爬壁機器人創新設計
2018-06-13 08:03:16黃誠駒
機電產品開發與創新 2018年3期
關鍵詞:玻璃幕墻
黃 維,黃誠駒
(武漢職業技術學院,湖北 武漢 430074)
0 引言
機器人技術的不斷發展,越來越多的新型仿生機器人陸續得到發明創造,爬行式機器人漸漸走入了人們的視野中。機器人研究的熱點依舊是那些有特點的運動特性,其中爬行機器人在很多方面得到了應用,可以替代人類完成很多危險性較高的工作,其結構穩定,是一個很好的研究對象。
高樓玻璃幕墻的清掃工作,無論是從工作場景還是從工作性能要求上,都是普通人力難以勝任的工作。設計一款爬壁機器人,其履帶外加電磁及真空吸附盤,支持行進在鋼構與玻璃幕墻之間,并且各方面性能好,續航能力強,抗干擾能力強,還具有一定的自我恢復和保護功能,設計中就必須進行機電融合、跨界創新。
1 創新設計背景
近幾年來,隨著各式各樣的機器人在各個領域中的廣泛應用和發展,爬壁機器人作為能夠在垂直陡壁上進行作業的機器人,以其能夠成為高空極限作業的一種自動機械裝置的優良特性,越來越受到人們的重視。概括起來,爬壁機器人主要可以應用于以下領域:
(1)在建筑行業可應用于噴涂巨型墻面、安裝瓷磚、壁面探傷、壁面修復整容、壁面清洗、擦拭玻璃壁面等。
(2)在消防部門可應用于攜帶消防器械、傳遞救援物資、進行高空救援工作。
(3)在核工業可用于對核廢液儲罐進行視覺檢查、測厚及焊縫探傷等危險的工作。
(4)在石化企業可用于對立式金屬罐或球形罐的內外壁面進行檢查或噴砂除銹、噴漆防腐。
(5)在造船業可用于噴涂船體的內外壁、對船體的內外壁進行檢查、船體內外壁清潔。
(6)在搶險救災上可應用于向高空被困人員運送逃生器械、傳遞食物水給養等。
(7)在航空航天上,可用于太空探索、空間衛星維修等。
由此可見,爬壁機器人的應用領域廣泛涉及民生、核工業、造船工業等,并在這些領域中擔任著十分重要的工作,能夠促進生產力的提高、改善人民的生活與工作條件。
現有技術中爬壁機器人實現對壁面的吸附有三種方式,即真空吸附、磁吸附和推力吸附。真空吸附方式的爬壁機器人通常采用吸盤吸附法,而其行駛機構一般是履帶加多個吸附盤,為了實現行走及吸附需要對多個吸附盤進行氣路控制,利用大氣壓力使機器人吸附在壁面上,現有的氣路控制是每個吸盤與氣泵之間均有單獨的一套吸氣與放氣回路,這種方式使得爬壁機器人的氣路結構太復雜,控制與維修均較麻煩。
2 產品設計方案
2.1 產品設計框架
吸附式履帶爬壁清潔機器人產品設計的框架包括:機架、行駛機構、氣路控制機構。
