向量總變分耦合色彩差異的圖像邊緣提取算法
2018-06-19 13:11:54徐兆佳
計(jì)算機(jī)工程與設(shè)計(jì) 2018年6期
徐兆佳,楊 莉,甘 斌
(1.湖北第二師范學(xué)院 計(jì)算機(jī)學(xué)院,湖北 武漢 430205;2.華中科技大學(xué) 計(jì)算機(jī)科學(xué)與技術(shù)學(xué)院,湖北 武漢 430074)
0 引 言
當(dāng)前,許多邊緣提取方法[1,2]中提到了邊緣特征的操作,在這些方法中大多以圖像梯度為基礎(chǔ),建立計(jì)算模型,通過不同的算子對(duì)邊緣處理,完成邊緣提取。在眾多的方法中,涉及的算子主要包含Sobel、Prewitt、Robert[3,4]。近來,提出了基于跳野神經(jīng)網(wǎng)絡(luò)思想[5],王剛等一些學(xué)者提出了一種亞像素方法[6]。然而,上述這些方法只針對(duì)灰度圖像而設(shè)計(jì),并不適合彩色圖像。
然而,前期的各種邊緣提取方法主要研究的是黑白圖像及灰度圖像,但隨著彩色圖像的豐富,如何有效提取彩色圖像邊緣特征逐漸成為了一種熱門的研究對(duì)象。在常用的彩圖邊緣提取過程中,彩圖首先被變換為灰度圖,再對(duì)灰度圖提取特征,最后以所得到結(jié)果作為所需彩圖邊緣。毛若羽等[7]提出了改進(jìn)Canny的彩圖邊緣提取方法,將圖像劃分為多個(gè)子圖像,并根據(jù)子圖像邊緣梯度獲得動(dòng)態(tài)閾值,完成邊緣提取;雷濤等[8]提出基于視覺感知修正方法,通過圖像的梯度計(jì)算,并利用非線性函數(shù)調(diào)整色調(diào)梯度,再引入修正的視覺感知計(jì)算矢量梯度,提取邊緣;張樹忠[9]提出改進(jìn)的HSI形態(tài)學(xué)圖像邊緣提取方法,其形態(tài)學(xué)梯度中引入迭代與雙結(jié)構(gòu)多尺度,通過梯度計(jì)算來提取邊緣。
然而,這些方法是通過亮度不同來尋找邊緣,并沒有考慮彩圖中的色差。因此彩圖中的一些邊緣信息不能被充分檢測(cè)出來,影響了彩圖邊緣提取的完整性和有效性。
為此,本文設(shè)計(jì)了自適應(yīng)VTV耦合色差的彩圖邊緣提取技術(shù)。采用自適應(yīng)VTV去噪模型來降低噪聲的影響。然后將彩圖變換為視覺感知均勻的CIELAB空間,并計(jì)算CIELAB中色差和方向。對(duì)于不同色差和方向,通過不同的Sobel算子,同時(shí),綜合非最大抑制法對(duì)彩圖細(xì)化,搜索更多的邊緣點(diǎn)。再利用自適應(yīng)DT法來提取彩圖邊緣。最后,測(cè)試了所提邊緣提取算法的性能。
