基于STIM132的涂布儀蠕動泵控制器設(shè)計(jì)
2018-06-07 06:48:48王運(yùn)牛宗超
無線互聯(lián)科技 2018年1期
王運(yùn) 牛宗超
摘要:文章設(shè)計(jì)了以STM32為核心的涂布儀蠕動泵控制系統(tǒng),通過4.3寸觸摸屏控制信號對57型號步進(jìn)電機(jī)進(jìn)行細(xì)分控制,系統(tǒng)運(yùn)行時可隨時改變步進(jìn)電機(jī)的運(yùn)行方式,包括轉(zhuǎn)動方向、轉(zhuǎn)動速率及轉(zhuǎn)矩數(shù),達(dá)到精準(zhǔn)實(shí)時控制蠕動泵步進(jìn)電機(jī)的目的。
關(guān)鍵詞:STM32;控制器;蠕動泵
目前涂料自動涂布儀應(yīng)用廣泛,其中涂布儀中蠕動泵控制技術(shù)也得到了相應(yīng)的發(fā)展,本項(xiàng)目研制了一種基于STM32的蠕動泵控制器。其主要功能是實(shí)現(xiàn)針對涂料涂布實(shí)驗(yàn)中對流體的準(zhǔn)確高效計(jì)量控制。制作出一款精密輸送液體的電子蠕動泵分液系統(tǒng),專為微生物實(shí)驗(yàn)室中各種試劑溶液(培養(yǎng)基、緩沖液、稀釋液等)的精確計(jì)量和分裝使用,可被廣泛應(yīng)用于各種生物、化工企業(yè)、政府檢測機(jī)構(gòu)和科研單位的專業(yè)微生物實(shí)驗(yàn)室。
1 控制工作原理
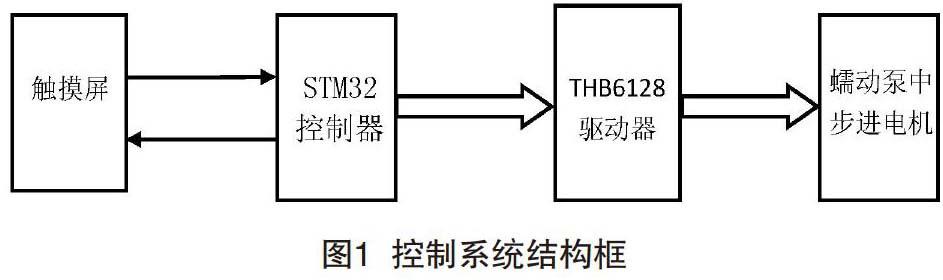
自動涂布儀中蠕動泵可以實(shí)現(xiàn)精確控制液體輸送的裝置,方便驅(qū)動液體流動。STM32最小系統(tǒng)控制步進(jìn)電機(jī)驅(qū)動器驅(qū)動蠕動泵,該方法可靠穩(wěn)定、成本低,本設(shè)計(jì)采用“STM32控制系統(tǒng)+步進(jìn)電機(jī)驅(qū)動器+串口觸摸屏”方案,通過電路設(shè)計(jì)和軟件開發(fā)精確控制蠕動泵。該系統(tǒng)以步進(jìn)電機(jī)控制器為核心,利用觸摸屏實(shí)現(xiàn)可視化操作。利用STM32內(nèi)部定時器產(chǎn)生脈沖作為控制信號,改變控制信號的頻率,進(jìn)而控制步進(jìn)電機(jī)的轉(zhuǎn)速等,脈沖信號決定了步進(jìn)電機(jī)的啟動、停止以及轉(zhuǎn)向。系統(tǒng)結(jié)構(gòu)如圖1所示。
2 硬件電路部分
該控制系統(tǒng)可實(shí)現(xiàn)觸摸屏操控,系統(tǒng)硬件電路由控制和驅(qū)動部分組成。控制部分主要完成控制信號的輸入、脈沖的輸出及狀態(tài)顯示;驅(qū)動部分主要通過增加電路驅(qū)動功率實(shí)現(xiàn)驅(qū)動步進(jìn)電機(jī)。由圖1可知,系統(tǒng)硬件具體包括STM32最小系統(tǒng)、THB6128芯片驅(qū)動電路、串口觸摸屏、兩相混合式步進(jìn)電機(jī)4部分,硬件電路外圍元件少、集成度高。
2.1控制電路部分
