激光半主動導引頭數字控制器的設計與研究
2018-06-13 06:52:04辜磊
現代計算機 2018年14期
關鍵詞:信號
辜磊
(中國礦業大學銀川學院,銀川 750000)
0 引言
半主動激光制導武器是六十年代初發展起來的一門新技術。由于它具有一些優越的特性,如制導精度高、抗干擾能力強、結構簡單、成本低、是一種新的有效的制導體制,所以在武器制導系統中被廣泛應用。總體來說半主動激光制導是由一個外部的激光發射源將特定波長的激光照射到目標物體上,由于目標表面不平整,激光產生漫反射,而由目標物體漫反射出的光線將會被半主動激光制導武器發現、鎖定、追蹤。
在這一系列的過程中,半主動激光制導武器中的導引頭主要起到了兩個作用:一是發現目標物反射的光線,二是按照制導規律將參數送入控制系統。
1 激光半主動制導原理簡介
半主動激光尋的器結構如圖1包括頭罩、光學系統、激光探測器、放大器、和差電路、數字控制器、陀螺伺服機構組成。頭罩保護尋的器不受氣流影響,光學系統是由一組特殊的透鏡組構成,可以把目標物上漫反射出特定波長的光線聚焦到激光探測器上。激光探測器將光信號轉換成電信號,通過和差運算和放大器、數字控制器控制陀螺伺服機構,使目標點在激光探測器光屏中間[1]。(允許一定的誤差)

圖1
其中激光探測器使用象限元件來測定目標相對于光軸的偏移量,常見的有二象限、三象限、四象限,當特定波長的光聚焦到某一象限時,相應的光敏元件輸出電信號,經過邏輯電路的邏輯運算后,就確定了目標的相對于導彈的位置,同時電信號被輸入到數字控制器中,改變飛行方向追蹤目標。原理如圖2。
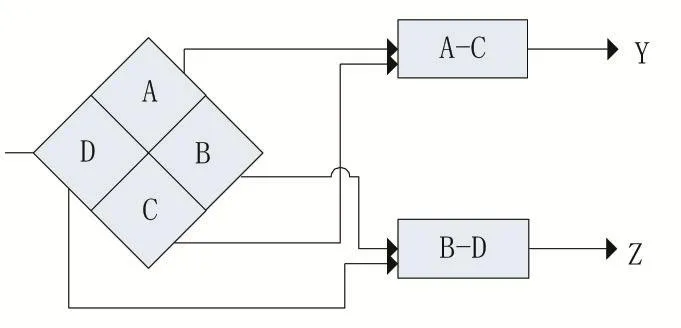
圖2
