永磁同步電動(dòng)舵機(jī)系統(tǒng)滑模變結(jié)構(gòu)控制器設(shè)計(jì)
2018-06-25 03:10:44蘇偉杰王厚浩
上海航天 2018年3期
蘇偉杰,張 軍,張 波,王厚浩,陶 鍵
(上海航天控制技術(shù)研究所,上海 201109)
0 引言
電動(dòng)舵機(jī)系統(tǒng)機(jī)械結(jié)構(gòu)中存在齒輪、滾珠絲桿等傳動(dòng)機(jī)構(gòu),且系統(tǒng)中包含大量非線性因素[1],因此傳統(tǒng)的比例-積分-微分(PID)控制器在控制性能方面存在明顯缺陷。將滑模變結(jié)構(gòu)控制與矢量控制相結(jié)合可克服永磁同步電動(dòng)舵機(jī)系統(tǒng)中存在的參數(shù)擾動(dòng)、外部負(fù)載擾動(dòng)和驅(qū)動(dòng)飽和、電流耦合等影響[2],從而提升永磁同步電動(dòng)舵機(jī)系統(tǒng)的魯棒性,提高控制系統(tǒng)性能。與傳統(tǒng)的無刷直流電動(dòng)舵機(jī)伺服系統(tǒng)相比,永磁同步電動(dòng)舵機(jī)系統(tǒng)在控制方式上具有突出優(yōu)勢。無刷直流電動(dòng)舵機(jī)系統(tǒng)[3]往往采用位置-電流雙閉環(huán)控制[6],同時(shí)利用舵機(jī)上的電位器采樣獲得位置信息進(jìn)行微分,構(gòu)成“偽速度環(huán)”,因此控制系統(tǒng)存在明顯的速度環(huán)滯后現(xiàn)象。永磁同步電動(dòng)舵機(jī)系統(tǒng)[7]采用位置-速度-電流三閉環(huán)的矢量控制方式,在id=0的控制模式下,不僅模擬了無刷直流系統(tǒng)的控制性能,且因速度信息由旋轉(zhuǎn)變壓器直接獲得,故速度環(huán)滯后現(xiàn)象得以克服。然而,受旋轉(zhuǎn)變壓器采樣精度的限制(例如最小識(shí)別量為30 r/min),實(shí)際系統(tǒng)在低速狀態(tài)下獲得的速度信息并不準(zhǔn)確,容易出現(xiàn)隨機(jī)抖動(dòng)。特別是對(duì)傳統(tǒng)的滑模變結(jié)構(gòu)算法而言,滑模態(tài)趨近于原點(diǎn)時(shí),抖振更加明顯。雖然目前改進(jìn)的變結(jié)構(gòu)控制器在削弱抖振方面取得了較好效果,但抖振劇烈的問題并未得到徹底、有效的解決。在今后較長一段時(shí)間內(nèi),抖振問題仍將是電動(dòng)舵機(jī)變結(jié)構(gòu)控制研究的重點(diǎn),以及制約變結(jié)構(gòu)控制算法工程應(yīng)用的主要因素。智能控制算法與變結(jié)構(gòu)控制相結(jié)合的復(fù)合控制方法,利用先進(jìn)的控制理論可有效削弱系統(tǒng)抖振,但該方法算法復(fù)雜,工程實(shí)現(xiàn)難度大。飽和函數(shù)方法在解決抖振問題時(shí),存在較難向高階系統(tǒng)擴(kuò)展的問題。利用趨近律方法可設(shè)計(jì)簡單且易于實(shí)現(xiàn)的變結(jié)構(gòu)控制器,盡管該方法得到廣泛應(yīng)用并取得豐碩成果,但仍未解決抖振問題。因此,本文針對(duì)滑模態(tài)原點(diǎn)附近的抖振情況,改進(jìn)了基于變趨近律的滑模變結(jié)構(gòu)算法。同時(shí),將滑模控制末端與PID控制算法相結(jié)合設(shè)計(jì)了新的組合控制器。這種設(shè)計(jì)思路既可最大程度地發(fā)揮滑模變結(jié)構(gòu)控制的快速性與魯棒性,又可利用PID控制的優(yōu)勢減小系統(tǒng)最后的抖振,且算法設(shè)計(jì)簡單,易于工程實(shí)現(xiàn)。在低速狀態(tài)下,速度信息的獲取仍采用無刷直流系統(tǒng)的方式,通過對(duì)位置信息進(jìn)行微分獲得,保證了低速狀態(tài)下速度信息的準(zhǔn)確性。
1 永磁同步電動(dòng)舵機(jī)系統(tǒng)模型
在永磁同步電機(jī)矢量控制系統(tǒng)建模分析中,d-q同步旋轉(zhuǎn)坐標(biāo)系數(shù)學(xué)模型最為常見。通常將d軸定義在轉(zhuǎn)子的N極上,因此,在d-q同步旋轉(zhuǎn)坐標(biāo)系下,永磁同步電機(jī)數(shù)學(xué)模型可表示為
(1)
式中:ud,uq為定子d,q軸電壓分量;id,iq為定子d,q軸電流分量;ω為轉(zhuǎn)子機(jī)械角速度;Rs為定子繞組電阻;Ld,Lq為定子繞組d,q軸電感分量;ψf為轉(zhuǎn)子永磁體磁鏈;np為極對(duì)數(shù);F為轉(zhuǎn)子摩擦系數(shù);J為轉(zhuǎn)動(dòng)慣量;TL為負(fù)載力矩。

