蟹、蝦養殖池塘移動投飼裝置的設計與試驗
2018-07-11 10:10:24陳曉龍田昌鳳
漁業現代化 2018年3期
洪 揚,陳曉龍,田昌鳳,朱 燁,車 軒,陳 超,陳 翔,江 濤
(農業部漁業裝備與工程技術重點實驗室,中國水產科學研究院漁業機械儀器研究所,上海 200092)
隨著集約化水產養殖技術的不斷發展和完善[1-3],養殖機械也得到了迅速發展。投飼機因其具有節省人工和飼料,經濟效益顯著等優點,成為現代池塘水產養殖機械中一個重要的組成部分[4-9]。國內外對蟹塘、蝦塘投飼裝置,尤其是自動化移動投飼裝置的研究報道較少。近幾年雖然在池塘行走定位和測距方面有了一些研究成果,如采用全球定位系統(GPS)的行走機構定位以及離岸測距方法等[10-12],但其主要應用于魚塘或其他試驗研究,對于常見的大中型蟹塘、蝦塘養殖,因其定位方法成本高、操作復雜,并不適用。目前,大部分蟹、蝦養殖企業仍采用投飼機定點投喂或人工投喂的方式[13-14],存在投飼距離短、范圍小、投飼不均勻、飼料利用率低,以及人工成本高等問題。
針對蟹、蝦養殖的特點,設計了一套投飼裝置,以牽引繩為行走路線,裝有投飼裝置的投飼船通過牽引繩以一定的速度實現自動行走,同時采用拋撒裝置在池塘中均勻拋撒飼料[15],具有操作簡單、投飼均勻等特點,可實現飼料全池塘、大范圍投飼的功能要求。
1 工作原理與結構設計
1.1 工作原理
投飼裝置(圖1)主要由行走機構、儲料箱、上料裝置、拋撒裝置等組成。工作時,將飼料裝入儲料箱,啟動行走機構,投飼船按照既定路線[16]以一定的速度航行,電動機帶動上料裝置將飼料螺旋提升到撒料盤上,旋轉的撒料盤利用自身轉速所產生的離心力[17]將飼料以切線方向撒向池塘。該裝置可通過調節送料蛟龍轉速控制投料量,從而滿足不同大小池塘的要求;也可通過控制投飼船的航行速度來綜合調節投飼速度、投飼量大小,進而達到精準投飼要求。飼料采用螺旋上升的傳送方式,可以減少飼料破損。
