機(jī)器人用RV減速器曲柄軸彎曲應(yīng)力分析
2018-06-06 09:25:55劉珂熒吳鑫輝馮長建李文龍大連工業(yè)大學(xué)機(jī)械工程與自動(dòng)化學(xué)院遼寧大連6034大連民族大學(xué)機(jī)電工程學(xué)院智能感知與先進(jìn)控制國家民委重點(diǎn)實(shí)驗(yàn)室遼寧大連6605
大連民族大學(xué)學(xué)報(bào) 2018年3期
關(guān)鍵詞:有限元
劉珂熒,吳鑫輝,馮長建,李文龍(. 大連工業(yè)大學(xué) 機(jī)械工程與自動(dòng)化學(xué)院,遼寧 大連 6034;.大連民族大學(xué) 機(jī)電工程學(xué)院 智能感知與先進(jìn)控制國家民委重點(diǎn)實(shí)驗(yàn)室,遼寧 大連 6605)
在RV減速器傳動(dòng)效率測試試驗(yàn)中,施加額定載荷,同向連續(xù)運(yùn)轉(zhuǎn)18個(gè)小時(shí),當(dāng)繼續(xù)加載到額定負(fù)載的120% (1 040 N·m),運(yùn)轉(zhuǎn)到第5分鐘時(shí),三個(gè)曲柄軸幾乎同時(shí)斷裂,試驗(yàn)過程中曲柄軸斷裂的情況如圖1。為了分析額定負(fù)載工況下曲柄軸彎曲應(yīng)力,改進(jìn)曲柄軸結(jié)構(gòu)設(shè)計(jì),本文采用理論計(jì)算和有限元分析分別計(jì)算曲柄軸彎曲應(yīng)力。基于有限元法,建立RV減速器有限元裝配模型,對(duì)曲柄軸彎曲應(yīng)力進(jìn)行有限元分析,有限元分析能夠考慮到擺線輪變形、曲柄軸承滾子變形和曲柄軸變形對(duì)不同位置的曲柄軸受力的影響,使得曲柄軸彎曲應(yīng)力分析更加接近工程實(shí)際。

圖1 斷裂的曲柄軸
1 曲柄軸彎曲強(qiáng)度理論計(jì)算
取RV減速器中任一曲柄軸及與其相固連的行星輪為研究對(duì)象,曲柄軸及行星輪的受力簡圖[1]如圖2。

圖2 曲柄軸及行星輪受力簡圖
根據(jù)曲柄軸及行星輪的受力簡圖列出關(guān)于x、y方向的力與力矩平衡方程:
∑Fx=0,
Fgr-FG1r-FG2r=0 ;
(1)
∑Fy=0,
Fgt+FA2+FD2-FG1t-FG2t=0 ;
(2)
∑Mx(F)=0,
FA2(a1+b+c)+FD2(a1+c)+FA1cos(θ-αc)(a1+b+c)-FD1cos(θ-αc)(a1+c)-FG1t(a1+a2+b+c)-FG2tc=0 ;
(3)
∑My(F)=0,
FG1r(a1+a2+b+c)+FG2rc+FA1sin(θ-αc)(a1+b+c)-FD1sin(θ-αc)(a1+c)=0 。
(4)
聯(lián)立式(1)~(4),求解得到曲柄軸支撐軸承的支反力FG1t、FG1r、FG2t和FG2r。
FGt={FA2(a1+b+c)+FD2(a1+c)-(Fgt+FA2+FD2)c+[FA1(a1+b+c)-FD1(a1+c)]cos(θ-αc)}/(a1+a2+b) ;
(5)
FG1r={[FA1(a1+b+c)-FD1(a1+c)]sin(θ-αc)-Fgrc}/(a1+a2+b) ;
(6)
FG2t=Fgt+FA2+FD2-FG1r;
(7)
FG2r=Fgr-FG1r。
(8)
通過求解得到曲柄軸旋轉(zhuǎn)一周,曲柄軸支撐軸承的支撐反力的變化趨勢如圖3。