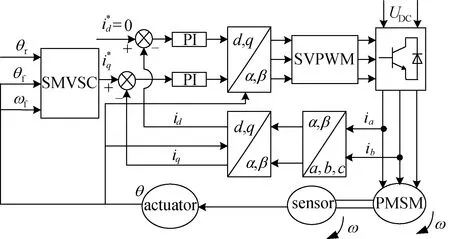
圖1 永磁同步電動(dòng)舵機(jī)控制原理框圖Fig.1 Principle diagram of permanent magnet synchronous motor servo
2 滑模變結(jié)構(gòu)控制基本原理
滑模變結(jié)構(gòu)控制與常規(guī)控制的根本區(qū)別在于控制的不連續(xù)性。該控制特性可迫使系統(tǒng)做“滑模”運(yùn)動(dòng),即在一定特性下沿滑模面做小幅度、高頻率的上下運(yùn)動(dòng)。這種滑模運(yùn)動(dòng)與系統(tǒng)參數(shù)及擾動(dòng)無關(guān),具有很強(qiáng)的魯棒性[10]。

(2)
式中:s(x)為切換函數(shù);u+(x),u-(x)分別為滑模面兩側(cè)的控制量。

圖2 滑模變結(jié)構(gòu)控制的兩個(gè)階段Fig.2 Two phases of sliding mode variable structure control
控制律u的任務(wù)是使相軌跡先運(yùn)動(dòng)到滑模上,再沿滑模面運(yùn)動(dòng)到原點(diǎn)。實(shí)際滑動(dòng)模態(tài)的相軌跡如圖3所示,這是出現(xiàn)了抖振的情況。因?qū)嶋H控制對(duì)象具有慣性和延時(shí)特性,相軌跡總會(huì)穿過切換面,之后又被迅速拉回來,故形成了沿著切換面的高頻抖振[10]。這種抖振反映在位置輸出上為在平衡位置附近的高頻抖振。在設(shè)計(jì)滑模變結(jié)構(gòu)控制器時(shí),要在保證系統(tǒng)控制品質(zhì)的前提下,盡量削弱抖振。