1.2 行走機構
行走機構由浮船和導向裝置組成。浮船由兩只小浮船通過不銹鋼連接架并聯固定,船體可承載100 kg質量,且具有較好的穩定性。導向裝置為固定在池塘中軸線上的牽引繩,牽引繩通過浮船上的導向架來引導航向,通過電氣系統控制其速度,從而達到調節投飼量和移動投飼的目的。該裝置可滿足寬30 m、長100 m大中型池糖的投飼需要。
1.3 上料裝置
上料裝置的核心是上料絞龍結構(圖2)。為了保證送料效果,減少飼料破損,絞龍結構設計時要保證飼料在豎直傳送時與絞龍套筒之間的間隙,同時要保證飼料不能從間隙中掉落,因此對絞龍套筒內壁與絞龍外圓的間距需要合理安排。該結構中采用迷宮式密封方法[18],可避免被壓碎的飼料堵住密封口,又能起到密封作用。另外,此結構可以保證飼料不斷地被輸送到撒料平臺上,使傳輸更加穩定[19-20]。當送料絞龍螺旋轉動時,絞龍內的飼料受到螺旋向上力的作用,飼料呈螺旋式向上傳輸。飼料運動情況如圖3所示。
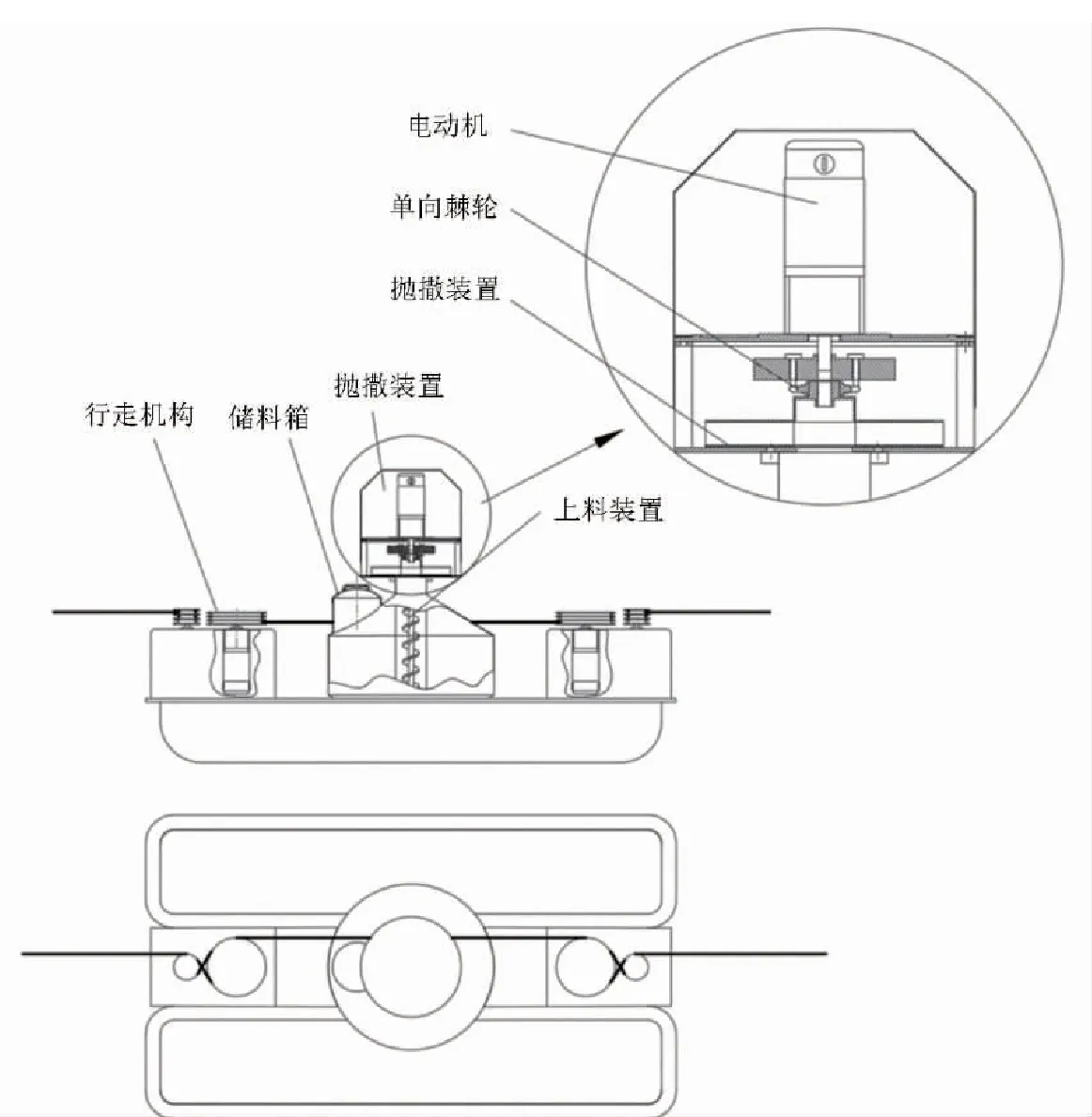
圖1 移動式蝦塘、蟹塘投飼裝置結構示意圖
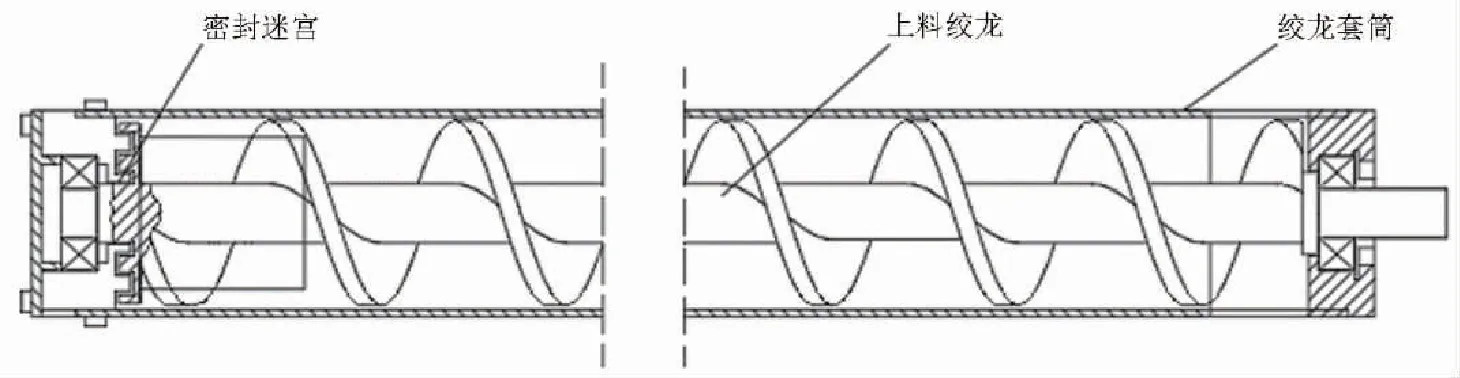
圖2 上料絞龍結構
當絞龍繞中心軸旋轉時,在半徑為r的螺旋片上任一點x處有一飼料,該飼料一方面與葉片之間有相對滑動,另一方面在螺旋葉片推力作用下有軸向運動。其運動速度可以根據速度矢量三角形求解得出。根據飼料顆粒運動速度圖的分析,飼料的移動速度為:
v1=vfcos(a+φ)
(1)
其中:
(2)

(3)
因此,
(4)
式中:v1—軸向運動速度,m/s;vf—飼料實際運動速度,m/s;φ—飼料與金屬摩擦角,°;v0—x點的線速度,m/s;vn—不計摩擦時飼料的絕對速度,m/s;α—螺旋葉片升角,葉片半徑ρ的函數,而同一橫斷面上葉片各點的ρ值不同,故a不同,v1亦不同;S—螺旋葉片的螺距,m,對于滿面葉片絞龍,本設計選用0.04;n—絞龍轉速,r/min。
