火星車坡道式轉移機構方案設計與分析
2018-07-06 08:46:00劉衛馬超鄢青青滿劍鋒劉榮凱季節錢成
航天器工程 2018年3期
關鍵詞:設計
劉衛 馬超 鄢青青 滿劍鋒 劉榮凱 季節 錢成
(1 北京空間飛行器總體設計部,北京 100094) (2 哈爾濱工業大學機器人技術與系統國家重點實驗室,哈爾濱 150001)
在星球巡視探測任務中,星球車一般要通過帶有緩沖裝置的著陸器搭載,待著陸器軟著陸后,通過轉移機構安全轉移至星球表面[1-4]。著陸器在星球表面軟著陸時存在非常多的不確定性[5],使得星球車的安全轉移尤為關鍵。20世紀70年代初期,蘇聯向月球投送了無人月球探測器月球車-1,2(Lunokhod-1,2)。Lunokhod安放在著陸器上表面,著陸器前后均布置1套轉移機構[6-7]。美國阿波羅(Apollo)系列任務采用的轉移機構,由航天員在著陸后手動操控繩索與導輪完成月球車的抽出與展開[8]。美國于1996年12月4日發射火星探路者(MPF)著陸器,搭載索杰納(Sojourner)火星車,MPF著陸器結構由1塊基板和3塊側板組成,收攏狀態為四面體。Sojourner利用2條收攏在側板上的柔性坡道進行轉移[9-10]。美國于2003年6月10日和7月1日分別向火星投送了2輛相同的火星車——火星探測巡視器(MER)。MER著陸器與MPF著陸器的構造相似,不同的是,著陸器側板展開后,連接在側板之間的纖維布隨之展開,在MER的3個方向形成柔性轉移坡道,使MER火星車可根據情況選擇不同的方向轉移[11-13]。2012年8月6日,美國火星科學實驗室(MSL)采用下降平臺(帶有4組反推力火箭發動機)懸掛火星車的方式完成著陸釋放,突破了基于著陸平臺轉移方式的限制,可以在傾角不大于15°、巖石尺寸包絡不大于0.55 m的復雜地形著陸[14-16]。2013年12月2日,中國發射了嫦娥三號探測器,并向月面投送了玉兔號月球車。著陸器軟著陸后,轉移機構展開,形成供月球車轉移的通道[17]。
著陸地形環境的復雜性及著陸器著陸姿態的隨機性,要求轉移機構能適應地形地貌,提供多方向的轉移通道,以保證星球車安全轉移并提高任務的可靠性。國內外星球著陸探測任務中,剛性轉移機構一般采用多套機構實現多方向的星球車轉移通道,轉移機構質量占比大,所占用的布局空間多。
本文以火星巡視探測任務為背景,提出了雙向可選展開的坡道式轉移機構方案設計。發射狀態下,可充分利用火星進入艙壁與火星車之間的空間,收攏折疊效率高;在展開時,根據地形條件選擇更為有利的方向展開,可為火星車提供剛性轉移坡道。在此基礎上,通過對各種地形因素的簡化處理,推導出地形因素、坡道長度等主要幾何參數與火星車轉移姿態的關系,進而以坡道角及異面角為設計目標,對坡道長度需求進行分析,可為類似的地外天體著陸巡視任務提供參考。
1 坡道式轉移機構方案設計
火星車轉移機構的首要功能是為火星車提供可靠的轉移通道,以緩沖腿方式著陸后,在火星車與火星表面間距較大的條件下,火星車轉移機構應具有足夠的長度,從而盡可能減小火星車轉移的坡道角。此外,鑒于火星存在大氣環境,火星車及轉移機構要包裹在進入艙背罩及防熱大底內,因此轉移機構的設計必須考慮進入著陸系統的外形及包絡尺寸,以滿足發射的包絡空間需求。圖1[18]為美國前期火星進入著陸任務探測器海盜號(Viking)進入艙的外形(后期的火星探測器氣動外形均參考了這種外形設計),主要由兩錐段的背罩及防熱大底組成。本文在提高轉移任務整體可靠性的目標下,以海盜號外形為依據,對火星車轉移機構要重點解決的布局設計、轉移通道方向的可選設計、展開長度最大化設計及輕量化設計等問題進行分析。