其中行駛機構包括輪轂、行走帶,行走帶上設有吸盤。氣路控制機構包括主氣管、彈性氣管、環形氣管、支氣管、支撐氣管,吸盤通過支撐氣管設置于行走帶上,支氣管布設于行走帶上,環形氣管套設于行走帶上。
支撐氣管包括吸氣口、放氣口,支撐氣管通過電磁換向閥切換吸氣口與放氣口,支撐氣管的吸氣口與支氣管、環形氣管、彈性氣管、主氣管依次相連,主氣管與氣泵相連,支撐氣管的放氣口與大氣相連。該爬壁機器人的氣路控制機構中的吸氣回路與放氣回路分開,且吸盤共用一個吸氣回路,簡化了氣路結構,使得控制與維修均較方便。
2.2 產品技術方案
吸附式履帶爬壁清潔機器人整體結構包括:機架,行駛機構,氣路控制機構。行駛機構包括:輪轂、行走帶。輪轂包括通過連桿相連的輪轂一、輪轂二,連桿的兩端均設有方向傳感器,支撐氣管上設有角位移傳感器。輪轂一、輪轂二均呈齒輪狀,行走帶的內表面呈鋸齒狀,呈齒輪狀的輪轂一、輪轂二與行走帶的呈鋸齒狀的內表面相嚙合。行走帶上還設有電磁鐵,行駛機構可升降地設置于機架上。吸盤、電磁鐵均以環形陣列地方式設置于行走帶上,吸盤在行走帶的寬度方向上設有兩個環形陣列及以上,電磁鐵在行走帶的寬度方向上設置于相鄰的環形陣列的吸盤中間、在行走帶的圓周方向上與吸盤交錯設置。
3 實例設計及工作原理
下面詳細描述該產品創新設計的過程,并附圖進行詳解,其中以相同或類似的標號表示相同或類似的元件或具有相同或類似功能的元件。這里設計的對象是:吸附式履帶爬壁清潔機器人,其用于清洗玻璃幕墻。
3.1 吸附式履帶爬壁清潔機器人的整體結構設計
(1)機架,機架上設有清洗刷。
(2)行駛機構,包括輪轂、行走帶。輪轂包括通過連桿相連的輪轂一、輪轂二,行走帶繞設于輪轂一、輪轂二上,輪轂一、輪轂二可旋轉地設置于機架上,行走帶上設有吸盤,吸盤設置于行走帶上且沿行走帶環形陣列分布。
(3)氣路控制機構,包括主氣管、彈性氣管、環形氣管、支氣管、支撐氣管,吸盤通過支撐氣管設置于行走帶上,支撐氣管包括吸氣口、放氣口,支撐氣管通過電磁換向閥以切換吸氣口與放氣口,放氣口與大氣連通,吸氣口與支氣管的進氣口相連通,支氣管布設于行走履帶上,環形氣管套設于行走履帶上,支氣管的出氣口與環形氣管的進氣口相連通,環形氣管的出氣口與彈性氣管的進氣口相連通,彈性氣管的出氣口通過萬向連接管與主氣管的進氣口相連,主氣管的出氣口與氣泵相連,萬向連接管設置于連桿上。

圖1 爬壁機器人的整體結構示意圖Fig.1 Schematic diagram of the overall structure of wall climbing robot
3.2 可進行自清洗的清潔刷的工作原理