1 向量總變分模型
向量總變分(vector total variation,VTV)模型[10,11]是一種根據(jù)梯度構(gòu)建的濾波函數(shù),在多通道SAR圖像濾波處理中被廣泛使用。其函數(shù)滿足以下關(guān)系[10]
x= (x,y)→f(x)=
(f1(x),f2(x),…,fn(x))f:Ω→Rn
(1)
其中,Ω為圖像的空間域,fi:Ω→R(1≤i≤n)表示第i通道。對(duì)此,向量值圖像空間上的VTV范數(shù)為
(2)

(3)
(4)
因此,向量值圖像空間上的VTV模型可表示如下
(5)

通過式(5)添加正則因子λ,則其可演變?yōu)?/p>
(6)
根據(jù)Chamholle的理論[12]可得出:式(5)中表示的VTV只有唯一解,當(dāng)λ>0時(shí),式(5)與式(6)相同。
通過VTV模型進(jìn)行濾波能夠抑制圖像的噪聲,但其沒有考慮特征的影響,濾波系數(shù)只有通過梯度值決定。因此,VTV在應(yīng)用過程中會(huì)使圖像分辨率與細(xì)節(jié)信息下降。對(duì)此,為了提高VTV的濾波能力,需要同時(shí)考慮圖像的梯度值與幅度值。
2 本文算法設(shè)計(jì)
傳統(tǒng)的Canny運(yùn)用高斯濾波抑制噪聲,去噪的過程也消除了部分邊緣。通過VTV能夠較好消除灰度圖像噪聲,并且能對(duì)邊緣像素較好保留。因此,本文根據(jù)VTV模型來設(shè)計(jì)自適VTV模型,并運(yùn)用Sobel來計(jì)算色差和方向。首先,采用自適應(yīng)VTV去噪模型,降低噪聲影響。然后將彩圖變換CIELAB空間,并計(jì)算CIELAB的色差和方向。對(duì)于不同色差和方向,采用不同的Sobel,運(yùn)用非最大抑制對(duì)彩圖細(xì)化,尋找圖像中的可能邊緣點(diǎn);最后,再利用自適應(yīng)DT提取邊緣。整個(gè)邊緣提取算法的過程如圖1所示。
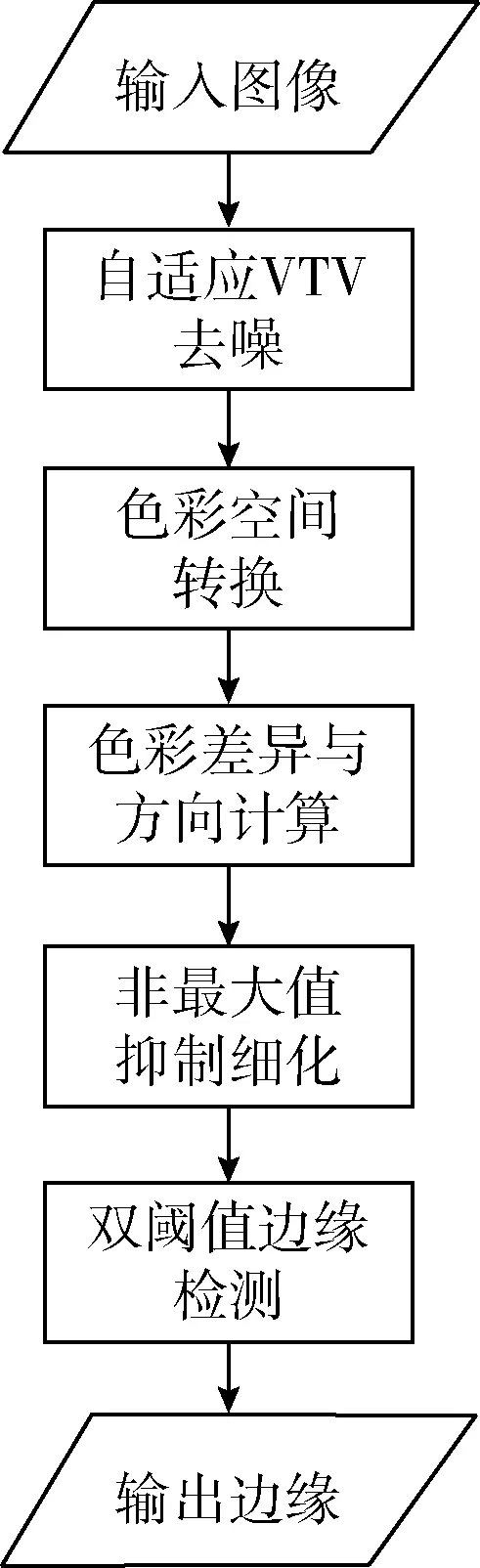
圖1 本文算法流程
2.1 自適應(yīng)VTV去噪
針對(duì)VTV模型在應(yīng)用過程中會(huì)使圖像分辨率與細(xì)節(jié)信息下降的不足,本文提出了一種自適應(yīng)的VTV模型。在VTV的迭代過程中,正則因子λ表示原濾波系數(shù);同時(shí),根據(jù)幅值大小決定不同的濾波因子,有效保留目標(biāo)特征。幅值大的像素對(duì)應(yīng)的濾波因子也變大,幅值小的像素濾波因子相應(yīng)變小。自適應(yīng)的VTV模型定義如下
