基于改進(jìn)模糊控制的潛艇運(yùn)動(dòng)仿真研究
2018-07-04 13:08:04彭利坤呂幫俊
關(guān)鍵詞:深度
黃 斌 彭利坤 呂幫俊
(海軍工程大學(xué)動(dòng)力工程學(xué)院 武漢 430033)
0 引 言
潛艇在水下航行時(shí)受到多種因素的影響,需要通過(guò)不斷的操舵來(lái)保持潛艇定深航行.當(dāng)前,對(duì)于船舶自動(dòng)操舵控制的研究很多,大部分集中在對(duì)水面船舶航向的控制,而對(duì)于潛艇在垂直面的運(yùn)動(dòng)控制方面相對(duì)較少.其中PID控制[1-2]、魯棒控制[3]、自適應(yīng)神經(jīng)網(wǎng)絡(luò)控制[4]、模糊控制等控制方法在潛艇垂直面的運(yùn)動(dòng)中取得了較好的效果.
常規(guī)PID控制以被控參數(shù)誤差作為輸入,通過(guò)對(duì)誤差信號(hào)進(jìn)行比例、積分和微分的處理后,輸出控制量對(duì)系統(tǒng)進(jìn)行控制[5-6].但是由于潛艇本身質(zhì)量較大,操舵對(duì)于潛艇的運(yùn)動(dòng)的相應(yīng)有明顯的時(shí)間滯后性,因此常規(guī)的PID控制方法雖然能達(dá)到控制潛艇定深定常運(yùn)動(dòng)的效果,但是舵機(jī)的動(dòng)舵幅度與頻率較大,容易對(duì)舵機(jī)造成損耗,因此,本文設(shè)計(jì)一種模糊控制器來(lái)對(duì)潛艇的垂直面運(yùn)動(dòng)進(jìn)行控制,通過(guò)較平緩的操舵曲線(xiàn)來(lái)控制潛艇垂直面定深定常運(yùn)動(dòng),具有更加優(yōu)越的可操作性.
1 潛艇垂直面運(yùn)動(dòng)數(shù)學(xué)模型
當(dāng)潛艇在垂直面內(nèi)作弱機(jī)動(dòng)時(shí),運(yùn)動(dòng)參數(shù)Δu,w,q,δb,δs為小量時(shí),有
(1)
式中:第一式為水平直線(xiàn)運(yùn)動(dòng)方程,為水平直線(xiàn)運(yùn)動(dòng)的速度u與水平方向阻力X之間的簡(jiǎn)單函數(shù)關(guān)系,潛艇垂直面運(yùn)動(dòng)主要考慮式(1)中的二、三式.代入線(xiàn)性水動(dòng)力式,計(jì)及剩余靜載P,Mp和扶正力矩Mθθ的垂直面操縱運(yùn)動(dòng)線(xiàn)性方程為
Z0+Zδbδb+Zδsδs+P
M0+Mδbδb+Mδsδs+XTzT+MP+Mθθ
(2)
式中:m為潛艇質(zhì)量;u為潛艇水平方向速度分量;w為潛艇垂直方向速度分量;δb和δs分別為首舵和尾舵舵角;P和MP分別為剩余靜載力和力矩,Mθθ為扶正力矩,其余帶下標(biāo)的均為潛艇垂直面運(yùn)動(dòng)的水動(dòng)力系數(shù).采用四階龍格庫(kù)塔法對(duì)式(2)進(jìn)行迭代求解,得到潛艇的運(yùn)動(dòng)規(guī)律.
2 模糊控制器的設(shè)計(jì)
潛艇垂直面運(yùn)動(dòng)主要通過(guò)控制首舵和尾舵來(lái)保持和改變潛艇的運(yùn)動(dòng)狀態(tài),因此,模糊控制器的輸出量設(shè)定為首舵和尾舵的舵角.按照潛艇運(yùn)動(dòng)的特點(diǎn),本文設(shè)計(jì)兩個(gè)模糊控制器,一個(gè)用深度的誤差量作為輸入控制首舵,另一個(gè)用縱傾的誤差量作為輸入控制尾舵,兩個(gè)模糊控制器共同作用控制潛艇的垂直面運(yùn)動(dòng).
