基于半實物仿真的精度評估技術
2018-07-02 22:35:42韓潔杜會盈毛洪川胡怡芳
科技傳播 2018年11期
韓潔 杜會盈 毛洪川 胡怡芳
摘 要 艦炮系統精度是艦炮武器系統的一項重要戰技指標,傳統的依靠靶場大量實驗得出艦炮系統精度的手段會造成大量的人力、物力、財力的消耗,因此我們設計了一種基于半實物仿真的艦炮精度評估技術。
關鍵詞 艦炮武器系統;模擬信號;精度評估技術
中圖分類號 TJ8 文獻標識碼 A 文章編號 1674-6708(2018)212-0099-03
當前的艦炮武器系統一般由跟蹤器、火控設備、艦炮和導航設備組成,跟蹤器測量目標現在點的位置參數,并傳給火控設備,火控設備根據現在點位置、艦艇運動參數、彈道氣象參數等方法,計算出火炮的瞄準全角,使彈丸能在未來點上與目標相遇,達到毀傷目標的目的[ 1 ]。
系統精度是指艦炮火控系統運行時工作的準確度或精確度,是艦炮武器系統關鍵指標之一。如果精度不能滿足系統要求,炮彈發射后就不能準確命中目標,所以必須對艦炮武器系統的精度進行測試。傳統的依靠靶場大量實驗得出系統精度的手段會造成大量的人力、物力、財力的消耗,因此我們提出了一種模擬信號驅動半實物場景下的艦炮精度評估技術,與真實環境相比采用模擬信號取代了真實目標從而驅動艦炮武器系統聯動。具有試驗簡單、大量且可重復,可以模擬多種目標(飛機、艦艇等),多種不同航路等優點,減少系統訓練費用,提高武器系統工作質量和戰備完好性,為滿足系統的測試性和保障性需求提供高效支持。
1 精度評估技術
1.1 技術原理
根據雷達監測目標原理可知,雷達接收到的目標反射回波中包含了目標的相關信息,目標反射回波相對發射時刻的時間延遲反映了目標的徑向距離,回波信號的頻率偏差反映了目標的徑向速度,回波信號相對天線指向的信號幅度強弱反映了目標的空間位置。模擬器接收到預設航路后,換算成回波延遲時間,多普勒頻率疊加量,方位差信號幅度及相位控制量,俯仰差信號幅度及相位控制量,輸出為包含雷達目標特性的回波仿真信號。驅動跟蹤器捕獲、跟蹤模擬目標,從而實時驅動艦炮武器系統聯動。
精度評估技術的工作原理是利用預先設定的目標航路(航路信息包含目指數據、己艦姿態數據、氣象參數等),啟動信號模擬器,驅動跟蹤器捕獲、跟蹤模擬目標,導航設備轉發預設的導航信息、火控設備解算射擊諸元并協調艦炮瞄準,我們根據艦炮的實時架位信息與預設航路理論上的艦炮架位進行誤差統計從而檢查整個系統的精度。
同時由于艦炮武器系統中各傳感器在艦艇上所處位置不同,對目標的測量元素不同,所基于的坐標系也是不一樣的[2],預設的目標航路數據是基于艦艇地理坐標系,而跟蹤器接收的模擬數據則是基于火炮甲板坐標系。因此需要先將目標航路從艦艇地理坐標系轉換為火炮甲板坐標系,再將坐標變換后的航路發送給模擬器,模擬器根據當前的航路信息判斷并產生對應的模擬信號,從而驅動跟蹤器捕獲模擬目標。
具體的技術原理見圖1。
1.2 航路坐標變換
與艦炮武器系統有關的坐標系包括大地坐標系、艦艇地理坐標系、火炮甲板坐標系、托架坐標系、慣性坐標系等。本文僅介紹艦艇地理坐標系與火炮甲板坐標系之間的坐標變換公式。
艦艇地理坐標系O-XYZ
O—艦艇搖擺中心;
Ox—水平面垂直于艦艏線,右舷方向為正;
Oy—艦艏線在水平面的投影,艦艏線方向為證;
Oz—垂直于水平面向上,指向天頂方向為正。
