四軸飛行器平臺的WiFi室內(nèi)定位系統(tǒng)研究
2018-06-15 07:56:02,,
單片機(jī)與嵌入式系統(tǒng)應(yīng)用 2018年6期
,,
(武漢紡織大學(xué) 數(shù)學(xué)與計算機(jī)學(xué)院,武漢 430200)
引 言
近年來隨著信息技術(shù)和電子技術(shù)的不斷進(jìn)步,無人機(jī)得到迅猛發(fā)展[1]。其中固定翼在軍用中使用比較多,民用中多旋翼[2-3]應(yīng)用比較廣泛。然而在無人機(jī)應(yīng)用過程中,定位是一個比較重要的問題。在室外,無人機(jī)一般都是使用GPS定位,基本上可以滿足應(yīng)用要求。在室內(nèi),由于受建筑物的影響,GPS信號衰減比較嚴(yán)重,需要另外一種室內(nèi)定位方法[4]。目前室內(nèi)定位方法有:紅外定位、超聲波定位、射頻識別(RFID)定位、WiFi定位[5-6]、藍(lán)牙定位、超寬帶(UWB)定位[7]等,不同的定位方法有各自的優(yōu)缺點(diǎn)。隨著WiFi熱點(diǎn)的越來越普及,WiFi信號基本上無處不在,利用現(xiàn)有的WiFi網(wǎng)絡(luò)進(jìn)行室內(nèi)定位可以極大地減少定位的設(shè)備成本。其它的室內(nèi)定位方法都需要架設(shè)專門的定位網(wǎng)絡(luò),維護(hù)也需要專業(yè)人員。
因此,本文選取的方法是WiFi室內(nèi)定位。在WiFi定位方法中又分為基于信號強(qiáng)度(RSSI)的定位、基于信號角度(AOA)的定位和基于信號時間(TOA和TDOA)的定位[2-4]。AOA的定位對WiFi熱點(diǎn)的位置有較高要求,而基于TOA和TDOA的定位對WiFi發(fā)射方和信號接收方的時間同步有較高的要求。所以本文選擇的是基于加權(quán)的K值最鄰近法(KNN)的位置指紋定位方法[8-9]。使用位置指紋定位方法對WiFi的發(fā)射方和接收方都沒有什么特殊要求,不需要通過信號傳播模型來確定RSSI與距離的映射關(guān)系,這在很大程度上降低了定位難度,但是定位精度較低。所以本文將Kalman濾波[10-12]應(yīng)用于數(shù)據(jù)的采集過程中,以提高位置指紋定位的精度。
1 定位算法
1.1 位置指紋算法
位置指紋定位作為一種與距離無關(guān)的定位算法,主要分為兩個階段:離線采樣階段和在線定位階段。離線采樣階段:其目標(biāo)在于建立一個位置特征數(shù)據(jù)庫,定位系統(tǒng)部署人員在定位環(huán)境中遍歷所有位置,同時在每個參考位置收集來自不同AP接入點(diǎn)的RSSI值,將各個AP的MAC地址、RSSI值和參考點(diǎn)的位置信息組成一個相關(guān)聯(lián)的三元組數(shù)據(jù)保存在位置特征庫中。在線定位階段:定位用戶在定位區(qū)域中,實時采集所有AP接入點(diǎn)的RSSI值,并將MAC地址和RSSI值組成二元組作為實時定位數(shù)據(jù),按照一定的順序遍歷特征庫,估算出當(dāng)前位置。