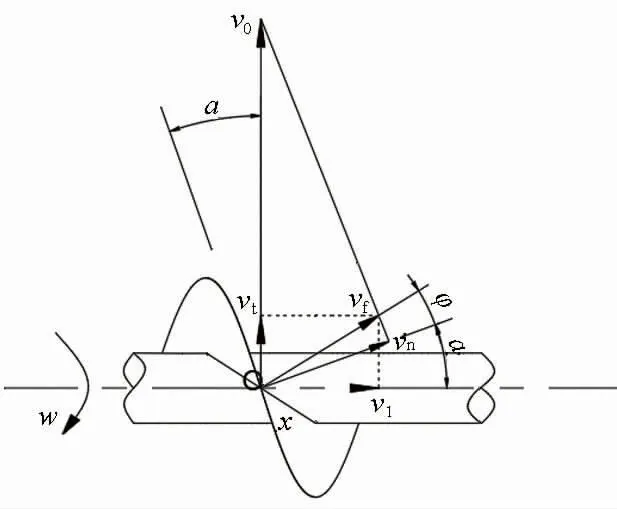
圖3 飼料運動示意圖
1.4 拋撒裝置
拋撒裝置由步進電機、棘輪、撒料盤組成,上料絞龍到達頂端時,通過在套筒上開出3個面積相等的孔,飼料通過開孔進入撒料盤(圖4)。
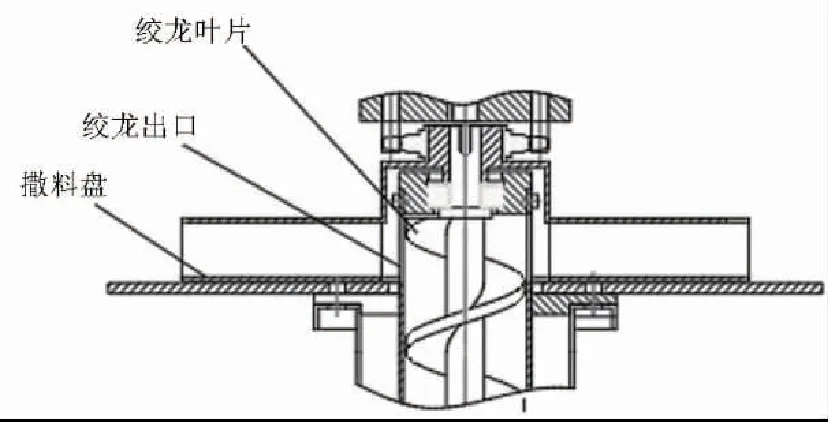
圖4 絞龍出口及撒料盤示意圖
棘輪控制撒料盤的單向旋轉,防止絞龍因反轉而導致撒料裝置不能正常工作。步進電機控制撒料盤的轉速,進而控制飼料拋撒直徑和拋撒量,根據實際養殖需要調整投喂量。通過理論計算和多次試驗,選用轉速300 r/min、功率100 W的電機。撒料盤承接送料絞龍輸送的飼料,通過一定的轉速將飼料均勻地拋撒在水面。
1.4.1撒料盤設計分析
為了更好地讓飼料從撒料盤上拋撒出去,撒料盤設置了8個擋板。為便于分析,在幾種不同速率下,對投飼撒料裝置模型進行如下簡化處理:飼料顆粒都是球形;飼料顆粒落到撒料盤上沒有跳動和滾動,只有滑動;飼料顆粒落到撒料盤上只有單層,不會相互疊加[21]。根據實際需要,飼料顆粒直徑分別為1 mm、2.5 mm和3 mm。對飼料顆粒在撒料盤上的運動進行分析,當飼料顆粒從輸送絞龍出來落入撒料盤時,初始速度可以假定為零,當撒料盤相對飼料顆粒轉動時,飼料顆粒便會很快接觸到撒料盤隔板,因此根據慣性理論,飼料顆粒受到慣性力、離心力、摩擦力和擋板的支撐力,飼料顆粒受力不能達到平衡。飼料顆粒在落到撒料盤上時的受力可以分解為徑向和切向。為簡化分析,主要考慮飼料顆粒在撒料盤受到的滑動摩擦力。

(5)
(6)
(7)
由于圓盤被分成8等分,飼料顆粒運動受到中間隔板對顆粒的影響,運動顆粒分為不接觸隔板而做離心運動自由撒落的顆粒和在撒料盤上接觸到隔板后沿著隔板撒落的顆粒,在慣性作用下,大部分顆粒沿著擋板向外做加速運動,則顆粒離開撒料盤后的運動方程為:
(8)
S=vt
(9)
式中:h—撒料盤距離承料面的豎直高度,m;g—地球重力加速度,m/s2;t—飼料顆粒作平拋運動的時間,s。S—飼料顆粒在離開撒料盤后運動的水平距離,m;v—飼料顆粒飼料離開撒料盤時的初始速度,m/s。
式(8)、(9)表明,從相同的高度h落下,飼料顆粒離開撒料盤所達到的最遠距離S由其離開撒料盤的初始速度決定,而由式(5)~(7)可知,飼料顆粒離開撤料盤的初始速度受到離心力、慣性力和摩擦力的影響。因此,可以認為,顆粒離開撒料盤所達到的最遠距離與撒料盤轉速、直徑等有關。因此,在撒料盤直徑一定的情況下,通過調節撒料盤轉速,可使飼料顆粒拋撒出去時所獲得的初始速度不同,進而可以調節拋撒半徑。根據實際生產需要,可以設計直徑不同的撒料盤,配合電機轉速,來實現更大投飼半徑范圍的調節。
2 投飼裝置主要設計參數確定
2.1 送料絞龍直徑
按照最大投飼量的設計要求,料倉滿載時體積為0.08 m3,需要20 min內完成一次投飼。根據對絞龍軸的撓度和剛度計算,設計絞龍軸半徑為10 mm。實際工作中通常不考慮物料軸向阻滯的影響,因而飼料的流通量可用下面簡化公式計算:
(10)
V=Qrnt
(11)
聯立上述2個方程得出:
(12)
式中:v—物料軸向速度,m/r,本設計選用0.04 m/r;n—絞龍轉速,r/min,按照200 r/min計算;Qr—絞龍橫斷面上每轉能通過的飼料流量,m3/r;ψ—充滿系數,據試驗,豎直絞龍的充滿系數約為0.3;V—料倉體積,m3;t—投飼時間,s;r0—絞龍軸半徑,mm;r—絞龍半徑,mm。計算得出r最小為25.1 mm,即最小直徑50.2 mm。
因此設計絞龍葉片直徑為54 mm。根據與儲料箱的設計尺寸互相配合,絞龍高度設計為660 mm。
2.2 儲料箱參數分析