2.1 誤差及控制量的模糊化
深度模糊控制器的輸入為深度偏差E和深度偏差的變化率Ec,為了達(dá)到精確控制的效果,將E,Ec以及控制量δb的數(shù)值劃分為13個(gè)模糊集,即:負(fù)大(NB)、負(fù)大中(NBM)負(fù)中(NM)、負(fù)中小(NMS),負(fù)小(NS)、負(fù)小零(NSZ),零(ZE)、正小零(PSZ)、正小(PS)、正中小(PMS)、正中(PM)、正大中(PBM)、正大(PB).深度偏差E的論域設(shè)定為{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},其他變量的設(shè)定類(lèi)似,只是數(shù)值不同.經(jīng)過(guò)反復(fù)試驗(yàn),選擇標(biāo)準(zhǔn)正態(tài)分布作為隸屬度函數(shù).即
(3)
式中:μ為E相對(duì)于論域值Ek的隸屬度.特殊情況,當(dāng)E>6時(shí),取正大的隸屬度為1,當(dāng)E<-6時(shí),取負(fù)大的隸屬度為1.
縱傾模糊控制器的設(shè)計(jì)與深度模糊控制器類(lèi)似,將縱傾偏差及縱傾偏差變化率和控制量δs劃分為13個(gè)模糊集,選擇標(biāo)準(zhǔn)正態(tài)分布作為隸屬度函數(shù).
新舊標(biāo)度震級(jí)震級(jí)中誤差顯示,寬頻帶面波震級(jí)MS(BB)相對(duì)面波震級(jí) MS、新 ML相對(duì)于舊 ML收斂程度都有一定程度的改善。
2.2 模糊控制規(guī)則的確定
利用深度和縱傾誤差,設(shè)計(jì)合理的模糊控制規(guī)則來(lái)確定首舵和尾舵,是決定控制器好壞的重要環(huán)節(jié).結(jié)合潛艇垂直面運(yùn)動(dòng)的操縱規(guī)律:首舵δb>0時(shí),首舵作用力和力矩對(duì)潛艇產(chǎn)生上浮效果,反之對(duì)潛艇產(chǎn)生下潛效果.尾舵δs>0時(shí),尾舵作用力和力矩對(duì)潛艇產(chǎn)生首傾效果,反之對(duì)潛艇產(chǎn)生尾傾效果.按照上述規(guī)律并結(jié)合部隊(duì)實(shí)際操舵經(jīng)驗(yàn),首舵控制深度的模糊控制規(guī)則見(jiàn)表1.
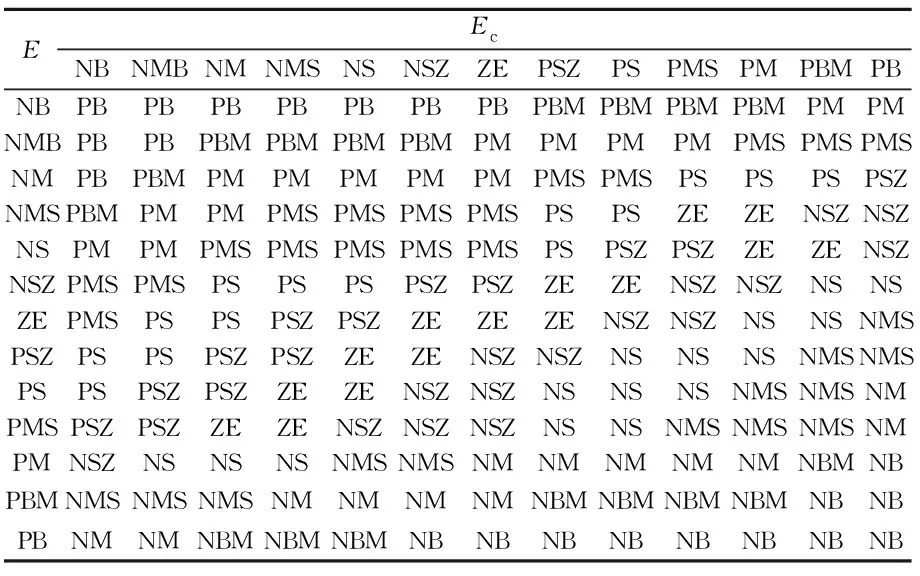
表1 首舵控制深度的模糊控制規(guī)則
模糊控制語(yǔ)言可表示為
ifE=EiandEc=Ecj
thenU=Uij
(4)
式中:i=1,2,…,13;j=1,2,…,13.表1結(jié)合首舵角δb的論域可以得到Uij的具體值,以及Uij對(duì)應(yīng)的權(quán)重,用Kij表示(即:Ei和Ecj隸屬度的乘積).最終得到首舵角的輸出值為
(5)
尾舵控制縱傾的模糊控制規(guī)則類(lèi)似,不再贅述.