(7)
(8)
(9)
(10)
那么,式(9)可簡(jiǎn)化為
(11)
因此,根據(jù)離散化處理,式(7)的迭代方程表示為
(12)

(13)
通過迭代方程(12)得出的{f(k)},其收斂的值為方程(12)的解。
在迭代過程中,根據(jù)梯度值與幅值來確定不同像素的濾波因子,因此,不同位置的像素的濾波因子不同。對(duì)于當(dāng)前像素幅值(邊緣)大時(shí),當(dāng)前濾波因子比鄰域像素濾波因子大,迭代時(shí)當(dāng)前像素保持不變,達(dá)到對(duì)邊緣的保留作用。如果當(dāng)前像素幅值(非邊緣)很小時(shí),則當(dāng)前像素與鄰域像素的濾波因子基本相等,那么將進(jìn)行傳統(tǒng)的VTV濾波,從而完成對(duì)圖像濾波處理,使其很好的保留了邊緣和細(xì)節(jié)區(qū)域。
2.2 色差計(jì)算
CIELAB為一個(gè)視覺感知均勻的空間,去噪后的圖像首先由RGB空間變換到CIEXYZ空間[13]
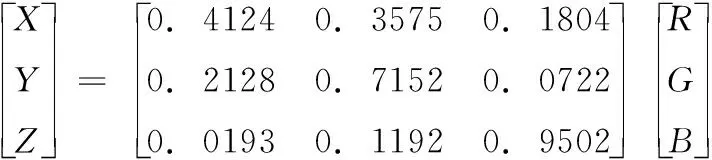
(14)
由CIEXYZ空間到CIELAB空間轉(zhuǎn)化定義如下
(15)
其中
(16)
式中:的X0,Y0,Z0分別取值的為,X0=95.047,Y0=100,Z0=108.883,L表示亮度,a和b表示色度。相互之間的色差運(yùn)用以下方程計(jì)算(17)
CD=(xm,n,xp,q)=
(17)
通過式(11)與式(12)表示水平方向色差和垂直方向的色差,定義如下
Dx=CD(xi-1,j+1,xi-1,j-1)+
2CD(xi,j+1,xi,j-1)+CD(xi+1,j+1,xi+1,j-1)
(18)
Dy=CD(xi+1,j-1,xi-1,j-1)+
2CD(xi+1,j+1,xi-1,j)+CD(xi+1,j+1,xi-1,j+1)
(19)
(20)
(21)
其中,CDS表示Sobel色差,φ表示色差方向。色差和色差方向被用來代替梯度幅度和方向。
2.3 彩色圖像邊緣
傳統(tǒng)的Canny主要是采用高斯濾波對(duì)噪聲抑制,其標(biāo)準(zhǔn)差決定了平滑度[14]。其次,通過使用Sobel計(jì)算水平與垂直方位的一階導(dǎo)數(shù),梯度G和方向θ定義如下
(22)
(23)