圖3 曲柄軸支撐軸承支反力
根據(jù)試驗(yàn)過程中曲柄軸的斷裂情況,選擇研究的危險(xiǎn)截面位置如圖4中截面Ⅰ。

圖4 危險(xiǎn)截面示意圖
危險(xiǎn)截面Ⅰ處繞x軸彎矩
Mx=FG2t(a1+a2+b-28)+Fgt(a1+a2+b+c-28) 。
(9)
危險(xiǎn)截面Ⅰ處繞y軸彎矩
My=FG2r(a1+a2+b-28)+Fgr(a1+a2+b+c-28) 。
(10)
危險(xiǎn)截面Ⅰ處合成彎矩
(11)
通過計(jì)算得到曲柄軸旋轉(zhuǎn)一周,危險(xiǎn)截面Ⅰ處合成彎矩變化趨勢如圖5。

圖5 危險(xiǎn)截面Ⅰ處合成彎矩
Mmax=1.488 2×104N·mm 。
(12)
危險(xiǎn)截面Ⅰ處繞z軸轉(zhuǎn)矩
(13)
曲柄軸在工作過程中同時(shí)承受彎矩和轉(zhuǎn)矩的作用,屬于復(fù)雜應(yīng)力狀態(tài),轉(zhuǎn)矩按脈動(dòng)循環(huán)變化計(jì)算,應(yīng)用軸類零件彎扭校核公式
(14)

考慮應(yīng)力集中的最大彎曲應(yīng)力
σmax=ασ·σ=173.25 MPa 。
(15)
式中,應(yīng)力集中系數(shù)ασ=3.5。
將異形刀片加工成形,安裝到實(shí)際割草車上開展試驗(yàn)研究,驗(yàn)證其割草效果。雖刀片扭矩有一定下降,但刀口的切割速度依然很高,實(shí)際割草效果仍能達(dá)到要求。經(jīng)試驗(yàn)測試結(jié)果表明,優(yōu)化后刀片上的扭矩減小了18%左右,與仿真計(jì)算的誤差小于5%,證明仿真結(jié)果有效。另外刀片功率減小了216 W,節(jié)能約8.5%,達(dá)到了滿意的節(jié)能效果。圖15(a)是試驗(yàn)用割草車,圖15(b)是優(yōu)化后的異形刀片。
2 曲柄軸彎曲應(yīng)力有限元分析
RV傳動(dòng)是由漸開線行星傳動(dòng)與擺線針輪行星傳動(dòng)組成的一個(gè)完整的封閉式差動(dòng)機(jī)構(gòu)體系,如果只把曲柄軸從機(jī)構(gòu)中單獨(dú)取出來進(jìn)行有限元計(jì)算,那么機(jī)構(gòu)體系中幾個(gè)重要計(jì)算對(duì)象之間的相互影響就很難準(zhǔn)確地反映到計(jì)算模型中,計(jì)算結(jié)果也將失去一些精度。為避免上述缺陷,在計(jì)算模型中應(yīng)將擺線輪、曲柄軸、曲柄軸承和行星輪同時(shí)引入計(jì)算[2-3],這樣才能使計(jì)算結(jié)果更加準(zhǔn)確可靠。
2.1 計(jì)算方案確定
RV減速器中曲柄軸的自轉(zhuǎn)將轉(zhuǎn)速轉(zhuǎn)矩輸入第二級(jí)擺線針輪傳動(dòng),同時(shí)曲柄軸將擺線輪自轉(zhuǎn)產(chǎn)生的轉(zhuǎn)速轉(zhuǎn)矩輸出,即在RV減速器中曲柄軸既受到轉(zhuǎn)矩的作用,產(chǎn)生扭轉(zhuǎn)變形,又受到兩擺線輪沿曲柄軸承孔分布圓周切向力的作用,引起曲柄軸在此方向上的彎曲變形[4]。
RV減速器實(shí)際傳動(dòng)過程是一個(gè)多體接觸問題,因?yàn)橥暾挠?jì)算模型接觸部分太多,非線性計(jì)算收斂困難,因此將針齒和針齒殼簡化,把嚙合力直接作用在兩個(gè)擺線輪的理論嚙合點(diǎn)上,可以依據(jù)嚙合位置的不同,對(duì)任意個(gè)齒面施加任意變化的嚙合力進(jìn)行計(jì)算。
2.2 RV減速器有限元裝配模型建立
2.2.1 基本設(shè)計(jì)參數(shù)
RV減速器設(shè)計(jì)參數(shù)見表1,零件材料屬性見表2。
表1 RV減速器設(shè)計(jì)參數(shù)