位置指紋定位算法具體操作是將在不同位置上的信號強(qiáng)度信息S(x1,x2,x3,…,xn)和坐標(biāo)信息D(x,y)對應(yīng):
F′(S(x1,x2,x3,…,xn))=D(xi,yi)
(1)
組合成位置指紋,在實驗區(qū)[XN,YN]內(nèi)離散地采集實驗點(diǎn)D(xi,yi)的強(qiáng)度信息S(x1,x2,x3,…,xn),將所有點(diǎn)的數(shù)據(jù)收集建立位置指紋庫F:
F(S(x1,x2,x3,…,xn))=Σ[XN,YN]D(xi,yi)
(2)
指紋庫F中S(x1,x2,x3,…,xn)與D(x,y)一一對應(yīng),通過實時采集的待測點(diǎn)的信號強(qiáng)度與指紋庫中的數(shù)據(jù),根據(jù)一定的匹配算法實現(xiàn)定位。位置指紋定位算法又主要分為確定型和概率型兩大類。前者計算量小,但是定位精度低;后者定位精度高,但是計算量大。考慮到應(yīng)用于四軸飛行器上,需要進(jìn)行快速定位,所以本文選擇確定型的位置指紋定位算法。
1.2 KNN匹配算法
確定性定位算法是一種基于KNN的匹配算法。本文為提高算法的定位精度,選擇的是基于加權(quán)的KNN匹配算法。該算法實質(zhì)是計算待測點(diǎn)信號強(qiáng)度與指紋庫中樣本點(diǎn)信號強(qiáng)度的歐式距離,取K個最近點(diǎn),讓這K個最近點(diǎn)取不同的權(quán)值,從而估算出最終結(jié)果。假設(shè)用于測量的WiFi熱點(diǎn)數(shù)量為n,樣本點(diǎn)個數(shù)為N,待測點(diǎn)為A,則A點(diǎn)與指紋庫中單個樣本的歐式距離dj為:
(3)
其中j=1,2,…,N,ss表示待測點(diǎn)所測得WiFi熱點(diǎn)的信號強(qiáng)度,SSi表示指紋庫中樣本的信號強(qiáng)度。在測得A點(diǎn)與指紋庫中的所有樣本的歐式距離后,選擇K個最小的歐式距離的樣本點(diǎn)。計算這K個樣本點(diǎn)的權(quán)重,如式(4)所示:
(4)
則待測點(diǎn)A的測量坐標(biāo)(x,y)為:
(5)
在使用位置指紋定位算法時,默認(rèn)數(shù)據(jù)源都是真實的,但如果數(shù)據(jù)源不準(zhǔn)確將會對后續(xù)步驟產(chǎn)生嚴(yán)重的影響。尤其在建立指紋庫時,導(dǎo)致指紋庫中的樣本不準(zhǔn)確,從而使定位精度下降。所以本文將會從數(shù)據(jù)的采集階段對位置指紋算法進(jìn)行改進(jìn)。
1.3 算法改進(jìn)