圖1 海盜號進入艙外形Fig.1 Viking aeroshell geometry
1.1 適合于火星探測器構型的布局設計
圖2為依據海盜號進入艙外形建立的包絡空間分析,在布置假想的火星車后,火星車占據了進入艙中心內的大部分空間,僅與進入艙背罩壁之間留有一些間距,即圖2中白色虛線標示的區域,轉移機構可用空間狹小且分散,被火星車分割成數塊區域。為滿足火星車轉移姿態要求,轉移機構在展開后應具有足夠的長度,而整個進入艙內沒有足夠平直的空間可供使用,對轉移機構的收攏布局設計造成了很大困難。防熱大底與火星車之間的區域,要布置著陸平臺,用于支撐火星車,很難與其他可用區域協同布置轉移機構。
圖2 包絡空間分析Fig.2 Analysis of folded envelope
為了充分利用進入艙內可用區域并提供雙向可選的轉移通道,本文設計了雙向可選展開的坡道式轉移機構,其收攏構型如圖3所示。在發射狀態下,坡道依靠鉸鏈連接為一體,呈拱形構型,2條坡道分別收攏在火星車上方,將火星車包裹在內。坡道兩端與平臺連接處均設計有根部鉸鏈,根部鉸鏈與坡道均通過火工品連接。每條坡道主要由3個部分組成,每部分之間由2處中間鉸鏈分別連接。根鉸為單向轉動鉸鏈,在收攏位置,每條坡道均可構成穩定的梯形結構,能經受發射段的力學載荷。
圖3 雙向可選展開坡道式轉移機構收攏構型Fig.3 Folded configuration of bidirectionally deployable ramp type transfer mechanism
1.2 雙向可選的轉移通道展開設計
火星著陸任務的未知因素多,著陸及轉移風險大,因此,轉移機構應能盡可能提供更為有利的轉移通道。在滿足包絡空間的前提下,本文設計的坡道式轉移機構可為火星車轉移提供2個方向的選擇,著陸后根據當地周邊環境再確定坡道展開方向,從而提高著陸環境適應性及轉移任務的可靠性。
雙向可選展開的坡道式轉移機構中,兩側的根鉸起到連接及分離作用,火工品起爆后,該側坡道隨即解鎖。火星車前后的根鉸均設計為可分離,因此坡道具備雙向可選展開的能力。在拋出背罩及防熱大底、著陸平臺著陸火星表面后,根據地形地貌確定坡道式轉移機構的展開方向,一側的火工品解鎖,解除坡道與根鉸及著陸平臺的連接。在未解鎖一側的根鉸及中間鉸鏈驅動力矩作用下,坡道式轉移機構向該方向展開,直至接觸火星表面,形成供火星車轉移用的通道,火星車即可由坡道行駛至火星表面。圖4給出了展開過程。
圖4 坡道式轉移機構展開過程
1.3 展開長度最大化設計
著陸后轉移機構展開到位,其最終坡道角與坡道長度、著陸區域地形、著陸點區域局部地貌及著陸器姿態等因素密切相關。在著陸區域地形、著陸點區域局部地貌等外在因素確定的條件下,火星車轉移過程中的坡道角主要由坡道長度決定,坡道長度越大,坡道角越小。雙向可選展開的坡道式轉移機構,充分利用了進入艙內、火星車前后及上方的3個小空間,轉移機構展開后可具有較大的長度。建立轉移機構收攏狀態模型如圖5所示,坡道兩側根鉸的安裝位置間距B,一般受火星車及著陸艙內空間制約,取值范圍有限,可視為固定值;η為火星車前、后方坡道與火星車下表面的夾角。