表2 零件材料屬性
2.2.2 裝配模型建立
機(jī)器人用RV減速器是高精密減速器,對(duì)建模精度要求很高,曲柄軸承的滾柱直徑5 mm,寬度8 mm,14個(gè)滾柱均勻分布,軸承徑向間隙取0.016 mm。3個(gè)行星輪用節(jié)圓代替與曲柄軸連接,裝配模型如圖6。

(a)A面視圖 (b)B面視圖
2.2.3 有限元網(wǎng)格劃分
有限元網(wǎng)格的疏密影響計(jì)算結(jié)果的精度,考慮到兩片擺線輪是主要傳遞載荷零件,擺線輪齒部分網(wǎng)格劃分較密,可以真實(shí)地反映局部的應(yīng)力與變形情況[5]。考慮到擺線輪上曲柄軸孔作為曲柄軸承的外圈,傳遞扭矩過程中,與軸承滾子接觸傳力,所以擺線輪上曲柄軸孔表面網(wǎng)格劃分較密,曲柄軸與曲柄軸承滾子接觸傳力,因此曲柄軸表面網(wǎng)格細(xì)化,所有零件均采用六面體網(wǎng)格。
2.2.4 邊界條件和載荷施加
根據(jù)擺線針輪傳動(dòng)受力分析理論[6]計(jì)算得出,同時(shí)嚙合的齒數(shù)為9個(gè),齒號(hào)為2-10號(hào),受力結(jié)果見表3。
將擺線輪齒面嚙合力分別作用在9個(gè)齒面上,在理論齒面嚙合線上均勻分布。在行星輪的嚙合節(jié)點(diǎn)處按嚙合力方向進(jìn)行約束,模擬太陽輪對(duì)行星輪的嚙合力。曲柄軸兩端圓錐滾子軸承按簡支承處理。擺線輪上曲柄軸孔與曲柄軸承各滾子之間的接觸,曲柄軸與曲柄軸承滾子之間的接觸,均采用“面對(duì)面”的接觸單元模擬它們的彈性接觸[7-10],RV減速器有限元裝配模型如圖7。

