增程式電動環(huán)衛(wèi)車性能仿真研究
2018-06-12 06:41:20劉淑琴黃菊花曹銘陳歡歡
現代電子技術 2018年12期
關鍵詞:控制策略
劉淑琴 黃菊花 曹銘 陳歡歡
摘 要: 該文以增程式電動環(huán)衛(wèi)車為研究對象,以整車基本參數及性能設計目標為限制條件,運用汽車理論相關知識對驅動電機、動力電池和增程器等關鍵部件的功率進行匹配計算。利用Advisor仿真軟件建立關鍵部件模型,并采用NEDC循環(huán)工況進行模擬仿真。仿真結果表明,在滿足動力性和燃油經濟性的基礎上,最高時速可達87 km/h,0~50 km/h加速時間小于15 s,電動環(huán)衛(wèi)車能保持在最佳效率區(qū)域運行,且滿足續(xù)駛里程的設計需求。
關鍵詞: 增程式電動環(huán)衛(wèi)車; 參數匹配; 控制策略; 系統(tǒng)優(yōu)化; Advisor; 續(xù)駛里程
中圖分類號: TN830.1?34; TP202+.1 文獻標識碼: A 文章編號: 1004?373X(2018)12?0111?04
Abstract: The extended?range electric sanitation vehicle is studied in this paper. Taking the fundamental parameters of the whole vehicle and the performance design objective as the constraint conditions, the power matching calculations are performed for the key components such as the drive motor, power battery, and range extender by using the related knowledge of automobile theory. The Advisor simulation software is used to build the models of key components. The NEDC cyclic working condition is used to perform analog simulation. The simulation results show that on the basis of meeting the dynamic and fuel economy requirements, the maximum speed of the electric sanitation vehicle reaches 87 km/h, and the acceleration time of 0~50 km/h is less than 15 seconds; the electric sanitation vehicle can keep operation in the best efficiency zone and meet the design requirement of endurance mileage.
Keywords: extended?range electric sanitation vehicle; parameter matching; control strategy; system optimization; Advisor; endurance mileage
0 引 言
近兩年來,新能源汽車在各方的努力下迎來了發(fā)展的春天,自2014年開始新能源產業(yè)更是在一系列利好政策的刺激下迎來了爆發(fā)式的增長。增程式電動汽車作為一種可增加續(xù)駛里程同時又可降低電動汽車對動力電池依賴性的新車型進入到了大眾的視野。增程式電動汽車同時具備車載動力電池組和增程器,其中發(fā)動機并不直接參與驅動,只是用來帶動發(fā)電機發(fā)電,及時為動力電池組補充電量,使動力電池組的電池的荷電狀態(tài)(State Of Charge,SOC)值維持在一個安全范圍,同時又能增加續(xù)駛里程,解決純電動汽車的里程焦慮問題。
1 動力系統(tǒng)選型及設計要求
1.1 增程式電動汽車的基本構型
增程式電動汽車的基本結構簡單,與純電動汽車相比,只是增加了增程器模塊,所以結構上與純電動車基本一致,如圖1所示。
由圖1可知,動力電池組與驅動電機之間、增程器與驅動電機之間、增程器與動力電池組之間都是電能傳遞,而驅動電機與車輪以及傳動系統(tǒng)之間都是通過機械連接來傳遞能量的。針對動力系統(tǒng)中各部件的運行狀態(tài),適時選擇最佳的運行模式:純電動模式或者增程模式。