根據實際養殖的需要,一般0.33 hm2的養殖蟹、蝦塘,其投飼量每天最大約為60 kg,根據每天最大投飼量時分3次投喂,因此每次料箱容納飼料(350 kg/m3)需20 kg以上,綜合考慮設計移動投飼料箱0.08 m3。在養殖前期蟹、蝦個體體積較小的情況下,裝一次料可滿足一天的投喂量。在蟹、蝦的成長期,料箱容量仍可滿足一次投喂的需求。
投飼料箱采用上方為圓柱狀,下方為圓錐體的形式,要求投飼結束后殘余飼料盡量少,但是圓錐體料筒與水平面角度過大則會導致重心過高,進而使得投飼機構在移動投飼過程中發生傾倒。經過設計及試驗分析發現,當料倉圓錐體錐角為100°時,料箱中仍有3 kg的飼料堆積,而當調整到80°時,堆積情況得到了極大改善。研究表明,同一種飼料,錐角為80°時,殘余飼料僅為0.5 kg,且重心在合理范圍內,使浮船在水面上的穩定性得到提高。
3 試驗與分析
3.1 樣機試驗
該裝置于2017年8月在中國水產科學研究院漁業機械儀器研究所泖港中試基地完成各項功能測試。測量得知,撒料盤距離水面距離為0.62 m。選用了3種不同直徑的常用顆粒飼料,顆粒直徑分別為3 mm(飼料1)、2.5 mm(飼料2)、1 mm(飼料3),其中,飼料1為膨化顆粒飼料,密度較小。根據試驗大綱,對每一種飼料進行撒料盤轉速與投飼半徑關系的試驗。隨后,對其基本參數進行對比試驗,將每一種撒出去的飼料收集起來,用20目網篩對破碎顆粒飼料篩選,進行稱重和飼料總量相除后乘以100%,得出破碎率。每一種飼料試驗結束后,將料箱剩余飼料倒出做殘飼量對比,將剩余飼料稱重和總飼料相除后乘以100%,得出殘飼率。
3.2 基本性能參數試驗與分析
試驗過程中,投飼機運行平穩、工作安全可靠。通過對不同種類的飼料進行試驗,結果如圖5和表1所示。
