運動視頻圖像中運動方向自動檢測系統(tǒng)設計
2018-07-10 07:20:04薛良磊
現(xiàn)代電子技術(shù) 2018年13期
薛良磊
摘 要: 針對自動檢測系統(tǒng)存在運動方向檢測不準確、速度慢、耗費時間長以及功能相對單一等問題,且成本較高,很難達到自動檢測實時、可靠的標準,為此,對運動視頻圖像中運動方向的自動檢測系統(tǒng)進行設計。自動檢測的硬件平臺由ARM的微型處理器、視頻圖像自動檢測模塊、信號探測采集模塊、報警警示燈模塊以及各個連接口組成;系統(tǒng)軟件設計主要包含運動方向跟蹤和PID控制。實驗結(jié)果表明,該系統(tǒng)運動方向檢測準確、速度快、耗費時間短,并且耗費成本較低,可靠性與實時性較強。
關鍵詞: 運動視頻圖像; 報警; 信號探測; 運動方向; 自動檢測; PID控制
中圖分類號: TN911.73?34; TP391.4 文獻標識碼: A 文章編號: 1004?373X(2018)13?0111?04
Abstract: Since the traditional automatic detection system has the problems of inaccurate detection result, slow speed, long time consumption in motion direction detection, relatively simple functions and high detection cost, and is difficult to achieve the real?time and reliable automatic detection, an automatic detection system of target motion direction in sports video image is designed. The hardware platform of the automatic detection is composed of ARM microprocessor, video image automatic detection module, signal detection and acquisition module, alarm warning lamp