一種基于各向異性磁阻的旋轉(zhuǎn)編碼器
2018-07-10 01:00:16毛偉軍
通信電源技術(shù) 2018年4期
余 蓉,毛偉軍
(1.馭芯科技(上海)有限公司,上海 201318;2.上海麥歌恩微電子股份有限公司,上海 201318)
0 引 言
編碼器是將機(jī)械運(yùn)動(dòng)中轉(zhuǎn)速、位移和轉(zhuǎn)度等物理量轉(zhuǎn)變?yōu)閿?shù)字脈沖化電信號(hào)的一類(lèi)傳感器件[1]。旋轉(zhuǎn)編碼器通常用于旋轉(zhuǎn)物體角度和速度的測(cè)量,通常與電機(jī)配合,在工業(yè)自動(dòng)化控制、家用電器和辦公自動(dòng)化設(shè)備等方面有著廣泛應(yīng)用[2]。
旋轉(zhuǎn)編碼器按輸出形式可以分為絕對(duì)型編碼器和增量型編碼器;按原理可以分為接觸式旋轉(zhuǎn)編碼器和非接觸式旋轉(zhuǎn)編碼器[3]。電位計(jì)是典型的接觸式傳感器,由于機(jī)械接觸的原理,其存在可靠性低、使用壽命有限等固有缺陷。常用的非接觸式旋轉(zhuǎn)編碼器主要有光電編碼器、磁旋轉(zhuǎn)編碼器、脈沖發(fā)生器和霍爾元件等。目前,應(yīng)用最廣的是光電編碼器,基本原理是由一個(gè)紅外對(duì)射式光電傳感器和一個(gè)由遮光線和空隔構(gòu)成的碼盤(pán)組成,當(dāng)碼盤(pán)旋轉(zhuǎn)時(shí),遮光線和空隔能阻攔紅外光束或讓其通過(guò)。但是,光電編碼器受環(huán)境的影響較大,對(duì)灰塵油污和潮濕氣體等敏感,可靠性差。磁旋轉(zhuǎn)編碼器一般為封閉式結(jié)構(gòu),不易受外界環(huán)境的影響,且能實(shí)現(xiàn)小型化,低成本,高可靠性。
1 各向異性磁阻技術(shù)概述
在通有電流的金屬或半導(dǎo)體上施加磁場(chǎng)時(shí),它的電阻值將發(fā)生明顯變化,這種現(xiàn)象稱(chēng)為磁致電阻效應(yīng),也稱(chēng)磁電阻效應(yīng)(MR)。
某些金屬如鐵、鈷、鎳及其合金等,其磁阻變化與磁場(chǎng)和電流間夾角有關(guān)。當(dāng)外部磁場(chǎng)與磁體內(nèi)建磁場(chǎng)方向成0°角時(shí),電阻不會(huì)隨著外加磁場(chǎng)變化而發(fā)生改變;當(dāng)外部磁場(chǎng)與磁體的內(nèi)建磁場(chǎng)有一定角度時(shí),磁體內(nèi)部磁化矢量會(huì)偏移,薄膜電阻降低,稱(chēng)為各向異性磁電阻效應(yīng)(Anisotropic Magnet Resistive Sensor,簡(jiǎn)稱(chēng)AMR)。
1857年,Thomson發(fā)現(xiàn)坡莫合金(Ni-Fe)的各向異性磁阻效應(yīng)。從圖1中可以清晰發(fā)現(xiàn),當(dāng)磁場(chǎng)方向與電流方向平行時(shí),磁阻的變化值最大;當(dāng)磁場(chǎng)方向與電流方向垂直時(shí),磁阻的變化最小。而當(dāng)磁場(chǎng)方向與電流方向成45°夾角附近時(shí),磁阻工作于線性區(qū),可以實(shí)現(xiàn)輸出的線性特性。
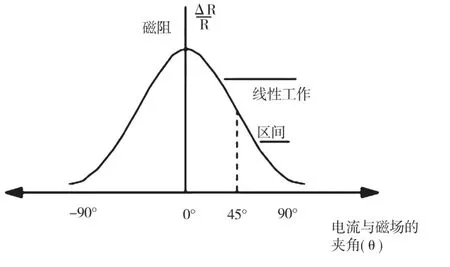
圖1 坡莫合金的AMR效應(yīng)
AMR磁阻傳感器采用四個(gè)磁阻組成惠斯通電橋,如圖2所示。當(dāng)在電橋上施加偏置磁場(chǎng)H在電橋上時(shí),兩個(gè)相對(duì)位置的電阻磁化方向會(huì)朝著電流方向轉(zhuǎn)動(dòng),這兩個(gè)磁阻的阻值會(huì)增加;另外兩個(gè)電阻的磁化方向會(huì)朝著電流相反的方向轉(zhuǎn)動(dòng),其電阻值會(huì)減少。通過(guò)測(cè)量電橋兩端輸出的電壓差信號(hào),即可得到外界的磁場(chǎng)值。
AMR磁阻傳感器感應(yīng)的是磁場(chǎng)方向的變化,因此可以靈敏探測(cè)地磁場(chǎng)范圍內(nèi)的磁場(chǎng),是相對(duì)于霍爾技術(shù)成本更低的一種解決方案,通常可以用于導(dǎo)航、旋轉(zhuǎn)位置傳感器和電流傳感器等各種應(yīng)用場(chǎng)合。