火炮甲板坐標系O-X1Y1Z1
O—艦艇搖擺中心;
Ox1—甲板平面內垂直于Oy軸右舷方向為正;
Oy1—甲板平面內平行于艦艏方向為正;
Oz1—垂直于甲板平面指向天頂方向為正。
坐標變換主要包括球坐標系與空間直角坐標系之間的變換,艦艇地理坐標系和火炮甲板坐標系之間的變換。
1)球坐標(R,A,E)與空間直角坐標(X,Y,Z)
2)艦艇地理坐標系(X0,Y0,Z0)和火炮甲板坐標系(X1,Y1,Z1)
艦艇地理坐標系是穩定坐標系,火炮甲板坐標系由于受到海上風浪的影響為不穩定坐標系,在X軸和Y軸發生了轉動(即海上航行時的縱搖角和橫搖角)。由于兩個坐標系的原點為同一原點,因此我們可以利用歐拉角的轉動算子,計算出火炮甲板坐標系與艦艇地理坐標系之間的轉換公式。
由圖2可知,艦艇地理坐標系O-XYZ變換到與火炮甲板坐標系O-X1Y1Z1重合,需要經過兩次轉動:
1)坐標系O-XYZ進行縱搖變換,即繞X軸旋轉縱搖角Z(艏搖向上為正),變換為坐標系O-? X0Y1Z2。
2)坐標系O-?X0Y1Z2進行橫搖變換,即繞Y軸旋轉橫搖角H(右舷向下為正),變換為O-X1Y1Z1。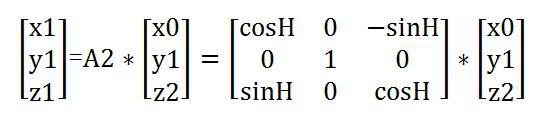
3)因此艦艇地理坐標系O-XYZ變換到火炮甲板坐標系O-X1Y1Z1,存在如下變換。
火炮甲板坐標系O-X1Y1Z1變換到艦艇地理坐標系O-XYZ的變換矩陣為A-1,由于A為正交矩陣,因此,A-1=AT。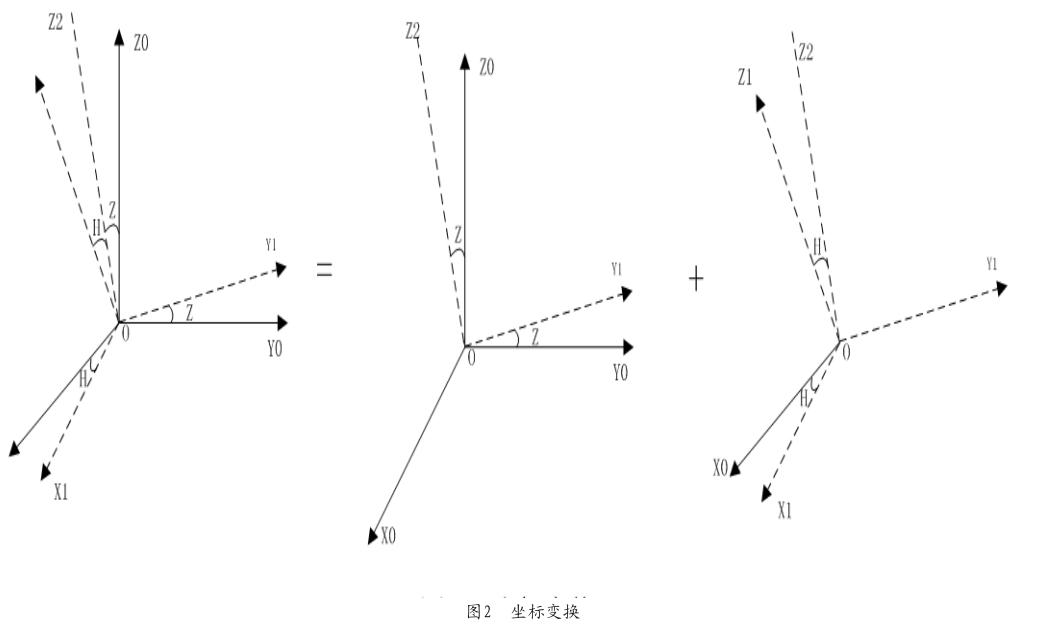

1.3 精度評估準則
航路啟動后,根據目標航路不同,程序中規定了統計該航路誤差的開始和停止時刻、采樣時間間隔、采樣時刻對應的方向/高低架位的理論值。我們接收到火炮實時的方位/高低架位后利用以下的公式計算誤差,直至統計停止時刻即可得出統計時間段內火炮的方向架位誤差均值/均方差和高低架位誤差均值/均方差。
誤差統計的計算公式如下:
誤差的均值: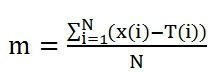
誤差的均方差: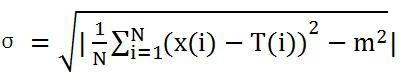
公式中:x(i)——來自火炮實時的方向/高低架位;
T(i)——對應時刻的火炮方向/高低架位的理論值;
N——統計的誤差點的個數。
統計的結果包括誤差均值和誤差均方差。誤差均值代表統計時間段內誤差數據的集中趨勢,誤差均方差則代表統計時間段內誤差的離散程度。均方值較大則代表大部分誤差與誤差平均值之間的差異較大,均方值較小則代表這些誤差較接近誤差平均值,根據系統規定的可接收的誤差均值和誤差均方差,可檢驗當前艦炮武器系統的精度是否滿足系統要求。
2 結論
本文提到的模擬信號驅動半實物場景下的精度評估技術已在實際中得到了應用,并取得了良好的效果。
利用系統的精度評估功能,可進行大量目標航路的模擬仿真,節約大量的人力、物力、財力開支,減少了外場試驗,縮短了試驗時間。是一種高效的艦炮武器系統精度檢測方法。
參考文獻
[1]朱慶和.提高艦炮武器系統精度的一種有效方法——誤差相消原理[J].火力與指揮控制,1996(4):21-26.
[2]周志恒,趙建軍,桑德一,等.艦艇姿態對作戰系統動態對準精度的影響分析[J],兵工自動化,2016,35(5):51-55.