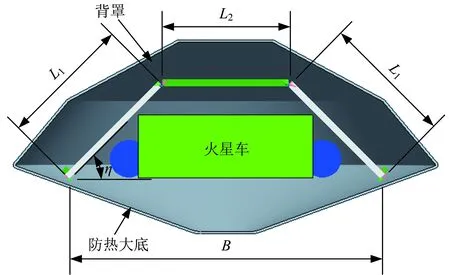
圖5 轉移機構收攏狀態模型Fig.5 Model of folded transfer mechanism
坡道總長度L是火星車兩側坡道長度L1及火星車上側坡道長度L2之和,而L1與L2之間滿足以下關系。
B=L1cosη+L2+L1cosη
(1)
則坡道總長度為
L=L1+L2+L1=B+2L1(1-cosη)
(2)
由此可知,在B一定的條件下,隨著η和L1的增大,坡道總長度也會增大。η及L1的取值范圍,由進入艙背罩及火星車的尺寸包絡決定。以圖1所示的海盜號進入艙外形為例,其最大外徑約為3.5 m,背罩高度約為1.05 m,考慮一定的安全間隙,單條坡道總長度范圍為3050~3400 mm。
1.4 輕量化及可靠性設計
火星探測為深空探測任務,對各組成部件的質量要求十分嚴格,在火箭運載能力確定不變的前提下,機構部件的超重將導致科學有效載荷資源受限,會影響任務的科學成果,因此火星車轉移機構還應滿足輕量化設計要求。本文設計的轉移機構主要由坡道、鉸鏈及火工品組成,自身組成簡單,有利于減少質量。并且,相比于每套機構實現單方向展開的常規設計,該機構僅設計1套轉移機構,利用連接分離鉸鏈的對稱設計,實現雙向可選展開,能顯著減少機構自身質量,具備輕量化設計優勢。
火星的低溫環境使著陸后蓄電池電能快速下降,轉移機構的自身動作應盡可能減少對電能的消耗,因此應盡量采用被動的無源驅動方式,進一步提高轉移機構的可靠性。本文設計的轉移機構無長期功耗的有源部件,耗能少,依靠鉸鏈驅動力矩即可實現展開。另外,雙向可選展開的坡道式轉移機構,2條坡道設計為相互獨立,當落地點存在凸起或凹坑時,坡道均可分別觸碰火星表面,增強了對地形的適應性,可靠性高。
1.5 優勢分析
國內外各任務中星球車轉移機構對比,如表1所示。除前文所述的優點外,本文提出的坡道式轉移機構方案,展開后形成的剛性坡道承載能力強,適用于大質量火星車的轉移需求。布局方面,該機構充分利用進入艙背罩壁與火星車之間的狹小空間,縱向包絡小,適用于火星任務。
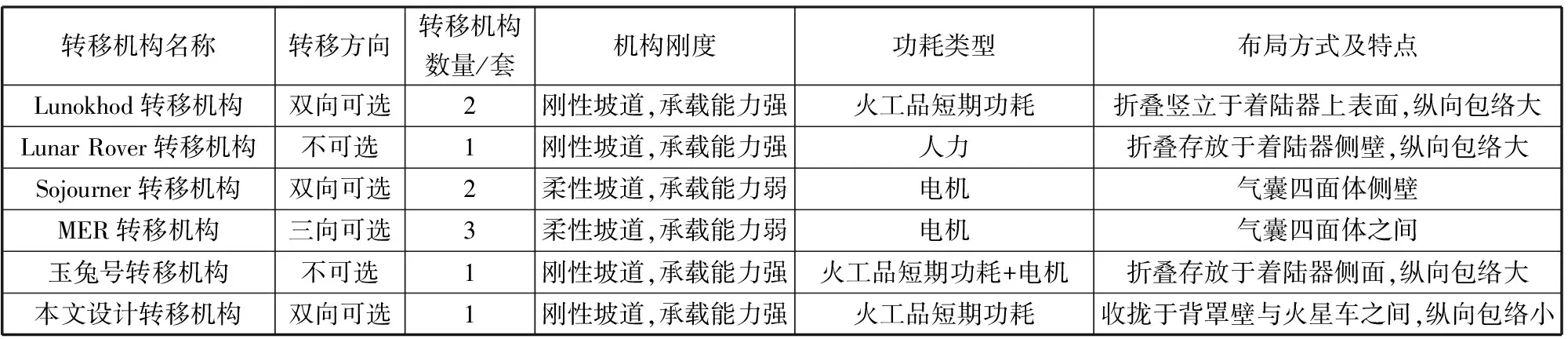
表1 轉移機構對比
2 坡道轉移姿態分析
2.1 坡道轉移姿態分析建模
坡道展開后,在火星車轉移過程中的最大坡道角及2條坡道因地形等因素形成的異面角,是影響火星車轉移安全性的2個關鍵指標。
為了便于分析著陸姿態,定義著陸器的坐標系(Oz-XzYzZz)及其相關著陸地形參數。坐標原點Oz:著陸平臺正方形上表面的角點;Xz軸:過坐標原點,以火星車轉移方向為正;Zz軸:過坐標原點,垂直于著陸器上表面,指向火星車為正;Yz軸:與Xz軸、Zz軸構成右手坐標系。將著陸器與火星著陸環境作為轉移機構設計的主要條件因素,著陸姿態及地形參數如圖6所示,其中設計參數及其物理意義如表2所示。
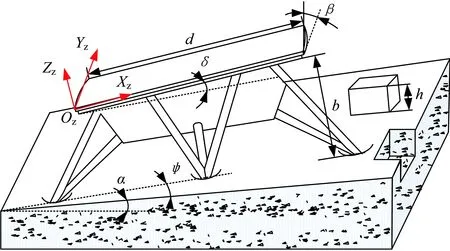
圖6 著陸姿態及地形參數Fig.6 Landing attitude and landform parameters
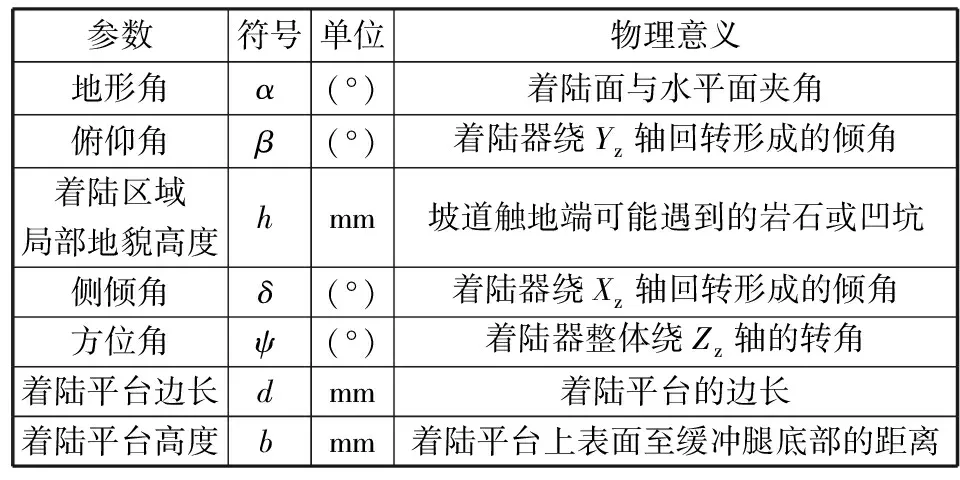