其中,G與θ分別為梯度與方向,Ix和Iy分別為水平與垂直的灰度。
為了消除非極值點(diǎn),利用NMS[15]對(duì)梯度值處理;尋找局部極值,剔除非極大值。對(duì)于3×3中,將當(dāng)前像素P在8個(gè)方位對(duì)其它像素按梯度方向執(zhí)行比較。對(duì)于每個(gè)像素,將當(dāng)前P和梯度方向的兩個(gè)梯度執(zhí)行對(duì)比,如果P的梯度小于比較的兩個(gè)梯度,那么令P=0;反之,保持P不變。通過NMS對(duì)像素細(xì)化,從而保持了較高精度的梯度。
通過NMS處理之后,分別利用兩個(gè)閾值T1和T2對(duì)圖像像素進(jìn)行分類,梯度比T1更大的像素點(diǎn)處于邊緣上;反之,梯度比T2更小的像素點(diǎn)為非邊緣。如果梯度處于T1與T2之間的像素,那么需要判斷該區(qū)域是否有大于T1的像素,有的話為邊緣像素,反之就不是。因此,雙閾值的確定具有決定作用。將極大值抑制分類為3種,分別為非邊緣點(diǎn)C0;邊緣點(diǎn)C2;不確定點(diǎn)C1。第i類的像素為ni;第i類的像素在總像素的概率為Pi。設(shè)C0、C1、C2發(fā)生的概率為μ0(k),μ1(k,m),μ2(m),那么評(píng)價(jià)函數(shù)定義為


(24)
(25)
通過對(duì)式(25)求解,可得到m,k的值,其中m=T1,k=T2。
在全局最優(yōu)準(zhǔn)則下,對(duì)于不同區(qū)域的梯度,計(jì)算每個(gè)區(qū)域的各自的閾值。從而兼顧整體最優(yōu)和局部細(xì)節(jié)保護(hù),完成圖像邊緣點(diǎn)尋找。
3 實(shí)驗(yàn)結(jié)果和分析
為了驗(yàn)證所提算法的優(yōu)異性,本文以RGB彩圖進(jìn)行實(shí)驗(yàn)。開發(fā)工具為VS2010,借助C#語言完成,濾波窗口大小為3×3。并將將基于Canny的彩圖邊緣提取基數(shù)[7]、視覺感知修正彩圖邊緣提取方法[8],以及改進(jìn)的HSI空間形態(tài)學(xué)彩圖邊緣提取技術(shù)[9]作為對(duì)照組,為便于標(biāo)記分別稱之為A、B、C算法。
3.1 算法評(píng)價(jià)指標(biāo)
為了對(duì)性能進(jìn)行定量測(cè)量,引入常用的邊緣評(píng)價(jià)因子F與Baddeley誤差度量(Bad)作為測(cè)量指標(biāo),其中,F(xiàn)定義如下[16]
(26)