圖3 實(shí)際滑動(dòng)模態(tài)Fig.3 Real sliding mode
3 滑模變結(jié)構(gòu)控制器設(shè)計(jì)
根據(jù)永磁同步電機(jī)id=0矢量控制方程(電磁轉(zhuǎn)矩運(yùn)動(dòng)方程),可得永磁同步電機(jī)矢量控制系統(tǒng)簡化框圖,如圖4所示。其中,力矩線性增益Kt=1.5npψf,電磁轉(zhuǎn)矩Te=Ktiq,ωr為轉(zhuǎn)速指令。
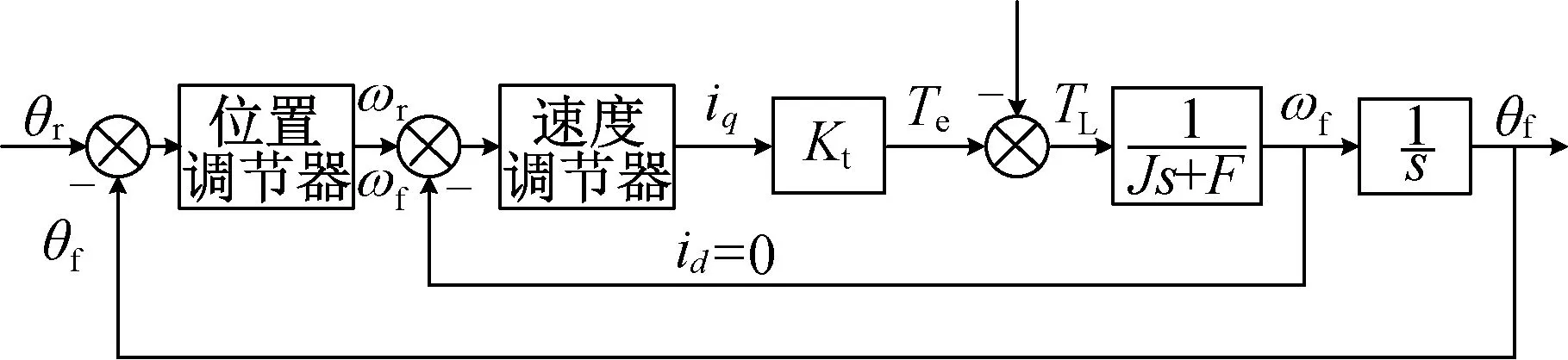
圖4 永磁同步電機(jī)矢量控制系統(tǒng)簡化框圖Fig.4 Simplified block diagram of permanent magnet synchronous motor vector control system
由圖4可得永磁同步電機(jī)位置伺服系統(tǒng)簡化方程為
(3)


(4)

3.1 基于指數(shù)趨近律的滑模變結(jié)構(gòu)控制器設(shè)計(jì)
令永磁同步電機(jī)的位置跟蹤誤差為
e=θr(t)-θf(t)
(5)
對(duì)式(5)求導(dǎo)可得速度跟蹤誤差表達(dá)式為
(6)
選擇滑模面