本文研究的系統采用雙四象限探測器,雙四象限的光敏面分為中心區和外圍區,當光線聚焦到中心區時可以實現線性跟蹤,由于激光制導武器整個追蹤過程比較復雜,本文只討論在線性區的追蹤過程[2]。而且本文對激光探測器做了一定的簡化處理,省略了運算電路,直接將光敏面獲得的電信號經放大和取樣后送入數字控制器處理。雙四象限的光敏面如圖3所示,簡化后的原理圖如圖4所示。
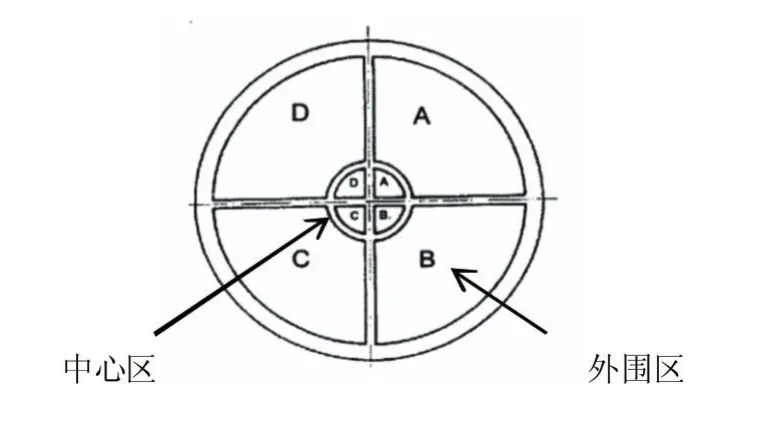
圖3
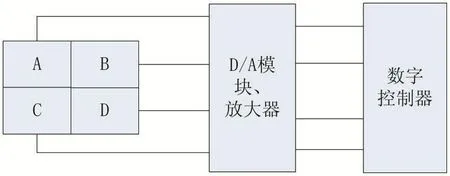
圖4
2 構造D(z)的總體方案
2.1 控制器選型
數字控制器是激光制導系統的核心,選擇80C51單片機。80C51單片機有一個8位CPU,4個8位并行I/O口(P0-P3),4kb的ROM程序存儲器,自帶片內振蕩器及時鐘電路[6]。管腳圖如圖5。
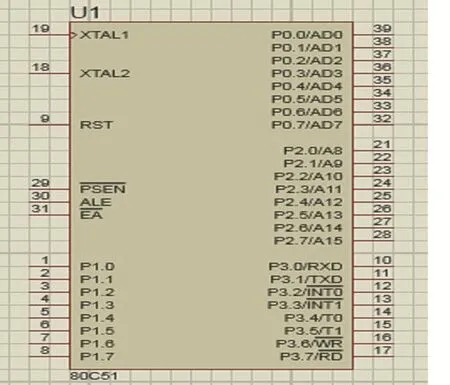
圖5
2.2 建立模型
半主動激光制導導引頭結構框圖如圖[3]6所示。

圖6
其中漫反射的光經過頭罩、光學系統,被激光探測器探測到,所產生的電信號被放大器放大,這一過程中的所有器件都是為了得到一個穩定的位置信號或速度信號,所以在系統框圖中我將這一部分等效成輸入量E(t)和一個放大系數K。數字控制器D(z)控制伺服陀螺機構輸出進動角度。最終的系統框圖如圖7所示。
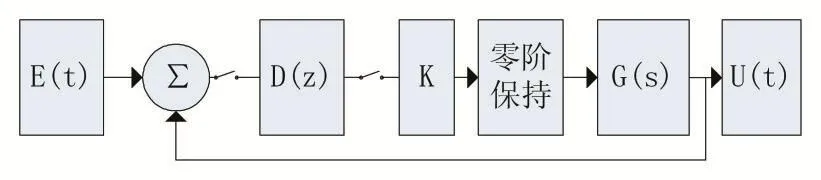
圖7
G(s)為伺服陀螺機構,考慮其慣性特性,其傳遞函數為:
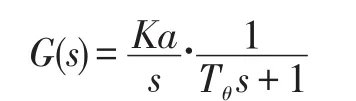
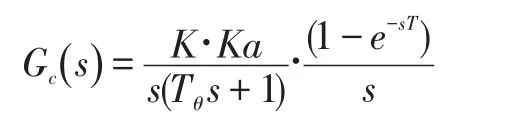