式中:NI與NA為真實(shí)邊緣與實(shí)驗(yàn)邊緣像素?cái)?shù)量;α為常量;d(k)為實(shí)驗(yàn)邊緣與真實(shí)邊緣的距離。F越大,說明得到邊緣越清晰與完整。
假設(shè)I1和I2為尺寸為N×M的兩個(gè)圖像,并且P={1,…,N}×{1,…,M}作為該位置的集。則Bad定義如下[17]
(27)

3.2 實(shí)驗(yàn)結(jié)果
圖2為花朵圖像檢測(cè)的邊緣結(jié)果。圖2(a)為花朵彩圖,圖2(b)為本文算法得到邊緣。圖2(c)為灰度圖像,圖2(d)為Canny得到的灰度圖像邊緣。從圖2中可看出,本文算法得到的花朵邊緣完整、清晰,花瓣上的紋理細(xì)節(jié)能夠較好顯示,邊緣連續(xù)性較好,較好反應(yīng)了飛機(jī)的花朵邊緣與細(xì)節(jié)。圖2(d)為基于Canny算子對(duì)灰度圖像得到的結(jié)果,其邊緣不夠完整,導(dǎo)致微弱邊緣丟失,通過與圖2(b)對(duì)照,本文方法對(duì)彩圖的邊緣具有良好提取效果,并且對(duì)微弱邊緣和紋理同樣有效。主要是本文對(duì)彩色圖像基礎(chǔ)上,計(jì)算了圖像色彩的差異和方向,并通過非最大值抑制對(duì)邊緣細(xì)化,提高了邊緣的定位精度。

圖2 花朵圖像邊緣提取
圖3為不同方法對(duì)一幅小狗彩圖提取實(shí)驗(yàn)。圖3(a)為原圖像;圖3(b)~圖3(e)分別為A、B、C算法以及本文算法得到的結(jié)果。根據(jù)圖3(e)中得出,本文算法對(duì)彩色圖像的邊緣能夠較好提取,對(duì)小狗圖像中弱邊緣和低對(duì)照度區(qū)域均能夠有效提取,得到的邊緣連續(xù)性好。圖3(b)、圖3(c)中邊緣連續(xù)性較差,對(duì)于低對(duì)照度區(qū)域邊緣提取效果不理想,對(duì)于小狗的毛發(fā)等細(xì)節(jié)部分無法有效檢測(cè)。圖3(d)檢測(cè)效果優(yōu)于圖3(b)、圖3(c),但是相對(duì)于圖3(e)效果略差一點(diǎn),對(duì)于一些局部區(qū)域的細(xì)節(jié)無法有效檢測(cè)。

圖3 小狗圖形邊緣提取
