低,這樣就會(huì)導(dǎo)致很少甚至沒有同一種相同的姿態(tài)產(chǎn)生,導(dǎo)致了大量的冗余計(jì)算。
3 四元數(shù)算法
3.1 硬件選擇
該算法所選用的姿態(tài)模塊硬件是三軸加速度傳感器和三軸陀螺儀。
3.2 方法實(shí)現(xiàn)
四元數(shù)算法將陀螺儀獲得的角度信息融合到加速度傳感器中,進(jìn)而得到精確的姿態(tài)判斷。
四元數(shù) q可以用q0,q1,q2,q3來表示成一個(gè)復(fù)數(shù),其中q0為四元數(shù)的實(shí)部,q1,q2,q3為四元數(shù)的虛部,四元數(shù)可表示為公式(2),其中四元數(shù)q求模要滿足公式(3)。


四元數(shù)微分方程為公式(4),其中ω為[0 ω1ω2ω3],而ω1,ω2,ω3為陀螺儀輸出的角速度。通過計(jì)算四元數(shù)微分方程,可以對(duì)四元數(shù)進(jìn)行更新,使姿態(tài)判斷的準(zhǔn)確性提高[2]。而針對(duì)于旋轉(zhuǎn)運(yùn)動(dòng)的旋轉(zhuǎn)四元數(shù)算法僅適用于低速旋轉(zhuǎn)狀態(tài)的判定[10]。
在運(yùn)動(dòng)加速度、磁場(chǎng)干擾等的影響下,短時(shí)間內(nèi)精確度較低,這時(shí)可使用互補(bǔ)濾波方法對(duì)傳感器信息進(jìn)行融合[5]。即與下述的WHPDS相結(jié)合而成的姿態(tài)檢測(cè)算法。
4 自適應(yīng)波峰檢測(cè)
4.1 硬件選擇
慣性 EMES(Micro Electro Mechanical systems,即微電子機(jī)械系統(tǒng))傳感器具有高質(zhì)量、高靈敏度、重量輕、價(jià)格低廉等特點(diǎn)[2],因此被廣泛運(yùn)用到重力加速度的測(cè)量方面,而該算法針對(duì)于MEMS傳感器姿態(tài)檢測(cè)和運(yùn)動(dòng)狀態(tài)的變化有較強(qiáng)的適應(yīng)性。
4.2 方法實(shí)現(xiàn)
該方法是一種將波峰檢測(cè)計(jì)步算法和自相關(guān)分析計(jì)步算法相結(jié)合的判斷姿態(tài)的方法,通過單軸加速度和固定閾值對(duì)不同的運(yùn)動(dòng)狀態(tài)進(jìn)行判斷。
該算法利用波峰檢測(cè)計(jì)步算法中不同姿態(tài)的幅值和步頻不同,再利用相應(yīng)的閾值區(qū)間判斷運(yùn)動(dòng)姿態(tài),圖1為自適應(yīng)波峰檢測(cè)算法流程圖[3]。
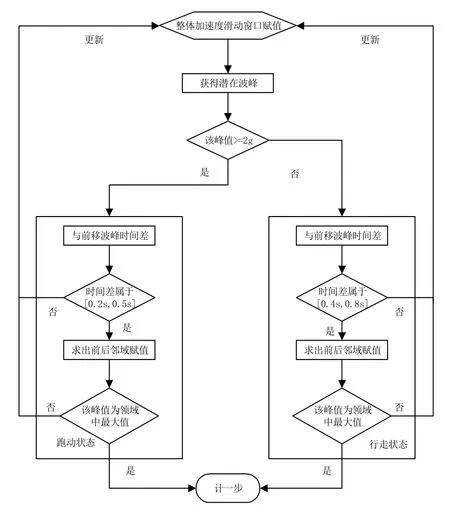
圖1 自適應(yīng)波峰檢測(cè)算法流程圖
5 人體姿態(tài)檢測(cè)系統(tǒng)(WHPDS)
5.1 硬件選擇
該檢測(cè)系統(tǒng)所選用的硬件部分是六軸慣性傳感器,其集成一個(gè)三軸加速度傳感器和一個(gè)三軸陀螺儀。加速度計(jì)模塊可以識(shí)別靜止或平緩運(yùn)動(dòng)狀態(tài)下的角度信息,陀螺儀模塊對(duì)各種運(yùn)動(dòng)狀態(tài)下角度信息的變化均比較敏感[4]。
5.2 方法實(shí)現(xiàn)
WHPDS通過加速度計(jì)和陀螺儀獲得相應(yīng)的姿態(tài)數(shù)據(jù),利用互補(bǔ)濾波原理在短時(shí)間內(nèi)對(duì)陀螺儀的角度進(jìn)行最優(yōu)化,然后得出佩戴者相應(yīng)的姿態(tài)[6]。由于在短時(shí)間內(nèi)陀螺儀所測(cè)量出的數(shù)據(jù)比較準(zhǔn)確,而在長(zhǎng)時(shí)間的檢測(cè)中加速度計(jì)所測(cè)量的數(shù)據(jù)比較準(zhǔn)確,通過互補(bǔ)濾波使信號(hào)更加精確,進(jìn)而使姿態(tài)判斷更加精確。
6 算法對(duì)比
以上的四種計(jì)算佩戴者姿態(tài)的方法均是對(duì)檢測(cè)數(shù)據(jù)增加精確度的姿態(tài)判斷方法,可以從上面的分析中看出,在硬件方面都用到了加速度傳感器,除了余弦測(cè)度以外都使用到了陀螺儀。可見大部分主流手環(huán)還是以加速度傳感器和陀螺儀為基本元件進(jìn)行姿態(tài)檢測(cè)的。
余弦測(cè)度只用了一個(gè)三軸加速度傳感器進(jìn)行姿態(tài)判斷,利用數(shù)學(xué)上簡(jiǎn)單的余弦定理進(jìn)行姿態(tài)種類是否相同的判斷。該方法計(jì)算簡(jiǎn)便且硬件方面消耗較小,但在臨界值確定時(shí)要把握好度,同時(shí),該方法需要前期大量的數(shù)據(jù)支持。