WiFi信號非常容易受環(huán)境因素的影響,由于受障礙物的阻擋,WiFi信號會發(fā)生折射和衍射等多徑傳播、多址傳播,導(dǎo)致同一位置的不同時間所測得的RSSI都有或大或小的擾動,從而影響定位精度。在實驗中無物體擾動的環(huán)境下,每1 s采集一次強(qiáng)度值,共采集400組數(shù)據(jù)。測得信號強(qiáng)度的極差為5 dB,如圖1所示,其中橫坐標(biāo)為測量次數(shù),縱坐標(biāo)為信號強(qiáng)度值。如果在有物體擾動的情況下,信號強(qiáng)度波動的極差將會變得更大。如圖2濾波前信號強(qiáng)度的極差為25。
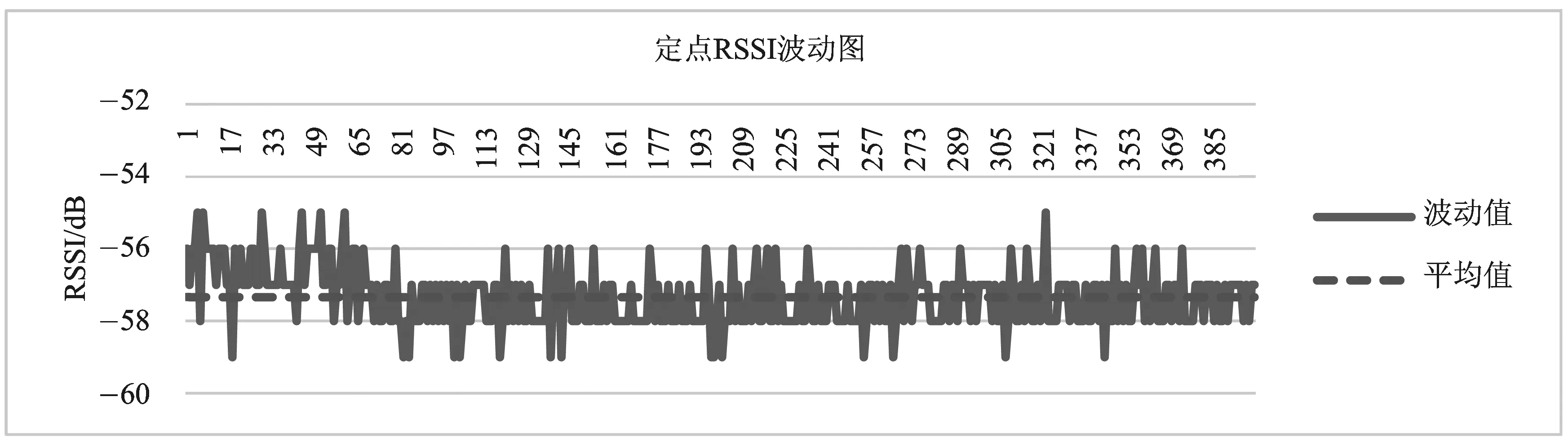
圖1 RSSI波動圖
由于本文的應(yīng)用平臺為四軸飛行器,在飛行的過程中對WiFi信號的擾動比較大,還有可能受其它因素影響,如果直接使用采集的數(shù)據(jù)建立指紋庫和定位,會使準(zhǔn)確性產(chǎn)生較大影響。如圖2中濾波前數(shù)據(jù)就是在有干擾下所測得信號的強(qiáng)度值,所以需要對采集的數(shù)據(jù)進(jìn)行平滑處理。
對此有兩種處理方案:第一種是設(shè)置閾值,信號強(qiáng)度超出閾值的數(shù)據(jù)直接刪除重新采集[13];第二種是將信號強(qiáng)度數(shù)據(jù)直接經(jīng)過濾波平滑處理。前者測到的數(shù)據(jù)會更加接近真實值,但是采集的數(shù)據(jù)可能會一直超出閾值,系統(tǒng)一直處在采集數(shù)據(jù)的過程中。后者采集數(shù)據(jù)的真實性沒有前者高,但是數(shù)據(jù)處理速度更快。所以本文的改進(jìn)方案是在數(shù)據(jù)的采集過程中加入Kalman濾波。
Kalman濾波器是一種最優(yōu)狀態(tài)估計方法,通過輸出和輸入觀測數(shù)據(jù),求系統(tǒng)狀態(tài)的最優(yōu)估計。
基本步驟為:
① 確定Kalman濾波相關(guān)參數(shù);
② 建立指紋庫時,采集30組數(shù)據(jù)并經(jīng)過Kalman濾波;
③ 濾波后的數(shù)據(jù)取平均值作為最終值存入指紋庫中;
④ 定位時,采集10組數(shù)據(jù)并經(jīng)過Kalman濾波;
⑤ 濾波后的數(shù)據(jù)取平均值作為最終定位的值。
實驗中利用四軸飛行器平臺,在有人為擾動的情況下采集了76次數(shù)據(jù),如圖2所示。其中虛線是原始值,實線為濾波后的值,橫坐標(biāo)為采集次數(shù),縱坐標(biāo)為信號強(qiáng)度。從圖中可以看出經(jīng)過濾波后可以很好地對一些跳變值進(jìn)行平滑處理。
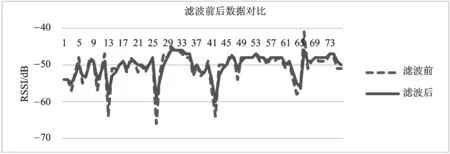
圖2 RSSI濾波圖
在Kalman濾波參數(shù)確定過程中,主要需要確定的參數(shù)有:系統(tǒng)狀態(tài)量A、測量系統(tǒng)參數(shù)H和測量方差R。本文通過采集一定時間的WiFi信號強(qiáng)度值,然后求其方差來確定R的值。通過取不同的值查看濾波效果來最終確定A和H的值。所以可以通過確定系統(tǒng)狀態(tài)量A和測量系統(tǒng)參數(shù)H來調(diào)整濾波的效果。