K為放大系數,Ka為機電常數,Tθ為轉子時間系數。所以得出系統的廣義被控對象開環傳遞函數為:
2.3 構造數字控制器 D( z)
對 Gc(s)進行 Z變換:
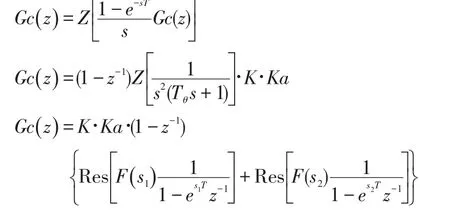
下面就不同情況根據Gc(z)設計數字控制器D(z)。
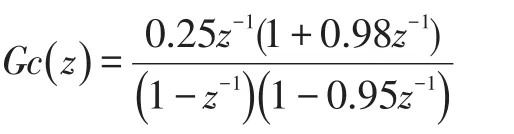
若令Tθ=2 采樣時間T=0.1s,Ka=5K=2
則:
(1)第一種情況:
若目標靜止,則輸入信號為單位階躍信號,q=1。Gc(z)存在一個滯后環節[5]。
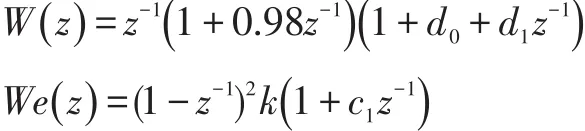
設:
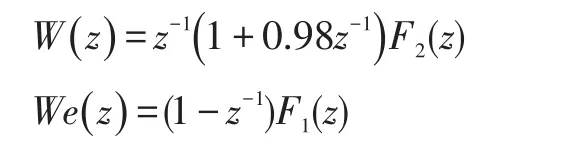
其中:
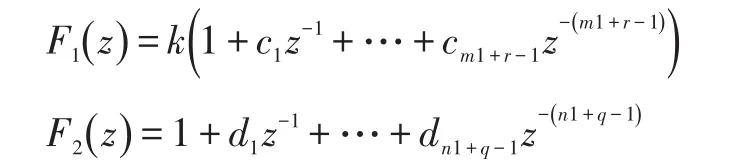
式中m1為不穩定極點,n1為不穩定零點,r為滯后環節,根據式 Gc(z)得知 m1=1,n1=0,r=1。
則:
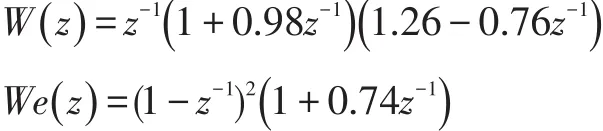
根據W(z)+We(z)=1求出k=1,d0=-0.49,c1=0.49
得出:
根據數字控制器脈沖傳遞函數
得出:
使用MATLAB仿真
控制系統整體框圖如圖8所示。
系統輸出波形如圖9所示。
數字控制器輸出波形如圖10所示。
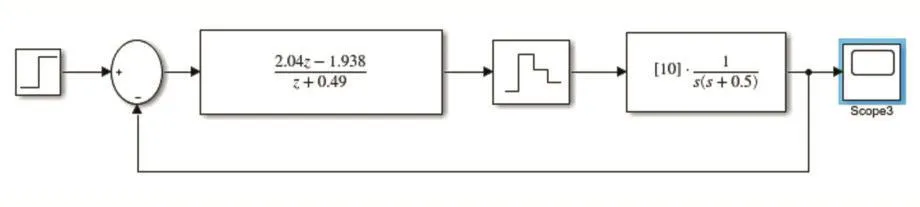
圖8
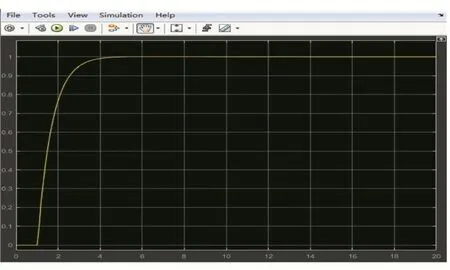
圖9
