廄肥撒施機監控系統的研制
2018-06-06 03:55:54孫永佳沈景新李青龍竇青青
農機化研究 2018年6期
張 鵬,孫永佳,沈景新,李青龍,陳 剛,竇青青
(1.雷沃重工股份有限公司,山東 濰坊 261200;2.山東省農業機械科學研究院,濟南 250100)
0 引言
廄肥也叫圈肥、欄肥,是指以家畜糞尿為主,混以各種墊圈材料積制而成的肥料,是最主要的有機肥料。廄肥的施用可增進土壤的活化性及透氣性,提高土壤的保水,緩解土壤板結化,改善土壤理化性能,提高地力,實現增產增效。國內傳統的廄肥的撒施主要采用人工拋灑,勞動強度大,效率低,不適應現代農業的要求。現有施肥機大多由拋撒化肥的設備改制而成,缺少智能化監控裝置,物料狀態無法實時監測,拋撒幅度無法實時調節,適應性差,無法滿足不同地塊和土壤狀況對廄肥拋撒的需求。因此,研制與廄肥撒施機配套的智能化監控系統顯得極為重要[1-4]。
為了解決上述問題,設計了一款廄肥撒施機監控系統,可以根據作業地塊大小和土壤狀況通過觸摸屏設定施肥量、拋撒幅度和出料口高度,拋撒過程中根據作業速度自動調節施肥量,保證實際施肥量與設定施肥量一致。廄肥料斗裝有監視系統,對裝料、卸料過程進行實時監測。當廄肥裝滿料斗或缺料時,監測系統發出警報聲音;物料堵塞時,發出警報并啟動自動疏通裝置進行疏通。控制器實時采集計算拋撒盤轉速、輸送裝置轉速、速度及作業面積等作業參數,并傳輸至觸摸屏進行顯示。
