自動(dòng)移栽機(jī)整排取苗間隔投苗控制系統(tǒng)設(shè)計(jì)與試驗(yàn)
2018-07-05 11:38:12胡建平楊麗紅韓綠化毛罕平張思偉
農(nóng)業(yè)機(jī)械學(xué)報(bào) 2018年6期
關(guān)鍵詞:設(shè)計(jì)
胡建平 常 航 楊麗紅 韓綠化 毛罕平 張思偉
(1.江蘇大學(xué)現(xiàn)代農(nóng)業(yè)裝備與技術(shù)教育部重點(diǎn)實(shí)驗(yàn)室, 鎮(zhèn)江 212013; 2.江蘇省農(nóng)業(yè)裝備與智能化高技術(shù)研究重點(diǎn)實(shí)驗(yàn)室, 鎮(zhèn)江 212013)
0 引言
蔬菜穴盤(pán)缽苗移栽技術(shù)因具有諸多優(yōu)勢(shì)而受到廣泛推廣,但我國(guó)現(xiàn)階段主要以半自動(dòng)化移栽機(jī)械為主,需人工完成取苗、投苗過(guò)程,不僅耗費(fèi)勞動(dòng)力,而且人工作業(yè)存在速度有限、易疲勞的缺點(diǎn),制約了移栽效率的提高[1]。因此實(shí)現(xiàn)取、投自動(dòng)化是推動(dòng)半自動(dòng)移栽機(jī)械向全自動(dòng)化方向發(fā)展的重要環(huán)節(jié)。目前我國(guó)現(xiàn)有的全自動(dòng)移栽機(jī)采用的取投方式主要為頂桿頂出式[2]、插入夾取式[3~5]和頂出夾取式[6~9]。
韓長(zhǎng)杰等[8]設(shè)計(jì)的穴盤(pán)苗移栽機(jī)自動(dòng)取喂系統(tǒng)中采用翻轉(zhuǎn)擺位式取苗機(jī)械手實(shí)現(xiàn)缽苗的取投,依靠翻轉(zhuǎn)氣缸和擺位氣缸控制機(jī)械手實(shí)現(xiàn)取苗位和投苗位的姿態(tài)變換,扎放苗氣缸控制柔性取苗針的伸縮完成苗的整排夾取、整排投放動(dòng)作,由間歇運(yùn)動(dòng)式苗杯接苗,該控制系統(tǒng)簡(jiǎn)單、易于實(shí)現(xiàn),缺點(diǎn)是氣缸控制取苗位與投苗位姿態(tài)轉(zhuǎn)換過(guò)程缺少控制,取苗精準(zhǔn)度難以保證。吳儉敏等[9]設(shè)計(jì)的蔬菜移栽穴盤(pán)苗自動(dòng)輸送裝置,運(yùn)用曲柄連桿式頂苗機(jī)構(gòu)將苗缽頂出后,夾苗裝置翻轉(zhuǎn)夾苗,該裝置由凸輪與齒輪齒條合成機(jī)構(gòu)控制夾苗爪的往復(fù)翻轉(zhuǎn),開(kāi)合凸輪控制夾苗爪的開(kāi)合,而上述取投控制采用純機(jī)械控制,因此機(jī)構(gòu)相對(duì)復(fù)雜,動(dòng)力需依靠單獨(dú)傳動(dòng)系統(tǒng)輸送,對(duì)控制精度的影響還有待進(jìn)一步驗(yàn)證。魏新華等[10]研制的穴盤(pán)苗全自動(dòng)移栽機(jī)運(yùn)動(dòng)協(xié)調(diào)控制系統(tǒng)采用伺服電動(dòng)機(jī)驅(qū)動(dòng)直線(xiàn)模組控制取苗機(jī)械手在取、放苗位置之間做縱向往復(fù)運(yùn)動(dòng),氣動(dòng)部件的驅(qū)動(dòng)完成取放苗動(dòng)作,缽苗直接由苗爪投入導(dǎo)苗筒后落入栽植器,每個(gè)苗爪可單獨(dú)完成取、放苗動(dòng)作,無(wú)需分苗環(huán)節(jié),但單個(gè)取苗機(jī)械手無(wú)法達(dá)到快速取苗要求。嚴(yán)宵月等[11]設(shè)計(jì)的整排取苗間隔投苗裝置,運(yùn)用6個(gè)凸輪控制6個(gè)取苗爪落苗時(shí)序,結(jié)構(gòu)簡(jiǎn)單,但機(jī)械控制調(diào)整不方便,對(duì)不同穴孔數(shù)的穴盤(pán)苗需要不同結(jié)構(gòu)的凸輪控制,并且凸輪輪廓磨損后影響取苗、投苗精度。
