高精度道路導航地圖的進展與思考
2018-06-12 01:25:50劉經南吳杭彬郭遲張宏敏左文煒羊鋮
中國工程科學 2018年2期
劉經南,吳杭彬,郭遲,張宏敏,左文煒,羊鋮
(1. 武漢大學,武漢 430079;2. 同濟大學,上海 200092;3. 易圖通科技(北京)有限公司,北京 100070)
一、前言
傳統導航地圖在日常生活中主要被用于導航和查詢地理信息,出行的人群是其主要服務對象。基于人類自身的視覺識別能力和邏輯思維能力,很多道路信息都被精簡[1]。隨著互聯網時代的高速發展,更多基于位置的新型服務和行業被提出,例如“互聯網+”智能交通、無人系統等。國家發展和改革委員會提出的促進智能交通發展的 “互聯網+”便捷交通實施方案已經正式發布。這些服務都是依托互聯網來開展的,因此地圖的服務對象不再僅僅是人類,而是慢慢向機器過渡,這對地圖的精度、內容結構和計算模式等都提出了新的要求。
(一)地圖精度
普通導航地圖的精度在5 m左右,只描繪了道路的位置和形態,沒有反映道路的細節信息,無法準確知道車輛所在位置。而高精度道路導航地圖的絕對精度要求優于1 m,相對精度達到10~20 cm,包含了車道、車道邊界、車道中心線、車道限制信息等非常豐富的信息,如圖1所示。
(二)地圖內容結構
高精度道路導航地圖更加真實地反映道路的實際樣式,因此包含更多的圖層數量和道路數據,圖層描繪也更加細致。高精度道路導航地圖不僅具有更高精度的坐標,還擁有更加準確的道路形狀。同時,每個車道的坡度、曲率、航向、高程等數據也被添加進來。另外,車道之間的車道線情況(虛線、實線、單線和雙線)、車道線顏色(白色、黃色)、道路隔離帶、隔離帶材質、道路箭頭、文字內容和所在位置在高精度道路導航地圖中都需要詳盡描述。
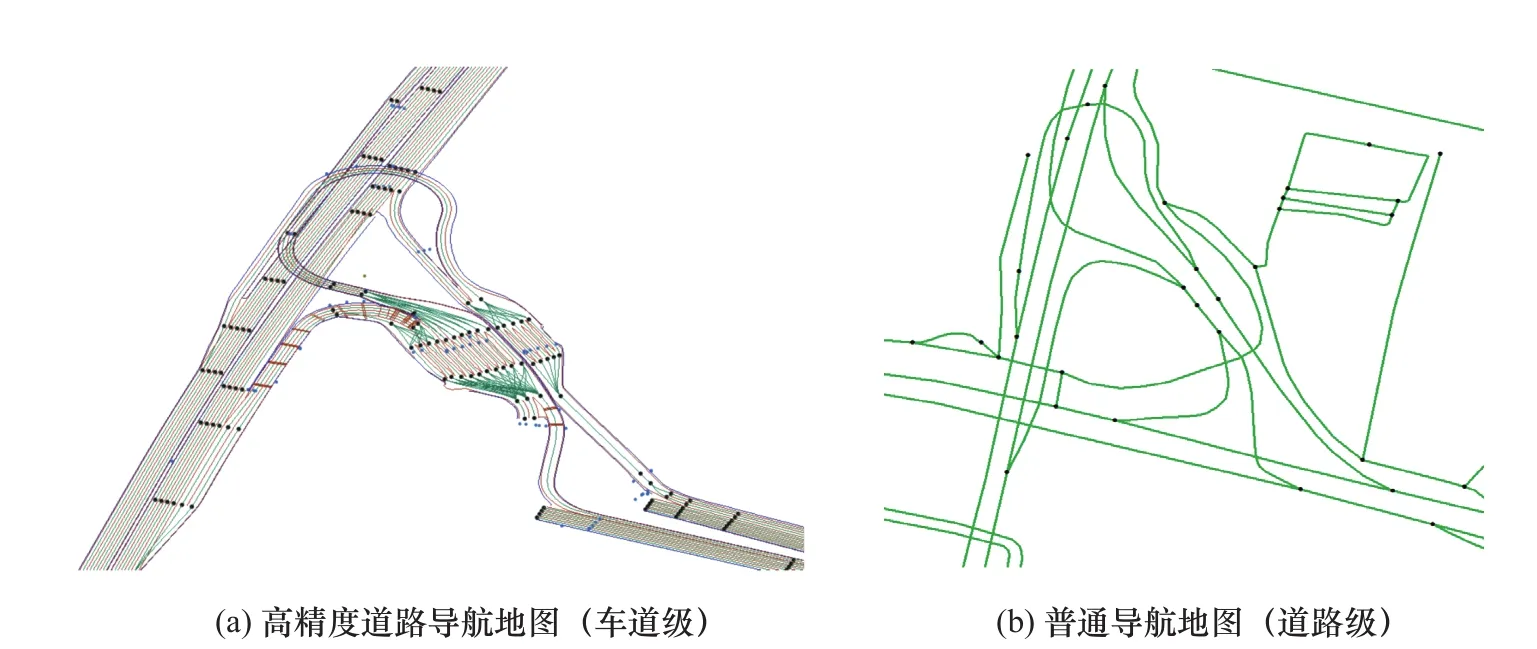
圖1 高精度道路導航地圖和普通導航地圖對比示意圖
(三)計算模式
高精度道路導航地圖的數據量是普通地圖的105倍甚至更多,目前以云計算為核心的集中式大數據處理模式已經滿足不了需求。隨著物聯網和5G通信技術的快速發展,云端協同的計算方法——邊緣計算被提出,同時眾包的任務發布模式也被應用于多個行業。因此高精度道路導航地圖的大數據處理模式可以采用“眾包+邊緣計算”的模式。