1 系統機械結構
廄肥撒施機主要由料斗總成、底盤行走系統、動力傳動系統、物料輸送拋撒系統及液壓系統等組成,如圖1所示。作業時,牽引架與拖拉機的后牽引裝置連接,液壓管路與拖拉機液壓輸出連接。
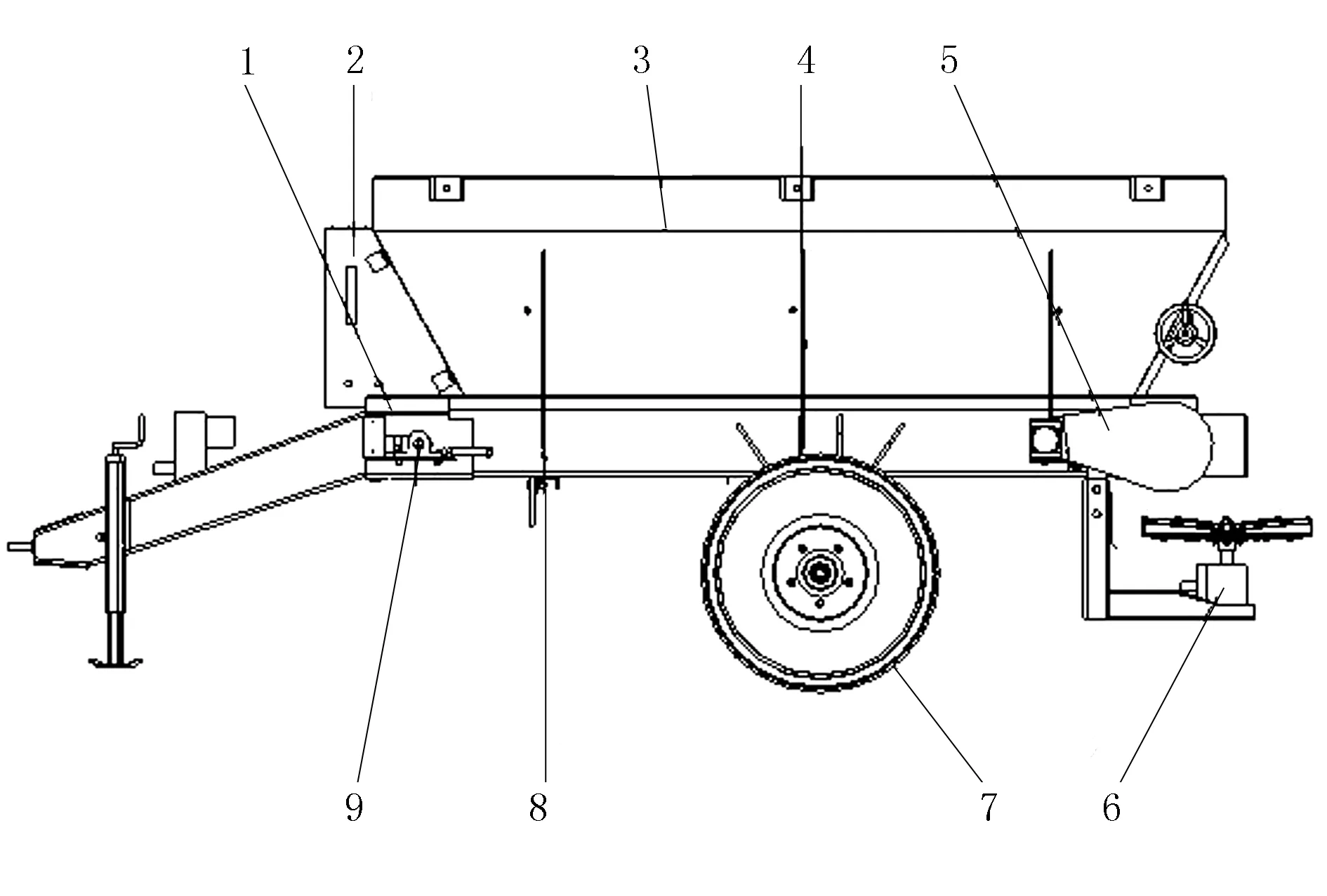
1.機架 2.液壓系統 3.料斗 4.筋板 5.輸送裝置 6.拋撒裝置 7.地輪 8.筋板 9.機動傳動圖1 廄肥撒施機結構示意圖
2 監控系統框圖
廄肥撒施機監控系統采用模塊化設計,主要由控制器、料斗、物料狀態監測模塊、轉速監測模塊、比例閥驅動模塊、物料堵塞疏通模塊和觸摸屏顯示模塊等組成, 如圖2所示。作業開始前,根據作業地塊大小和土壤狀況通過觸摸屏設定施肥量、拋撒幅度和出料口高度;參數設定完成后,監控系統開始輸出液壓系統驅動信號,進行物料輸送和拋撒,并實時監測拋撒盤轉速、輸送裝置轉速,轉速異常時進行報警提示;監測系統實時監測料斗中廄肥的變化情況,缺料時發出警報提示需裝料,物料堵塞時發出警報并啟動自動疏通裝置進行疏通。作業過程中,速度傳感器檢測均布于地輪圓周的測速螺母,并將檢測信號傳輸至控制器,由控制器按照設定的數學模型計算作業速度和作業面積等信息。
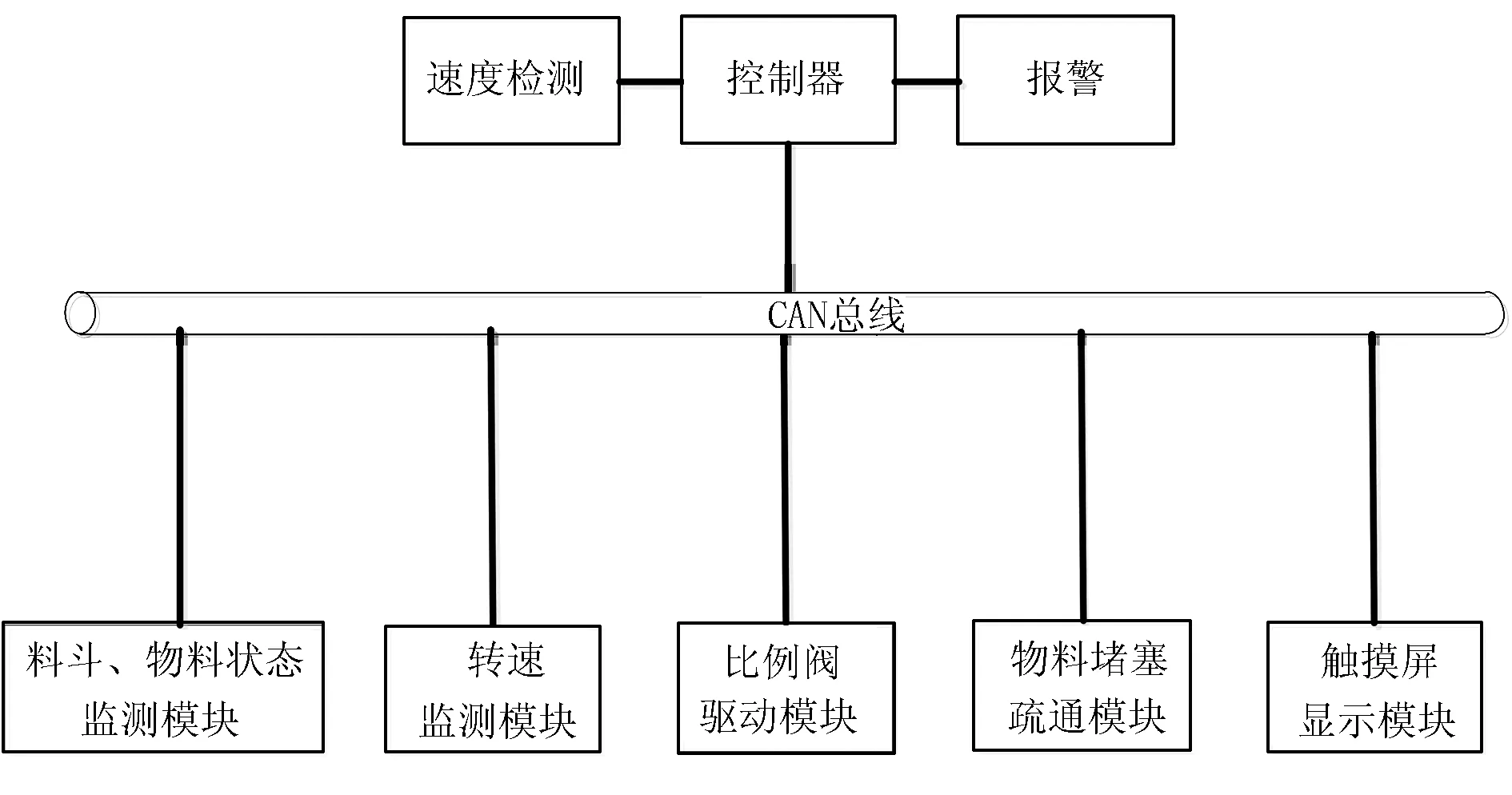
圖2 監控系統設計框圖
3 硬件設計
3.1 控制芯片