綜上所述,移箱、取苗、投苗和分苗是自動(dòng)移載機(jī)的關(guān)鍵技術(shù),本文在嚴(yán)宵月等[11]設(shè)計(jì)的純機(jī)械式控制整排取苗、間隔投苗基礎(chǔ)上,設(shè)計(jì)一種門(mén)型整排取投苗裝置,并結(jié)合機(jī)、電、氣控制技術(shù)設(shè)計(jì)一種整排取苗間隔投苗控制系統(tǒng),該系統(tǒng)通過(guò)與移箱機(jī)構(gòu)、旋轉(zhuǎn)分苗機(jī)構(gòu)的運(yùn)動(dòng)協(xié)調(diào)配合,實(shí)現(xiàn)自動(dòng)取苗、投苗和分苗運(yùn)動(dòng)。
1 取苗投苗系統(tǒng)結(jié)構(gòu)與控制原理
1.1 取苗投苗系統(tǒng)結(jié)構(gòu)組成
取苗投苗系統(tǒng)包括門(mén)型取苗機(jī)構(gòu)、取苗末端執(zhí)行器、移箱機(jī)構(gòu)、旋轉(zhuǎn)分苗機(jī)構(gòu)及控制系統(tǒng),如圖1所示。

圖1 取苗投苗系統(tǒng)結(jié)構(gòu)示意圖Fig.1 Structure diagram of picking and casting system1.移箱機(jī)構(gòu) 2.滑槽側(cè)板 3.翻轉(zhuǎn)門(mén)架 4.取苗爪 5.取苗爪安裝板 6.分苗杯架 7.鏈傳動(dòng)裝置 8.分苗杯 9.安裝機(jī)架 10.分苗機(jī)構(gòu)驅(qū)動(dòng)鏈
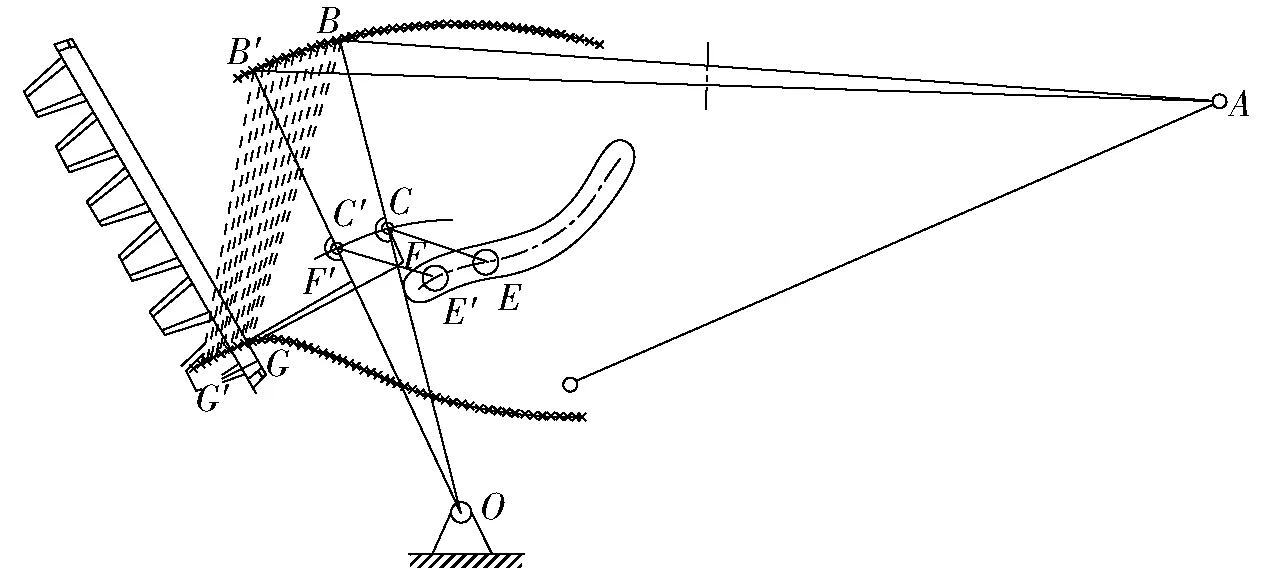
圖2 取苗機(jī)構(gòu)運(yùn)動(dòng)簡(jiǎn)圖Fig.2 Trajectory diagram of picking mechanism
門(mén)型取苗機(jī)構(gòu)主要由滑槽側(cè)板、翻轉(zhuǎn)門(mén)架(含翻轉(zhuǎn)機(jī)構(gòu)),取苗爪安裝板、翻轉(zhuǎn)氣缸以及取苗爪組成,其機(jī)構(gòu)運(yùn)動(dòng)簡(jiǎn)圖如圖2所示。取苗機(jī)構(gòu)[12-13]中的翻轉(zhuǎn)過(guò)程依靠雙作用氣缸AB來(lái)驅(qū)動(dòng),氣缸AB一端A與滑槽側(cè)板固定架轉(zhuǎn)動(dòng)副連接,另一端B與翻轉(zhuǎn)門(mén)架桿OB轉(zhuǎn)動(dòng)副連接,氣缸AB伸縮帶動(dòng)門(mén)架桿OB擺動(dòng),同時(shí)連桿CE一端軸承E在滑槽內(nèi)滑動(dòng),兩者復(fù)合運(yùn)動(dòng)形成取苗軌跡,最終取苗機(jī)構(gòu)驅(qū)動(dòng)連桿CE上的取苗爪FG沿取苗軌跡做取苗、移苗運(yùn)動(dòng)。運(yùn)用Pro/E軟件對(duì)取苗機(jī)構(gòu)進(jìn)行運(yùn)動(dòng)仿真分析,拾取取苗爪爪針末端點(diǎn)得到其運(yùn)動(dòng)軌跡線(xiàn)即為取苗機(jī)構(gòu)取苗軌跡,運(yùn)動(dòng)軌跡末端有一段直線(xiàn)GG′即為取苗爪垂直穴盤(pán)插入缽體取苗的位移。