圖2 AMR傳感器等效電路

圖4 MTR611輸出信號(hào)圖
2 基于AMR技術(shù)的旋轉(zhuǎn)編碼器設(shè)計(jì)
本方案采用的AMR磁阻傳感器是MagnTek推出的MTR611。該芯片內(nèi)部有2個(gè)AMR惠斯通電橋,工作于飽和磁場(chǎng)狀態(tài)下。在這種工作模式下,電橋電阻的改變僅僅取決于磁場(chǎng)方向,而非施加的磁場(chǎng)強(qiáng)度。該特性決定了AMR技術(shù)特別適合用于角度測(cè)量,而不是像傳統(tǒng)的霍爾技術(shù)需要特殊的磁路設(shè)計(jì)來(lái)間接測(cè)量磁場(chǎng)方向。在磁場(chǎng)方向轉(zhuǎn)動(dòng)過(guò)程中,能分別對(duì)應(yīng)輸出正弦和余弦曲線,配合合適的磁鐵,即可用于線性或角位移檢測(cè)。
MTR611的輸出信號(hào)是毫伏特級(jí)別,電機(jī)控制器無(wú)法直接使用,即需要對(duì)輸出信號(hào)進(jìn)行放大等處理。
本旋轉(zhuǎn)編碼器通過(guò)MCU控制,對(duì)AMR磁阻傳感器的輸出信號(hào)進(jìn)行放大、模數(shù)轉(zhuǎn)換、數(shù)字濾波,然后通過(guò)Cordic算法進(jìn)行計(jì)算,將采集到的信號(hào)解碼成電機(jī)控制器可以使用的角度信息。它有兩種輸出形式可選,分別為ABZ增量信號(hào)和0~5 V模擬線性輸出,且可以同時(shí)提供SPI信號(hào)接口。具體實(shí)現(xiàn)框圖如圖3所示。
電機(jī)轉(zhuǎn)動(dòng)時(shí),搭配的磁鐵形成一個(gè)變化的磁場(chǎng),各向異性磁阻(AMR)芯片采集磁場(chǎng)變化信號(hào),將其轉(zhuǎn)換成正弦和余弦輸出信號(hào),如圖4所示。AMR輸出信號(hào)經(jīng)放大器(PA)進(jìn)行放大,進(jìn)入MCU進(jìn)行處理。MCU包含模數(shù)轉(zhuǎn)換模塊(ADC)、數(shù)字濾波、計(jì)算和輸出等模塊。模數(shù)轉(zhuǎn)換模塊(ADC)將放大后的正弦和余弦信號(hào)轉(zhuǎn)換成數(shù)字信號(hào),經(jīng)過(guò)數(shù)字濾波,通過(guò)Cordic算法對(duì)數(shù)字信號(hào)進(jìn)行計(jì)算,并解碼成角度信息。包含角度信息的信號(hào)一路通過(guò)數(shù)模轉(zhuǎn)換模塊(DAC)轉(zhuǎn)換成0~5 V的模擬線性輸出信號(hào);另一路進(jìn)行插值計(jì)算,轉(zhuǎn)換成A、B、Z的增量信號(hào)輸出,輸出信號(hào)如圖5所示。圖6是MCU的SPI信號(hào)圖。

圖5 A、B、Z增量輸出信號(hào)圖
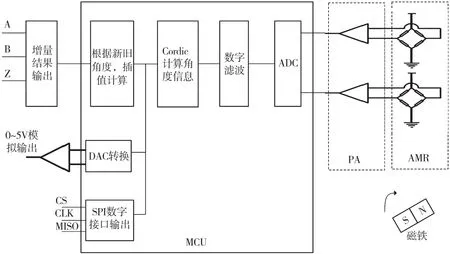
圖3 旋轉(zhuǎn)編碼器電路原理框圖
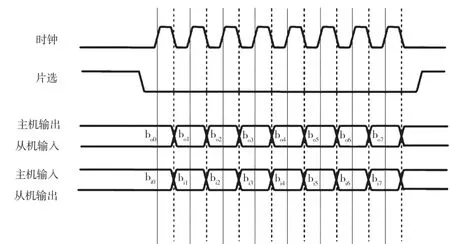
圖6 SPI信號(hào)圖
3 結(jié) 論
綜上所述,通過(guò)對(duì)各向異性磁阻技術(shù)的研究,設(shè)計(jì)了一種用于測(cè)量電機(jī)轉(zhuǎn)動(dòng)位置的旋轉(zhuǎn)編碼器的低成本解決方案。采用各向異性磁阻技術(shù)對(duì)感應(yīng)信號(hào)進(jìn)行放大,通過(guò)MCU進(jìn)行模數(shù)處理、數(shù)字濾波和算法計(jì)算,實(shí)現(xiàn)了模擬線性和數(shù)字增量信號(hào)等多種輸出方式,降低了旋轉(zhuǎn)編碼器的成本。
[1] 裴 軼,虞南方,劉 奇,等.各向異性磁阻傳感器的原理及其應(yīng)用[J].儀表技術(shù)與傳感器,2004,(8):26-27.
[2] Josef Janisch.非接觸式旋轉(zhuǎn)編碼器綜述[J].世界產(chǎn)品與技術(shù),2006,(4):53-54.
[3] 王小祥.增量式旋轉(zhuǎn)編碼器的簡(jiǎn)介與應(yīng)用[J].數(shù)字技術(shù)與應(yīng)用,2016,(10):118-119.
猜你喜歡
當(dāng)代陜西(2022年6期)2022-04-19 12:11:54
計(jì)算機(jī)應(yīng)用(2022年2期)2022-03-01 12:33:42
娃娃樂(lè)園·綜合智能(2021年12期)2022-01-18 05:46:42
計(jì)算機(jī)應(yīng)用(2021年4期)2021-04-20 14:06:36
鴨綠江(2021年35期)2021-04-19 12:24:18
計(jì)算機(jī)應(yīng)用(2021年1期)2021-01-21 03:22:38
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
中學(xué)生數(shù)理化·高二版(2016年12期)2017-02-28 10:08:42
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25