參數符號單位物理意義地形角α(°)著陸面與水平面夾角俯仰角β(°)著陸器繞Yz軸回轉形成的傾角著陸區域局部地貌高度hmm坡道觸地端可能遇到的巖石或凹坑側傾角δ(°)著陸器繞Xz軸回轉形成的傾角方位角ψ(°)著陸器整體繞Zz軸的轉角著陸平臺邊長dmm著陸平臺的邊長著陸平臺高度bmm著陸平臺上表面至緩沖腿底部的距離
建立著陸面坐標系(O-XYZ),Y軸沿坡道面向上,Z軸垂直坡道面向上,O點位于Oz正下方。圖7示出了著陸面坐標系及轉移機構構型相關參數,其定義如表3所示。
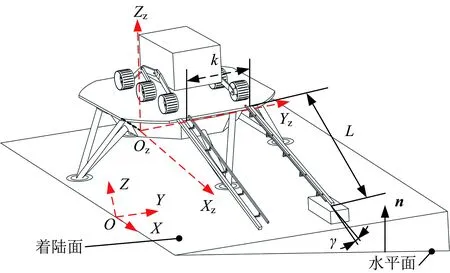
圖7 著陸面坐標系及參數
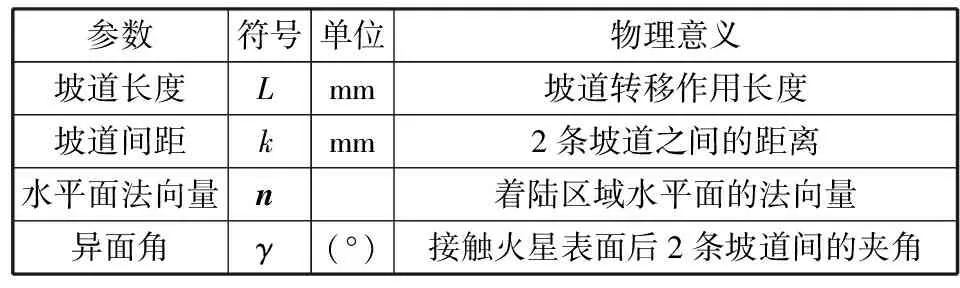
參數符號單位物理意義坡道長度Lmm坡道轉移作用長度坡道間距kmm2條坡道之間的距離水平面法向量n著陸區域水平面的法向量異面角γ(°)接觸火星表面后2條坡道間的夾角
在坐標系O-XYZ與坐標系Oz-XzYzZz中分析各參數間的關系,利用坐標變換統一轉換至坐標系O-XYZ,建立地形因素、坡道構型與轉移姿態的關系模型。因為著陸器存在俯仰時會降低著陸平臺的高度,進而會減小坡道角及異面角,因此不會對最惡劣著陸工況下的極限轉移姿態產生影響,可設俯仰角為0。
如圖8所示,點A,C分別為2條坡道與著陸平臺的連接點,點B,D分別為2條坡道在著陸區域局部地貌的落點。σ1,σ2分別表示2條坡道的局部地貌。點B是以A為圓心、以坡道長度為半徑的圓與局部地貌σ1的交點;點D是以C為圓心、以坡道長度為半徑的圓與局部地貌σ2的交點。火星車在坡道上移動時,各車輪與坡道接觸,以坡道上的點E,F代表火星車車輪位置。點E,F的取值范圍分別為E∈[C,D],F∈[A,B],該取值范圍涵蓋了火星車剛行駛到坡道至完全駛離坡道的全過程。火星車兩側的車輪在坡道上的位置相互組合,形成火星車轉移平面ABE及CDF,分別表示為πABE,πCDF。nABE,nCDF分別為火星車轉移平面πABE,πCDF的法向量。θABE,θCDF分別為nABE,nCDF與水平面法向量n的夾角,定義為坡道角。
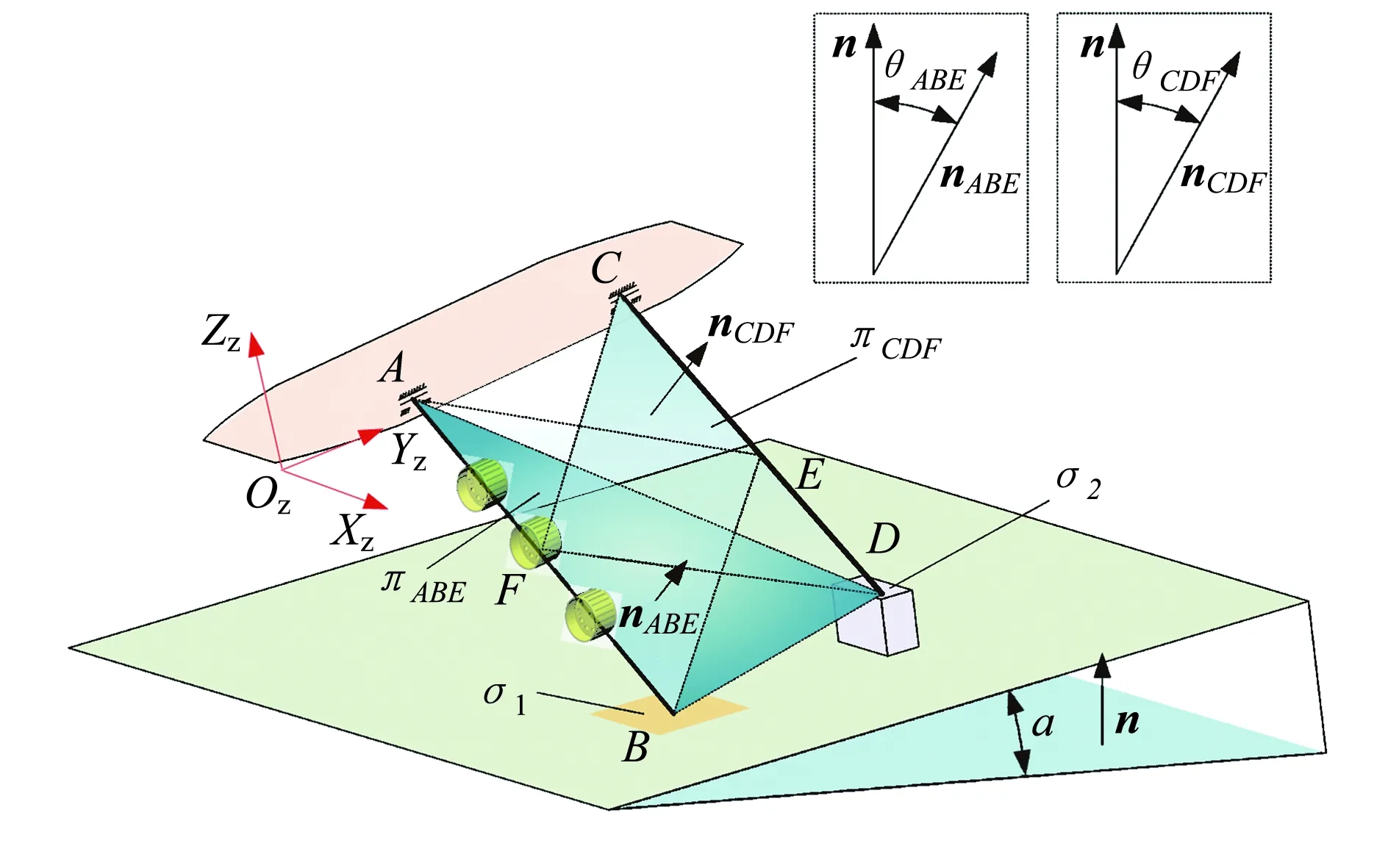
圖8 轉移姿態求解示意Fig.8 A schematic diagram for solving transfer attitude
由圖7及圖8的幾何關系可知,原點Oz與2條坡道落點處局部地貌σ1,σ2的距離t1,t2可分別表示為
(3)
式中:h1和h2分別為σ1和σ2的高度。
坐標系O-XYZ到坐標系Oz-XzYzZz的變換過程如圖9所示,中間經過坐標系O1-X1Y1Z1和O2-X2Y2Z2,坐標變換矩陣見式(4)。其中:坐標系O-XYZ繞Z軸旋轉角度ψ,變換為坐標系O1-X1Y1Z1;坐標系O1-X1Y1Z1沿Z1軸平移t,得到坐標系O2-X2Y2Z2;坐標系O2-X2Y2Z2再繞X2軸旋轉角度δ,即得到坐標系Oz-XzYzZz。
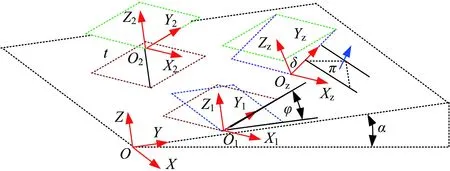
圖9 坐標變換過程Fig.9 Coordinate transformation process
(4)
利用式(4),可得到點A,B,C,D,E,F在坐標系O-XYZ中的坐標,以點A為例。
(5)
水平面法向量n在坐標系O-XYZ里表示為[0 -sinα-cosα]T。
AB方向矢量可表示為