module and their connection ports. The design of the system software mainly includes the motion direction tracking and PID control. The experimental results show that the system has the advantages of accurate result, fast speed, low time consumption for target motion direction detection, low cost, high reliability and real?time performance.
Keywords: motion video image; alarm; signal detection; motion direction; automatic detection; PID control
0 引 言
隨著數(shù)字化的運動方向自動檢測系統(tǒng)正在向智能化的方向不斷發(fā)展,對視頻圖像目標自動檢測技術(shù)的應用成為重要的研究方向之一,也是現(xiàn)代各個領域廣泛應用的關鍵技術(shù)之一[1]。運動方向在視頻圖像自動檢測時存在噪聲、模糊、光照等干擾因素的影響,導致運動方向檢測缺乏實時、可靠的數(shù)據(jù)。
針對傳統(tǒng)自動檢測系統(tǒng)中的不足,對運動視頻圖像中運動方向的自動檢測系統(tǒng)進行設計。自動檢測的硬件平臺是由ARM的微型處理器、視頻圖像自動檢測模塊、信號探測采集模塊、報警警示燈模塊以及各個連接口組成;系統(tǒng)軟件設計主要包含視頻的采集、運動方向跟蹤、PID控制。通過實驗驗證該系統(tǒng)的合理性,并得出實驗結(jié)論。實驗結(jié)果表明,基于視頻圖像運動方向自動檢測系統(tǒng)的設計,能通過對配準點的搜索提高自動檢測精準度,且實效性較強。
1 基于視頻圖像的運動方向自動檢測系統(tǒng)設計
1.1 自動檢測系統(tǒng)硬件設計與實現(xiàn)
運動視頻圖像中運動方向自動檢測的硬件平臺主要包括ARM的微型處理器、視頻圖像自動檢測模塊、信號探測采集模塊、報警警示燈模塊以及各個連接口,硬件的系統(tǒng)結(jié)構(gòu)如圖1所示。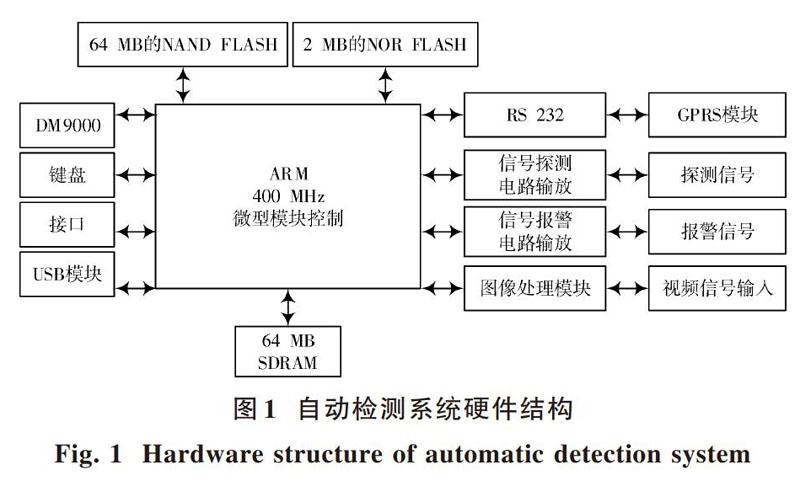