從系統輸出波形圖中可以看出輸出U(t)在第5秒完全跟蹤輸入信號,并且各采樣點之間無波紋。從數字控制器的波形圖可以看出數字在有限拍內輸出恒定不變,控制器D(z)符合要求。
(2)第二種情況:
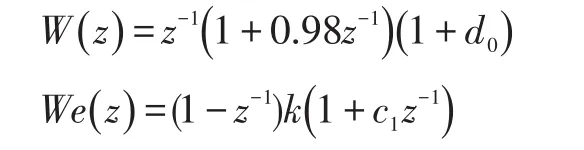
若目標做勻速運動,輸入信號為速度信號,則q=2
設:
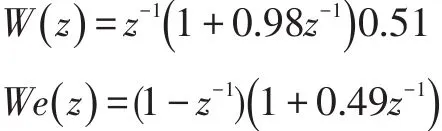
根據W(z)+We(z)=1
得出:
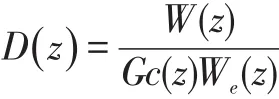
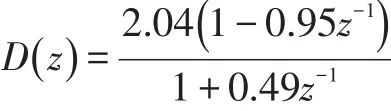
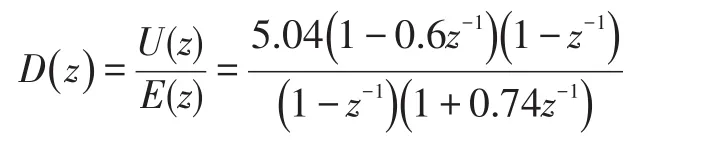
根據數字控制器脈沖傳遞函數:
得出:

使用MATLAB仿真
控制系統整體框圖如圖11所示。
系統輸出波形如圖12所示。
數字控制器輸出波形如圖13所示。
從系統輸出波形圖中可以看出輸出U(t)在第6秒左右可以實現完全追蹤給定信號,從數字控制器的波形圖可以看出數字在有限拍內輸出恒定不變,數字控制器D(z)符合要求。
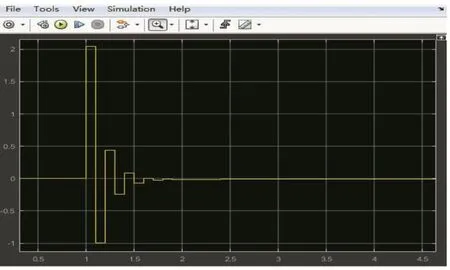
圖10
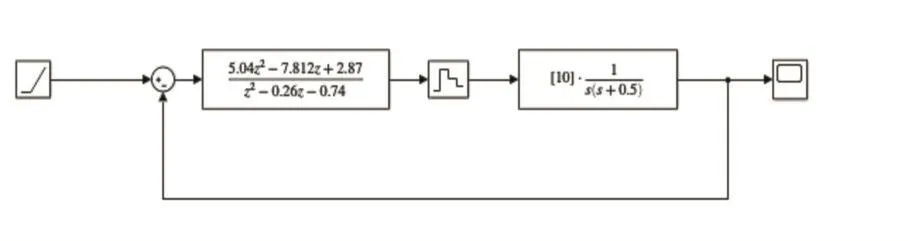
圖11
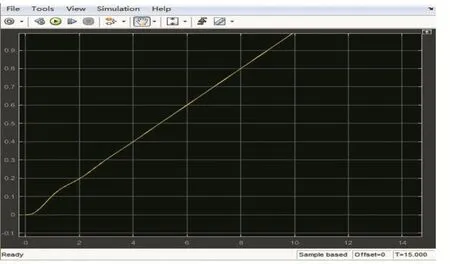
圖12
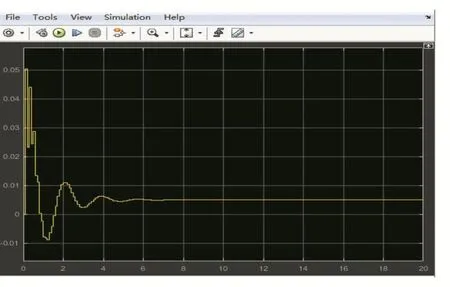
圖13
3 數字控制器D(z)的程序實現法
一般來說數字控制器的程序實現法有直接實現法、并接實現法、串接實現法。下面就較為復雜的第二種情況來對比一下直接實現法和串接實現法。