當需要清潔玻璃幕墻時,將該吸附式履帶爬壁清潔機器人放入玻璃幕墻上,在玻璃幕墻上行走主要依靠吸盤的吸氣與放氣來實現,吸氣時,電磁換向閥使得支撐氣管的吸氣口與支氣管相連通,此時需要吸附到玻璃幕墻上的吸盤中的空氣經吸氣口從支撐氣管依次通過支氣管、環形氣管、彈性氣管、萬向連接管進入主氣管,并被氣泵吸走,從而使得待吸附的吸盤形成真空達到吸附到玻璃幕墻上的目的;放氣時,電磁換向閥使得支撐氣管的放氣口與大氣相連通從而實現待脫離的吸盤放氣達到脫離玻璃幕墻的目的。該爬壁機器人需要前進時,前面吸附的吸盤陸續放氣脫離玻璃幕墻,與此同時,后面又陸續有新的吸盤通過吸氣吸附到玻璃幕墻,隨著輪轂不斷旋轉,行走帶從而帶著其上不同的吸盤時而吸附時而脫離,從而完成該爬壁機器人的行走。當到達玻璃幕墻需要清潔的區域時,行駛機構停止行進,此時通過清潔刷對等清潔區域進行清潔清。
該吸附式履帶爬壁清潔機器人通過氣路控制機構實現吸盤的吸氣與放氣,從而達到行駛機構前進的目的,該氣路控制機構將吸盤的吸氣回路與放氣回路分開,多個吸盤各自通過支撐氣管與大氣相連來實現放氣,多個吸盤通過同一個環形氣管、彈性氣管、萬向連接管、主氣管與氣泵相連實現吸氣,該氣路控制機構簡化了氣路連接、且控制方便。
在圖2行駛機構的結構示意圖中,連桿的兩端均設有方向傳感器,支撐氣管上設有角位移傳感器。當方向傳感器檢測到與角位移傳感器形成吸氣夾角時,此時與該角位移傳感器相對應的吸盤進入吸氣模式,即其準備吸附到幕墻;當方向傳感器檢測到與角位移傳感器形成放氣夾角時,此時與該角位移傳感器相對應的吸盤進入放氣模式,即其準備脫離幕墻。方向傳感器與角位移傳感器的共同作用使得行駛機構行走得更靈敏。
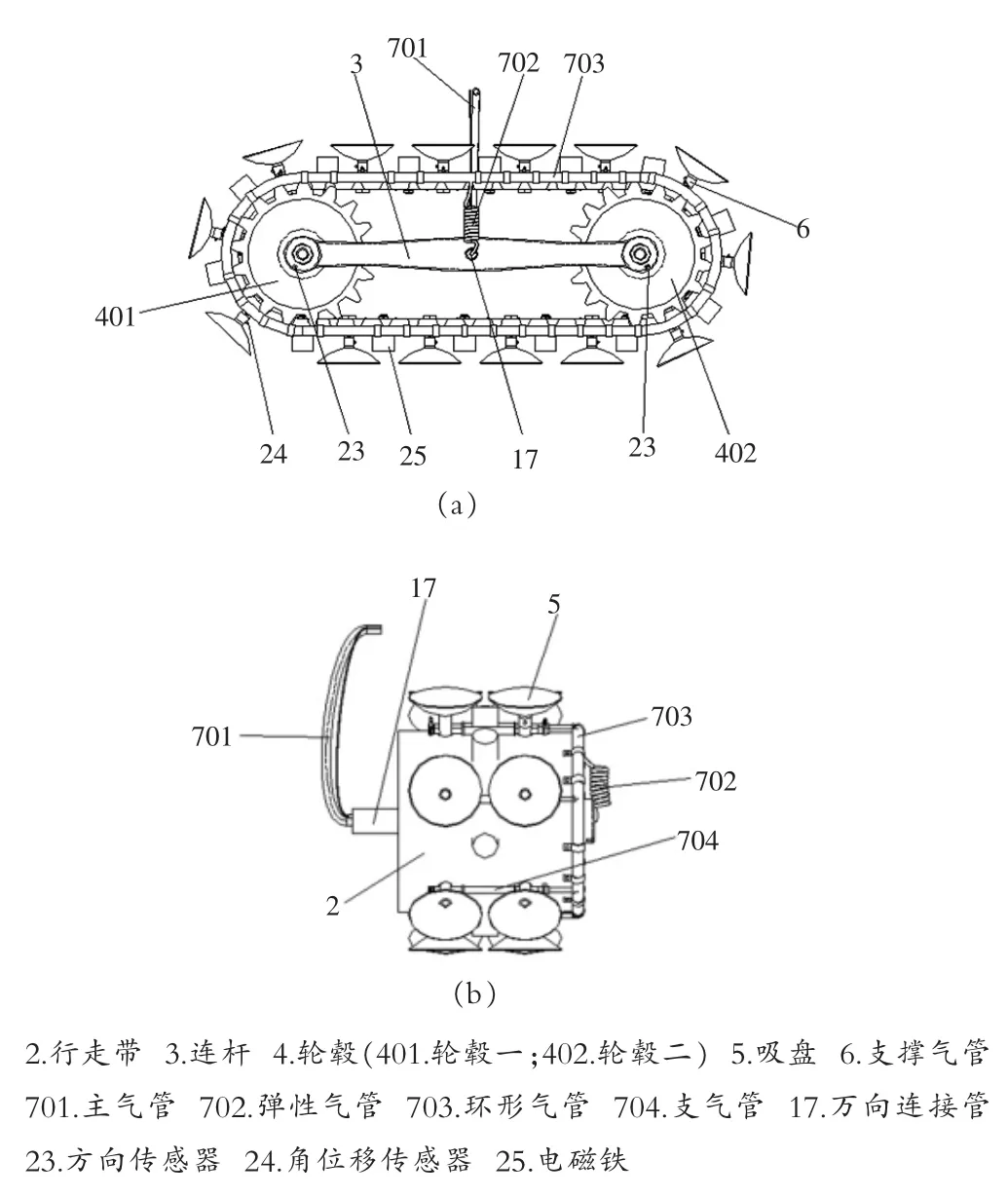
圖2 行駛機構的結構示意圖Fig.2 Schematic diagram of the structure of driving mechanism
輪轂一、輪轂二均呈齒輪狀,行走帶的內表面呈鋸齒狀,呈齒輪狀的輪轂一、輪轂二與行走帶的呈鋸齒狀的內表面相嚙合。該結構使得輪轂與行走帶嚙合得更緊,從而增強行使機構的安全性與可靠性。
行走帶上還設有電磁鐵,行駛機構可升降地設置于機架上。行走帶上同時設有吸盤與電磁鐵,使得該爬壁機器人不僅能在玻璃幕墻上行走,其也可以在金屬材質的幕墻上行走;行駛機構可升降地設置于機架上,不僅能方便地實現該吸附式履帶爬壁清潔機器人的轉向,而且在遇到不平整的幕墻時行駛機構可進行自動調整以保證整機的平穩。