為了控制取苗爪的開(kāi)合和推苗動(dòng)作,氣缸AB上安裝3個(gè)取苗狀態(tài)行程開(kāi)關(guān)I1、I2、I3,其中行程開(kāi)關(guān)I1、I3分別安裝在氣缸伸縮兩端極限位置,行程開(kāi)關(guān)I2位置根據(jù)取苗爪垂直插入穴盤(pán)的行程來(lái)確定,由圖2分析可知,當(dāng)取苗爪插入穴盤(pán)取苗行程為GG′時(shí),對(duì)應(yīng)氣缸伸出量為AB′長(zhǎng)度減去AB的長(zhǎng)度,由此可確定磁性開(kāi)關(guān)I2的安裝位置。
分苗機(jī)構(gòu)主要由分苗杯架、鏈傳動(dòng)裝置、分苗杯組成,分苗杯固定于帶耳鏈條上,完成接苗、帶苗、落苗功能[14];工作時(shí)底盤(pán)動(dòng)力經(jīng)由分動(dòng)箱輸送給分苗機(jī)構(gòu)與栽植機(jī)構(gòu),兩者傳動(dòng)比為
(1)
式中n1——分苗杯轉(zhuǎn)速n2——栽植器轉(zhuǎn)速
a——單行栽植鴨嘴個(gè)數(shù)
z——分苗杯傳動(dòng)鏈輪齒數(shù)
b——苗杯對(duì)應(yīng)供給的栽植行數(shù)
分苗杯隨底盤(pán)前進(jìn)做連續(xù)旋轉(zhuǎn)運(yùn)動(dòng),門(mén)型取苗機(jī)構(gòu)翻轉(zhuǎn)門(mén)架以?xún)蓚?cè)壁底端連接點(diǎn)為圓心做圓弧擺動(dòng),與此同時(shí)取苗爪安裝板由于其一側(cè)連接的銷(xiāo)軸上的軸承沿滑槽滾轉(zhuǎn)運(yùn)動(dòng),使取苗爪能沿垂直插入傾斜60°的穴盤(pán)取苗[15]。
1.2 取苗投苗控制原理
根據(jù)取苗投苗機(jī)械系統(tǒng)工作原理,基于PLC控制器設(shè)計(jì)取苗投苗控制系統(tǒng)[13,15-18],取苗、投苗動(dòng)作采用氣動(dòng)控制方式,取苗、投苗、分苗協(xié)調(diào)控制通過(guò)苗盤(pán)到位傳感器、取苗狀態(tài)行程開(kāi)關(guān)I1、I2、I3、分苗杯到位傳感器、增量式編碼器、電磁閥等控制元件來(lái)實(shí)現(xiàn),圖3為控制系統(tǒng)電路圖。

圖3 取苗投苗控制系統(tǒng)電路Fig.3 Control system electrical schematic diagram of picking and casting system
自動(dòng)移栽機(jī)工作時(shí),通過(guò)檢測(cè)翻轉(zhuǎn)氣缸的行程位置來(lái)獲取取苗機(jī)構(gòu)所處狀態(tài):翻轉(zhuǎn)取苗、夾苗、帶苗返回。每個(gè)取苗爪開(kāi)合驅(qū)動(dòng)氣缸均由單獨(dú)電磁閥控制[13],既可整投整取,也可針對(duì)于非間歇運(yùn)動(dòng)的分苗機(jī)構(gòu)實(shí)現(xiàn)有序間隔投苗,并依據(jù)分苗杯速度自動(dòng)調(diào)整投苗時(shí)間點(diǎn)。每個(gè)苗爪投苗位置點(diǎn)由分苗杯傳感器與增量式編碼器控制,分苗杯傳感器采用漫反射式光電傳感器,安裝在機(jī)架上,當(dāng)分苗杯運(yùn)動(dòng)到傳感器位置時(shí),接收到反射光信號(hào)而產(chǎn)生高電壓,從而實(shí)現(xiàn)分苗杯定位以及對(duì)走過(guò)苗杯進(jìn)行計(jì)數(shù)的功能;增量式編碼器安裝在分苗杯傳動(dòng)鏈輪軸上,可實(shí)時(shí)監(jiān)測(cè)分苗鏈輪轉(zhuǎn)動(dòng)速率,獲取分苗杯運(yùn)動(dòng)參數(shù)(包括速度、位移)。分苗杯傳感器檢測(cè)苗杯到特定位置后,編碼器產(chǎn)生信號(hào)開(kāi)始清零計(jì)數(shù),計(jì)數(shù)值相當(dāng)于分苗杯位移,當(dāng)分苗杯移動(dòng)量達(dá)到設(shè)定值時(shí),取苗爪上的直線(xiàn)氣缸伸出推動(dòng)取苗爪投苗。