根據圖5可知,通過對撒料盤轉速的調節,飼料投飼直徑在1.2~5.8 m,當轉速在調節到220 r/min時,飼料1投飼直徑達到2.8 m,飼料2投飼直徑3.6 m,飼料3投飼直徑達到5.8 m;當轉速調節到100 r/min時,飼料投飼直徑相差不大,在1.2~1.8 m。3種不同直徑的飼料顆粒之間存在差異,主要原因是飼料顆粒密度、體積不同。飼料1密度小、體積大,計算時沒有考慮空氣阻力的影響,當飼料顆粒離開撒料盤做平拋運動,顆粒體積較大時,空氣阻力的影響便不能忽略,因此出現圖5中兩種體積相近但密度不同的飼料顆粒在相同轉速下投飼半徑出現較大差異。蟹、蝦幼苗期要求投飼半徑較大,飼料應大范圍均勻投飼;隨著蟹、蝦的生長,其活動區域越來越大,飼料投飼區間也可以相對減小,通過控制行走機構的行走速度來控制投飼區域的投飼量。該裝置的投飼半徑也符合蝦、蟹的生長特性,具有一定使用價值。
由表1可知,在轉速220 r/min下,按每種飼料10 kg量進行投飼試驗,3種飼料顆粒破碎率分別為1.08%、1.7%、0.46%,該移動投飼裝置平均破碎率在1%左右;殘飼率在2%~8%,裝置工作功率在19.2~33.6 W,表明該裝置對于不同種類顆粒飼料功率變化較為穩定,且遠低于所選電機額定功率。
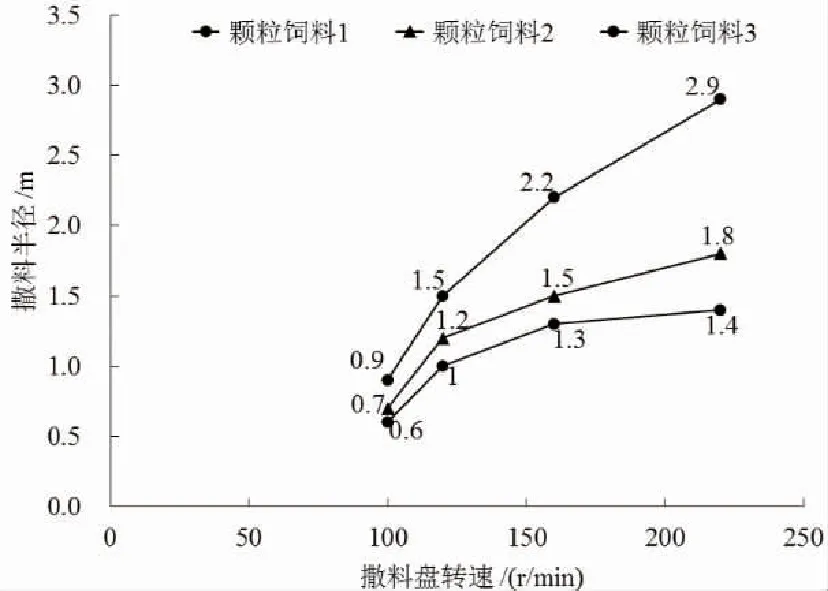
圖5 3種飼料在不同轉速下的投飼半徑

項目顆粒直徑/mm投飼量/kg殘飼量/kg殘飼率/%破碎量/kg破碎率/%工作電流/A工作電壓/V功率/W飼料13100.220.1081.080.92421.6飼料22.5100.880.171.700.82419.2飼料31100.770.0460.461.42433.6
4 結論
池塘移動式投飼裝置體積小,便于組裝移動,適合大中型養殖池塘進行飼料投喂,克服了定點投喂中存在的拋撒不均勻、拋撒面積小等缺陷,可減少大型投飼裝置的資金投入,實現半自動化投喂,降低人工成本。該裝置可根據需要進行調節,以滿足不同大小池塘的養殖需要,提高飼料利用率,并且具有較高的實用性和科學性,適宜向廣大養殖池塘推廣使用。
□