3 潛艇運(yùn)動(dòng)控制仿真分析
3.1 靜水條件下,垂直面變深運(yùn)動(dòng)仿真
補(bǔ)充均衡完畢的潛艇,不考慮外界干擾力和力矩的作用,在靜水中由水下30 m潛至水下60 m,仿真結(jié)果見(jiàn)圖1~2.由仿真結(jié)果可知,在無(wú)外界干擾的情況下,均衡好的潛艇,PID控制和模糊控制都能很好的實(shí)現(xiàn)潛艇變深,從操舵曲線(xiàn)來(lái)看,兩種方法的操舵規(guī)律相近.
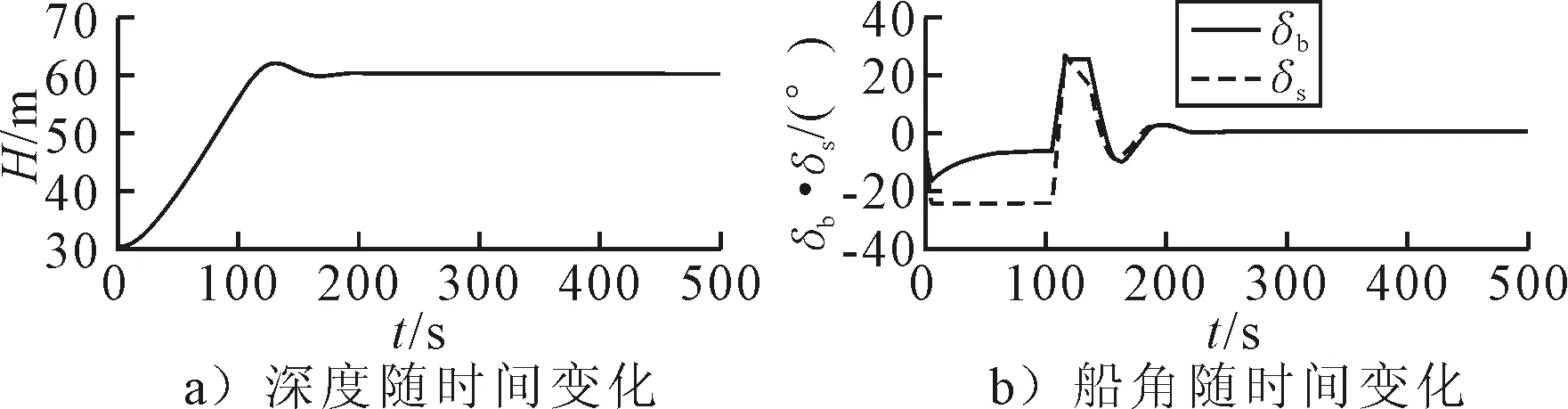
圖1 無(wú)干擾條件,PID控制器變深結(jié)果
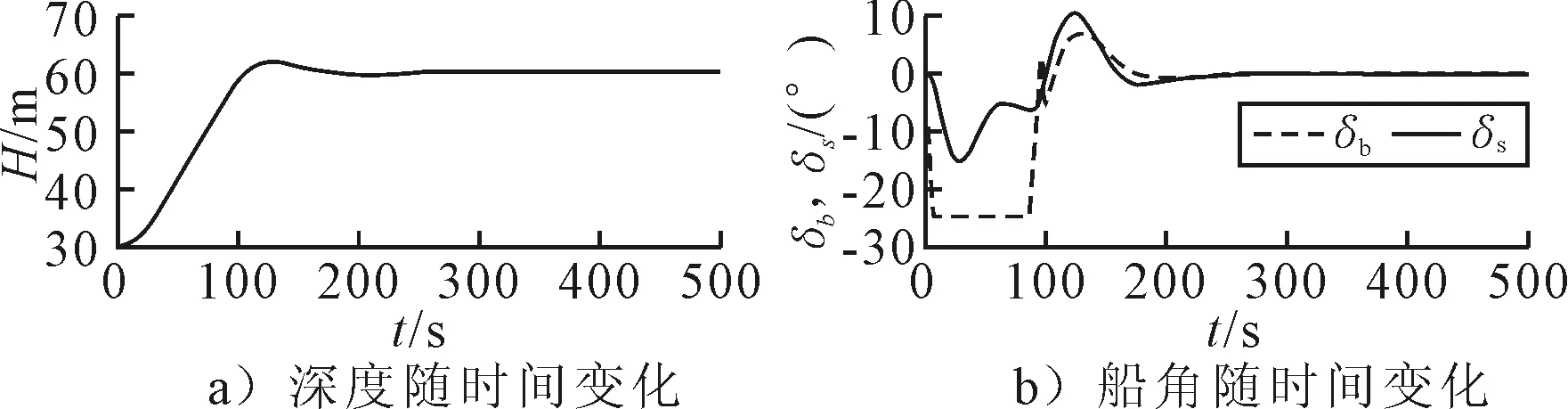