2 實驗結(jié)果與分析
本文使用的四軸飛行器平臺為Crazepony四軸飛行器,Crazepony是一款軟硬件都開源的迷你四軸飛行器,適合在室內(nèi)使用。WiFi熱點(diǎn)使用的4個是ESP8266 WiFi模塊。還有一塊STM32103最小系統(tǒng)板用作數(shù)據(jù)采集和處理。在實驗時進(jìn)行兩次測試,一次有濾波,另一次沒有濾波。
2.1 指紋庫的建立與實時定位
實驗區(qū)域為7 m×8 m的空間,每隔1 m設(shè)定一個采樣點(diǎn),總共設(shè)置了42個樣本點(diǎn)。WiFi熱點(diǎn)分別放在四周。樣本空間分布圖如圖3所示。在樣本點(diǎn)每秒測量1次,測量30次再取平均值作為該樣本的最終信號強(qiáng)度記錄在指紋庫中。在建立指紋庫時,分別建立一個沒有使用濾波的指紋庫和使用了濾波的指紋庫。

圖3 樣本空間分布圖
在實時定位時,讓四軸飛行器在分別飛到A(3,2)、B(2,6.5)、C(5,5)、D(3.5,3.5)四點(diǎn)進(jìn)行定位測試。采集10次數(shù)據(jù)取平均值作為定位的信號強(qiáng)度值。
2.2 結(jié)果與分析
在沒有使用濾波的情況下,進(jìn)行指紋庫的建立和實時定位。在A、B、C、D四點(diǎn)分別進(jìn)行了10次定位測試,從表1可以看到,定位的平均誤差為2.62 m。從圖4可以看出,在實驗過程中由于受環(huán)境擾動的影響,10次試驗的定位誤差有明顯的波動。4個點(diǎn)中最大誤差的極差為1.26 m。
使用Kalman濾波后,再進(jìn)行指紋庫建立和實時定位。從表1可以看到,定位的平均誤差為2.12 m。而從圖4中可以看到在4個點(diǎn)上的10次的實驗結(jié)果變化比較平緩,實驗誤差的最大極差值為0.4 m。
從有濾波和沒有濾波的兩次實驗可以看出,在數(shù)據(jù)采集過程中,添加Kalman濾波后對定位誤差的波動有一定的抑制作用,而且對比兩次實驗結(jié)果,加入濾波后定位精度有了一定的提高。
定位誤差的折線圖如圖4所示,實線加了濾波,虛線沒有濾波,其中橫坐標(biāo)是定位次數(shù),縱坐標(biāo)是定位誤差。
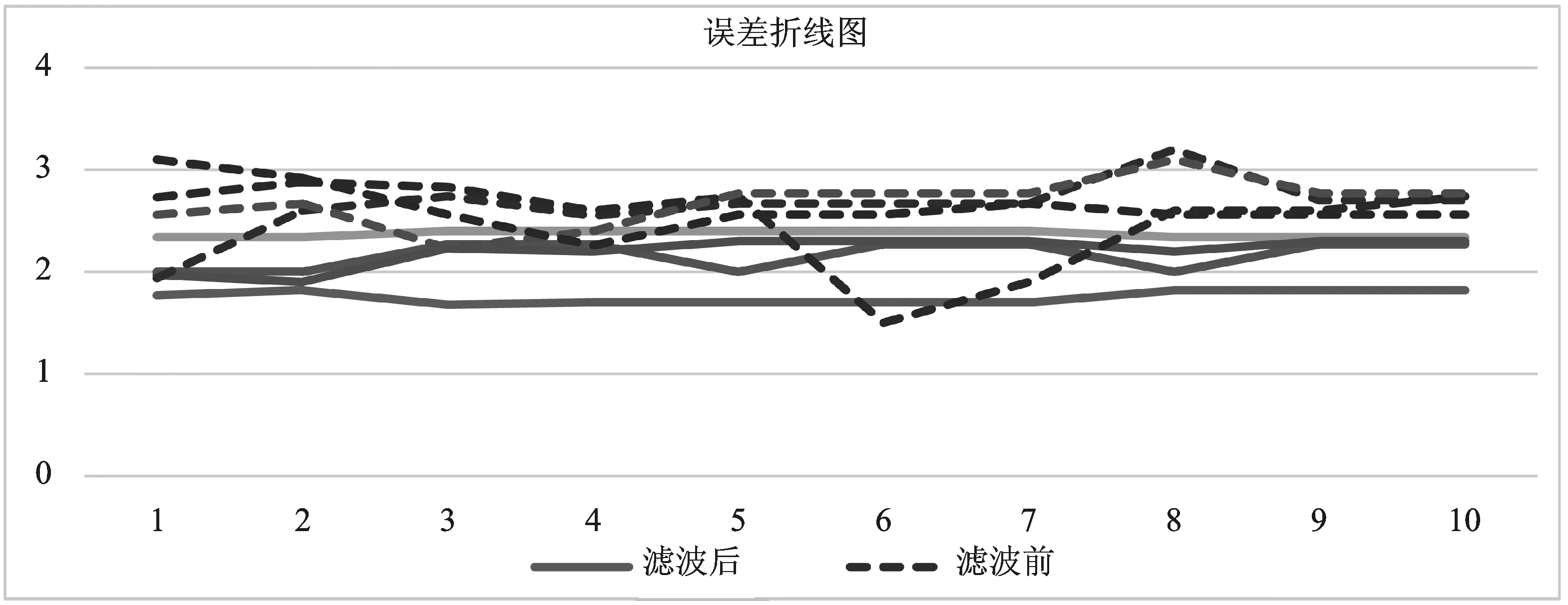
圖4 定位誤差折線圖
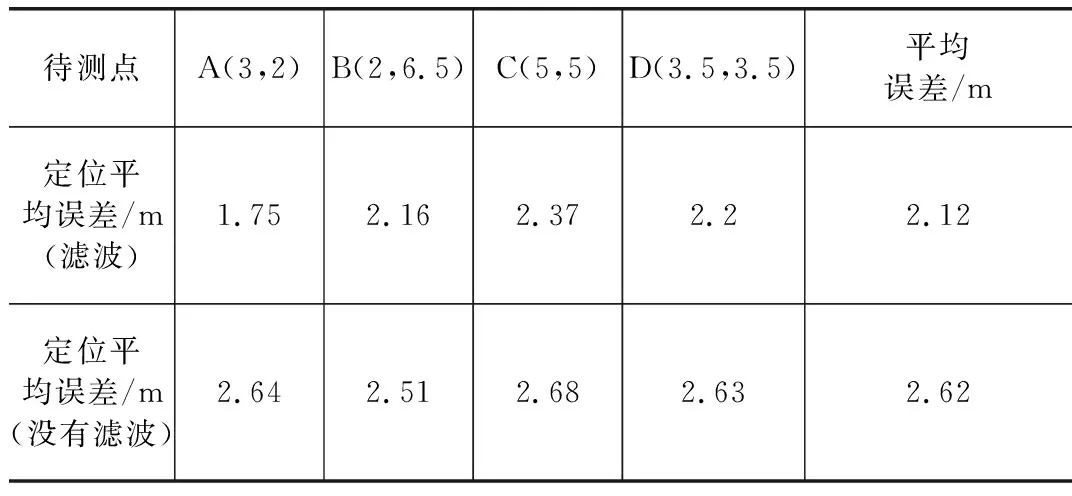
待測點(diǎn)A(3,2)B(2,6.5)C(5,5)D(3.5,3.5)平均誤差/m定位平均誤差/m(濾波)1.752.162.372.22.12定位平均誤差/m(沒有濾波)2.642.512.682.632.62
結(jié) 語

[1] 王春賀.四軸無人機(jī)在武警部隊的應(yīng)用淺析[J].讀書文摘,2016(4).