二、相關現狀
隨著智能交通和自動駕駛領域的飛速發展,現有的普通導航地圖在內容、精度和完整性方面都無法滿足高層次的應用需求[2]。針對道路的高精度電子地圖被逐步提出并得到了廣泛的認同[3,4]。
目前在輔助駕駛系統和自動駕駛領域使用高精度道路導航地圖數據的研究較多。例如根據高精度道路導航地圖進行信息行為和車輛定位的研究[5,6],在輔助駕駛和自動駕駛系統中使用高精度道路導航地圖信息并在其上進行自動駕駛車道軌跡引導方法的研究[7,8]。而關于建立高精度道路導航地圖的方法研究也有很多,例如通過配備GPS-RTK的采集車沿特定線路采集數據[9];使用激光雷達與廣角攝像頭結合的方法提取道路信息,加上配備高精度全球衛星導航系統(GNSS)則能夠達到10 cm精度,但這種采集方案成本較高[10];也有研究者提出使用低成本傳感器創建車道級地圖的方法,通過全球定位系統+慣性導航系統(GPS/INS)緊耦合進行定位,從正射影像圖中獲取相關地圖信息[11]。
目前國內外從事高精度電子地圖的測繪和生產的單位也逐漸增多。在Google以及Daimler的無人駕駛汽車的研制過程中,高精度電子地圖都是重要的組成部分[12]。2015年,奧迪、寶馬、Daimler聯合起來斥資31億美元購買諾基亞Here地圖,為研發高精度道路導航地圖做準備。2015年,高精度道路導航地圖已經應用于特定場景,2011年寶馬的3系Track Trainer,2014年奧迪的RS7都利用高精度道路導航地圖技術在Laguna Seca和Hockenheim成功跑完了賽道。從2016年開始,很多互聯網企業通過收購的方式獲取地圖數據資源,然后結合自身算法、云計算能力生產高精度道路導航地圖,如Google、Uber、百度、阿里等。同時,車企也開始依賴第三方地圖服務,2017年初,Mobileye 與大眾、寶馬和日產簽署協議,前者將為三家汽車巨頭提供地圖產品,而汽車廠商將負責為 Mobileye 提供更多的地圖數據。
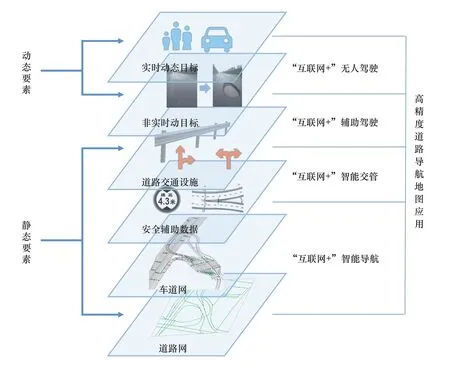