圖2 無(wú)干擾條件,模糊控制器變深仿真結(jié)果
3.2 外界干擾條件下,定深運(yùn)動(dòng)仿真
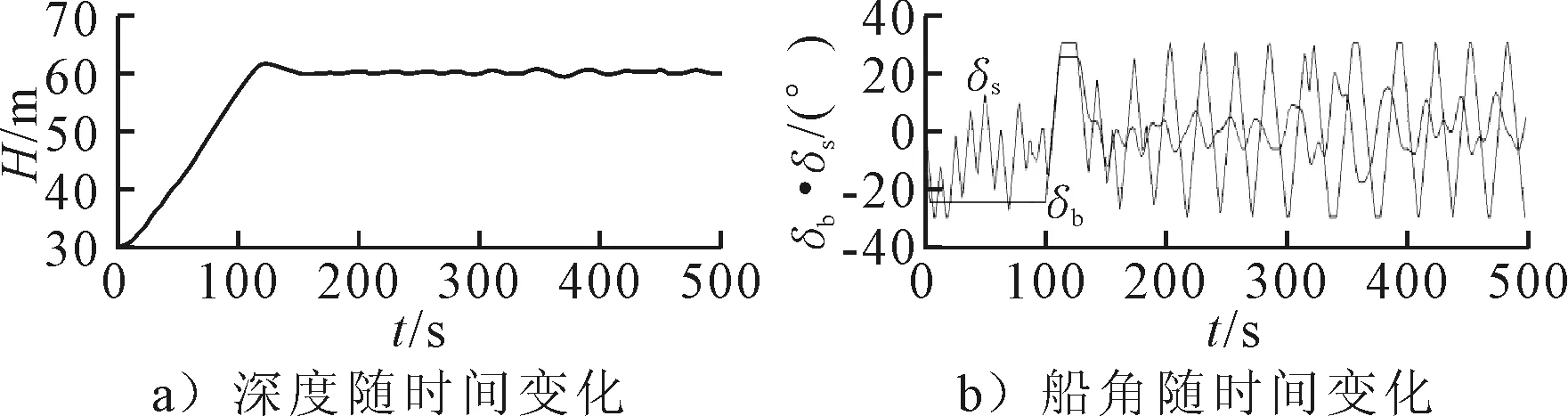
圖3 有干擾條件,PID控制器定深控制結(jié)果
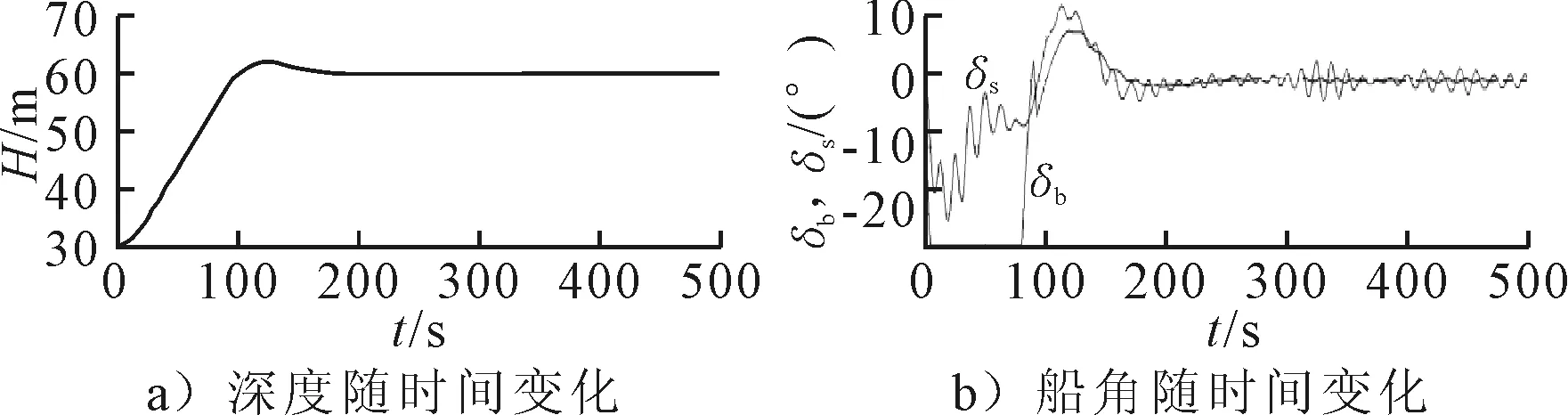
圖4 有干擾條件,模糊控制器定深控制結(jié)果
由仿真結(jié)果可知,在有干擾條件下的定深控制,兩種定深控制效果相近,模糊控制收斂速度略好一些.但是從轉(zhuǎn)舵幅度和頻率上來(lái)看,模糊控制的效果要遠(yuǎn)好于常規(guī)的PID控制.這是由于PID控制算法本身對(duì)誤差的相應(yīng)很靈敏,因此會(huì)出現(xiàn)操舵頻率高而且頻繁操極限舵角的現(xiàn)象,這樣對(duì)舵機(jī)的損害是較大的.模糊控制能用較小的操舵幅度來(lái)精確的控制潛艇定深航行,操舵曲線(xiàn)平滑,可操作性強(qiáng).
從模糊控制的原理上分析,控制器的輸入為誤差和誤差的變化率,相當(dāng)于PD控制,缺點(diǎn)就是“零輸入時(shí),零輸出”.因此上述的模糊控制器也存在控制死區(qū).當(dāng)要求潛艇以某一恒定的縱傾角定深或變深運(yùn)動(dòng)時(shí),上述的模糊控制器是無(wú)能為力的,因?yàn)榫夂玫臐撏胶饪v傾角為零,因此上述控制器可以控制潛艇保持無(wú)縱傾角定深航行,而無(wú)法實(shí)現(xiàn)潛艇有縱傾定深航行或不均衡條件下的定深航行[9-11].