第二種情況的直接實現法:
系統框圖及的輸出波形圖如圖14所示。
第二種情況的串接實現法:

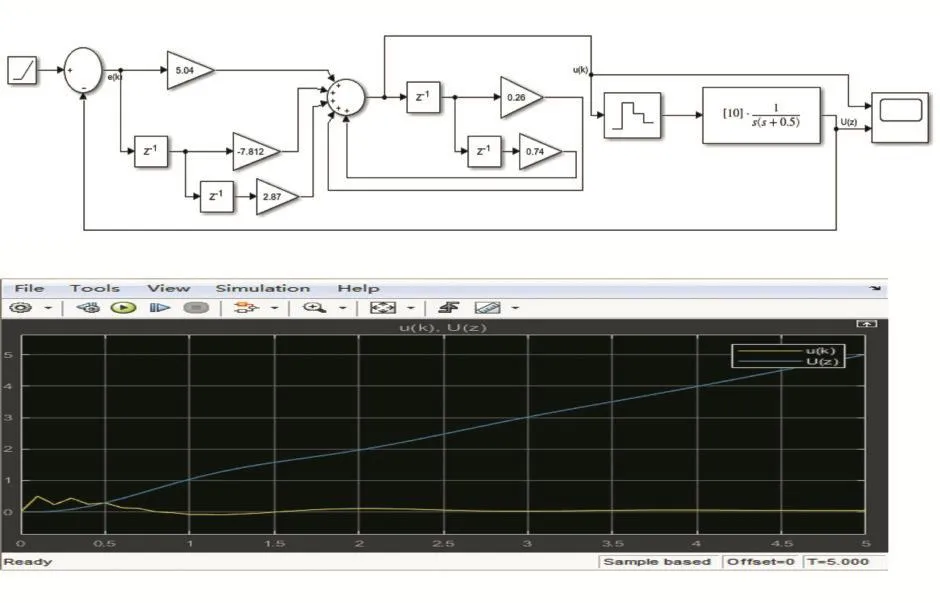
圖14
則系統框圖及輸出波形圖如圖15所示。
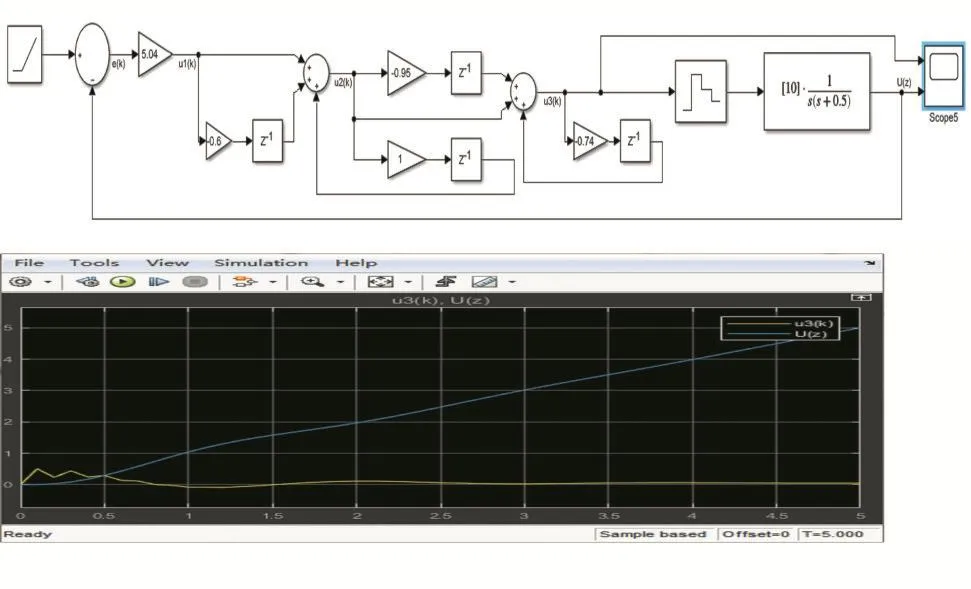
圖15
通過這兩種程序實現法正常情況下的輸出波形圖來看,二者的差別很小。但是考慮到激光制導武器在飛行過程中會存在的各種干擾,可能會使數字控制器中的零極點發生變化。如果假設數字控制器中z=0.95的零點發生變化,變為z=1,那么程序框圖中的參數也會發生變化,此時再做出系統框圖并觀察和對比輸出的波形。
極點變換后:
對比波形程序框圖如圖16所示。
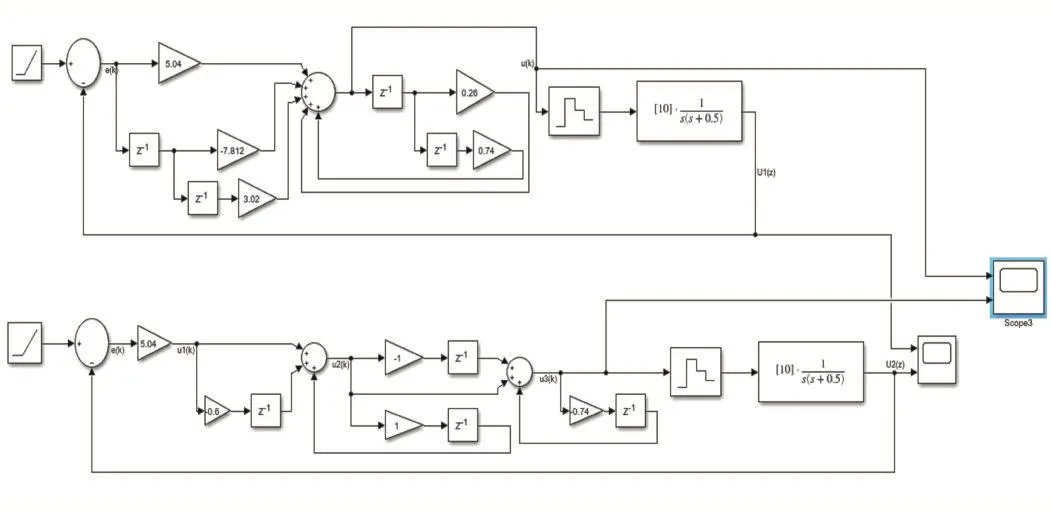
圖16
數字控制器輸出波形如圖17所示。
系統輸出波形如圖18所示。
由數字控制器輸出波形和系統輸出波形可以看出:由直接實現法等效的數字控制器波形振幅較大,達到穩態的時間較長,與串接實現法相比,后者更加穩定。由此得出結論:當數字控制器零極點發生變化時,串接實現法更為穩定,抗干擾更強。
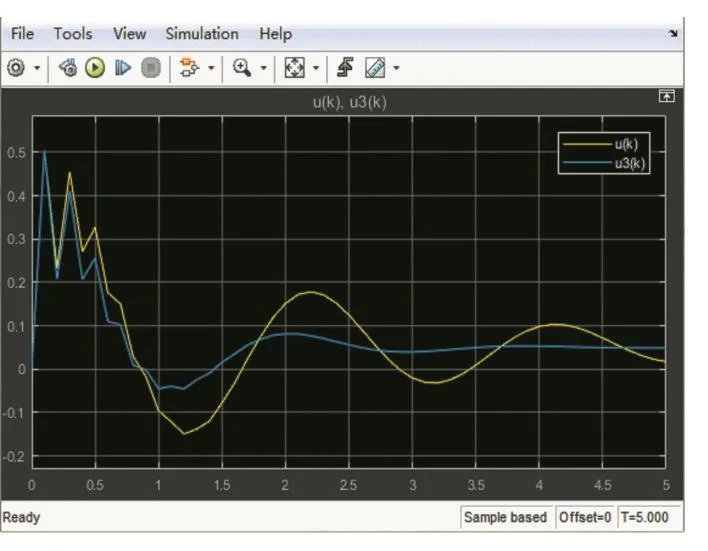
圖17
產生這種現象的原因是:直接實現法的D(z)不經過任何變化,直接化成的形式,其零極點被整合到一個式子中,當任意零極點發生變化,或存在一定誤差時,會使所有零極點發生相應的變化,對輸出結果產生的影響較大。串接實現法是先將D(z)的零極點形式化成多項積的形式,這樣變化后零極點互不影響,當控制器中任意零極點發生變化或存在一定誤差時,只影響相應的環節的零極點,不會使整個系統的零極點都受到影響。而并接實現法是將D(z)化成多項合的形式,原理和優點都與串接實現法類似,故不再贅述[4]。