SAB=(xB-xA)i+(yB-yA)j+(zB-zA)k
(6)
CD方向矢量可表示為
SCD=(xD-xC)i+(yD-yC)j+(zD-zC)k
(7)
式中:i,j,k表示坐標系O-XYZ的3個軸向標準矢量。
分別對火星車轉移平面πABE,πCDF的坡道角開展分析。
AE方向矢量可表示為
SAE=(xE-xA)i+(yE-yA)j+(zE-zA)k
(8)
則火星車轉移平面πABE的法向量為
nABE=SAE×SAB=
(9)
火星車轉移平面πABE的坡道角θABE最大值為
(10)
CF方向矢量可表示為
SCF=(xF-xC)i+(yF-yC)j+(zF-zC)k
(11)
則火星車轉移平面πCDF的法向量可表示為
nCDF=SCF×SCD=
(12)
火星車轉移平面πCDF的坡道角θCDF最大值為
(13)
取θABE,max和θCDF,max的最大值,即可得到火星車在坡道轉移過程中的最大坡道角θmax。
θmax=max (θABE,max,θCDF,max)
(14)
將坡道展開后視為空間矢量,則坡道異面角γ為2條坡道展開后的異面直線夾角,計算如下
(15)
通過上述分析,即獲得了坡道角及異面角的數學模型。
2.2 最小坡道長度分析結果
火星車坡道坡道過長,剛度難以保證,且超出設計約束范圍;坡道過短,坡道角過大,不利于火星車安全轉移。因此,需要分析得到滿足火星車轉移姿態要求的最小坡道長度。
根據建立的模型可知,影響火星車轉移姿態異面角γ和坡道角θ的主要因素,有地形角α和局部地貌高度h、著陸器的側傾角δ、方位角ψ和坡道長度L。初步確定坡道長度L的取值在1500~5000 mm,令方位角從-180°到180°變化,得到各個地形、各著陸姿態下不同坡道長度對應的轉移姿態,如圖10所示。得到異面角γ與方位角ψ及坡道長度L的關系如圖11所示。結果表明:方位角ψ不影響異面角γ,即異面角γ的大小與著陸器方位角ψ無關。得到坡道角θ與方位角ψ及坡道長度L的關系,如圖12所示,θ在固定坡道長度下隨方位角作正弦變化。
在展開方向可選的前提下,當火星表面存在一定坡度,且轉移機構與橫坡方向平行展開時,由于對稱性設計,坡道在火星車前、后展開時的坡道角θ及異面角γ相同。以坡道角θ不大于30°、異面角γ不大于8°作為設計目標,得到5種局部地貌下轉移姿態與坡道長度L的關系,如圖13所示,由此可以得到各工況下所需的最小坡道長度。
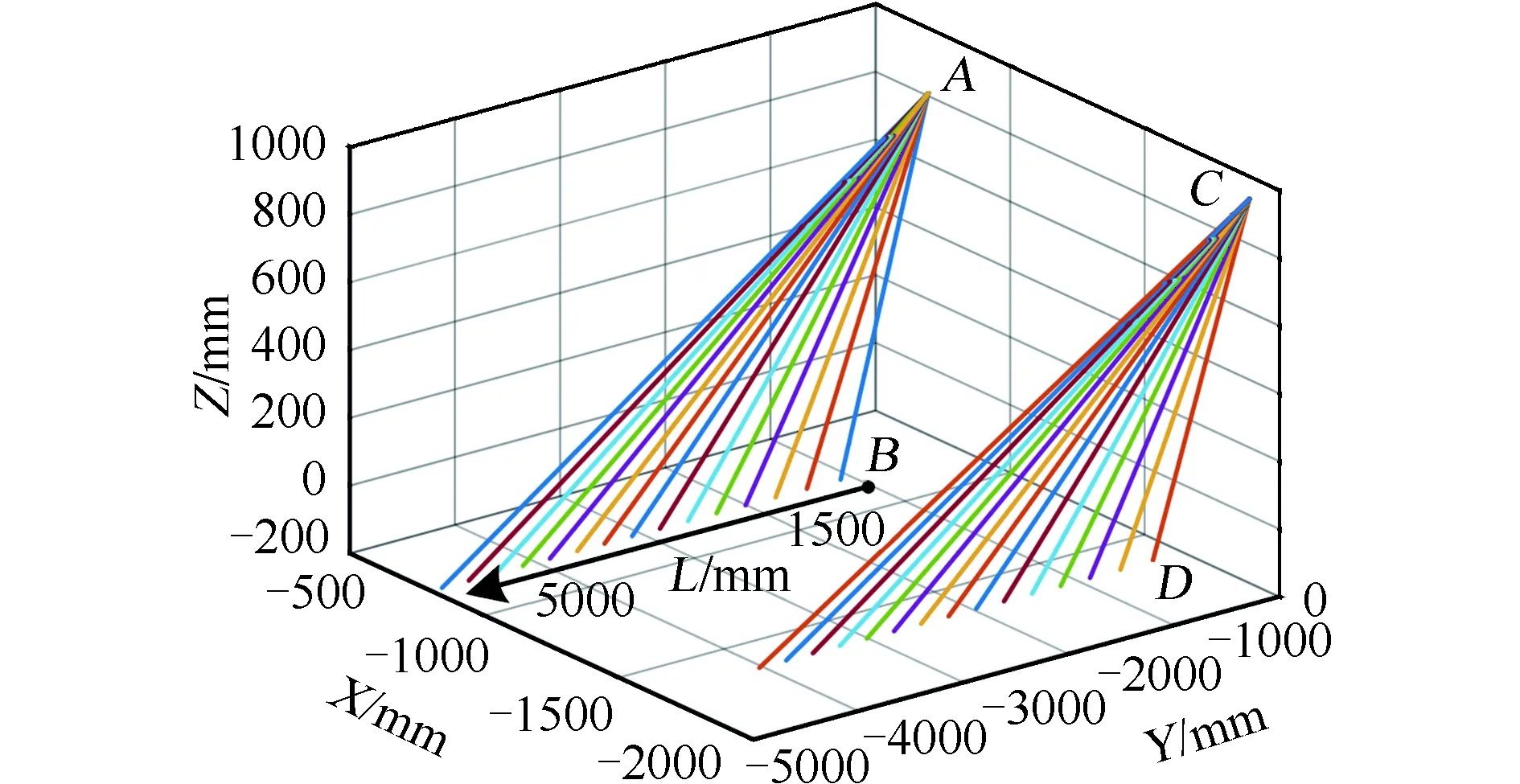
圖10 坐標系O-XYZ下各坡道長度對應的姿態Fig.10 Attitude corresponding to ramp length in coordinate system O-XYZ
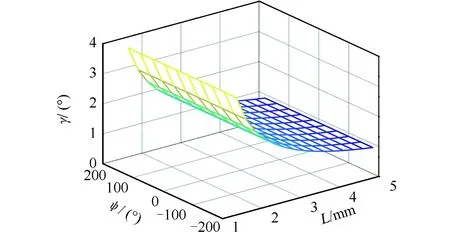
圖11 異面角γ與方位角ψ及坡道長度L的關系Fig.11 Relationship between facet angle γ and azimuth angle ψ with ramp length L
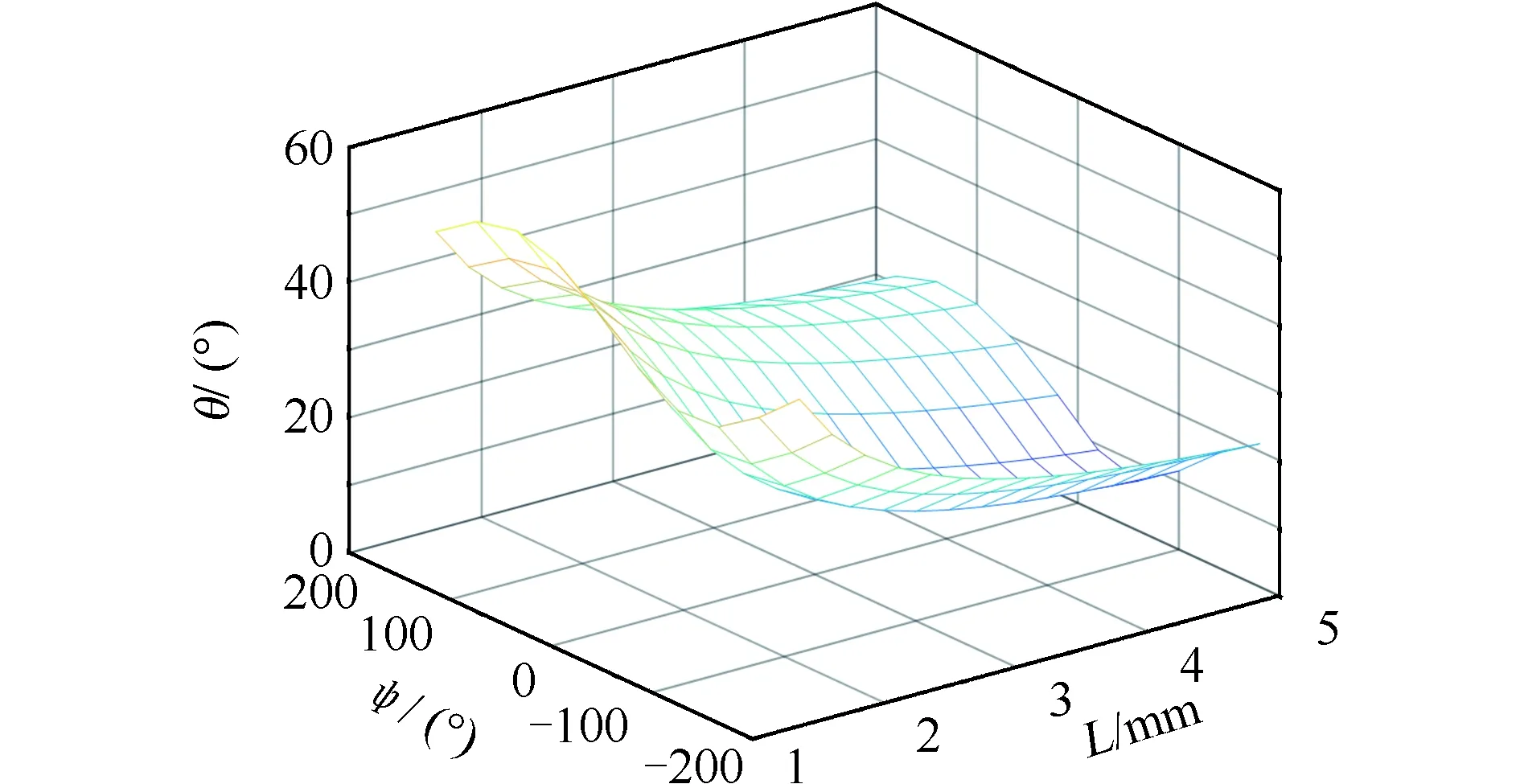
圖12 坡道角θ與方位角ψ及坡道長度L的關系Fig.12 Relationship between ramp angle θ and azimuth angle ψ with ramp length L