吸盤、電磁鐵均以環形陣列地方式設置于行走帶上,吸盤在行走帶的寬度方向上設有兩個環形陣列,電磁鐵在行走帶的寬度方向上設置于相鄰的環形陣列的吸盤中間、在行走帶的圓周方向上與吸盤交錯設置。該結構使得單獨使用吸盤吸附或電磁鐵吸附時二者互不干擾,提高了吸附的安全性。
本實例中的吸附式履帶爬壁清潔機器人的行走帶上同時包括吸盤與電磁鐵,從設計角度來說,行走帶上也可以只有吸盤。
4 結束語
在人工智能的時代背景下,機器人是一項熱點,人們越來越多的采用機器人來替代人類的工作,尤其是在工作強度大、重復性強、危險性高相關的領域里,機器人得到越來越多的應用,我們可以以此為切入點,結合機器人的結構特點進行產品創新設計。
(本文所屬的系列產品設計已獲得的國家專利有:專利號201610284763.2,一種發明專利,發明名稱為“一種吸附式履帶爬壁清潔機器人”;專利號201620388036.6,一種實用新型專利,發明名稱為“一種可進行自清洗的清洗刷”;專利號201620388594.2,一種實用新型專利,發明名稱為“一種爬壁機器人”;專利號201620388610.8,一種實用新型專利,發明名稱為“一種可自由轉向的爬壁機器人”)
[1]Karl T Ulrich,Steven D Eppinger.Product design and development[M].McGraw-Hill Education,2012.
[2]彭春江,武利生,李元宗.履帶式機器人運動學分析[J].太原:太原理工大學學報,2004.
[3]馬俊峰,唐立平.氣動爬行機器人設計[J].北京:液壓與氣動,2010.
[4]成偉明,唐振民,趙春霞.微小型履帶式機器人路徑跟蹤控制器設計[J].北京:計算機工程與應用,2007.
猜你喜歡
建材發展導向(2023年10期)2023-05-19 07:29:26
建材發展導向(2022年23期)2022-12-22 07:31:46
建材發展導向(2021年15期)2021-11-05 08:21:58
建材發展導向(2021年16期)2021-10-12 05:39:52
建材發展導向(2021年11期)2021-07-28 06:58:00
建材發展導向(2021年10期)2021-07-16 07:14:20
上海建材(2019年3期)2019-09-18 01:50:52
建材發展導向(2019年10期)2019-08-24 06:26:00
中國建筑金屬結構(2019年6期)2019-07-08 03:39:14
上海建材(2018年4期)2018-11-13 01:08:54