表3 擺線輪受力理論分析結(jié)果

(a)A面視圖 (b)B面視圖
2.3 有限元計(jì)算結(jié)果分析
規(guī)定圖8中右上方的曲柄軸為1號(hào)曲柄軸,左上方的曲柄軸為2號(hào)曲柄軸,下方的曲柄軸為3號(hào)曲柄軸。
(1)當(dāng)兩片擺線輪的載荷相同時(shí),曲柄軸最大應(yīng)力分布如圖8。
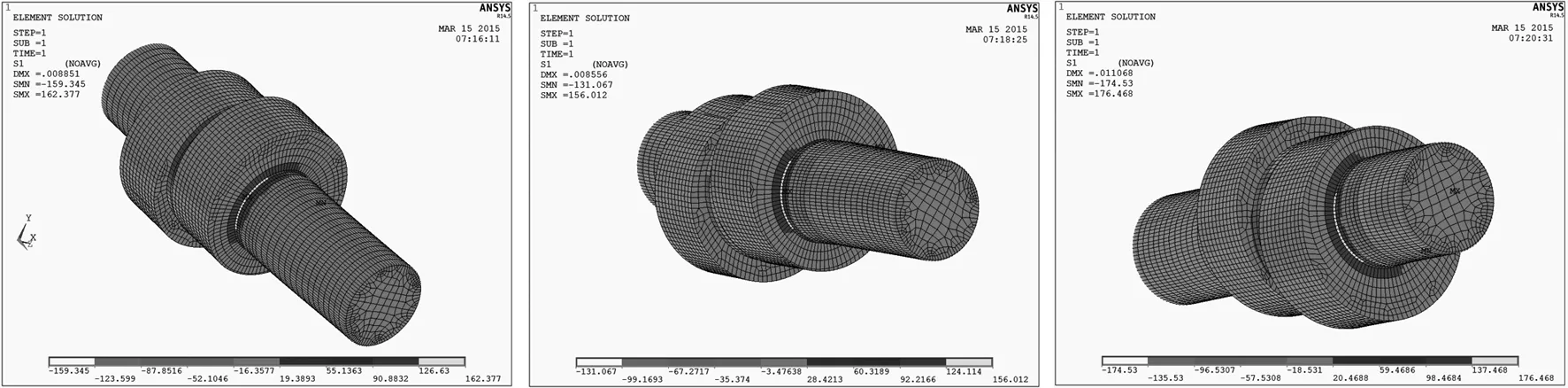
(a)1號(hào)偏心軸 (b)2號(hào)偏心軸 (c)3號(hào)偏心軸
1號(hào)曲柄軸的最大彎曲應(yīng)力為162.377 MPa,最大應(yīng)力的位置發(fā)生在曲柄軸與偏心凸輪的交匯處;2號(hào)曲柄軸的最大彎曲應(yīng)力為156.012 MPa,最大應(yīng)力的位置發(fā)生在曲柄軸與偏心凸輪的交匯處;3號(hào)曲柄軸的最大彎曲應(yīng)力為176.468 MPa,最大應(yīng)力的位置發(fā)生在曲柄軸與偏心凸輪的交匯處。
(2)當(dāng)輸入端擺線輪的轉(zhuǎn)矩為額定轉(zhuǎn)矩的55%,而輸出端擺線輪的轉(zhuǎn)矩為額定轉(zhuǎn)矩的45%時(shí),偏心軸最大應(yīng)力分布如圖9。

