基于偏振光傳感器的全姿態(tài)角解算方法研究*
2018-06-15 07:56:02,,,,
單片機(jī)與嵌入式系統(tǒng)應(yīng)用 2018年6期
,,,,
(大連理工大學(xué) 遼寧省納米技術(shù)及系統(tǒng)重點(diǎn)實(shí)驗(yàn)室,大連116024)
引 言
導(dǎo)航是指確定當(dāng)前的位置和姿態(tài),控制到達(dá)指定目的地,這一技術(shù)廣泛存在于自然界各種生物的日常活動(dòng)中,協(xié)助生物完成覓食和遷徙等生理活動(dòng)。而且隨著人類(lèi)社會(huì)的不斷發(fā)展和科技的進(jìn)步,越來(lái)越多的導(dǎo)航技術(shù)被發(fā)現(xiàn)及應(yīng)用在各行各業(yè),與人類(lèi)的生活密不可分。現(xiàn)在導(dǎo)航技術(shù)的發(fā)展水平也代表著一個(gè)國(guó)家的現(xiàn)代化程度,是建設(shè)信息化強(qiáng)國(guó)的重要基礎(chǔ),無(wú)論是軍事領(lǐng)域還是民用領(lǐng)域,都有著重要的研究?jī)r(jià)值和意義。
目前,使用廣泛的導(dǎo)航技術(shù)主要包括慣性導(dǎo)航[1]、地磁導(dǎo)航[2]、衛(wèi)星導(dǎo)航和天文導(dǎo)航技術(shù)等。然而各種導(dǎo)航技術(shù)都有各自的優(yōu)點(diǎn)及缺點(diǎn),例如慣性導(dǎo)航技術(shù)是一種完全獨(dú)立自主的技術(shù),不受外界干擾,短時(shí)間內(nèi)具有較高的導(dǎo)航精度,但其由于誤差累計(jì)導(dǎo)致長(zhǎng)時(shí)間導(dǎo)航精度低,不能長(zhǎng)期為載體提供導(dǎo)航信息,因此單獨(dú)使用慣性導(dǎo)航也受到了很大的限制。除了需要對(duì)傳統(tǒng)導(dǎo)航設(shè)備進(jìn)行改進(jìn),研究新型導(dǎo)航技術(shù)及研究不同導(dǎo)航技術(shù)的組合使用有著重要的實(shí)際意義。
偏振光導(dǎo)航技術(shù)是利用天空中穩(wěn)定分布的偏振模式確定載體體軸與太陽(yáng)子午線之間的夾角,用于導(dǎo)航定向的應(yīng)用。太陽(yáng)光在穿過(guò)大氣層時(shí),受到大氣層中空氣分子等散射作用而產(chǎn)出偏振光,形成了穩(wěn)定對(duì)稱(chēng)分布的偏振模式,大自然中的沙蟻、蜻蜓、金龜子等昆蟲(chóng)都是利用偏振模式進(jìn)行導(dǎo)航[3-4]。偏振分布模式是自然界中的固有資源之一,不易受到人為干擾,因此在軍事領(lǐng)域具有廣闊的應(yīng)用前景。
作為一種完全獨(dú)立自主的新型導(dǎo)航技術(shù),偏振光導(dǎo)航還具有無(wú)誤差累計(jì)、精度高、結(jié)構(gòu)簡(jiǎn)單等優(yōu)點(diǎn)。因此在成功研制出偏振光傳感器的基礎(chǔ)上,如何利用偏振光進(jìn)行導(dǎo)航定姿或定位也備受關(guān)注。