根據日常工作的需求,增程式電動環(huán)衛(wèi)車的動力性能指標設計為,最高時速不低于80 km/h,加速到50 km/h的時間不超過15 s,純電動模式續(xù)駛里程為70 km,增程模式續(xù)駛里程為230 km,低速時最大爬坡度為0.2。
2 動力系統(tǒng)關鍵部件參數匹配
2.1 驅動電機參數匹配
增程式電動環(huán)衛(wèi)車的特點是車輛行駛的驅動力全部來源于驅動電機,可見驅動電機參數的確定對整車動力性的影響很大,首先應對驅動電機進行參數匹配[1?3]。驅動電機的主要參數包括峰值功率、額定功率、峰值轉矩及最高轉速[4]。
驅動電機轉速與汽車行駛速度之間的關系為:
3 關鍵部件性能仿真及分析
3.1 控制策略的選擇
為了盡可能使車輛處于純電動模式運行狀態(tài),充分發(fā)揮發(fā)動機的高效區(qū),這里選擇恒溫器策略[7]。其基本思想是依據動力電池的SOC控制發(fā)動機的工作狀態(tài)[8?9],當動力電池組的SOC值低于設定的下限值SOClow時,增程器啟動發(fā)電,其中發(fā)動機按照恒功率輸出,工作在發(fā)動機的最高效率點或最佳排放點[10]。實際設計中,將動力電池組的使用范圍定為30%~80%,該控制策略的最大優(yōu)勢是發(fā)動機一直處于最佳工作狀態(tài),工作效率及排放性能非常好。
3.2 整車性能仿真分析
采用Advisor仿真軟件對整車的性能進行仿真驗證,選擇NEDC循環(huán)工況,結果如圖2所示。
由圖2可知,當動力電池組的電量充足時(SOC>30%),發(fā)動機處于關閉狀態(tài),此時車輛處于純電動運行模式;一旦動力電池組的荷電狀態(tài)到達臨界狀態(tài)(SOC≤30%),發(fā)動機立即啟動,并以恒功率輸出,工作在最佳工作點處,為動力電池組補充電量,此時車輛處于增程式工作模式。
3.3 動力性仿真分析
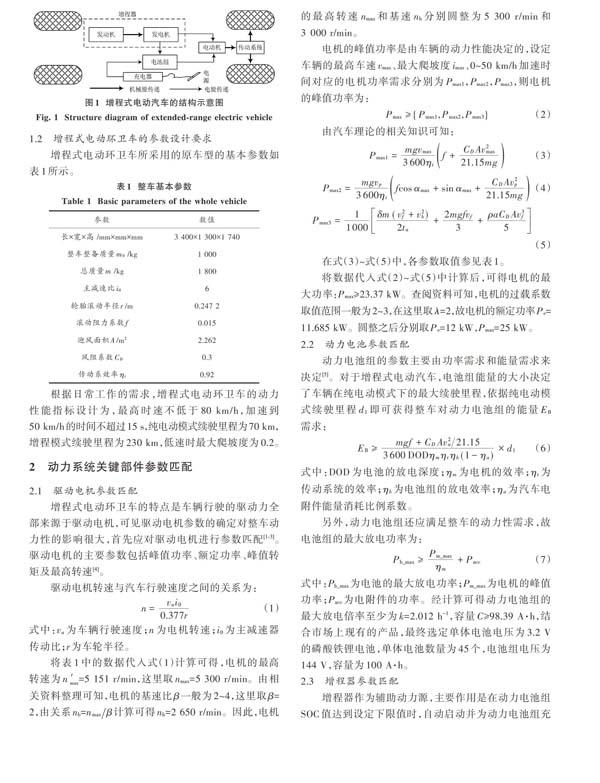
車輛的動力性能主要由汽車的最高車速、最大爬坡度等指標來衡量。整車的最高車速為80 km/h,仿真時采用的是0~50 km/h來仿真加速性能[11],仿真結果如圖3所示。
圖3中由上到下四條曲線分別為:車速跟隨曲線、動力電池組SOC變化曲線、動力電池組輸出功率曲線、發(fā)動機扭矩輸出曲線。結果表明,車輛可達到的最高車速為87.5 km/h,0~50 km/h的加速時間為13.7 s。
3.4 經濟性仿真分析
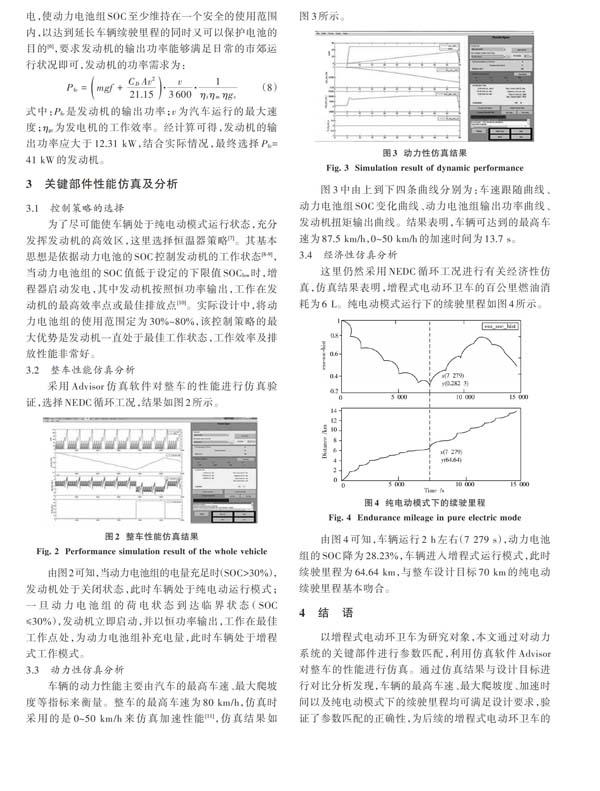
這里仍然采用NEDC循環(huán)工況進行有關經濟性仿真,仿真結果表明,增程式電動環(huán)衛(wèi)車的百公里燃油消耗為6 L。純電動模式運行下的續(xù)駛里程如圖4所示。
由圖4可知,車輛運行2 h左右(7 279 s),動力電池組的SOC降為28.23%,車輛進入增程式運行模式,此時續(xù)駛里程為64.64 km,與整車設計目標70 km的純電動續(xù)駛里程基本吻合。
4 結 語
以增程式電動環(huán)衛(wèi)車為研究對象,本文通過對動力系統(tǒng)的關鍵部件進行參數匹配,利用仿真軟件Advisor對整車的性能進行仿真。通過仿真結果與設計目標進行對比分析發(fā)現,車輛的最高車速、最大爬坡度、加速時間以及純電動模式下的續(xù)駛里程均可滿足設計要求,驗證了參數匹配的正確性,為后續(xù)的增程式電動環(huán)衛(wèi)車的開發(fā)提供了理論依據與支持。
參考文獻
[1] 王杉.插電式串聯(lián)混合動力客車參數匹配及控制策略研究[D].長春:吉林大學,2009.
WANG Shan. Study on the parametric design and control of plug?in series hybrid electric bus [D]. Changchun: Jilin University, 2009.
[2] 杜一凡,何耀華.新時期我國新能源汽車產業(yè)發(fā)展戰(zhàn)略研究[J].電子制作,2015(2):235.
DU YiFan, HE Yaohua. Research on the development strategy of the new energy vehicle industry in China [J]. Practical electronics, 2015(2): 235.