(a)1號(hào)曲柄軸 (b)2號(hào)曲柄軸 (c)3號(hào)曲柄軸
1號(hào)曲柄軸的最大彎曲應(yīng)力為148.073 MPa,最大應(yīng)力的位置發(fā)生在曲柄軸與偏心凸輪的交匯處;2號(hào)曲柄軸的最大彎曲應(yīng)力為141.243 MPa,最大應(yīng)力的位置發(fā)生在曲柄軸與偏心凸輪的交匯處;3號(hào)曲柄軸的最大彎曲應(yīng)力為188.14 MPa,最大應(yīng)力的位置發(fā)生在曲柄軸與偏心凸輪的交匯處。
由上述分析可以看出,有限元分析結(jié)果與理論分析結(jié)果誤差很小,在額定載荷工況下,3個(gè)曲柄軸的最大應(yīng)力是不同的,在145~180 MPa之間,最大應(yīng)力的位置都發(fā)生在曲柄軸與偏心凸輪的交匯處,說明曲柄軸應(yīng)力集中明顯,因?yàn)榍S的結(jié)構(gòu)是嚴(yán)格按照設(shè)計(jì)圖紙尺寸建立的模型。
不同的擺線輪載荷分配情況下,計(jì)算得到的曲柄軸彎曲應(yīng)力值不同,說明曲柄軸的彎曲應(yīng)力狀態(tài)對(duì)零部件加工誤差和軸承間隙比較敏感。
3 結(jié) 論
(1)建立了考慮主要零部件之間的相互接觸,行星輪、曲柄軸承、曲柄軸以及擺線輪變形的RV減速器有限元裝配模型,利用該模型可以高效而準(zhǔn)確地分析曲柄軸彎曲應(yīng)力情況。
(2)RV減速器零部件加工誤差和曲柄軸承間隙對(duì)曲柄軸的應(yīng)力狀態(tài)影響很大,在額定載荷工況下,3個(gè)曲柄軸的最大應(yīng)力是不同的,最大應(yīng)力的位置都發(fā)生在曲柄軸與偏心凸輪的交匯處,曲柄軸應(yīng)力集中明顯,應(yīng)通過適當(dāng)增大過渡圓角和優(yōu)選熱處理工藝以減小曲柄軸最大彎曲應(yīng)力,提高曲柄軸彎曲強(qiáng)度。
參考文獻(xiàn):
[1] 李力行. 擺線針輪行星傳動(dòng)的齒形修正與受力分析[J]. 機(jī)械工程學(xué)報(bào),1986(1):18-23.
[2] 何衛(wèi)東,吳鑫輝,盧琦. RV傳動(dòng)中擺線輪及曲柄軸承有限元分析[J]. 大連交通大學(xué)學(xué)報(bào),2016(4):67-71.
[3] 陳兵奎,譚磊,鐘暉. 擺線包絡(luò)行星傳動(dòng)接觸有限元分析及系統(tǒng)開發(fā)[J]. 機(jī)械強(qiáng)度,2013,35(3):366-371.
[4] 李力行,何衛(wèi)東,王秀琦,等.機(jī)器人用高精度RV傳動(dòng)的研究[J]. 大連鐵道學(xué)院學(xué)報(bào),1999,20(2):1-3.
[5] 伍迪,張有忱. 基于ANSYS 的多齒差擺線齒輪有限元分析[J]. 機(jī)械設(shè)計(jì),2009,26(5) : 40-41.
[6] 何衛(wèi)東,李力行,徐永賢,等. 高精度RV傳動(dòng)的受力分析及傳動(dòng)效率[J]. 機(jī)械工程學(xué)報(bào),1996(4):104-110.
[7] 楊生華. 齒輪接觸有限元分析[J]. 計(jì)算力學(xué)學(xué)報(bào),2003,20(2):189-194.
[8] 徐彬,陳南,王輝,等. 基于接觸單元法的復(fù)雜機(jī)構(gòu)有限元分析[J].東南大學(xué)學(xué)報(bào):自然科學(xué)版,2009,39(3) :495-501.
[9] GUO Y, PARKER R G. Stiffness matrix calculation of rolling element bearings using a finite element/contact mechanics model. Mechanism and Machine Theory, 2012(51): 32-45.
[10] 吳鑫輝. 機(jī)器人用RV減速器齒形優(yōu)化新方法及傳動(dòng)精度研究[D]. 大連:大連交通大學(xué),2016.
猜你喜歡
艦船科學(xué)技術(shù)(2022年20期)2022-11-28 08:19:18
數(shù)學(xué)物理學(xué)報(bào)(2022年4期)2022-08-22 04:09:28
減速頂與調(diào)速技術(shù)(2020年4期)2020-11-22 07:20:26
上海節(jié)能(2020年3期)2020-04-13 13:16:16
石油化工建設(shè)(2019年6期)2020-01-16 08:03:42
天津醫(yī)科大學(xué)學(xué)報(bào)(2019年6期)2019-08-13 07:04:32
鍛壓裝備與制造技術(shù)(2016年3期)2016-06-05 09:36:08
機(jī)械工程師(2015年10期)2015-02-02 01:14:03
機(jī)電產(chǎn)品開發(fā)與創(chuàng)新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18