4 模糊控制器的改進(jìn)

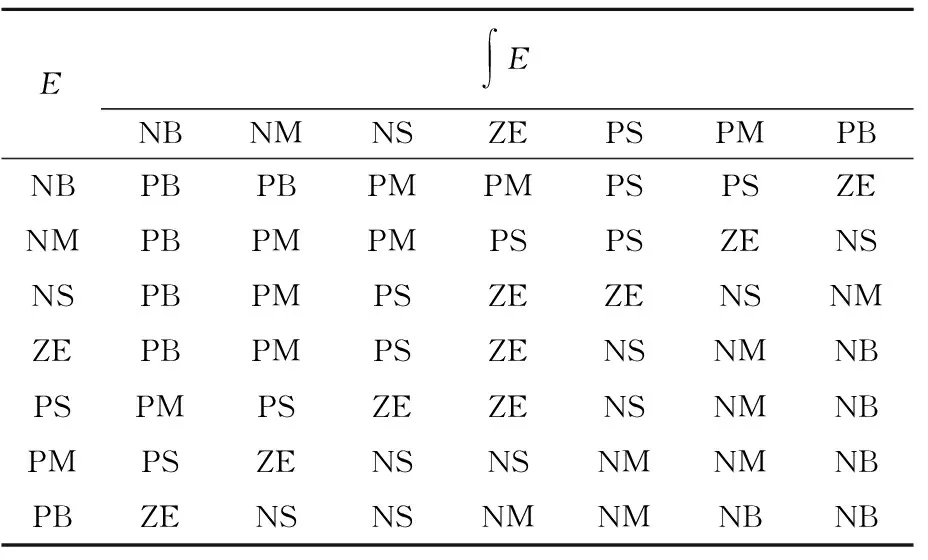
表2 尾舵控制縱傾角的模糊控制積分環(huán)節(jié)
加入積分環(huán)節(jié)后,模糊控制器輸出舵角值為:原模糊控制器輸出加上積分環(huán)節(jié)輸出的值.因此積分環(huán)節(jié)的輸出舵角值的論域不能過(guò)大,否則會(huì)出現(xiàn)飽和現(xiàn)象,經(jīng)反復(fù)試驗(yàn),取首舵模糊積分環(huán)節(jié)Δδb的論域?yàn)閧-0.06,-0.04,-0.02,0,0.02,0.04,0.06},尾舵模糊積分環(huán)節(jié)Δδs的論域?yàn)閧-0.003,-0.002,-0.001,0,0.001,0.002,0.003}.
無(wú)外界干擾條件下,利用改進(jìn)的模糊控制器對(duì)潛艇以3°首縱傾角,由30 m變深至60 m,運(yùn)動(dòng)進(jìn)行控制.并用原模糊控制器結(jié)果進(jìn)行對(duì)比,結(jié)果見(jiàn)圖5~6.
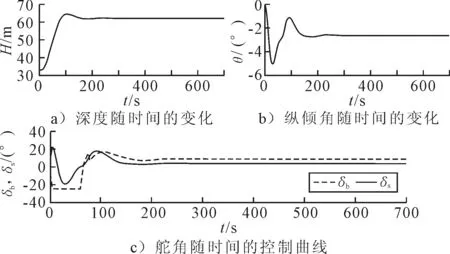
圖5 無(wú)干擾條件,無(wú)模糊積分仿真結(jié)果
在有隨機(jī)持續(xù)波浪力的干擾條件下,以3°首縱傾角,由30 m變深至60 m,運(yùn)動(dòng)進(jìn)行控制,結(jié)果見(jiàn)圖7~8.