控制電路設(shè)計(jì)包括STM32最小系統(tǒng)及相關(guān)外圍電路,完成輸入信號處理及控制脈沖、液晶控制信號的輸出。選用的STM32芯片具有以下優(yōu)點(diǎn):性能高、成本低、功耗低,采用ARM Cortex-M3內(nèi)核。
2.2驅(qū)動電路部分
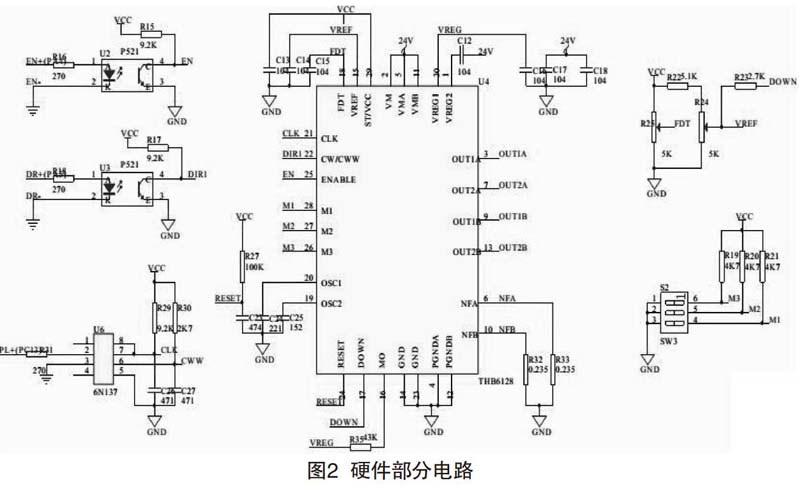
驅(qū)動電路實(shí)質(zhì)是電子技術(shù)的應(yīng)用,主要完成弱電到強(qiáng)電的放大。步進(jìn)電機(jī)驅(qū)動本質(zhì)是將邏輯電平變換為電機(jī)繞組需要的具有一定功率的電流信號。驅(qū)動芯片選擇東芝公司生產(chǎn)的高細(xì)分兩相混合式步進(jìn)電機(jī)驅(qū)動專用芯片THB6128,可實(shí)現(xiàn)細(xì)分設(shè)定,由STM32輸出控制信號實(shí)現(xiàn)驅(qū)動57系列步進(jìn)電機(jī)。該硬件電路如圖2所示。
3 觸摸屏界面部分
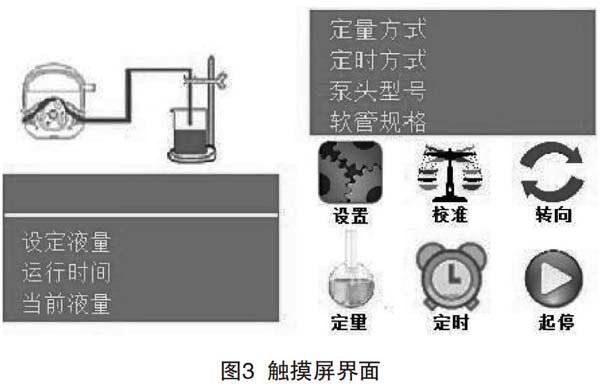
人機(jī)界面部分采用廣州大彩公司的觸摸屏,其組態(tài)軟件易于上手,非常方便用戶設(shè)計(jì)友好的人機(jī)界面。該系統(tǒng)中,STM32電路部分由串口協(xié)議與觸摸屏進(jìn)行通信,人機(jī)界面設(shè)計(jì)如圖3所示。
4 系統(tǒng)軟件部分
系統(tǒng)軟件總體結(jié)構(gòu)模塊化,各功能模塊相對獨(dú)立,便于程序的編寫、調(diào)試及功能擴(kuò)展。根據(jù)功能要求,軟件部分由初始化模塊、調(diào)速模塊、觸摸屏顯示模塊等組成。系統(tǒng)核心軟件是步進(jìn)電機(jī)控制程序,控制系統(tǒng)在初始化后,進(jìn)入主循環(huán)查詢指令隊(duì)列程序,觸摸屏信號作為觸發(fā)條件觸發(fā)主程序中的功能模塊,調(diào)用對應(yīng)的功能子程序。軟件主程序流程如圖4所示。
5 結(jié)語
本項(xiàng)目通過步進(jìn)電機(jī)驅(qū)動涂布儀中的蠕動泵,觸摸屏界面可操作步進(jìn)電機(jī)的開始、停止,控制步進(jìn)電機(jī)的速度和方向。通過細(xì)分設(shè)置驅(qū)動芯片,采用脈寬調(diào)制技術(shù)方式驅(qū)動57步進(jìn)電機(jī),提高步進(jìn)電機(jī)穩(wěn)定性。
本文致力于研究將蠕動泵技術(shù)應(yīng)用于涂布儀控制的分液過程當(dāng)中,以STM32為核心的蠕動泵裝置完成分液量準(zhǔn)確控制,運(yùn)動控制器和觸摸屏構(gòu)建的電控系統(tǒng)來總體協(xié)調(diào)控制,成功研制了一臺面向涂料涂布實(shí)驗(yàn)應(yīng)用的全自動化蠕動式涂布儀樣機(jī),實(shí)現(xiàn)了友好的人機(jī)界面操作和及時的運(yùn)動控制器通信效果。整個系統(tǒng)控制方法簡易切實(shí)可行,控制器結(jié)構(gòu)簡單可靠、性價比高,具有良好的實(shí)用推廣價值。