選擇S3C2440作為ARM920T微型處理器的系統(tǒng)芯片,通過對芯片內(nèi)部電路進行反饋控制獲取最高的頻率400 MHz,內(nèi)部集成是由USB,F(xiàn)LASH等控制器組成的,用來配合外部網(wǎng)絡與鍵盤等硬件設備,實現(xiàn)系統(tǒng)的擴展。通過兩片HY57V561620存儲器聯(lián)合組成64 MB存儲器。與此同時,選擇NAND的存儲設備作為系統(tǒng)外部的存儲[2]。主要存放Linux內(nèi)核以及根文件,選用對存儲器存儲更快的NOR FLASH用于專用程序的引導。采用串口通信方式,提供與主機自由通信的功能,利用串口將GPRS與無線通信模塊進行連接,進而實現(xiàn)系統(tǒng)的無線通信,隨時將檢測的結(jié)果傳送給用戶[3?4]。
在自動檢測的過程中根據(jù)視頻范圍選擇要檢測的目標,將運動方向通過視頻圖像傳輸?shù)接嬎銠C內(nèi)進行圖像采集,確定運動方向,使運動方向始終位于視頻監(jiān)視的范圍內(nèi),具體的流程如圖2所示,根據(jù)該流程完成系統(tǒng)硬件設計部分。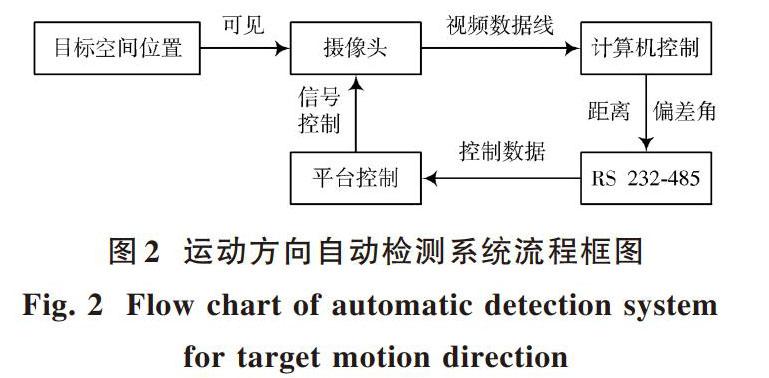
1.2 系統(tǒng)軟件設計
基于視頻圖像的運動方向自動檢測系統(tǒng)軟件設計主要包含運動方向跟蹤、PID控制兩個部分。
1.2.1 運動方向自動檢測算法
自動檢測算法是整個運動視頻圖像自動檢測系統(tǒng)設計的核心,采用基于連續(xù)自適應的平均遷移算法能夠使系統(tǒng)的魯棒性變強[5]。利用動作的特征在視頻圖像中找到運動的方向,并在下一幀的視頻圖像中利用運動目標找到搜索窗口,重復該過程實現(xiàn)對運動方向的連續(xù)檢測。當檢測運動方向時,該算法能從視頻圖像的特征中獲得運動方向概率分布。算法的具體流程如圖3所示。
由圖3可知,該算法的核心部分是特征的概率分布、搜索窗的質(zhì)心、搜索窗面積。從視頻圖像中找到運動所在的位置,該部分稱為平均值的遷移算法。
根據(jù)運動方向特征進行聚類分析,主要包括以下幾個步驟:
1) 設定搜索窗口規(guī)模;
2) 確定搜索窗口初始位置;
3) 計算搜索窗口中心位置結(jié)果;