圖2 高精度道路導航地圖應用分析
三、需求分析與建模
本文從“互聯網+”智能交通應用及未來20年無人系統行業發展的典型應用場景出發,將高精度道路導航地圖劃分為6層建立需求模型,如圖2所示。
(一)“互聯網+”智能導航
隨著城市環境的不斷建設,為了提高道路使用效率、緩解擁堵,很多新的交通管理措施不斷被實施。例如多乘員車道(HOV車道)、潮汐車道(見圖3)等。HOV車道僅供乘坐至少某一規定乘客數的車輛通行。潮汐車道是指可變車道,即某一條車道在不同時段內行駛方向會發生變化。這些新的交通管理方案的實施主要是通過車道來實現的,而高精度道路導航地圖可以精準反映這些信息,為人們提供智能導航服務。
(二)“互聯網+”智能交管
道路交通執法管理具有很多難題,尤其是在執法取證和事故應急處理方面。而高精度道路導航地圖可以提供新的技術手段來解決交通執法管理中的困難。
1. 交警執法領域
車道級違法行為執法取證是道路執法領域的一個難點問題。車道級違法行為指移動目標相對于地面車道或其他移動目標而言,相對位置移動在一個車道級別內的、違反交通法規的行為[13],如不按規定車道行駛等。由于數據采集困難和現場還原困難導致這些行為目前難以執法取證。而高精度道路導航地圖可以精準反映車輛行駛在哪一條車道上,因此可以對車輛是否有車道級違法行為做出準確判斷,滿足車道級違法行為執法取證的需求。
2. 保險理賠領域
車險理賠行業長期受到騙保行為的困擾,耗費了大量的人力物力。這是因為保險人員往往只能查勘事后證據,無法判斷事故的全過程。高精度道路導航地圖包含豐富細致的車道信息,因此可以精準反映車輛的行駛狀態,并且在地圖上將事故的全過程進行還原,從而可以幫助保險人員對事故進行準確判斷。

圖3 HOV車道和潮汐車道
(三)“互聯網+”輔助駕駛/無人駕駛
無人駕駛領域要求地圖在幾何上具有更細的粒度,細致地刻畫道路上每個車道的詳細信息。而在拓撲網絡上,也要求準確表達車道之間的連接關系。高精度道路導航地圖包含多個層次的幾何拓撲數據,可以滿足面向輔助駕駛和自動駕駛的不同層次的運用需求。除此以外,高精度道路導航地圖還包含動態要素。動態要素包括兩種,一種是半實時的動態要素,它在自動駕駛領域主要用于進行全局的路徑規劃;另一種是實時的動態要素,主要指動態障礙物,它主要應用于自動駕駛系統實現局部路徑規劃。