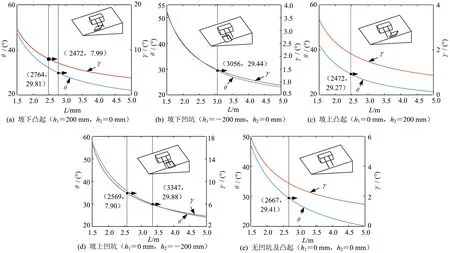
圖13 各局部地貌下坡道轉移姿態與坡道長度的關系Fig.13 Relationship between transfer attitude and ramp length under different topographic features
圖13中,h正值表示火星表面凸起物,負值表示火星表面凹坑。分析結果表明,最小坡道長度需求為3347 mm。值得注意的是,上述坡道角θ及異面角γ指標均為假定值,若在確定的角度指標要求下,分析得到最小坡道長度超出了進入艙布局所允許的坡道長度最大值,即表明已有的進入艙外形、火星車外形包絡等初始條件需要適當調整,以保證火星車轉移坡道角θ及異面角γ的指標要求。
3 結束語
本文針對著陸器著陸后火星車從一定高度轉移至火星表面的需求,結合著陸系統整體構型,設計了一種雙向可選展開的坡道式轉移機構。該轉移機構展開后長度大,包絡空間適應性好,具備輕量化特點,適用于“著陸+巡視”的地外天體探測任務。針對轉移機構的幾何特征,建立了地形參數和轉移姿態之間的數學模型。利用該數學模型,分析了各種工況下的火星車轉移姿態。結果表明:坡道角隨著陸后的方位角呈正弦變化,而異面角與著陸后的方位角無關,在此基礎上確定了滿足火星車安全轉移要求的最小坡道長度。上述設計及分析可為火星轉移機構設計提供參考。
參考文獻(References)
[1] 韓鴻碩,陳杰.21世紀國外深空探測發展計劃及進展[J].航天器工程,2008,17(3):1-22
Han Hongshuo,Chen Jie. 21st century foreign deep space exploration development plans and their progresses [J]. Spacecraft Engineering, 2008, 17(3): 1-22 (in Chinese)
[2] 韓鴻碩,王一然,蔣宇平,等.國外深空探測器著陸緩沖系統的特點和應用[J].航天器工程,2012,21(6):7-24
Han Hongshuo, Wang Yiran, Jiang Yuping, et al. Characteristics and application of deep-space explorer landing impact attenuation system [J]. Spacecraft Engineering, 2012, 21(6): 7-24 (in Chinese)
[3] 彭玉明,李爽,滿益云,等.火星進入、下降與著陸技術的新進展——以“火星科學實驗室”為例[J].航天返回與遙感,2010,31(4):7-14
Peng Yuming, Li Shuang, Man Yiyun, et al. New progress of Mars entry, descent and landing technologies-Mars Science Laboratory case study [J]. Spacecraft Recovery & Remote Sensing, 2010, 31(4): 7-14 (in Chinese)
[4] 褚桂柏,張熇.月球探測器技術[M].北京:中國科學技術出版社,2007:38-50