現(xiàn)階段偏振光傳感器主要應(yīng)用在以下兩個(gè)方面:一方面是用于確定載體當(dāng)前的位置,但定位精度較低不適合實(shí)際應(yīng)用[5];另一個(gè)方面就是利用偏振光傳感器僅計(jì)算航向角,但現(xiàn)階段主要針對(duì)二維水平方面的研究[6],與無(wú)人機(jī)實(shí)際飛行存在一定的差距。基于目前的研究現(xiàn)狀,本文提出了一種利用偏振光傳感器實(shí)現(xiàn)全姿態(tài)角的方法。
1 全姿態(tài)角解算方法
1.1 航向角的獲取
本文選擇的導(dǎo)航坐標(biāo)系為北東地坐標(biāo)系,定義偏振光傳感器的測(cè)量坐標(biāo)系(m系)如圖1所示。

圖1 偏振光傳感器測(cè)量模型
其中O-XnYnZn即為導(dǎo)航坐標(biāo)系,X軸、Y軸和Z軸分別指向北向、東向和地心方向。定義O點(diǎn)為偏振光傳感器安裝所在位置;Xm軸是偏振光傳感器的參考方向,是偏振光傳感器內(nèi)偏振片安裝的基準(zhǔn)方向;Zm軸為偏振光傳感器的觀測(cè)方向。坐標(biāo)系O-XnYnZn構(gòu)成右手坐標(biāo)系,為避免圖形過(guò)于復(fù)雜,圖中沒(méi)有標(biāo)記Ym軸。φ表示E矢量方向與偏振光傳感器參考方向之間的夾角,即偏振光傳感器的測(cè)量值。S點(diǎn)是太陽(yáng)的投影點(diǎn)。hs和αs分別為太陽(yáng)的高度角和方位角,它們的大小與觀測(cè)位置和觀測(cè)時(shí)間有關(guān),可以根據(jù)下式計(jì)算得到:
(1)
其中,δ為太陽(yáng)赤緯,β為觀測(cè)點(diǎn)的緯度,t為太陽(yáng)時(shí)角,與觀測(cè)點(diǎn)的經(jīng)度有關(guān)。
根據(jù)圖1所示,入射光E矢量方向在m系可以表示為:
(2)
偏振光傳感器的觀測(cè)方向單位化在m系中表示為:
(3)
由于入射光的E矢量始終與觀測(cè)方向和太陽(yáng)入射方向構(gòu)成的平面垂直,即:
(4)
(5)

(6)

(7)
① 當(dāng)γ=θ=0°時(shí),在這種運(yùn)動(dòng)狀態(tài)下,通過(guò)式(6)計(jì)算得到:
(8)
通過(guò)上式進(jìn)一步計(jì)算可得:
(9)
② 當(dāng)γ≠0°或θ≠0°時(shí),在橫滾角或者俯仰角不為零的運(yùn)動(dòng)狀態(tài)下,利用式(6)計(jì)算得到:
令A(yù)=cotφcosθ-sinγsinθ,B=cosγ,C=(cotφsinθ+sinγcosθ)tanhs,計(jì)算得到:
(10)
無(wú)人機(jī)在飛行過(guò)程中,大多數(shù)的運(yùn)動(dòng)狀態(tài)工作在橫滾角與俯仰角不為零的情況下,根據(jù)上式可知,此時(shí)航向角的解算不能僅由偏振角和太陽(yáng)方位角計(jì)算得到,還與橫滾角和俯仰角的大小有關(guān)。
1.2 俯仰角與橫滾角的獲取