(7)
εsgn(s)+ks],ε>0,k>0
(8)
在選定切換面和滑模控制律后,針對(duì)滑模控制器選用李亞普諾夫函數(shù)V=0.5s2來證明滑模平面穩(wěn)定存在滑動(dòng)模態(tài)。對(duì)李亞普諾夫函數(shù)求導(dǎo)得
s[-ε|e|sgn(s)-ks-M(t)]≤
|M(t)||s|-ε|e||s|≤0
(9)
由此可見,上述設(shè)計(jì)的滑模變結(jié)構(gòu)控制器能滿足要求。
3.2 滑模變結(jié)構(gòu)控制器改進(jìn)與優(yōu)化
滑模控制律u的作用是將系統(tǒng)跟蹤狀態(tài)維持在滑模面附近,但同時(shí)也在滑模面附近產(chǎn)生了高頻抖振。由式(8)可知,切換控制增益k的取值確保控制律能夠忽略不確定項(xiàng)的影響,但k取值越大,隨之產(chǎn)生的抖振就越大。因此,控制器往往存在快速性能與抖振不能兼顧的問題。如何在保證快速性的同時(shí),又能抑制系統(tǒng)抖振的產(chǎn)生,一直是滑模變結(jié)構(gòu)控制研究的熱點(diǎn)問題。
針對(duì)這一問題,學(xué)者們提出了各種改進(jìn)方法,其中較常采用的有兩種[11]:一種是通過優(yōu)化算法,對(duì)滑模變結(jié)構(gòu)算法本身進(jìn)行改進(jìn),例如對(duì)符號(hào)函數(shù)的連續(xù)化改進(jìn)、指數(shù)趨近律的分段趨近[12]、利用參數(shù)估計(jì)和擾動(dòng)補(bǔ)償?shù)确椒ㄌ岣呖刂屏康木萚13]等;另一種是將不同的控制策略結(jié)合起來,在充分發(fā)揮滑模變結(jié)構(gòu)控制強(qiáng)魯棒性,對(duì)擾動(dòng)的系統(tǒng)響應(yīng)和調(diào)整速度快等優(yōu)點(diǎn)的基礎(chǔ)上,利用其他控制方法來消除滑模變結(jié)構(gòu)控制本身所固有的抖振[13],減小靜差,實(shí)現(xiàn)優(yōu)勢互補(bǔ)。目前,與滑模變結(jié)構(gòu)相結(jié)合應(yīng)用于PMSM控制系統(tǒng)的控制策略主要有模糊控制、神經(jīng)網(wǎng)絡(luò)控制、模型參考自適應(yīng)控制、PID控制,遺傳算法控制等。
結(jié)合以上兩種方式,本文將變指數(shù)趨近律設(shè)計(jì)與位置-速度環(huán)PID算法相結(jié)合,對(duì)控制器進(jìn)行改進(jìn)與優(yōu)化。兩種方式取長補(bǔ)短,當(dāng)滑模變結(jié)構(gòu)控制器將系統(tǒng)狀態(tài)穩(wěn)定于滑模面附近時(shí),進(jìn)入PID控制器,使控制系統(tǒng)在保證魯棒性的同時(shí)實(shí)現(xiàn)無超調(diào)、無靜差的控制性能。
1) 利用變指數(shù)趨近律設(shè)計(jì)改善滑模變結(jié)構(gòu)控制器的快速性
為彌補(bǔ)指數(shù)趨近律自身的缺陷,在減小滑模抖振的同時(shí),提升滑模態(tài)初期趨近速度,設(shè)計(jì)了一種新的指數(shù)趨近律,即變指數(shù)趨近律,其形式為