2 整排邊插邊夾取苗控制

圖4 取苗控制流程圖Fig.4 Flow chart of picking control system
整排取苗控制流程圖如圖4所示,當(dāng)苗盤(pán)到位后,翻轉(zhuǎn)氣缸伸出推動(dòng)取苗爪翻轉(zhuǎn)取苗,此過(guò)程中,當(dāng)取苗爪翻轉(zhuǎn)至爪針剛接觸缽苗時(shí)磁性開(kāi)關(guān)I2產(chǎn)生信號(hào),執(zhí)行夾苗指令,開(kāi)合驅(qū)動(dòng)氣缸收縮,并在苗爪繼續(xù)插入缽體過(guò)程中苗爪收縮完畢,夾取完成后磁性開(kāi)關(guān)I3產(chǎn)生信號(hào),翻轉(zhuǎn)氣缸縮回,苗爪沿原軌跡將缽苗拔出帶至豎直位置,磁性開(kāi)關(guān)I1產(chǎn)生信號(hào)后執(zhí)行投苗指令[16]。
3 整排有序投苗控制
3.1 投苗位置點(diǎn)對(duì)應(yīng)編碼計(jì)數(shù)值計(jì)算
嚴(yán)宵月等[11]設(shè)計(jì)的間隔投苗方法是通過(guò)計(jì)算取苗爪逐個(gè)推后時(shí)間tn,并以此為依據(jù)設(shè)計(jì)安裝凸輪控制投苗時(shí)間點(diǎn)。該投苗控制方式的缺點(diǎn)是由凸輪控制的取苗爪逐個(gè)推后投苗時(shí)間一致、不變,所要求的分苗杯旋轉(zhuǎn)速度也必須保持恒定,這對(duì)實(shí)際作業(yè)的移栽機(jī)來(lái)說(shuō)很難保證。本文設(shè)計(jì)的有序投苗控制系統(tǒng),以投苗位置量為恒定值,投苗推遲時(shí)間點(diǎn)隨速度變化而變化[16]。
如圖5所示,當(dāng)光電傳感器I4檢測(cè)到分苗杯杯棱,此時(shí)第1個(gè)投苗杯的投苗點(diǎn)與第1個(gè)取苗爪之間距離為a1,第2個(gè)投苗杯的投苗點(diǎn)與第2個(gè)取苗爪之間距離為a2;且a2+d1=a1+d2。由上可知a1、a2關(guān)系式a2=a1+Δd(Δd=d2-d1),同理可得a3=a1+2Δd、a4=a1+3Δd…an=a1+(n-1)Δd。因此,在分苗杯向右移動(dòng)過(guò)程中,當(dāng)?shù)?個(gè)苗杯走過(guò)距離a1時(shí),第1個(gè)苗爪投苗,第2個(gè)苗杯走過(guò)距離a2時(shí),第2個(gè)苗爪投苗,以此類(lèi)推至最后一個(gè)苗爪投苗。
分苗杯走過(guò)距離運(yùn)用編碼器檢測(cè),編碼器與分苗杯通過(guò)傳動(dòng)系統(tǒng)聯(lián)動(dòng),分苗杯移動(dòng)一定距離編碼轉(zhuǎn)動(dòng)對(duì)應(yīng)的角度,產(chǎn)生的信號(hào)由高速計(jì)數(shù)器C620采用雙向計(jì)數(shù)法記入[19],流程如圖6所示。
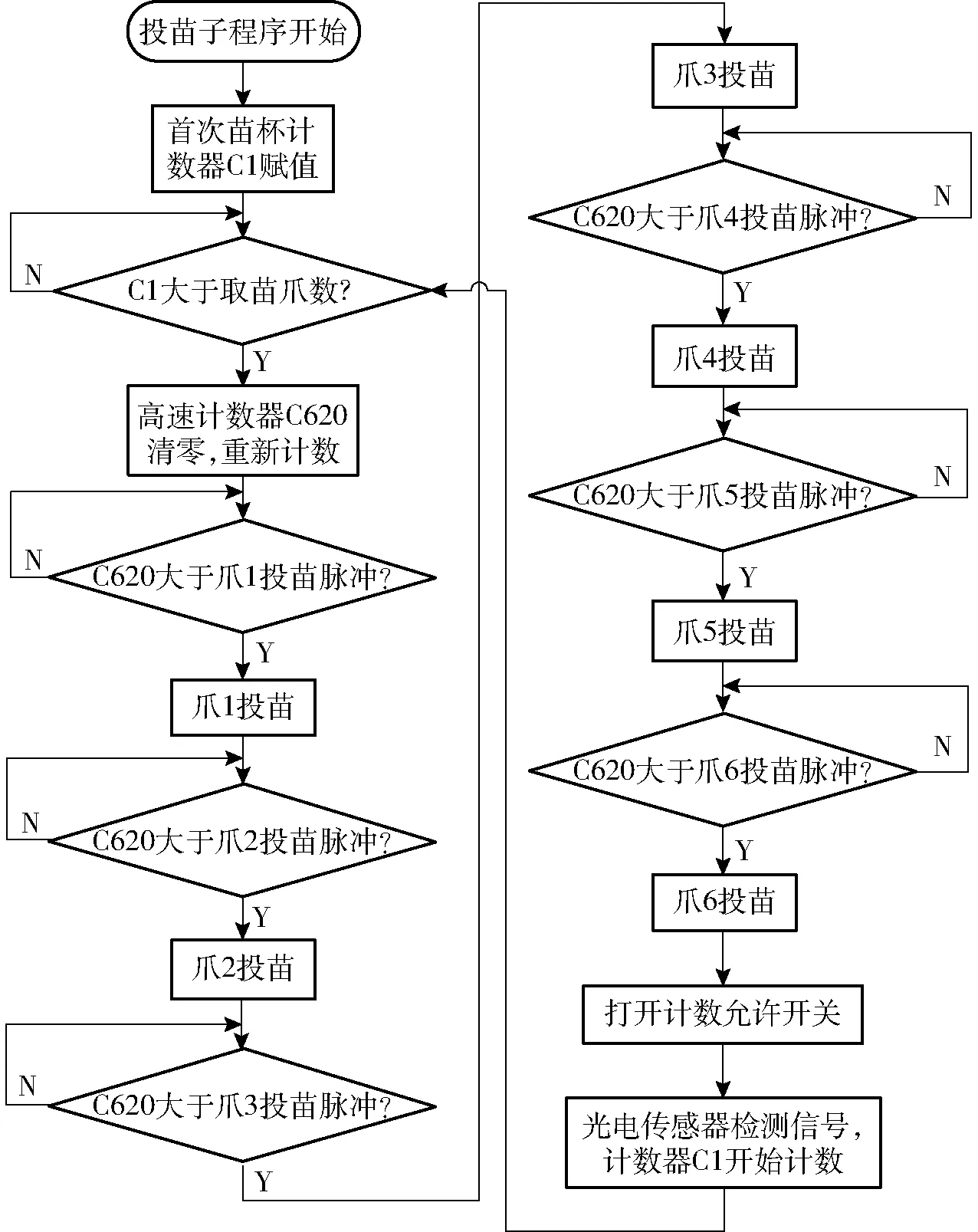
圖6 投苗控制流程圖Fig.6 Flow chart of casting control system
本文中編碼器通過(guò)同步帶與栽植機(jī)構(gòu)減速器連接,兩者傳動(dòng)比為i1,栽植機(jī)構(gòu)與分苗杯減速器傳動(dòng)比為i0,則
(2)
式中n3——編碼器轉(zhuǎn)速