為了驗(yàn)證所提出的方法的去除噪性能,實(shí)驗(yàn)時(shí)通過對(duì)圖3(a)的小狗彩色圖添加噪聲密度κ=0.2的椒鹽噪聲,并利用A、B、C方法與提出方法對(duì)圖像提取邊緣,如圖4所示。根據(jù)圖4中看出,在一定的椒鹽噪聲密度為0.2下,本文算法仍能夠有效對(duì)彩色圖像邊緣提取,對(duì)小狗的毛發(fā)區(qū)域的邊緣清晰,完整性較好。圖4(b)~圖4(d)中得到的邊緣出現(xiàn)了間斷,連續(xù)性較差,并且對(duì)于對(duì)照度低和細(xì)節(jié)紋路區(qū)域的邊緣提取測(cè)效果不理想,出現(xiàn)了較多的漏檢現(xiàn)象。說明了提出方法抗噪機(jī)能較好。
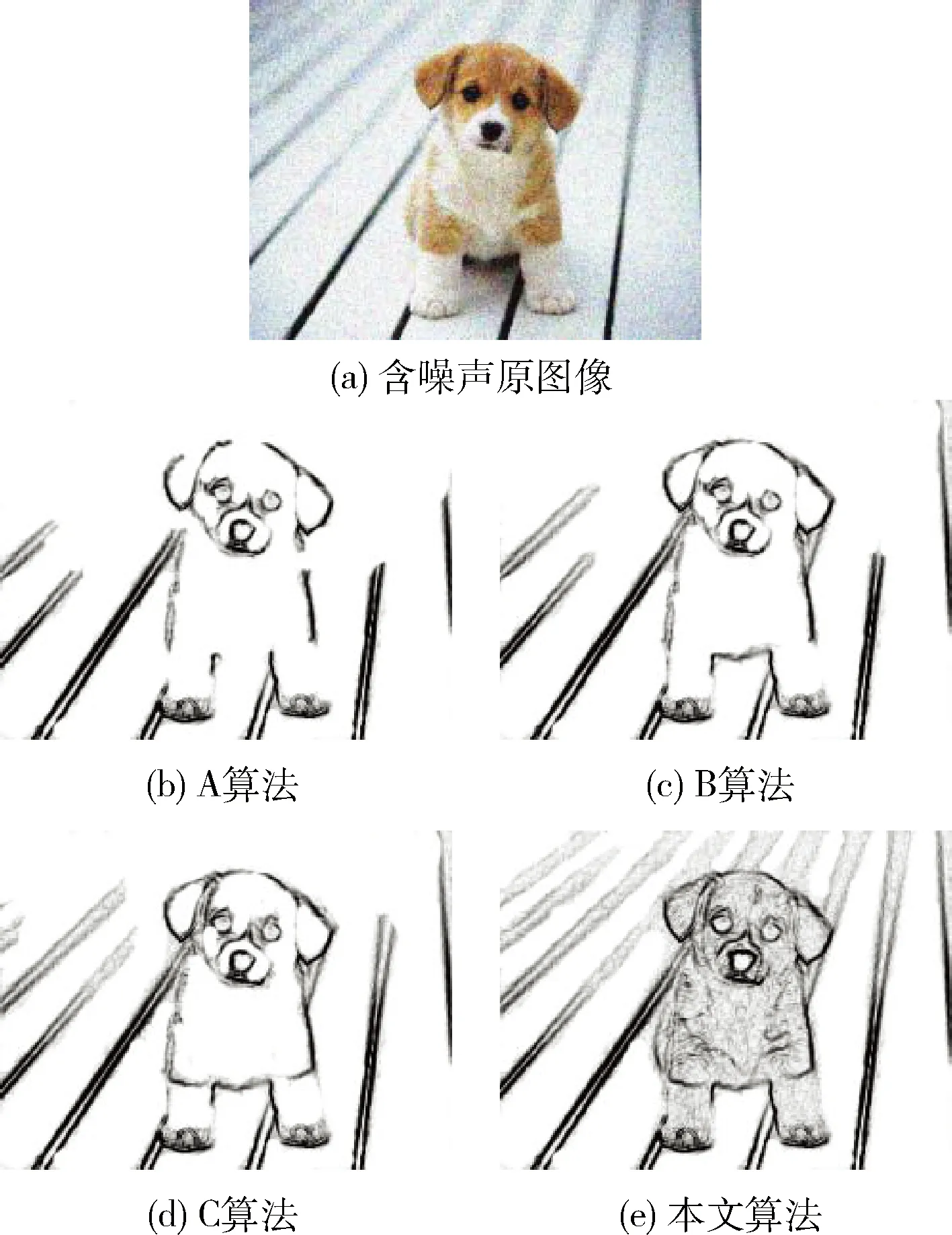
圖4 算法抗噪性測(cè)試
為了對(duì)算法性能定量評(píng)價(jià),對(duì)圖3與圖4得到的實(shí)驗(yàn)結(jié)果進(jìn)行測(cè)量其評(píng)價(jià)因子F與Bad誤差,見表1與表2。根據(jù)表1、表2中看出,本文算法子啊評(píng)價(jià)指標(biāo)F與Bad誤差中具有大幅提高,其評(píng)價(jià)因子F可達(dá)0.91,Bad誤差可達(dá)42.36。同時(shí)得知,在噪聲情況下,本文算法仍能夠獲得較好的實(shí)驗(yàn)結(jié)果,與無噪聲的邊緣提取結(jié)果相差較小,說明了本文算法的抗噪性優(yōu)異。
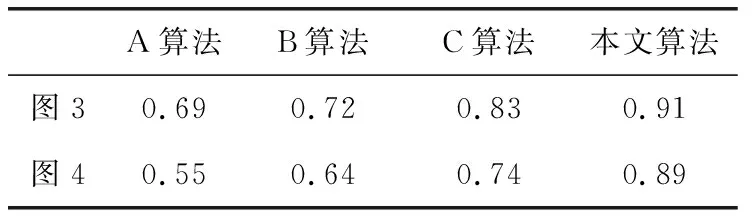
表1 不同算法下的F對(duì)比
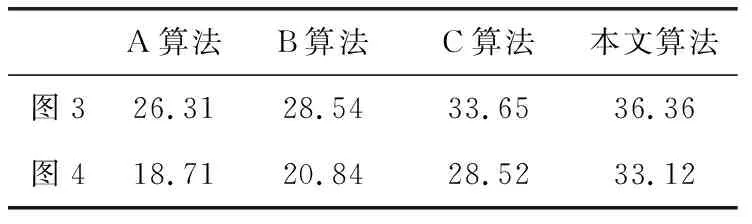
表2 不同算法下的Bad誤差對(duì)比
為了更好說明噪聲對(duì)算法的影響,對(duì)不同噪聲密度下的椒鹽噪聲進(jìn)行多次實(shí)驗(yàn),分別測(cè)量得到的檢測(cè)邊緣的評(píng)價(jià)指標(biāo)F與Bad誤差。以圖3(a)為對(duì)象,通過添加噪聲密度變化范圍為0到0.6,間隔為0.1的椒鹽噪聲,不同算法得到的實(shí)驗(yàn)結(jié)果如圖5所示。根據(jù)圖5得出,本文算法在不同噪聲密度下得到的F和Bad曲線相對(duì)平穩(wěn),說明算法受到噪聲的影響較少,抗噪聲性能優(yōu)良,穩(wěn)定性好。而其它算法在噪聲的影響下,算法得到的結(jié)果曲線變化較大,穩(wěn)定性不佳。
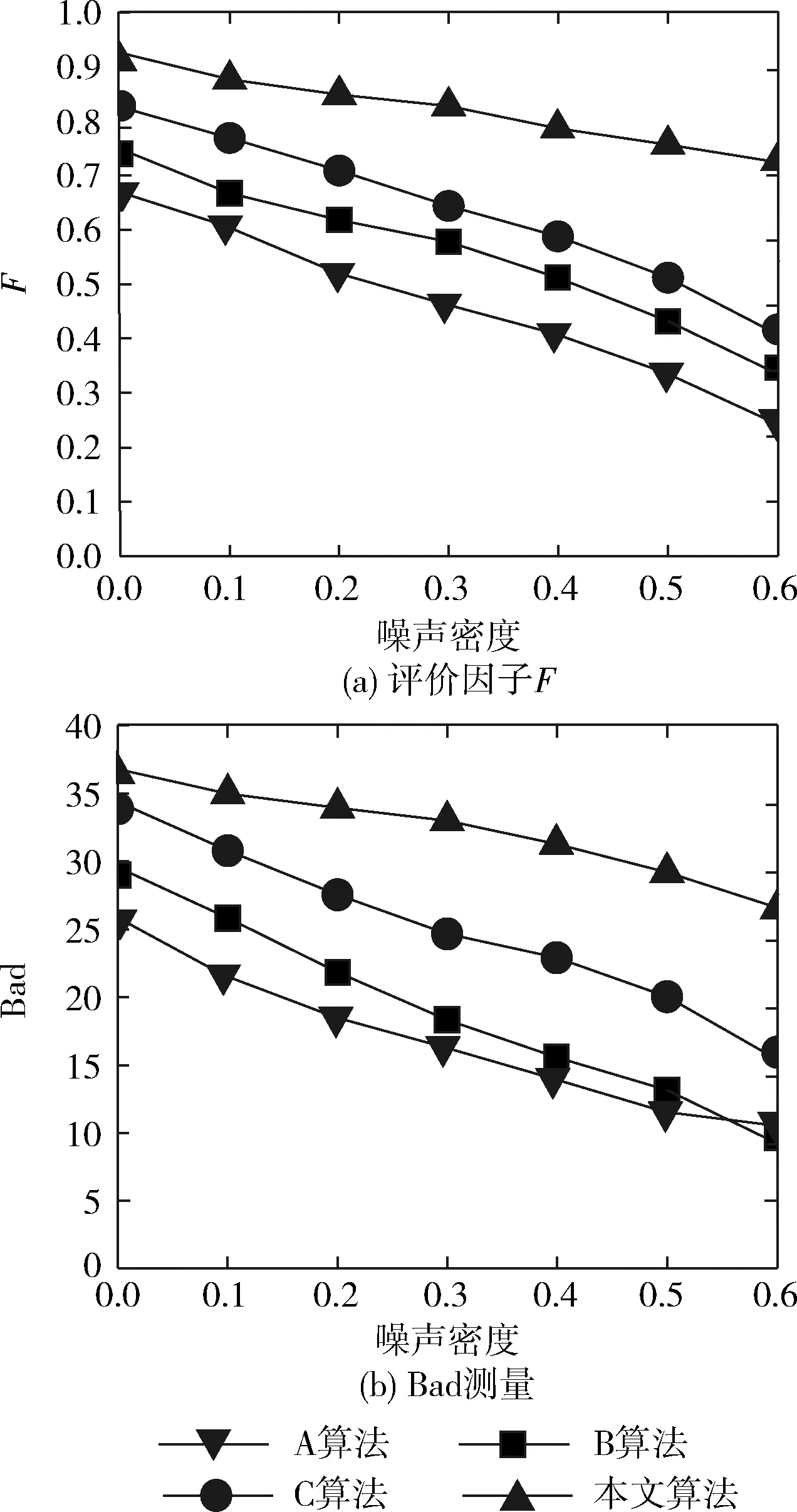
圖5 評(píng)價(jià)因子與Bad誤差測(cè)量