(10)
式中:η=ε|e|為同誤差成正比的可變量。取相應(yīng)的控制律為
ηsgn(s)+ks],ε>0,k>0
(11)
由式(10)分析可知:新設(shè)計(jì)的趨近律使系統(tǒng)的狀態(tài)運(yùn)動(dòng)點(diǎn)在距離滑模面較遠(yuǎn)時(shí),以較快的速率快速趨向滑模面,保證了系統(tǒng)的快速響應(yīng)特性;而當(dāng)其接近滑模面時(shí),-ηsgn(s)趨近于零,抖振減小。為進(jìn)一步改善系統(tǒng)的快速性,對(duì)變指數(shù)趨近律的滑模增益ε進(jìn)行重新設(shè)計(jì),即
(12)
式中:m為與實(shí)際系統(tǒng)相關(guān)的常量。
由式(12)可知,新的滑模增益可隨位置誤差信號(hào)的變化而調(diào)整。
2) 利用基于末端PID的合控制器抑制滑模抖振
為增強(qiáng)系統(tǒng)的控制精度,減少系統(tǒng)位置跟蹤的超調(diào)與靜差,考慮在控制過程的末端引入PID控制。當(dāng)位置誤差較小時(shí)(|e|≤0.01),系統(tǒng)由變指數(shù)趨近律滑模控制器切換到PID控制器進(jìn)行控制。新的組合控制器如圖5所示,控制器輸入為舵偏角指令與反饋的偏差,輸出為電流環(huán)給定,滑模控制模塊與PID控制模塊由舵偏角偏差量進(jìn)行控制切換。
4 仿真結(jié)果分析
為驗(yàn)證控制器的性能,本文利用SIMULINK工具箱搭建永磁同步電動(dòng)舵機(jī)控制系統(tǒng)模型,利用S函數(shù)對(duì)滑模變結(jié)構(gòu)控制器及組合控制器進(jìn)行設(shè)計(jì)仿真。仿真中采用的永磁同步電動(dòng)舵機(jī)系統(tǒng)參數(shù)為:Rs=2.875 Ω,Ld=Lq=8.5 mH,ψf=0.175 Wb,J=0.0 008 kg·m2,F(xiàn)=0.1 mN·m·s,np=2,額定轉(zhuǎn)速5 000 r/min,傳動(dòng)比1∶100。控制器參數(shù)可根據(jù)具體仿真情況調(diào)整。
為驗(yàn)證組合控制器的效果,對(duì)指數(shù)趨近律滑模變結(jié)構(gòu)控制器與組合控制器進(jìn)行仿真,仿真波形如圖6~8所示,其中在0.1 s時(shí)刻給定30°的階躍舵偏角指令。

圖5 組合控制器示意圖Fig.5 Schematic diagram of combination controller

圖6 指數(shù)趨近律控制器仿真波形Fig.6 Simulation of exponential reaching law controller
圖7 指數(shù)趨近律控制器和組合控制器對(duì)比圖(k=1 000)