太陽(yáng)投影點(diǎn)在導(dǎo)航坐標(biāo)系和機(jī)體坐標(biāo)系的關(guān)系如圖2所示。其中O-XnYnZn表示導(dǎo)航坐標(biāo)系,O-XbYbZb表示集體機(jī)體坐標(biāo)系,外面的半球表示以導(dǎo)航坐標(biāo)系觀測(cè)得到的天球模型,Sn為太陽(yáng)在該天球模型上的投影點(diǎn),可以表示為:



圖2 太陽(yáng)在不同坐標(biāo)系中投影示意圖
當(dāng)機(jī)體坐標(biāo)系與導(dǎo)航坐標(biāo)系重合時(shí),太陽(yáng)在兩個(gè)坐標(biāo)系的投影點(diǎn)相同。當(dāng)兩個(gè)坐標(biāo)系不重合時(shí),即此時(shí)的姿態(tài)角不為零時(shí),太陽(yáng)在導(dǎo)航坐標(biāo)系和機(jī)體坐標(biāo)系的投影點(diǎn)不同,可以分別計(jì)算太陽(yáng)在不同坐標(biāo)系中的投影點(diǎn),根據(jù)投影點(diǎn)計(jì)算坐標(biāo)系之間的姿態(tài)關(guān)系,進(jìn)而可以計(jì)算俯仰角與橫滾角。
太陽(yáng)在兩個(gè)坐標(biāo)系中投影存在如下關(guān)系:
(11)
將上式展開(kāi)可得:
根據(jù)式(11)可知,若已知Sb與Sn的大小,利用上一小節(jié)可計(jì)算出當(dāng)前的航向角,通過(guò)解算上式可求得當(dāng)前的俯仰角與橫滾角,即實(shí)現(xiàn)全姿態(tài)角的解算。
根據(jù)式(1),若已知當(dāng)前觀測(cè)位置的經(jīng)緯度和時(shí)間,通過(guò)這兩個(gè)公式可計(jì)算出太陽(yáng)矢量在導(dǎo)航坐標(biāo)系中的投影Sn。
根據(jù)瑞利散射模型可知,天空中任意一點(diǎn)的E矢量方向總是垂直于觀測(cè)方向和太陽(yáng)矢量方向組成的平面,因此太陽(yáng)方向矢量也垂直于任意兩點(diǎn)E矢量方向(不平行)組成的平面,則可以通過(guò)解算E矢量方向求解太陽(yáng)方向矢量在機(jī)體坐標(biāo)系中的投影Sb,解算方法示意圖如圖3所示。其中O點(diǎn)是觀測(cè)點(diǎn),O-XmYmZm坐標(biāo)系是偏振光傳感器的測(cè)量坐標(biāo)系,S為太陽(yáng)投影點(diǎn),Sm是太陽(yáng)方向矢量在偏振光傳感器測(cè)量坐標(biāo)系中的投影,P1和P2分別是兩個(gè)偏振光傳感器的觀測(cè)方向上的E矢量方向。

圖3 太陽(yáng)方向矢量求解示意圖

利用兩個(gè)點(diǎn)源式偏振光傳感器搭建偏振光傳感器測(cè)量單元模型,利用兩個(gè)偏振光傳感器分別測(cè)量不同方向上的E矢量方向,進(jìn)而計(jì)算太陽(yáng)方向矢量在m系中的投影,測(cè)量單元模型示意圖如圖4所示。其中,平面為A水平面,平面上的坐標(biāo)系O-XYZ是測(cè)量坐標(biāo)系m系。平面B和平面C是偏振光傳感器的安裝面,它們與平面A成45°角設(shè)計(jì),這一設(shè)計(jì)為了方便進(jìn)行E矢量在不同坐標(biāo)系之間的相互轉(zhuǎn)換,坐標(biāo)系O1-X1Y1Z1和坐標(biāo)系O2-X2Y2Z2分別在平面B和平面C上。X1軸和X2軸與Y軸平行,Y1軸和Y2軸與X軸平行。