四、高精度道路導航地圖的結構與計算
(一)高精度道路導航地圖結構
道路地圖是對實際道路進行反映,通過特定圖層來描繪特定類別,然后將圖層疊加進行路面表達。終端上顯示的導航地圖往往由10多層甚至20多層不同分辨率的圖片組成,當用戶進行縮放時,程序根據縮放級數,選擇不同分辨率的瓦片圖(用方格來模擬實體),拼接成一幅完整的地圖。高精度道路導航地圖也是如此,只是它在普通電子地圖的基礎上包含了更多的圖層數量,且每一圖層的描繪更加精細。
高精度道路導航地圖由四個部分的數據構成,分別是道路網數據、車道網數據、安全輔助數據和道路交通設施數據。這四類數據構成的地圖結構內容根據地圖精度不同顯示的內容也就不同,其基本結構劃分和顯示內容示例,如圖4所示。
道路網主要是由道路基準線網絡構成,用于描述道路的幾何形態、表達與道路設施間的關系。高精度道路導航地圖道路網示意圖,如圖5 所示,它包括道路基準線、道路基準線連接點和路口等圖層。
車道網記錄路網中每個獨立車道的相關屬性,用于車道級的道路顯示、定位、路徑規劃和駕駛策略輔助。它包括車道級道路、車道級道路連接點、車道級道路形狀點等圖層,如圖6所示。
安全輔助數據和道路交通設施數據是對車道安全數據和車道上的其他交通設施進行描述,用于輔助車道級定位和顯示,例如曲率、航向、縱橫坡度等。
道路交通設施數據則包括交通標識、路側設施和固定地物等信息。
(二)計算模式
高精度道路導航地圖描繪的道路信息更加豐富,包含的細節更多,因此它的數據量也更加龐大。傳統導航電子地圖每千米的數據量約是1 kB,而高精度道路導航地圖每千米的數據量大約是100 MB,是傳統導航地圖的105倍。而且高精度道路導航地圖中的數據類型復雜多樣,數據量急劇增加,并且數據處理的實時性要求較高。所以目前以云計算模型為核心的集中式大數據處理方式已經不能滿足高精度道路導航地圖的數據計算要求,需要建立新的計算模型。本文提出“眾包+邊緣計算”模型作為高精度道路導航地圖計算模式。