4) 重復步驟3)直至收斂,視頻圖像中心位置移動距離小于假設的閾值。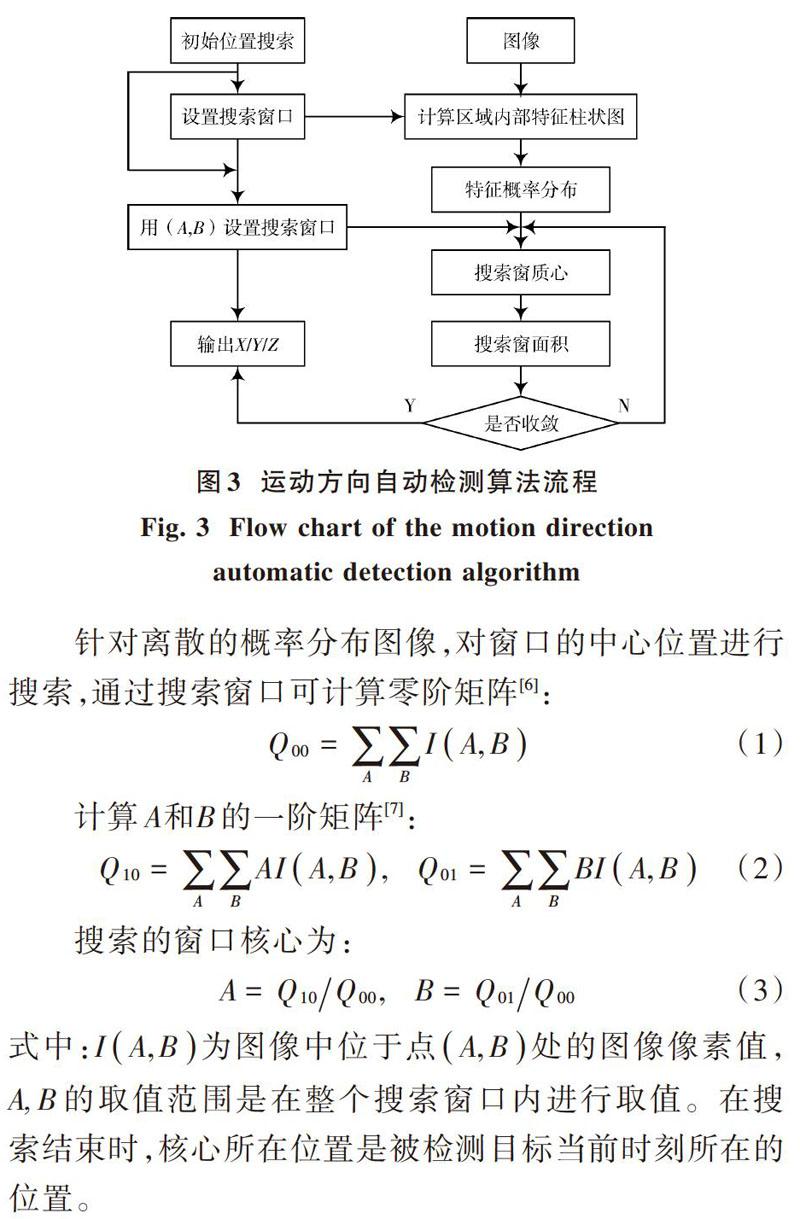
針對離散的概率分布圖像,對窗口的中心位置進行搜索,通過搜索窗口可計算零階矩陣[6]:
基于連續(xù)自適應的平均遷移算法是在運動視頻圖像中運動方向動態(tài)概率分布的基礎上進行的,在連續(xù)的視頻圖像中,運動目標的大小與位置變化容易導致動態(tài)概率分布波動較大[8],但是根據(jù)概率的分布情況能夠自由調(diào)整搜索窗口的大小,該軟件實現(xiàn)算法步驟如下:
1) 搜索窗口初始化;
2) 平均值遷移,保存搜索窗口零階矩陣;
3) 設定搜索窗口大小作為步驟2)中零階矩陣函數(shù);
4) 重復步驟2)和步驟3)直至收斂[9]。
在每次搜索前將窗口的初始值設為運動方向當前的位置與大小,由于搜索窗口在圖像目標可能會出現(xiàn)的區(qū)域附近進行檢測,這樣能夠節(jié)省大量搜索的時間,同時具有良好的實時性[10?11]。
1.2.2 PID控制
該控制程序利用PID工具箱實現(xiàn)控制功能,作為DLL能夠接受視頻圖像自動檢測程序的調(diào)用,進而形成控制信號,傳輸給云臺控制器。
經(jīng)過上述步驟,完成該系統(tǒng)軟件部分的設計。
2 實 驗
運動視頻圖像運動方向自動檢測經(jīng)過多次對實際運動方向的現(xiàn)場實驗,對鎖定后的運動目標可進行自動檢測,如圖4所示。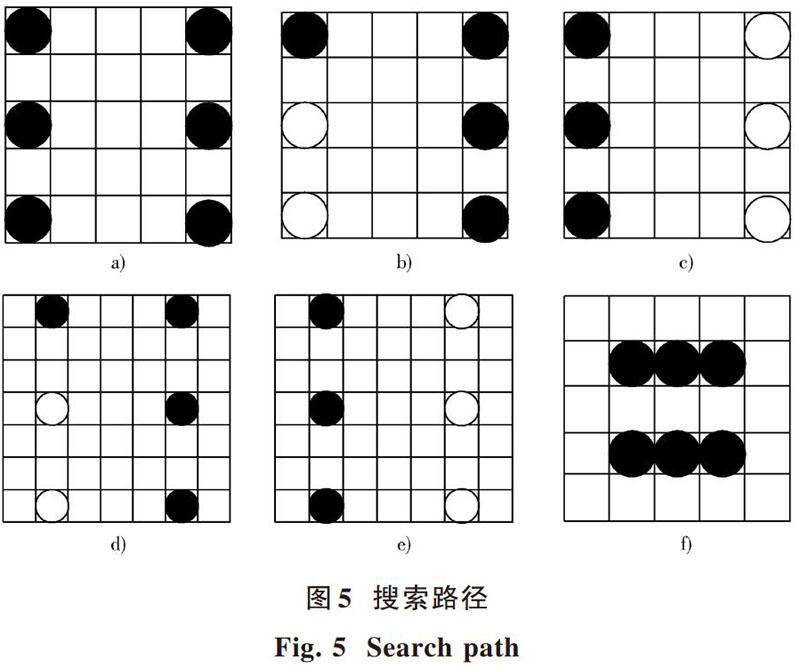
在分辨率為[256×256]的情況下,根據(jù)國內(nèi)其他視頻圖像自動檢測的標準,控制檢測精度在[±2]像素以上,并在同等質(zhì)量的標準下,平均幀的處理時間為20 m/s以上。
2.1 實驗結(jié)果與分析
以自動檢測的搜索窗口為中心,在5×5的搜索窗口內(nèi)對6個運動方向進行配準,如果自動檢測精度值大于正常值,需要進行第4步;如果自動檢測精度值小于等于正常值,需要進行第2步,如圖5a)所示。假設該系統(tǒng)自動檢測到向東西南北運動的精度值大于等于向上下運動的精度值,如果相關值在該范圍內(nèi),那么搜索窗口為5×5,根據(jù)上述內(nèi)容可將搜索方式分為兩種:一種是最大值出現(xiàn)在角落里,那么需要對這6個點進行下一步搜索,如圖5b)所示;另一種是如果最大值出現(xiàn)在水平線或者垂直線上,那么也需要對這6個點進行下一步搜索,如圖5c)所示。