[3] AL?ADSANI A S, JARUSHI A M, SCHOFIELD N. An ICE/HPM generator range extender in a series hybrid electric vehicle [C]// Proceedings of 5th IET International Conference on Power Electronics, Machines and Drives. Brighton: IET, 2010: 441.
[4] TATE E D, HARPSTER M O, SAVAGIAN P J. The electrification of the automobile: from conventional hybrid, to plug?in hybrids, to extended?range electric vehicles [J]. SAE international journal of passenger cars?electronic and electrical systems, 2009, 1(1): 156?166.
[5] GOLBUFF S, KELLY E D, SHELTON S V. Cost optimization of a plug?in hybrid electric vehicle [C]// Proceedings of ASME 2nd International Conference on Energy Sustainability. [S.l.: s.n.], 2008: 497?505.
[6] STROUS T D. Design of a permanent magnet radial flux concentrated coil generator for a range extender application [D]. Delft: Delft University of Technology, 2010.
[7] 周煒冬.基于Advisor的增程式電動汽車性能仿真及試驗研究[D].合肥:合肥工業(yè)大學,2012.
ZHOU Weidong. Simulation and testing research of extended?range electric vehicle based on Advisor [D]. Hefei: Hefei University of Technology, 2012.
[8] YAMAGUCHI K, MOROTO S, KOBAYASHI K, et al. Development of a new hybrid system?dual system [C]// Proceedings of International Congress & Exposition. Detroit: SAE, 1996: 143?154.
[9] 張恒平.增程式城市公交車整車控制策略及總成參數匹配研究[D].武漢:武漢理工大學,2013.
ZHANG Hengping. Study on control strategy and parameter matching of extended range city bus [D]. Wuhan: Wuhan University of Technology, 2013.
[10] 聞健,陳勇.增程式電動校車動力系統(tǒng)參數匹配與仿真研究[J].計算機仿真,2015,32(10):172?176.
WEN Jian, CHEN Yong. Parameter matching and simulation study on powertrain for extended?range electric school bus [J]. Computer simulation, 2015, 32(10): 172?176.
[11] 龔賢武,吳德軍,馬建,等.增程式電動汽車動力系統(tǒng)參數匹配與仿真研究[J].機械科學與技術,2014,33(6):929?933.
GONG Xianwu, WU Dejun, MA Jian, et al. Parameter matching and simulation study of powertrain for extended?range electric vehicle [J]. Mechanical science and technology for aerospace engineering, 2014, 33(6): 929?933.
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業(yè)技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36