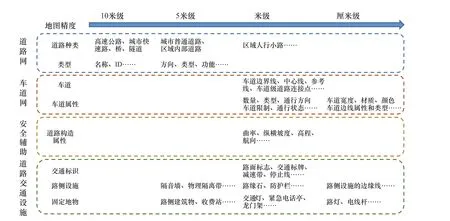
圖4 地圖結構內容劃分示意圖
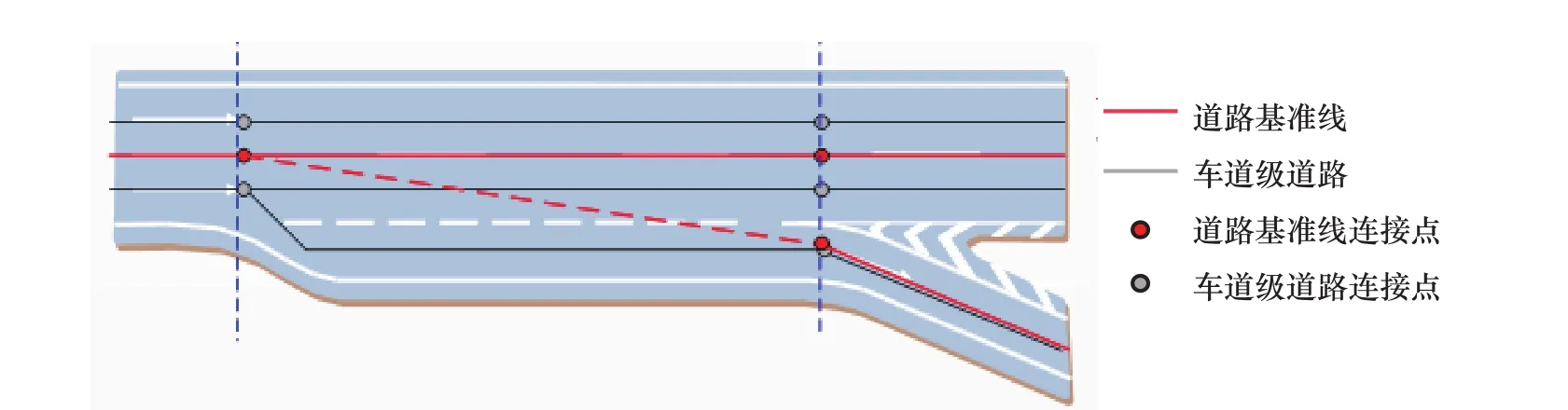
圖5 高精度道路導航地圖道路網示意圖
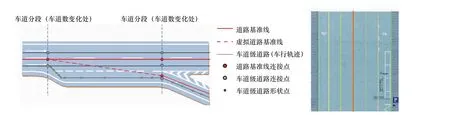
圖6 高精度道路導航地圖車道網示意圖
高精度道路導航地圖的數據采集任務很艱巨,需要采集車跑過每一條道路,然后上傳數據繪圖。首先,這需要花費大量的時間;其次,道路上的一些信息會發生變化,高精度道路導航地圖需要保持周期性數據更新,再次采集很多信息又是重復的,且耗費更多的資源。筆者認為可以采用眾包的方式解決這些問題,高精度道路導航地圖的用圖者同時也可以是繪圖者。通過眾包的方式,將數據采集設備裝在使用高精度道路導航地圖的車輛上,其在行駛時邊用圖邊采集數據,并且將獲取到的數據上傳。這種方式可以很好地滿足城市街道需要一周更新一次來反映其構造和新的交通模式的需求。美國的Mapper公司已經采用這種方式來獲取地圖數據。
隨著物聯網和5G通信技術的快速發展,有別于傳統云計算的全新計算模式——邊緣計算被研究者們提出。邊緣計算是指在網絡邊緣執行計算的一種計算模型,邊緣計算中邊緣的下行數據表示云服務,上行數據表示高精度道路導航地圖服務,而邊緣計算的邊緣是指從數據源到云計算中心路徑之間的任意計算和網絡資源[14,15]。該計算方法是一種在靠近物或數據源頭的網絡邊緣側,融合網絡、計算、存儲、應用核心能力的開放平臺,就近提供邊緣智能服務,滿足行業數字化在敏捷聯接、實時業務、數據優化、應用智能、安全與隱私保護等方面的關鍵需求。針對高精度道路導航地圖的情況,在邊緣式計算中,由于數據量的增加以及對實時性的需求,需將原有云中心的計算任務部分遷移到網絡邊緣設備上,以提高數據傳輸性能,保證處理的實時性,同時降低云計算中心的計算負載。本文研制了高精度道路導航地圖邊緣計算模型參考框架,如圖7所示。
五、思考
(一)標準體系框架