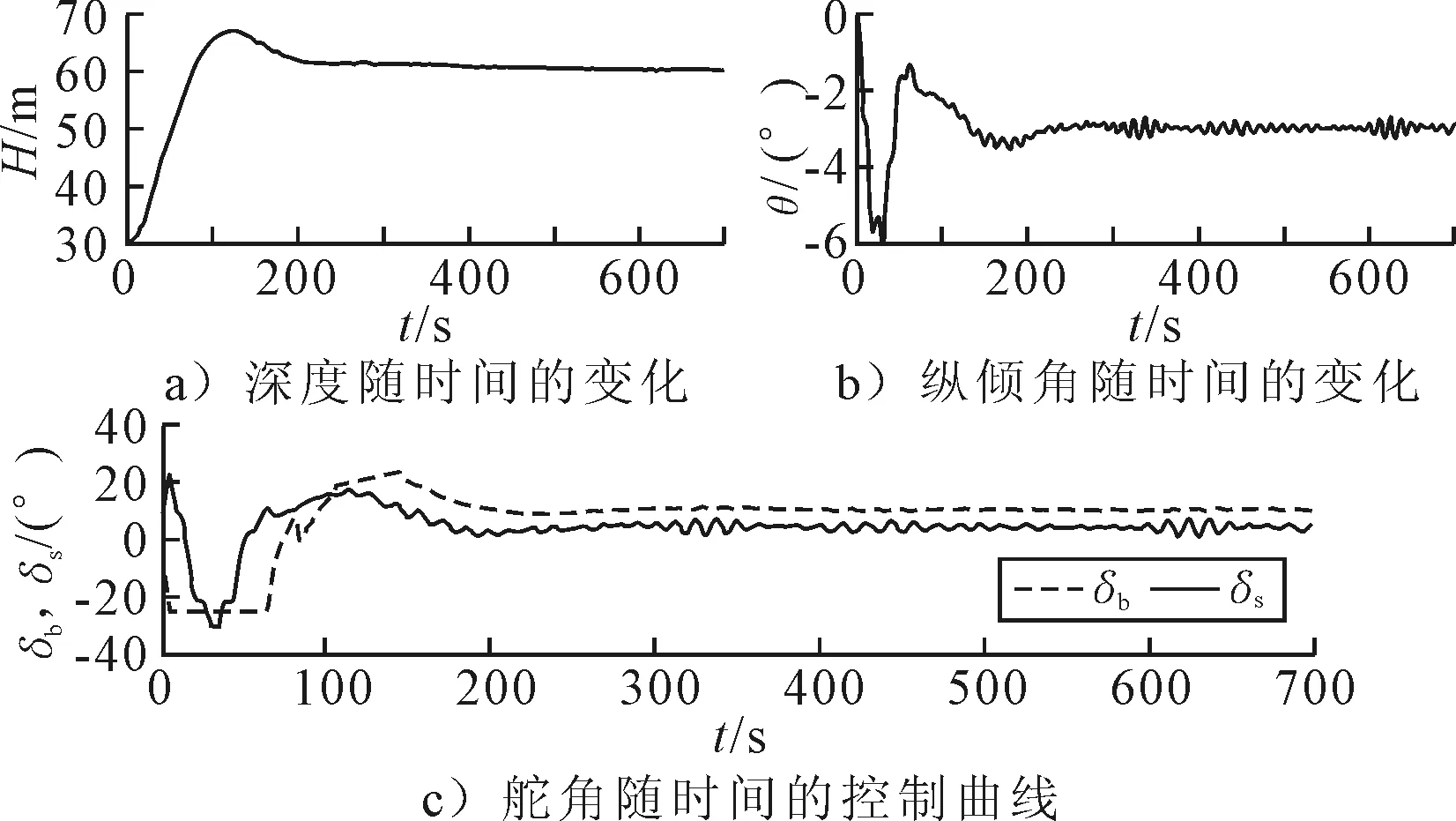
圖8 干擾條件,加入模糊積分結(jié)果
由仿真結(jié)果可知,無(wú)模糊積分環(huán)節(jié)的控制器無(wú)法使?jié)撏г谧兩钸^(guò)程中達(dá)到預(yù)期的縱傾角,存在明顯的靜差,而且由于縱傾不為零產(chǎn)生的不均衡量,使得深度亦不能達(dá)到預(yù)期的深度,深度也存在明顯的靜差,見(jiàn)圖5和圖7.在深度(首舵)和縱傾(尾舵)控制中加入模糊積分環(huán)節(jié)后,可有效消除模糊控制器的靜差,使?jié)撏П3?°首縱傾角做變深運(yùn)動(dòng),見(jiàn)圖6和圖8.