四元數(shù)算法是將加速度傳感器與陀螺儀進(jìn)行聯(lián)系,通過對(duì)比重力向量的數(shù)值得出相應(yīng)的姿態(tài)判斷。四元數(shù)算法雖然在硬件上增加了陀螺儀,但通過兩個(gè)部件得出的姿態(tài)判斷將更加準(zhǔn)確,四元數(shù)算法是一種比較綜合的姿態(tài)檢測(cè)方法。
自適應(yīng)波峰檢測(cè)是由波峰檢測(cè)計(jì)步算法和自相關(guān)分析計(jì)步算法相結(jié)合的姿態(tài)判斷算法,它和其他三種算法都不太相同,通過不同運(yùn)動(dòng)狀態(tài)的幅值和步頻不同進(jìn)而判斷出不同的運(yùn)動(dòng)姿態(tài)。自適應(yīng)波峰檢測(cè)的優(yōu)點(diǎn)在于計(jì)算量小,可以方便地進(jìn)行實(shí)時(shí)檢測(cè)[10],適用于行走或跑步之類的計(jì)步的姿態(tài)判斷,但并不適用于具體姿態(tài)的判斷。
WHPDS也是運(yùn)用加速度傳感器和陀螺儀進(jìn)行姿態(tài)檢測(cè)的,與四元數(shù)算法不同的是它利用互補(bǔ)濾波進(jìn)行姿態(tài)判斷,得出的判斷較為精確,但它需要多個(gè)傳感器在人體不同位置記錄數(shù)據(jù),對(duì)那些需要精確記錄行動(dòng)狀態(tài)的病人是有很大幫助的。
7 結(jié)論
通過上述對(duì)四種姿態(tài)判斷方法的分析與比較,可以看出不同的方法各有特點(diǎn),如何選用不同的方法需要根據(jù)情況而定。
設(shè)計(jì)兒童手環(huán)并不需要過于精確的運(yùn)動(dòng)姿態(tài)判斷,而且根據(jù)兒童相對(duì)比較多動(dòng),因此不適用于在身體不同位置安置多個(gè)傳感器,所以在設(shè)計(jì)兒童手環(huán)時(shí)WHPDS可以略去,不予采用。
因此,在設(shè)計(jì)兒童手環(huán)時(shí)應(yīng)采用以四元數(shù)算法為主體,余弦測(cè)度和自適應(yīng)波峰檢測(cè)為輔的綜合算法對(duì)姿態(tài)進(jìn)行判斷,硬件方面采用三軸加速器和陀螺儀相結(jié)合的傳感器。自適應(yīng)波峰檢測(cè)先對(duì)運(yùn)動(dòng)姿態(tài)進(jìn)行較快的判斷,主要用于實(shí)時(shí)數(shù)據(jù)的更新,然后使用四元數(shù)算法對(duì)自適應(yīng)波峰檢測(cè)出的結(jié)果進(jìn)行檢測(cè),得出精確的姿態(tài)判斷。
[1]王壯.可穿戴設(shè)備中的人體姿態(tài)識(shí)別方法[D].南京:南京郵電大學(xué),2016.
[2]李炳炳.基于M EM S慣性傳感器的人體姿態(tài)檢測(cè)系統(tǒng)的研究[D].南京:南京理工大學(xué),2017.
[3]陳國(guó)良,李飛,張言哲.一種基于自適應(yīng)波峰檢測(cè)的M EM S計(jì)步算法[J].中國(guó)慣性技術(shù)學(xué)報(bào),2015,23(03):315-321.
[4]胡小華,李向攀,祁洋陽,等.可穿戴式人體姿態(tài)檢測(cè)系統(tǒng)設(shè)計(jì)[J].電子技術(shù)應(yīng)用,2017,43(09):13-16.
[5]李景輝,楊立才.基于多傳感器信息融合的人體姿態(tài)解算算法[J].山東大學(xué)學(xué)報(bào)(工學(xué)版),2013,43(05):49-54.
[6]郭曉鴻,楊忠,陳喆,等.EK F和互補(bǔ)濾波器在飛行姿態(tài)確定中的應(yīng)用[J].傳感器與微系統(tǒng),2011,30(11):149-152.
[7]孫新香.基于三軸加速度傳感器的跌倒檢測(cè)技術(shù)的研究與應(yīng)用[D].上海:上海交通大學(xué),2008.
[8]陳國(guó)良,張言哲,楊洲.一種基于手機(jī)傳感器自相關(guān)分析的計(jì)步器實(shí)現(xiàn)方法[J].中國(guó)慣性技術(shù)學(xué)報(bào),2014,22(06):794-798.
[9]陳功.基于三軸加速度傳感器的跌倒檢測(cè)技術(shù)的研究與應(yīng)用[D].南京:南京郵電大學(xué),2013.
[10]王彤,馬建倉,秦濤,等.基于旋轉(zhuǎn)四元數(shù)的姿態(tài)解算算法[J].彈箭與制導(dǎo)學(xué)報(bào),2014,34(03):15-16.
猜你喜歡
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
兒童故事畫報(bào)(2019年5期)2019-05-26 14:26:14
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年7期)2015-08-11 15:03:12