設(shè)分苗杯每運(yùn)動(dòng)1 mm高數(shù)計(jì)數(shù)器產(chǎn)生的脈沖信號(hào)計(jì)數(shù)量為C,簡(jiǎn)稱(chēng)為毫米脈沖量;又設(shè)分苗杯鏈輪轉(zhuǎn)i1i0圈,對(duì)應(yīng)編碼器轉(zhuǎn)1圈,由此推出毫米脈沖量C的計(jì)算公式為
(3)
式中p——鏈條節(jié)距
N——編碼器轉(zhuǎn)一圈產(chǎn)生脈沖數(shù)
將毫米脈沖量C乘以取苗爪對(duì)應(yīng)投苗距離就得到取苗爪投苗脈沖數(shù)
fn=C[a1+d3+(n-1)Δd]
(4)
3.2 不同栽植頻率下投苗點(diǎn)的設(shè)定
為保證苗缽在下落到分苗杯內(nèi)時(shí),不碰到杯壁,選取缽苗一半高度落入杯中,其中心線(xiàn)與杯中心線(xiàn)重合時(shí)為最佳投苗狀態(tài)。又缽苗下落過(guò)程中,分苗杯仍繼續(xù)運(yùn)動(dòng),因此為保證苗缽處于最佳投苗狀態(tài),同一取苗爪在不同栽植頻率下,其第1個(gè)投苗位置距離a1值需不同,a1值與推苗時(shí)間t1、缽苗脫離下落時(shí)間t2有關(guān)[16]。
若將缽苗下落時(shí)間t2內(nèi)的自由落體運(yùn)動(dòng)與分苗杯勻速橫向移動(dòng)復(fù)合為苗缽的拋物線(xiàn)運(yùn)動(dòng),則取苗爪末端與分苗杯杯口的高度為

(5)
式中v0——?dú)飧淄泼缢俣?/p>
分苗杯在時(shí)間t1+t2內(nèi)的橫向移動(dòng)距離
x=vm(t1+t2)
(6)
式中vm——分苗杯橫向移動(dòng)速度
設(shè)高度H為50 mm、氣缸推苗速度v0為0.54 m/s,移栽機(jī)栽植頻率為40~70 株/min,根據(jù)栽植頻率與苗杯配合關(guān)系,計(jì)算得到不同栽植頻率下對(duì)應(yīng)分苗杯橫向速度vm以及第1個(gè)接苗分苗杯橫向移動(dòng)距離x,如表1所示。
由表1可知,栽植頻率從40株/min增加到70株/min時(shí),對(duì)應(yīng)橫向移動(dòng)距離差為12.45 mm,栽植頻率每增加5株,對(duì)應(yīng)偏移Δx約為2 mm。
以栽植頻率60株/min為基準(zhǔn),計(jì)算出最佳投苗狀態(tài)下的投苗位置點(diǎn)距離a1為55 mm,栽植頻率為50株/min時(shí),最佳投苗狀態(tài)下的投苗位置點(diǎn)距離a1為53 mm,依次類(lèi)推。將a1代入式(4),分別計(jì)算出72孔穴盤(pán)與128孔穴盤(pán)、不同栽植頻率下首個(gè)取苗爪對(duì)應(yīng)最佳投苗位置的脈沖計(jì)數(shù)f1,如表2所示。在對(duì)應(yīng)栽植頻率下,當(dāng)編碼器計(jì)數(shù)達(dá)到其投苗脈沖值時(shí),取苗爪投苗。

表2 不同栽植頻率下初始投苗脈沖計(jì)數(shù)f1Tab.2 Inceptive impulse of casting in different planting frequencies
4 取苗投苗試驗(yàn)
4.1 試驗(yàn)條件
2017年4月15日,在江蘇大學(xué)現(xiàn)代農(nóng)業(yè)裝備與技術(shù)省部共建教育部重點(diǎn)實(shí)驗(yàn)室試驗(yàn)地進(jìn)行取投苗控制系統(tǒng)性能試驗(yàn),如圖7所示。試驗(yàn)苗為津研七號(hào)黃瓜苗,如圖8所示,育苗盤(pán)選用72孔和128孔兩種標(biāo)準(zhǔn)穴盤(pán),育苗苗齡20 d,平均苗高為92.4 mm。