根據(jù)以上實(shí)驗(yàn)與客觀測(cè)量可得出,提出的方法能夠有效對(duì)彩圖邊緣提取。并且對(duì)含噪聲的情況下仍具有較好的表現(xiàn),提取邊緣清晰、完整,對(duì)低照度與細(xì)節(jié)區(qū)域邊緣能夠有效捕抓。主要是本文采用了一種自適應(yīng)VTV模型對(duì)圖像降噪,能夠有效降低噪聲影響。對(duì)于彩圖,轉(zhuǎn)換為CIELAB,并計(jì)算其色差和方向,利用NMS對(duì)邊緣細(xì)化。再通過自適應(yīng)DT法提取彩圖邊緣,提高了邊緣定位精度。而A算法中無噪聲圖像提取性能較好,但是在含噪聲彩色圖像中效果不理想,Canny無法對(duì)邊緣和噪聲很好區(qū)分。B算法根據(jù)色調(diào)圖像的梯度消除偽邊緣,對(duì)弱邊緣提取不佳。C算法中通過形態(tài)學(xué)梯度算子,計(jì)算圖像HSI這3個(gè)通道的邊緣信息,再加權(quán)得到彩圖邊緣,對(duì)邊緣提取效果較好。但HSI這3個(gè)通道權(quán)重計(jì)算困難,對(duì)邊緣影響較大。
4 結(jié)束語
彩圖具有豐富的信息,為了改善彩圖邊緣提取的性能,提高在低對(duì)照度與細(xì)節(jié)區(qū)域邊緣提取能力,提出了一種基于自適應(yīng)VTV與色差的邊緣提取方法。為了有效降低噪聲影響,防止去噪的同時(shí)邊緣產(chǎn)生平滑,定義了自適應(yīng)VTV去噪模型,兼顧了去噪聲與邊緣平滑關(guān)系。為了提高彩圖邊緣提取能力,首先將其變換為CIELAB空間,并計(jì)算CIELAB的色差和方向。對(duì)于不同色差和方向,采用不同的Sobel算子,運(yùn)用NMS對(duì)彩圖的細(xì)化,搜索圖像中的可能邊緣點(diǎn)。再通過自適應(yīng)DT提取彩色圖像邊緣。實(shí)驗(yàn)結(jié)果表明了提出的方法能夠有效對(duì)彩圖邊緣提取,并且具有良好的抗噪性。對(duì)低照度與細(xì)節(jié)區(qū)域仍具有較強(qiáng)的提取能力,魯棒性強(qiáng),具有一定的實(shí)用性。
參考文獻(xiàn):
[1]LI Minhua,BAI Meng,LV Yingjun.Adaptive thresholding based edge detection approach for images[J].Pattern Recognition and Artificial Intelligence,2016,29(2):177-184(in Chinese).[李敏花,柏猛,呂英俊.自適應(yīng)閡值圖像邊緣檢測(cè)方法[J].模式識(shí)別與人工智能,2016,29(2):177-184.]