4 結語
經過研究發現,不同的輸入信號所構造的數字控制器也不相同,因為數字控制器D(z)的結構取決于廣義控制對象傳遞函數Gc(z)和閉環傳遞函數W(z)、誤差傳遞函數We(z)。而廣義被控對象傳遞函數一旦確定是不會發生變化的,所以構造數字控制器關鍵在于如何確定 W(z),W(z)取決于 Gc(z)的不穩定零點和外部輸入信號的階次,所以不同輸入信號所構造的數字控制器不僅零極點不同,分子分母的階次也不同。最后根據數字控制器的程序實現法的研究,為激光半主動導引頭的程序語言提供理論依據和框架。
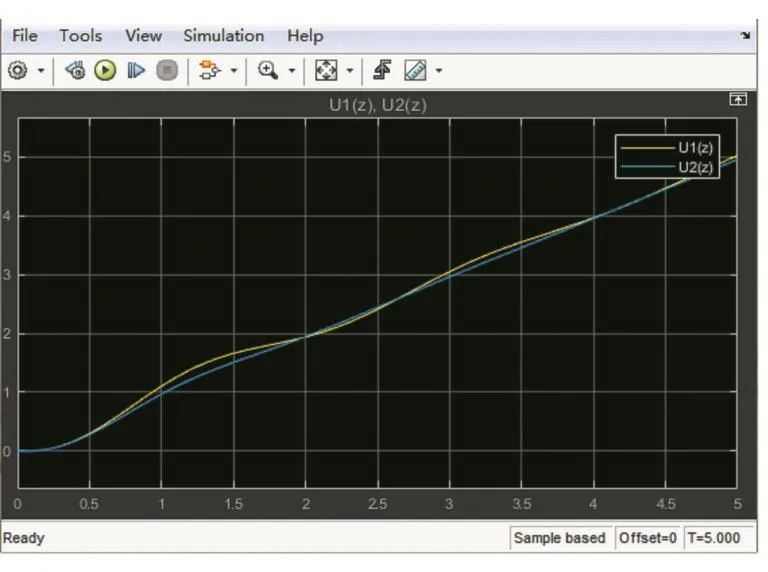
圖18
[1]張海洋,趙長明.激光半主動尋的器原理與結構[C].2005全國博士生學術論壇北京理工大學信息科學技術學院,2005:114-115.
[2]孫明.某激光半主動引導頭制導電路方案設計及實現[D].南京:南京理工大學,2012.
[3]于英杰,劉藻珍.某型激光導引頭建模于仿真研究[J].系統仿真學報,2003,15(2):158-159.
[4]廖道爭,施保華.計算機控制技術[M].北京:機械工業出版社,2015:101-123.
[5]楊瑞,張軍.自動控制原理[M].四川:電子科技大學出版社,2016:292-293.
[6]蘇珊,高如新,譚興國.單片機原理與應用[M].四川:電子科技大學出版社,2016:14-16.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06