目前國內外從事高精度道路導航地圖的測繪和生產的單位逐漸增多,但各作業單位的技術水平、采用的儀器設備、作業方法、數據處理和成果形式各不相同。不同企事業單位采用的標準也不一致。這對高精度道路導航地圖的管理和共享帶來了問題,因此亟需加強高精度道路導航地圖標準體系框架的制定。高精度電子地圖標準體系框架是形成高精度電子地圖標準體系的基本單元。它包括地圖基礎標準、云整合標準、應用服務標準和檢測評定標準四個部分,如圖8所示。
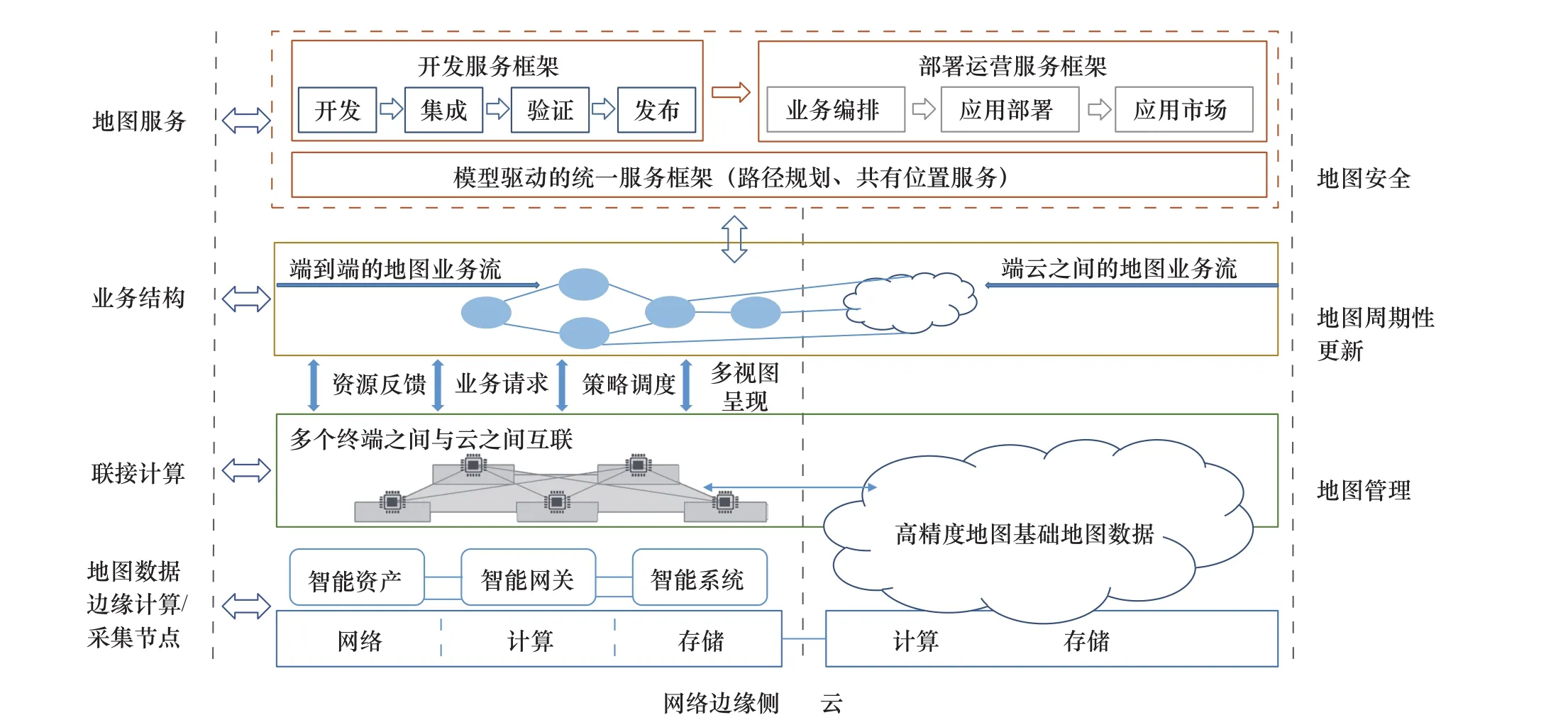
圖7 高精度道路導航地圖邊緣計算模型參考框架
(二)隱私與安全
出于對國家安全的考慮,許多國家對公共地圖的信息采集與繪制也有諸多規定,包括精確度、測繪區域、機構和人員等諸多限制條件。因此需要進一步規范公共地圖信息采集與高精度道路導航地圖數據保護政策,在保障信息安全和鼓勵高精度道路導航地圖技術發展之間,找到最佳平衡點和解決方案。
(三)坐標體系的開放問題
傳統導航地圖都有約定俗成的電子地圖版本審查和加偏移措施等加密手段,但是現在這些地圖加密手段與高精度道路導航地圖之間存在矛盾。因此,在未來的發展中要對高精度道路導航地圖懷有創新性思維,實際應用的導航定位服務都是局部的,或許可以嘗試用相對坐標系解決定位精度安全問題。

圖8 高精度電子地圖標準體系框架
(四)及時準確地進行數據更新
傳統導航地圖因其商業地圖公司及時、準確地進行數據更新,從而保障導航服務的準確性。而高精度道路導航地圖的更新過程除了道路/車道的幾何信息外,還包括交通要素在內的大量數據更新。而且,高精度道路導航地圖本身就包含龐大的數據量,如果每次都通過原始采集手段進行數據更新,將會導致過多冗余數據和過高的成本。因此在未來的高精度道路導航地圖發展中,采用眾包手段獲得用戶手上的大量及時數據,是一種更加便捷、低廉、可靠的數據更新手段。
[1] 劉少山, 唐潔. 第一本無人駕駛技術書 [M]. 北京: 電子工業出版社, 2017.Liu S S, Tang J. The fi rst book to introduce self-driving technology[M]. Beijing: Publishing House of Electronics Industry, 2017.