圖7 取苗投苗性能試驗(yàn)Fig.7 Performance experiment photo of picking and casting

圖8 試驗(yàn)用穴盤(pán)苗Fig.8 Tray and seedlings for experiment
4.2 試驗(yàn)指標(biāo)與結(jié)果分析
4.2.1試驗(yàn)指標(biāo)
依據(jù)取苗工作循環(huán)動(dòng)作流程,將取苗失敗率S1、投苗失敗率S2、取投苗綜合成功率S作為試驗(yàn)評(píng)價(jià)指標(biāo)[20]。計(jì)算公式為
(7)
(8)
S=(1-S1-S2)×100%
(9)
式中N0——取苗總數(shù)
N1——取苗末端執(zhí)行器未夾出缽苗的數(shù)目
N2——被取苗末端執(zhí)行器夾出的缽苗未能成功投苗的個(gè)數(shù)
4.2.2試驗(yàn)結(jié)果分析
由試驗(yàn)結(jié)果(表3)可知,在栽植頻率40~70株/min范圍內(nèi),72、128孔穴盤(pán)苗的取苗投苗綜合成功率均高于95%,總平均值為97.98%。當(dāng)栽植頻率在40株/min時(shí),兩種穴盤(pán)苗的取投苗綜合成功率為99.31%和99.22%,當(dāng)栽植頻率提升至70 r/min時(shí),取投苗綜合成功率為95.15%和96.88%,總體上,隨著栽植頻率的提高,取苗失敗率、投苗失敗率均有所提高,而取苗投苗綜合成功率有所下降,造成這一現(xiàn)象的主要原因是:隨著栽植頻率的提升,完成單次取苗工作的時(shí)間越來(lái)越短,取苗時(shí)間不變的情況下,相應(yīng)投苗時(shí)間改變,苗爪未到投苗位置就投苗,導(dǎo)致投苗失敗;同時(shí)由于取苗頻率加快,相應(yīng)的取苗停頓間隔縮短,夾苗穩(wěn)定性降低。

表3 不同栽植速度下取苗投苗成功率
5 結(jié)論
(1)結(jié)合設(shè)計(jì)的自動(dòng)移栽機(jī)械,闡述了取苗、投苗以及分苗機(jī)械系統(tǒng)結(jié)構(gòu)及工作原理,基于PLC設(shè)計(jì)了整排取苗間隔投苗運(yùn)動(dòng)控制系統(tǒng),該控制系統(tǒng)實(shí)現(xiàn)了整排苗缽邊插邊夾,完成低速高效取苗;各取苗爪的開(kāi)合相互獨(dú)立,針對(duì)連續(xù)運(yùn)動(dòng)的分苗部件實(shí)現(xiàn)有序間隔投苗,且適應(yīng)不同穴盤(pán)及栽植頻率。
(2)采用20 d苗齡的黃瓜穴盤(pán)苗為試驗(yàn)對(duì)象,在不同栽植頻率下進(jìn)行取苗、投苗性能試驗(yàn),結(jié)果表明:在栽植頻率40~70株/min范圍內(nèi),72、128孔穴盤(pán)苗的取苗投苗綜合成功率平均值為97.98%。72孔穴在栽植頻率40株/min下,取投苗綜合成功率達(dá)99.31%,即使將栽植頻率提高到70株/min,取投苗綜合成功率也能達(dá)到95.15%,證明該控制系統(tǒng)可行,達(dá)到了高效自動(dòng)移栽目的。
1 于曉旭,趙勻,陳寶成,等.移栽機(jī)械發(fā)展現(xiàn)狀與展望[J/OL].農(nóng)業(yè)機(jī)械學(xué)報(bào),2014,45(8):44-53.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20140808&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2014.08.008.