如果相關值小于運動自動檢測向上下方向運動的精度值,搜索方式如上,但是搜索窗口將變大為[7×7],如圖5d)和圖5e)所示。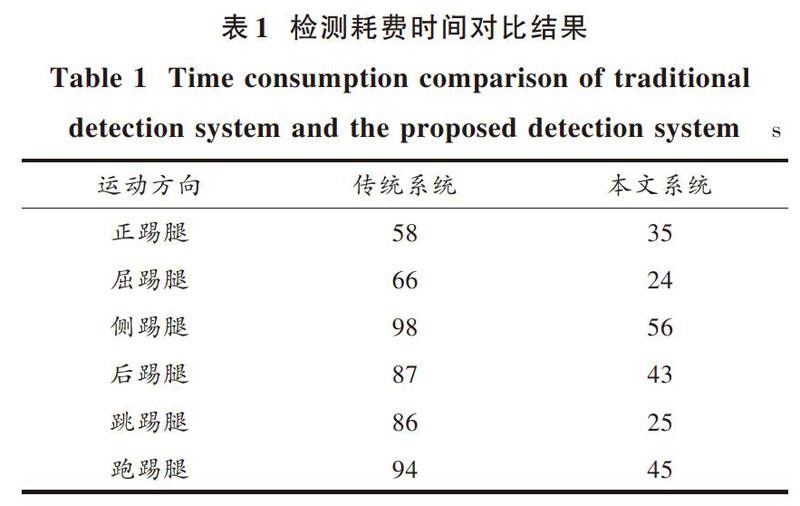
當搜索窗口縮小為3×3時,需要對窗口內(nèi)的6個點距離進行計算,如圖5f)所示,通過搜索該范圍內(nèi)的中心點進行歸一化處理獲取相關值的最大點,即為最佳的配準點。
通過對該配準點的搜索能夠提高自動檢查的精準度,且實效性較強。
為了驗證該系統(tǒng)自動檢測所耗費的時間,將運動中的踢腿方向作為檢測標準,主要包括:正踢腿、屈踢腿、側(cè)踢腿、后踢腿、跳踢腿、跑踢腿。將傳統(tǒng)系統(tǒng)檢測所耗費的時間與基于視頻圖像的運動方向自動檢測系統(tǒng)所耗費的時間進行對比,結(jié)果如表1所示。
由表1可知,使用傳統(tǒng)自動檢測系統(tǒng)對于正踢腿方向進行檢測所耗費的時間為58 s,與設計的基于視頻圖像運動方向自動檢測系統(tǒng)耗費的時間相比較長,而對于其他踢腿方向進行檢測耗費的時間都較長,遠遠不如本文設計系統(tǒng)檢測的速度快。
2.2 實驗結(jié)論
基于視頻圖像運動方向自動檢測系統(tǒng)的設計,能夠通過對配準點的搜索提高自動檢測精準度,且實效性較強。使用傳統(tǒng)自動檢測系統(tǒng)對于正踢腿方向進行檢測耗費的時間與設計的基于視頻圖像運動方向自動檢測系統(tǒng)耗費的時間相比較長,而對于其他踢腿的方向進行檢測耗費的時間都較長,遠遠不如本文設計系統(tǒng)檢測的速度快。
3 結(jié) 語
自動檢測技術(shù)是一個具有挑戰(zhàn)性的研究范疇,采用基于微型處理器的硬件平臺設計,能夠利用連續(xù)自適應的平均遷移算法實現(xiàn)對運動方向的檢測,及時將異常報告呈現(xiàn)給遠程的戶主。利用嵌入式系統(tǒng)能夠提高該系統(tǒng)的可靠性與實時性,還能節(jié)約成本,對運動方向進行智能化檢測。
參考文獻
[1] 車益民.體育訓練中的運動視頻分析系統(tǒng)設計與實現(xiàn)[J].現(xiàn)代電子技術(shù),2017,40(5):70?73.