[2]Tsai P,Chang C C,Hu Y C.An adaptive two-tage edge detection scheme for digital color image[J].Real-Time Imaging,2014,8(4):329-343.
[3]YANG Tingting,GU Meihua,ZHANG Weichuan.Review of color image edge detection algorithms[J].Application Research of Computers,2015,32(9):2566-2571(in Chinese).[楊婷婷,顧梅花,章為川.彩色圖像邊緣檢測(cè)研究綜述[J].計(jì)算機(jī)應(yīng)用研究,2015,32(9):2566-2571.]
[4]ZHANG Heng,TAN Xiaoyang,JIN Xin.Multi-view clustering based natural image contour detection[J].Pattern Recognition and Artificial Intelligence,2016,29(2):163-170(in Chinese).[張衡,譚曉陽,金鑫.基于多視圖聚類的自然圖像邊緣檢測(cè)[J].模式識(shí)別與人工智能,2016,29(2):163-170.]
[5]Zhang Y,Hu D,Zhang K,et al.Hopfield neural network and its applications on image edge detection[J].Chinese Opt Lett,2014,2(4):213-216.
[6]Wang G,Xiao L,He A.An improved computing method for the image edge detection[J].Chinese Opt Lett,2014,5(2):79-81.
[7]LI Wenping,WANG Zhengming,XIE Meihua.Vectorial total variation model for multi-hannel SAR image denoising[J].Journal of Infrared Millimeter Waves,2014,31(1):61-66(in Chinese).[李文屏,王正明,謝美華.多通道SAR圖像濾波的向量總變分模型[J].紅外與毫米波學(xué)報(bào),2014,31(1):61-66.]
[8]Chambolle A.An algorithm for total variation minimization and applications[J].Math Imaging Visual,2015,20(4):89-97.
[9]Chambolle A,Lions P L.Image recovery minimization and related problems[J].IEEE Trans on Image Processing,2016,76(5):167-188.
[10]LIU Huixing,LIU Yi.JPEG image steganalysis based on feature fusion and sparse representation[J].Modern Electronics Technique,2015,38(7):77-80(in Chinese).[劉慧興,劉毅.基于特征融合稀疏表示的JPEG隱寫分析[J].現(xiàn)代電子技術(shù),2015,38(7):77-80.]
[11]Zeng Jun,Li Dehua.Color image edge detection method using VTV denoising and color difference[J].Optik-International Journal for Light and Electron,2013,123(19):2072-2075.
[12]DUAN Jun,GAO Xiang.Adaptive statistical filtering double thresholds based on improved canny operator edge detection algorithm[J].Laser Tournal,2015,36(1):10-13(in Chinese).[段軍,高翔.基于統(tǒng)計(jì)濾波的自適應(yīng)雙閾值改進(jìn)Canny算子邊緣檢測(cè)算法[J].激光雜志,2015,36(1):10-13.]
[13]FU Yu.Color design for medicine packaging based on CIELab[J].Packaging Engineering,2015,36(6):37-40(in Chinese).[付彧.基于CIELab的藥品包裝色彩設(shè)計(jì)研究[J].包裝工程,2015,36(6):37-40.]
[14]LEI Tao,FAN Yangyu,WANG Yi.Edge detection based on modified visual perceptual model for color image[J].Journal of Electronics,2013,41(10):1903-1910(in Chinese).[雷濤,樊養(yǎng)余,王毅.基于視覺感知模型修正的彩色圖像邊緣檢測(cè)[J].電子學(xué)報(bào),2013,41(10):1903-1910.]
[15]ZHANG Qiang,ZHANG Chenbin,CHEN Zonghai.A simplified non maximum suppression with improved constraints[J].Journal of University of Science and Technology of China,2016,46(1):6-11(in Chinese).[張強(qiáng),張陳斌,陳宗海.一種改進(jìn)約束條件的簡(jiǎn)化非極大值抑制[J].中國(guó)科學(xué)技術(shù)大學(xué)學(xué)報(bào),2016,46(1):6-11.]
[16]Shih M Y,Tseng D C.Wavelet-based multiresolution edge detection and tracking[J].Image and Vision Computing,2015,23(4):441-451.
[17]Claudia M?hler,Christina J?rns,Ellen Radtke.Opportunities and limitations of training working memory in children with and without reading and writing disabilities[J].Zeitschrift für Erziehungswissenschaft,2015,18(3):453-471.