YU Xiaoxu,ZHAO Yun,CHEN Baocheng,et al. Current situation and prospect of transplanter[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2014,45(8):44-53. (in Chinese)
2 張敏,馮江,宮成宇,等. 全自動(dòng)旱田移栽機(jī)頂出機(jī)構(gòu)的機(jī)理分析[J].農(nóng)機(jī)化研究,2014,36(3):85-89.
ZHANG Min, FENG Jiang, GONG Chengyu, et al. Analysis on ejector seedlings mechanism of automatic dry farmland transplanting machine[J]. Jourmal of Agricultural Mechanizationon Research, 2014,36(3): 85-89. (in Chinese)
3 韓綠化,毛罕平,嚴(yán)蕾,等. 穴盤(pán)育苗移栽機(jī)兩指四針鉗夾式取苗末端執(zhí)行器[J/OL].農(nóng)業(yè)機(jī)械學(xué)報(bào),2015,46(7):23-30.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20150704&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2015.07.004.
HAN Lühua, MAO Hanping, YAN Lei, et al. Pincette-type end-effect using two fingers and four pins for picking up seedlings[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(7): 23-30. (in Chinese)
4 童俊華,蔣煥煜,蔣卓華,等. 缽苗自動(dòng)移栽機(jī)器人抓取指針夾持苗坨參數(shù)優(yōu)化試驗(yàn)[J]. 農(nóng)業(yè)工程學(xué)報(bào),2014,30(16):8-16.
TONG Junhua, JIANG Huanyu, JIANG Zhuohua, et al. Experiment on parameter optimization of gripper needles clamping seedling plug for automatic transplanter[J]. Transactions of the CSAE, 2014, 30(16): 8-16. (in Chinese)
5 俞高紅,劉炳華,趙勻,等. 橢圓齒輪行星輪系蔬菜缽苗自動(dòng)移栽機(jī)構(gòu)運(yùn)動(dòng)機(jī)理分析[J]. 農(nóng)業(yè)機(jī)械學(xué)報(bào),2011,42(4):53-57.
YU Gaohong, LIU Binghua, ZHAO Yun, et al.Kinematic principle analysis of transplanting mechanism with planetary elliptic gears in automatic vegetable transplanter[J].Transactions of the Chinese Society for Agricultural Machinery,2011,42(4): 53-57. (in Chinese)
6 王蒙蒙,宋建農(nóng),劉彩玲,等. 蔬菜移栽機(jī)曲柄擺桿式夾苗機(jī)構(gòu)的設(shè)計(jì)與試驗(yàn)[J].農(nóng)業(yè)工程學(xué)報(bào),2015,31(14):49-57.
WANG Mengmeng, SONG Jiannong, LIU Cailing,et al. Design and experiment of crank rocker type clamp seedlings mechanism of vegetable transplanter[J]. Transactions of the CSAE,2015, 31(14): 49-57. (in Chinese)
7 韓長(zhǎng)杰,郭輝,張學(xué)軍,等. 硬質(zhì)穴盤(pán)苗自動(dòng)取苗裝置設(shè)計(jì)[J]. 農(nóng)業(yè)工程,2013,3(4):99-102.
HAN Changjie,GUO Hui, ZHANG Xuejun, et al. Design of automatic hard-plug-seedlings pick device[J]. Agricultural Engineering, 2013,3(4): 99-102.(in Chinese)
8 韓長(zhǎng)杰,楊宛章,張學(xué)軍,等.穴盤(pán)苗移栽機(jī)自動(dòng)取喂系統(tǒng)的設(shè)計(jì)與試驗(yàn)[J]. 農(nóng)業(yè)工程學(xué)報(bào),2013,29(8):51-61.
HAN Changjie, YANG Wanzhang, ZHANG Xuejun, et al. Design and test of automatic feed system for tray seedlings transplanter[J]. Transactions of the CSAE,2013, 29(8):51-61. (in Chinese)
9 吳儉敏,顏華,金鑫,等. 移栽機(jī)送盤(pán)裝置與定位控制系統(tǒng)研究[J/OL]. 農(nóng)業(yè)機(jī)械學(xué)報(bào),2013,44(增刊1):14-18. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=2013s103&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2013.S1.003.
WU Jianmin,YAN Hua,JIN Xin,et al.Research on disk conveying device and positioning control system for transplanter[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2013,44(Supp.1):14-18. (in Chinese)
10 魏新華,包盛,劉曉凱,等. 穴盤(pán)苗全自動(dòng)移栽機(jī)運(yùn)動(dòng)協(xié)調(diào)控制系統(tǒng)設(shè)計(jì)與移栽試驗(yàn)[J/OL]. 農(nóng)業(yè)機(jī)械學(xué)報(bào),2016,47(12):1-7,52. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20161201&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2016.12.001.