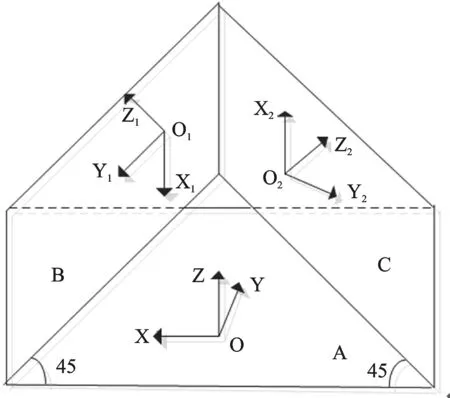
圖4 雙偏振光傳感器測(cè)量單元模型
平面B上的偏振光傳感器測(cè)量到的E矢量方向在坐標(biāo)系O1-X1Y1Z1中的投影P1和平面C上的偏振光傳感器測(cè)量到的E矢量方向在坐標(biāo)系O2-X2Y2Z2中的投影P2如下:
(12)
其中k1和k2的取值可以為1或者-1,這是由于偏振光傳感器存在測(cè)角模糊性造成的。
由于平面B和平面C與平面A的角度關(guān)系固定,因此三個(gè)坐標(biāo)系之間的姿態(tài)轉(zhuǎn)移矩陣也固定不變,分別將投影P1和投影P2通過(guò)姿態(tài)轉(zhuǎn)移矩陣求出兩個(gè)E矢量方向在坐標(biāo)系O-XYZ的投影:
(13)
由此可以求出太陽(yáng)方向矢量在m系中的投影Sm:
Sm=kP1(φ1)P2(φ2)
(14)
其中k=k1k2,可通過(guò)太陽(yáng)的位置判斷其大小。
所以太陽(yáng)方向矢量在b系中的投影Sb為:
(15)
聯(lián)立式(10)和式(11)即可對(duì)航向角、俯仰角及橫滾角進(jìn)行解算,實(shí)現(xiàn)全姿態(tài)角的求解。
2 全姿態(tài)角解算方法
為了驗(yàn)證所提方法的有效性,本文利用Matlab對(duì)該方法進(jìn)行了仿真實(shí)驗(yàn),通過(guò)軌跡發(fā)生器進(jìn)行軌跡的生成并生成理論姿態(tài)角,又因?yàn)辄c(diǎn)源式偏振光傳感器的測(cè)量精度可達(dá)到0.2°,在生成的點(diǎn)源式偏振光傳感器數(shù)據(jù)中加入0.2°的誤差項(xiàng)作為真實(shí)輸出。然后通過(guò)上面描述的方法進(jìn)行姿態(tài)角的解算,通過(guò)比較解算出的測(cè)量值與理論值判斷該方法的可行性。
本文為模擬三維運(yùn)動(dòng)下僅利用偏振光傳感器進(jìn)行全姿態(tài)角解算的有效性,進(jìn)行了下面的簡(jiǎn)單三維仿真實(shí)驗(yàn)。其中航向角固定偏轉(zhuǎn)30°,橫滾角保持水平不變,俯仰角進(jìn)行一定的姿態(tài)變化,從10°變化到0°,簡(jiǎn)單模擬小型無(wú)人機(jī)的起飛過(guò)程。實(shí)驗(yàn)結(jié)果如圖5和圖6所示。
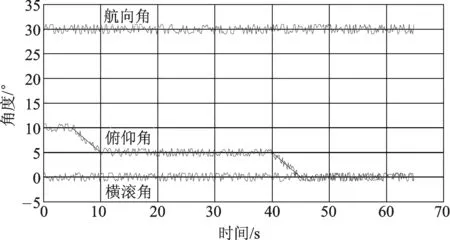
圖5 姿態(tài)角對(duì)比圖
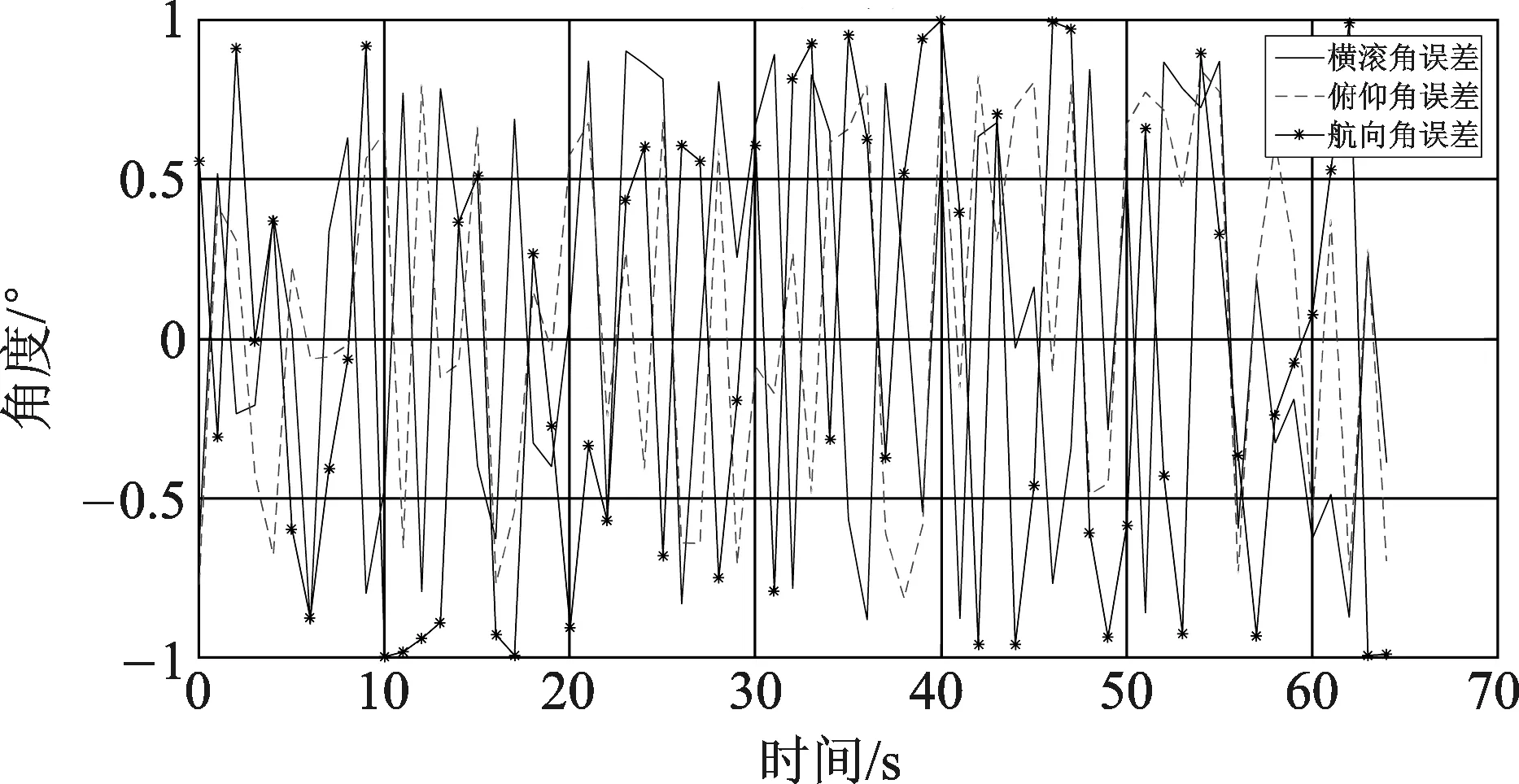
圖6 姿態(tài)角誤差
從圖中可以看出,通過(guò)該方法能夠較準(zhǔn)確地測(cè)量出姿態(tài)角,姿態(tài)角誤差在1°以內(nèi),能夠滿足小型無(wú)人機(jī)的飛行需求。該方法主要在解算過(guò)程中涉及大量的三角函數(shù)的反解,造成解算過(guò)程中誤差的增大,但可通過(guò)提高偏振光傳感器的制造精度以提高姿態(tài)角的解算精度。