[2] Tao Z, Bonnifait P, Fremont V, et al. Mapping and localization using GPS, lane markings and proprioceptive sensors [C]. Tokyo:Intelligent Robots and Systems (IROS), 2013 IEEE/RSJ International Conference on IEEE, 2013.
[3] Nedevschi S, Popescu V, Danescu R, et al. Accurate ego-vehicle global localization at intersections through alignment of visual data with digital map [J]. Intelligent Transportation Systems, 2013,14(2): 673–687.
[4] 賀勇. 基于高精細地圖的GPS導航方法研究 [D]. 上海:上海交通大學(碩士學位論文), 2015.He Y. GPS navigation methods research based on high precision lane-level map [D]. Shanghai: Shanghai Jiao Tong University(Master’s thesis), 2015.
[5] Suganuma J, Uozumi T. Precise position estimation of autonomous vehicle based on map-matching [J]. IEEE Intelligent Vehicles Symposium, 2011 (4): 296–301.
[6] Levinson J, Montemerlo M, Thrun S. Map-based precision vehicle localization in urban environments [M]. Cambridge: MIT Press,2007.
[7] Hao L, Nashashibi F, Toulminet G. Localization for intelligent vehicle by fusing mono camera low-cost GPS and map data [J].Intelligent Transportation Systems, 2010 (9): 1657–1662.
[8] Ress C, Etemad A, Kuck D, et al. Electronic horizon—Providing digital map data for ADAS applications [J]. Madeira, 2008 (3):40–49.
[9] Sutarwala B Z. GIS for mapping of lane-level data and re-creation in real time for navigation [D]. Riverside: University of California(Master’s thesis), 2010.
[10] Schreiber M, Knoppel C, Franke U. Laneloc: Lane marking based localization using highly accurate maps [J]. IEEE Xplore, 2013,36(1): 449–454.
[11] Guo H Z, Meguro J I, Kojima Y, et al. Automatic lane-level map generation for autonomous robotic cars and advanced driver assistance systems using low-cost sensors [C]. Hong Kong: IEEE International Conference on Robotics & Automation ICRA, 2014.
[12] Bender P, Ziegler J, Stiller C. Lanelets: Efficient map representation for autonomous driving [J]. Intelligent Vehicles Symposium, 2014 (3): 420–425.
[13] 彭璇, 王夢媛, 曾潔茹, 等. 高精度北斗定位技術在交管執法取證中的應用研究 [J]. 電子技術應用, 2017, 43(4): 21–23.Peng X, Wang M Y, Zeng J R, et al. Application of high precision BDS positioning technology for traff i c management law enforcement and evidence collection [J]. Application of Electronic Technique, 2017, 43(4): 21–23.
[14] Shi W S, Cao J, Zhang Q, et al. Edge computing: Vision and challenges [J]. IEEE Internet of Things Journal, 2016, 3(5): 637–646.
[15] 施巍松, 孫輝, 曹杰, 等. 邊緣計算: 萬物互聯時代新型計算模型[J]. 計算機研究與發展, 2017, 54(5): 907–924.Shi W S, Sun H, Cao J, et al. Edge computing: An emerging computing model for the Internet of everything era [J]. Journal of Computer Research and Development, 2017, 54(5): 907–924.