WEI Xinhua,BAO Sheng,LIU Xiaokai,et al. Design and experiment on potted-seedling automatic transplanter control system for motion coordinating[J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2016,47(12):1-7,52. (in Chinese)
11 嚴(yán)宵月,胡建平,吳福華,等. 整排取苗間隔放苗移栽機(jī)設(shè)計(jì)與試驗(yàn)[J/OL]. 農(nóng)業(yè)機(jī)械學(xué)報(bào),2013,44(增刊1):7-13.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=2013s102&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2013.S1.002.
YAN Xiaoyue, HU Jianping, WU Fuhua,et al.Design and experiment of full-row-pick-up and single-dropping seedling [J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2013,44(Supp.1):7-13. (in Chinese)
12 江蘇大學(xué).旱地移栽機(jī)整排取苗間隔放苗裝置: CN102342206A[P].2012-02-08.
13 郭林強(qiáng). 穴盤(pán)苗全自動(dòng)移栽機(jī)氣動(dòng)取苗裝置的設(shè)計(jì)與試驗(yàn)[D].鎮(zhèn)江:江蘇大學(xué),2016.
GUO Linqiang.Design and test on the pneumatic taking seedling mechanism of auto-transplanter[D].Zhenjiang:Jiangsu University,2016. (in Chinese)
14 KUMAR G V P, RAHEMAN H.Development of a walk-behind type hand tractor powered vegetable transplanter for paper pot seedlings[J]. Biosystems Engineering,2011,110(2):189-197.
15 王僑,曹衛(wèi)彬,張振國(guó),等.穴盤(pán)苗自動(dòng)取苗機(jī)構(gòu)的自適應(yīng)模糊PID定位控制[J]. 農(nóng)業(yè)工程學(xué)報(bào),2013,29(12):32-39.
WANG Qiao, CAO Weibin,ZHANG Zhenguo,et al. Location control of automatic pick-up plug seedlings mechanism based on adaptive fuzzy-PID[J]. Transactions of the CSAE, 2013, 29(12):32-39. (in Chinese)
16 楊麗紅. 蔬菜缽苗全自動(dòng)移栽機(jī)控制系統(tǒng)設(shè)計(jì)及研究[D].鎮(zhèn)江:江蘇大學(xué),2017.
YANG Lihong. Design and analysis of control system of automatic vegetable transplanting machine[D].Zhenjiang:Jiangsu University,2017.(in Chinese)
17 田素博,邱立春,張?jiān)?基于PLC的穴盤(pán)苗移栽機(jī)械手控制系統(tǒng)設(shè)計(jì)[J].沈陽(yáng)農(nóng)業(yè)大學(xué)學(xué)報(bào), 2007,38(1): 122-124.
TIAN Subo,QIU Lichun,ZHANG Shi.Control system of transplanting potted seedling manipulator based on PLC[J].Journal of Shenyang Agricultural University,2007,38(1): 122-124.(in Chinese)
18 倪有亮,金誠(chéng)謙,劉基. 全自動(dòng)移栽機(jī)取送苗系統(tǒng)的設(shè)計(jì)與試驗(yàn)[J]. 農(nóng)業(yè)工程學(xué)報(bào),2015,31(23):10-19.
NI Youliang, JIN Chengqian, LIU Ji. Design and experiment of system for picking up and delivering seedlings in automatic transplanter[J].Transactions of the CSAE, 2015, 31(23): 10-19. (in Chinese)
19 王小祥.增量式旋轉(zhuǎn)編碼器的簡(jiǎn)介與應(yīng)用[J].數(shù)字技術(shù)與應(yīng)用,2016(10):118-119.
20 胡敏娟,尹文慶,胡飛,等. 穴盤(pán)苗自動(dòng)取苗試驗(yàn)系統(tǒng)的研制[J]. 南京農(nóng)業(yè)大學(xué)學(xué)報(bào),2011,34(3):122-126.
HU Minjuan, YIN Wenqing, HU Fei, et al. Development of test system for automatic pick-up plug seedlings[J].Journal of Nanjing Agricultural University, 2011, 34(3):122-126. (in Chinese)
猜你喜歡
河北畫(huà)報(bào)(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
 農(nóng)業(yè)機(jī)械學(xué)報(bào)2018年6期
農(nóng)業(yè)機(jī)械學(xué)報(bào)2018年6期
- 農(nóng)業(yè)機(jī)械學(xué)報(bào)的其它文章
- 豬糞中溫和高溫厭氧發(fā)酵沼液對(duì)微藻培養(yǎng)的影響
- 水氮調(diào)控對(duì)輕度鹽化土滴灌棉花生理特性與產(chǎn)量的影響
- 水氮管理模式下水稻碳氮吸收、土壤呼吸與產(chǎn)量效應(yīng)
- 無(wú)寄生運(yùn)動(dòng)非對(duì)稱(chēng)空間2T1R并聯(lián)機(jī)構(gòu)設(shè)計(jì)與運(yùn)動(dòng)學(xué)分析
- 基于幾何代數(shù)的并聯(lián)機(jī)構(gòu)自由度自動(dòng)化分析
- 基于預(yù)見(jiàn)位姿信息的鉸接式車(chē)輛LQR-GA路徑跟蹤控制