Chu Guibai, Zhang He. Lunar explorer technology[M]. Beijing: China Science and Technology Press, 2007: 38-50 (in Chinese)
[5] 饒瑋,孫澤州,孟林智,等.火星著陸探測任務關鍵環節技術途徑分析[J].深空探測學報,2016,3(2):121-128
Rao Wei, Sun Zezhou, Meng Linzhi, et al. Analysis and design for the Mars entry, descent and landing mission [J]. Journal of Deep Space Exploration, 2016, 3(2): 121-128 (in Chinese)
[6] Basilevsky A T, Linkin V M. Lunar rover sample return: Lunokhod/Luna heritage and perspectives [J]. Advances in Space Research, 1996, 18(11): 83-89
[7] Tibor B. Summary of Russian planetary lander missions [EB/OL]. (2002-10-19). [2018-04-10]. http:∥www.lpi.USra.edu/vexag/russian_plan_miss.pdf
[8] Donahue B B, Fowler C R. Lunar lander configuration study and parametric performance analysis [C]//Proceedings of the 29th Joint Propulsion Conference and Exhibit Monterey. Washington D.C.:AIAA,1993:19-38
[9] D Cadogan, C Sandy, M Grahne. Development and evaluation of the Mars Pathfinder inflatable airbag landing system [J]. Acta Astronautica, 2002, 50(10): 633-640
[10] Price H, Cramer K, Doudrlck S, et al. Mars Sample Return spacecraft systems architecture [C]∥Proceedings of Aerospace Conference, 2000 IEEE. New York: IEEE, 2000: 357-375
[11] 朱仁璋,王鴻芳,泉浩芳,等.美國火星表面探測使命述評(上)[J].航天器工程,2010,19(2):17-33
Zhu Renzhang, Wang Hongfang, Quan Haofang, et al. Overview of the US Mars Surface Missions (part one) [J]. Spacecraft Engineering, 2010, 19(2): 17-33 (in Chinese)