CHE Yimin. Design and implementation of moving video analysis system in sports training [J]. Modern electronics technique, 2017, 40(5): 70?73.
[2] 陳文青,王濤.基于行為視覺的行人摔倒自動檢測系統(tǒng)設計[J].現(xiàn)代電子技術(shù),2016,39(20):87?91.
CHEN Wenqing, WANG Tao. Design of pedestrian tumble automatic detection system based on behavior vision [J]. Modern electronics technique, 2016, 39(20): 87?91.
[3] 方宏俊,宋利,解蓉.一種用于電視系統(tǒng)中的視頻噪聲檢測的優(yōu)化算法設計[J].電視技術(shù),2015,39(14):89?93.
FANG Hongjun, SONG Li, XIE Rong. An optimization algorithm design for video noise detection in TV system [J]. Video engineering, 2015, 39(14): 89?93.
[4] 雷林,李樂鵬,李準,等.自動檢測及放大視頻中的微小運動[J].小型微型計算機系統(tǒng),2016,37(9):2120?2124.
LEI Lin, LI Lepeng, LI Zhun, et al. Automated detection and magnification of small motion in videos [J]. Journal of Chinese computer systems, 2016, 37(9): 2120?2124.
[5] 李忠海,邢曉紅,金海洋.基于視頻監(jiān)控的人的異常行為系統(tǒng)設計[J].火力與指揮控制,2017,42(4):165?170.
LI Zhonghai, XING Xiaohong, JIN Haiyang. System design of human abnormal behavior based on video surveillance [J]. Fire control & command control, 2017, 42(4): 165?170.
[6] 李春木,連迅.民族傳統(tǒng)體育對抗類項目視頻分析與智能診斷系統(tǒng)研究[J].廣州體育學院學報,2016,36(1):52?56.
LI Chunmu, LIAN Xun. Study on video analysis of the national traditional sports project and intelligent diagnosis system [J]. Journal of Guangzhou Sport University, 2016, 36(1): 52?56.
[7] 鄭冰,趙陽,葛東林.農(nóng)機快速導航系統(tǒng)設計:基于圖像邊緣檢測和3D深度視頻幀內(nèi)編碼[J].農(nóng)機化研究,2018,40(5):181?184.
ZHENG Bing, ZHAO Yang, GE Donglin. Design for fast navigation system of agricultural machinery based on image edge detection and 3D depth video coding [J]. Journal of agricultural mechanization research, 2018, 40(5): 181?184.
[8] 李和香.基于物聯(lián)網(wǎng)視覺的旅游景區(qū)異常情況圖像自動識別系統(tǒng)設計[J].現(xiàn)代電子技術(shù),2017,40(4):124?127.
LI Hexiang. Design of IOT vision based image automatic identification system for tourist attraction abnormalities [J]. Modern electronics technique, 2017, 40(4): 124?127.
[9] 曹義親,程威,黃曉生.關于視頻圖像運動目標跟蹤識別仿真研究[J].計算機仿真,2017,34(1):191?196.
CAO Yiqin, CHENG Wei, HUANG Xiaosheng. Simulation research on tracking and recognition of moving objects in video images [J]. Computer simulation, 2017, 34(1): 191?196.
[10] 王霞,付曉靜,王楠,等.預決策金字塔層數(shù)的歐拉視頻微弱運動放大算法[J].科學技術(shù)與工程,2016,16(1):114?118.
WANG Xia, FU Xiaojing, WANG Nan, et al. Pre?decision pyramid layers of Eulerian video magnification algorithm for subtle movements [J]. Science technology and engineering, 2016, 16(1): 114?118.
[11] 徐濟惠,祝曉東,劉翠娟,等.數(shù)字視頻分析中快速邊緣檢測和運動估計研究[J].計算機測量與控制,2016,24(5):242?245.
XU Jihui, ZHU Xiaodong, LIU Cuijuan, et al. Research on fast edge detection and motion estimation in digital video analysis [J]. Computer measurement & control, 2016, 24(5): 242?245.