[2] 吳強(qiáng).警用無人機(jī)引發(fā)的現(xiàn)實思考[J].中國人民公安大學(xué)學(xué)報:自然科學(xué)版,2015(2).
[2] 王大鵬,王茂森,戴勁松,等.四旋翼飛行器懸停建模及控制[J].兵工自動化,2017(5).
[3] Castillo P,Dzul A,Lozano R.Real-time stabilization and tracking of a four-rotor mini rotorcraft[J].IEEE Transactions on Control Systems Technology,2004,12(4):510-516.
[4] 張明華.基于WLAN的室內(nèi)定位技術(shù)研究[D].上海:上海交通大學(xué),2009:36-38.
[5] 楊志紅.基于WiFi室內(nèi)無線定位技術(shù)的研究[D].天津:天津工業(yè)大學(xué),2012:8-10.
[6] 潘立波.基于 Wifi 技術(shù)的無線定位算法研究與實現(xiàn)[D].杭州:浙江大學(xué),2013:1-75.
[7] Jiménez R A R,Seco G F.Comparing Ubisense,Be Spoon,and Deca Wave UWB Location Systems:Indoor Performance Analysis.IEEE Transactions on Instrumentation and Measurement,2017.
[8] 盧恒惠,劉興川,張超,等.基于三角形與位置指紋識別算法的WiFi定位比較[J].移動通信,2010(10).
[9] 吳澤泰,蔡仁欽,徐書燕,等.基于K近鄰法的WiFi定位研究與改進(jìn)[J].計算機(jī)工程,2017,43(3).
[10] Zhou Yong,Li Youwen,Xia Shixiong.An Improved KNN Text Classification Algorithm Based on Clustering[J].Journal of Computers,2009,4(3):230-237.
[11] Woods J W,Radewan C H.Kalman Filtering in Two Dimensions.IEEE Transactions on Information Theory,1977.
[12] Kalman RE.A new approach to linear filtering and predictionproblems.Transactions of the ASME-Journal of Basic Engineering,1960.
[13] 魏菲,李允俊,金華.使用位置指紋算法的WiFi定位系統(tǒng)設(shè)計[J].單片機(jī)與嵌入式系統(tǒng)應(yīng)用,2014(5).