[12] 朱仁璋,王鴻芳,泉浩芳,等.美國火星表面探測使命述評(下)[J].航天器工程,2010,19(3):7-27
Zhu Renzhang, Wang Hongfang, Quan Haofang, et al. Overview of the US Mars Surface Missions (part two) [J]. Spacecraft Engineering, 2010, 19(3): 7-27 (in Chinese)
[13] Gianfranco Visentin, Michel van Winnendael. Robotics options for low-cost planetary missions [J]. Acta Astronautica, 2006, 59(8/9/10/11): 750-756
[14] G F Mendeck, P D Burkhart, A M S Martin, et al. Mars Science Laboratory: entry, descent, and landing system performance [C]//Proceedings of Aerospace Conference, 2007 IEEE. New York: IEEE,2007: 1-18
[15] Steltzner A, Kipp D, Chen A, et al. The Mars Science Laboratory entry, descent, and landing system [J]. Journal of Spacecraft and Rockets, 2014, 51(4): 993
[16] Devin Kipp, Miguel San Martin, John Essmiller, et al. Mars Science Laboratory entry, descent, and landing triggers [C]//Proceedings of Aerospace Conference, 2007 IEEE. New York: IEEE,2007: 1-10
[17] 李奎,劉榮強,姜生元,等.具有月面適應性的月球車著陸釋放機構[J].西安交通大學學報,2011,45(9):28-33
Li Kui, Liu Rongqiang, Jiang Shengyuan, et al. Rover landing unloading mechanism with lunar surface adaptability [J]. Journal of Xi’an Jiaotong University, 2011, 45(9): 28-33 (in Chinese)
[18] Edquist K T, Wright M J. Viking after body heating computations and comparisons to flight data, AIAA 2006-386 [R]. Washington D.C.: AIAA, 2006
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