圖8 組合控制器的轉(zhuǎn)矩、轉(zhuǎn)速和電流抖振(k=1 000)Fig.8 Torque, speed and current chattering of combination controller(k=1 000)
圖6為基于指數(shù)趨近律的滑模變結(jié)構(gòu)控制器仿真波形。由圖6可知,隨著控制器切換控制增益k值增大,系統(tǒng)的超調(diào)和抖振都將增大,且跟蹤快速性并未顯著提高,因此一味地增大k值并不能提高系統(tǒng)性能。
圖7為基于指數(shù)趨近律的滑模變結(jié)構(gòu)控制器仿真波形與基于變指數(shù)趨近律的PID組合控制器仿真波形的對(duì)比圖。由圖7可知,與指數(shù)趨近律控制器相比,組合控制器靜差小,位置跟蹤穩(wěn)態(tài)基本無抖振。
圖8為基于指數(shù)趨近律的滑模變結(jié)構(gòu)控制器與基于變指數(shù)趨近律的PID組合控制器輸出的轉(zhuǎn)矩、轉(zhuǎn)速和電流曲線。由圖8可知,組合控制器對(duì)系統(tǒng)穩(wěn)態(tài)的抖振有很好的抑制效果,提高了舵系統(tǒng)的控制精度與穩(wěn)態(tài)性能。
5 結(jié)束語
滑模變結(jié)構(gòu)控制中的抖振抑制問題歷來是滑模變結(jié)構(gòu)控制的研究重點(diǎn),國內(nèi)外學(xué)者對(duì)相關(guān)算法做了許多改進(jìn)并取得了不少研究成果。但這些算法或多或少存在著算法實(shí)現(xiàn)復(fù)雜、控制條件苛刻等問題,不易于工程應(yīng)用。本文針對(duì)永磁同步電動(dòng)舵機(jī)系統(tǒng),設(shè)計(jì)了基于變指數(shù)趨近律的滑模變結(jié)構(gòu)控制與PID控制相結(jié)合的組合舵偏角控制器,抑制了指數(shù)趨近律滑模變結(jié)構(gòu)控制器在滑模面附近的高頻抖振。仿真結(jié)果表明:組合控制器將系統(tǒng)靜差減小了85%并基本消除了滑模末端的抖振。與改進(jìn)前的控制器相比,組合控制器具有較強(qiáng)的魯棒性與快速性,設(shè)計(jì)簡單,便于后期導(dǎo)彈舵機(jī)系統(tǒng)DSP、FPGA的算法實(shí)現(xiàn),具有較強(qiáng)的工程實(shí)踐性。因?qū)嶋H系統(tǒng)存在不確定性,故具體控制參數(shù)的調(diào)試仍依賴于舵機(jī)系統(tǒng)電機(jī)的選型與舵機(jī)結(jié)構(gòu)、傳動(dòng)比的設(shè)計(jì)。
[1] 張明月. 含間隙滾珠絲杠式電動(dòng)舵機(jī)動(dòng)態(tài)特性分析[J]. 計(jì)算機(jī)仿真, 2016, 33(1): 63-67, 126.
[2] 唐勇奇, 汪超, 趙葵銀. 模糊滑模變結(jié)構(gòu)控制在交流伺服系統(tǒng)中應(yīng)用[J]. 微特電機(jī), 2006, 34(2): 36-38.
[3] 夏長亮, 方紅偉. 永磁無刷直流電機(jī)及其控制[J]. 電工技術(shù)學(xué)報(bào), 2012, 27(3): 25-34.
[4] PANT M, THANGARAJ R, ABRAHAM A. Optimal tuning of PI speed controller using nature inspired heuristics [J]. Intelligent Systems Design and Applications, 2008(8): 420-425.
[5] 王宏. 無刷直流電動(dòng)機(jī)控制系統(tǒng)的研究與設(shè)計(jì)[D]. 南京: 南京理工大學(xué), 2003.
[6] 張躍, 韓雪峰. 雙環(huán)控制電動(dòng)舵機(jī)系統(tǒng)的設(shè)計(jì)驗(yàn)證[J]. 光學(xué)精密工程, 2015, 23(11): 3138-3146.
[7] 蘭根龍, 齊蓉, 吳春. 永磁同步電動(dòng)舵機(jī)控制系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)[J]. 微電機(jī), 2014, 47(3): 73-77.
[8] 吳春, 齊蓉, 李兵強(qiáng), 等. 永磁同步電機(jī)在電動(dòng)舵機(jī)伺服系統(tǒng)中的應(yīng)用[J]. 微特電機(jī), 2012, 40(5): 10-12.
[9] 李永東, 張猛. 高性能交流永磁同步電機(jī)伺服系統(tǒng)現(xiàn)狀[J]. 伺服控制, 2008(1): 34-37.
[10] LIN S C, CHEN Y Y. Design of self-learning fuzzy sliding mode controllers based on genetic algorithms[J]. Fuzzy Sets and System, 1997, 86(2):139-153.
[11] ALFARO-CID E, MCGOOKIN E W, MURRAY-SMITH D J, et al. Genetic algorithms optimization of decupled sliding mode controllers: Simulated and real results[J]. Control Engineering Practice, 2005, 13(6): 739-748.
[12] 童克文, 張興, 張昱, 等. 基于新型趨近律的永磁同步電動(dòng)機(jī)滑模變結(jié)構(gòu)控制[J]. 中國電機(jī)工程學(xué)報(bào), 2008, 28(21): 102-106.
[13] 王艷敏, 馮勇, 陸啟良. 永磁同步電動(dòng)機(jī)的無抖振滑模控制系統(tǒng)設(shè)計(jì)[J]. 電機(jī)與控制學(xué)報(bào), 2008, 12(5): 514-519.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
哲學(xué)評(píng)論(2021年2期)2021-08-22 01:53:34
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中華詩詞(2019年7期)2019-11-25 01:43:04
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
影視與戲劇評(píng)論(2016年0期)2016-11-23 05:26:01