結(jié) 語(yǔ)

[1] 朱家海. 慣性導(dǎo)航[M]. 北京:國(guó)防工業(yè)出版社, 2008.
[2] 寇義民. 地磁導(dǎo)航關(guān)鍵技術(shù)研究[D]. 哈爾濱:哈爾濱工業(yè)大學(xué), 2010.
[3] Müller M, Wehner R. Path integration in desert ants, Cataglyphis fortis[J]. Proceedings of the National Academy of Sciences of the United States of America, 1988, 85(14):5287.
[4] Wehner R, Gallizzi K, Frei C, et al. Calibration processes in desert ant navigation: vector courses and systematic search[J]. Journal of Comparative Physiology A, 2002, 188(9):683-693.
[5] 褚金奎, 王洪青, 戎成功,等. 基于偏振光傳感器的導(dǎo)航系統(tǒng)實(shí)驗(yàn)測(cè)試[J]. 宇航學(xué)報(bào), 2011, 32(3):489-494.
猜你喜歡
計(jì)算機(jī)應(yīng)用(2022年2期)2022-03-01 12:33:42
計(jì)算機(jī)應(yīng)用(2022年1期)2022-02-26 06:57:42
計(jì)算機(jī)應(yīng)用(2021年4期)2021-04-20 14:06:36
計(jì)算機(jī)應(yīng)用(2021年3期)2021-03-18 13:44:48
計(jì)算機(jī)應(yīng)用(2021年1期)2021-01-21 03:22:38
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
 單片機(jī)與嵌入式系統(tǒng)應(yīng)用2018年6期
單片機(jī)與嵌入式系統(tǒng)應(yīng)用2018年6期
- 單片機(jī)與嵌入式系統(tǒng)應(yīng)用的其它文章
- ARM微控制器產(chǎn)品平臺(tái)的換型及軟硬件功能移植
- Zynq芯片的三維視頻混沌保密通信系統(tǒng)設(shè)計(jì)
- 智能LED照明需要?jiǎng)?chuàng)新的管控和調(diào)光
- 創(chuàng)新的自適應(yīng)脈寬調(diào)制器為固定通/斷時(shí)間可控的穩(wěn)壓器提供恒定開(kāi)關(guān)頻率
- 嵌入式系統(tǒng)裸機(jī)的任務(wù)調(diào)度應(yīng)用設(shè)計(jì)*
- 基于Kinect圖像識(shí)別的翻書(shū)機(jī)設(shè)計(jì)*