基于Compact RIO的聲信號處理模塊在超短基線定位中的應用?
2018-07-10 09:18:30郭燕子
艦船電子工程 2018年6期
于 平 郭燕子
(91388部隊 湛江 524022)
1 引言
超短基線(USBL)定位系統通過測量信號到達接收單元各通道之間的相位差來估算目標方位,再通過測量目標到接收陣之間的斜距來實現定位,而斜距的測量靠測定信號在目標和接收陣之間的傳播時延來實現。USBL系統一般在高輸入信噪比條件下工作,通帶內的輸入信噪比通常要大于15dB,由于噪聲的干擾,信號的相位會產生起伏,同時也存在時延測量的誤差,從而直接影響定位精度[8~11]。
本文提出一種基于Compact RIO嵌入式系統的聲信號處理模塊,用以實施信號采樣、存儲及處理各種不同類型的模擬信號,通過結合Compact RIO高速數據處理能力和LabVIEW圖形化開發環境,實現實時水聲信號采集、處理,并應用于超短基線定位系統中。水下定位試驗驗證了模塊的可行性和實用性,定位精度滿足系統設計要求。
2 浮標式超短基線定位
浮標式超短基線組合定位系統采用常規的超短基線定位方法對水下目標進行定位[8~11],時差或時延采用最大似然估計。
系統包括四元超短基線水聽器陣、模擬接收機、Compact RIO信號處理器、同步時鐘接口以及終端處理機等。方位姿態信號與GPS信號經串口連同接收水聲信號傳送到Compact RIO進行解算。如圖1所示,浮體在海面上漂浮,星站式GPS的天線等效中心安裝在浮體中位于圓形結合面的中央,天線要高出海洋的水平面。高精度的航向姿態傳感器,能給出浮體及短基線中心精確的航向角、縱傾角和橫搖角。浮體的延長桿底部安裝一個超短基線陣,對目標聲源進行聲學定位。
3 基于Compact RIO的聲信號處理模塊設計[1~7]
采用擁有可編程自動化控制器RT和FPGA的Compact RIO設計數字信號處理機。數字信號處理機硬件平臺可以對4個通道進行數據采集,同時和2個標準串口連接,完成信號處理器與終端處理器、差分GPS、方位姿態儀的數據通信。水聲信號經過模擬接收電路后,Compact RIO對四路水聲信號作相關處理得到時延值,結合同步周期內采集到的方位姿態儀和差分GPS的數據進行定位修正處理,解算出目標聲源的位置坐標。
3.1 信號采集
信號采集直接決定對水聲信號分析的準確度,在整個系統中占有很重要的地位。根據乃奎斯特定理,最低采樣頻率大于信號頻率的2倍,選擇采樣頻率一般設置為輸入信號最高頻率的7~10倍,在此情況下,就可以正確地還原波形,得到理想的波形。
3.2 IIR濾波器
數字濾波器是通過一定運算關系濾除輸入信號的某些頻率成分或改變某些頻率成分的相對比例的器件。
根據系統要求只需調整式(1)中的ak和bk即可符合濾波器的技術指標。程序框圖如圖2。
3.3 信號包絡提取
通常用希爾伯特幅值解調法來提取信號的包絡,其原理圖如圖3所示,信號包絡提取程序如圖4。
如x(t)為原始信號,y(t)為濾波后的信號,則y(t)的 Hilbert變換為
3.4 RT處理器
RT是實時處理器,主要完成從FPGA中取出數據,測出相關時延,同時讀取GPS和姿態儀數據,結合超短基線數據對吊放聲源進行定位,同時將定位結果傳送到終端處理機,如圖5所示。對GPS數據讀取是一樣的。
4 水下試驗
進行了浮標式短基線定位系統對吊放目標聲源的水中定位試驗。目標聲源吊放深度為40m,在頂部裝有GPS,提供一個參考位置,由于是在湖中試驗,忽略水流影響,近似認為GPS位置即為吊放聲源位置。我們在水平面內距浮標式短基線定位分系統距離分別為5m、12.5m和18.7m的三個位置進行了試驗,如圖6。
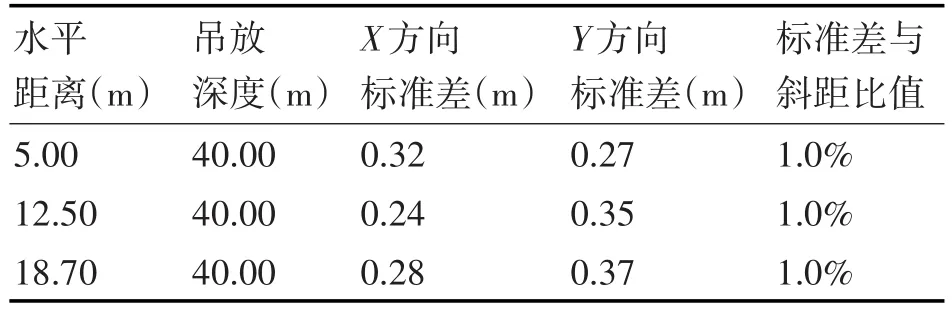
表1 標準誤差圖
以吊放式聲源頂部的GPS位置為原點,利用中分緯度法,給出在一段觀察時間內,實測值和參考值在平面坐標中的位置關系,定位結果發現,在A、B、C三個測量點的測量值和參考值基本上是重合的,說明系統的測量結果是可靠的。在三個位置時X方向(正北方向)和Y方向(正東方向)的測量值的標準差如表1所示。
5 結語
本文利用虛擬儀器技術,結合NI公司的Com?pact RIO編程控制器及主控計算機,實現了一套集數據采集、存儲、顯示和信號實時處理于一身的超短基線數據處理綜合系統。系統可以獨立完成水聲陣列信號的采集和大運算量的實時信號處理,本系統開發周期短、效率高,其可靠性、穩定性、測試精度等方面性能優越,并具備良好的擴展性和可維護性,有著廣泛的應用前景。
[1]張桐,陳國順,王正林.精通LabVIEW程序設計[M].北京;電子工業出版社,2008:61-123
[2]林正盛.虛擬儀器技術及其應用[J].電子技術應用,1997(3):67-121.
[3]何芝霞,黃昶等.共享變量技術在Compact RIO中的應用[J].計算機系統應用,2008,12:121-123.
[4]李猛,金世俊.基于Compact RIO的應變采集系統的設計和實現[J].研究與開發,2007,26(7):12-14.
[5]劉麗桑.基于LabVIEW的虛擬信號處理系統[J].工業控制計算機,2007(9):53-54.
[6]佟春明,王天利.基于LabVIEW的信號處理系統開發[J].遼寧工學院學報,2003,23(6):17-20.
[7]張旭,張春梅,王尚錦.虛擬儀器軟件LabVIEW和數據采集[J].微機發展,2004(3):77-79.
[8]吳永亭,周興華,楊龍.水下聲學定位系統及其應用[J]. 海洋測繪,2003,23(4):18-21.
[9]R.J.尤立克.水聲原理[M].洪申譯.哈爾濱船舶工程學院出版社,1990:79-183
[10]錢洪寶,孫大軍.水聲定位系統現狀[J].聲學技術,2011,30(3):389-391.
[11]劉伯勝,雷家煜.水聲學原理[M].哈爾濱:哈爾濱工程大學出版社,2002:59-119.
[12]馬大猷.現代聲學理論基礎[M].北京:科學出版社,2004:5-31.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(2017年9期)2017-09-26 03:41:45