5 結(jié) 束 語(yǔ)
本文設(shè)計(jì)的一種適用于潛艇垂直面運(yùn)動(dòng)的模糊控制器,能夠更好的適應(yīng)潛艇在有持續(xù)隨機(jī)外界擾動(dòng)條件下的控制,而且操舵曲線(xiàn)比較平滑,具有較好的可操作性.另外,通過(guò)加入模糊積分環(huán)節(jié),有效的解決了傳統(tǒng)模糊控制存在控制死區(qū)的問(wèn)題,能夠使?jié)撏г诖嬖诓痪饬亢统掷m(xù)外界干擾的條件下,按照預(yù)期的深度和縱傾角定深航行.
參考文獻(xiàn)
[1] 楊鹽生,于曉莉,賈欣樂(lè).船舶航向魯棒PID自動(dòng)舵設(shè)計(jì)[J].大連海事大學(xué)學(xué)報(bào),1999(25):11-15.
[2] 張顯庫(kù),郭晨,楊鹽生.兩種非線(xiàn)性魯棒PID控制器[J].黑龍江大學(xué)自然科學(xué)學(xué)報(bào),2005(22):606-609.
[3] 劉健,林莉,郭亦平,等.潛艇垂直面運(yùn)動(dòng)的魯棒控制[J].艦船科學(xué)技術(shù),2011(33):32-36.
[4] 趙陽(yáng),邢繼峰.潛艇垂直面運(yùn)動(dòng)自適應(yīng)神經(jīng)網(wǎng)絡(luò)模糊控制仿真[J].計(jì)算機(jī)仿真,2009(26):26-29.
[5] 胡坤,吳超.潛艇深度模糊控制及仿真研究[J].系統(tǒng)仿真學(xué)報(bào),2004(16):2364-2366.
[6] 梁海軍,閆超.環(huán)境干擾力作用下船舶操縱運(yùn)動(dòng)仿真數(shù)學(xué)模型研究[J].艦船科學(xué)技術(shù),2015(37):153-156.
[7] 劉可峰,連璉,姚寶恒.潛艇低速運(yùn)動(dòng)時(shí)操縱控制仿真[J].艦船科學(xué)技術(shù),2014,36(11):19-22.
[8] XIONG H Y,WU G J. Unsteady analysis of six-DOF motion of a 6:1 prolate spheroid in viscous fluid[J]. Science China Physics, Mechanics & Astronomy,2017(60): 1-16.
[9] 高峻吉,黃昆侖,朱軍.潛艇定深運(yùn)動(dòng)的自適應(yīng)模糊控制研究[J].海軍工程大學(xué)學(xué)報(bào),2004(16):83-88.
[10] 彭利坤,呂幫俊,陳佳.潛艇操縱[M].武漢:海軍工程大學(xué)出版社,2016.
[11] CHEN C W, KOUH J S, TSAI J S. Maneuvering modeling and simulation of auv dynamic systems with euler-rodriguez quaternion method[J]. China Ocean Eng,2013(27):403-416.
猜你喜歡
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2022年6期)2022-06-05 06:50:50
快樂(lè)學(xué)習(xí)報(bào)·教育周刊(2022年16期)2022-05-01 21:25:05
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年11期)2020-12-14 06:59:52
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年8期)2019-01-14 01:14:28
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年10期)2019-01-08 02:44:26
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年6期)2019-01-08 02:43:04
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年12期)2018-08-26 06:03:48
新聞傳播(2016年10期)2016-09-26 12:14:59
新聞傳播(2015年10期)2015-07-18 11:05:40
交通建設(shè)與管理(2015年15期)2015-03-20 15:18:57