本文設計的監控系統的控制芯片選用TI公司的32位定點型DSP芯片—TMS320F2812。該芯片采用高性能的CMOS技術,CPU主頻高達150MHz,支持JTAG在線仿真接口,具有快速的中斷響應和中斷處理能力,滿足系統設計時驅動比例閥需要進行的復雜PID運算要求[5]。
3.2 電源電路
控制芯片TMS320F2812對電源要求很敏感,電源芯片輸出的電壓值要求必須穩定在3.3V和1.9V。其中,3.3V為Flash供電,1.9V為內核供電電源芯片。電源芯片上的電容要匹配好,否則可能導致電源芯片里的振蕩電路工作一段時間后停止振蕩。因此,本文選用電壓精度比較高的電源芯片TPS767D301,其輸入電壓為+5V,芯片正常起振后輸出3.3V和1.9V兩種電壓供DSP使用。圖3為電源產生電路。
3.3 物料堵塞疏通電路
物料堵塞時通過高振動力振動電機實現疏通,振動電機通過繼電器驅動,電路如圖4所示。控制芯片TMS320F2812輸出的驅動信號電壓為3.3V,經電源轉換芯片74LVC4245轉換為5V后進入達林頓管ULN2803。ULN2803是8路NPN達林頓連接晶體管陣,特別適用于低邏輯電平數字電路(如TTL、CMOS或PMOS/NMOS)和較高的電流/電壓要求之間的接口,是比較常見的繼電器驅動芯片,具有集電極開路輸出和續流箱位二極管,用于抑制躍變。繼電器選用歐姆龍公司的G6B-114,輸入驅動電壓為+5V,驅動電流可達5A,滿足設計需求。
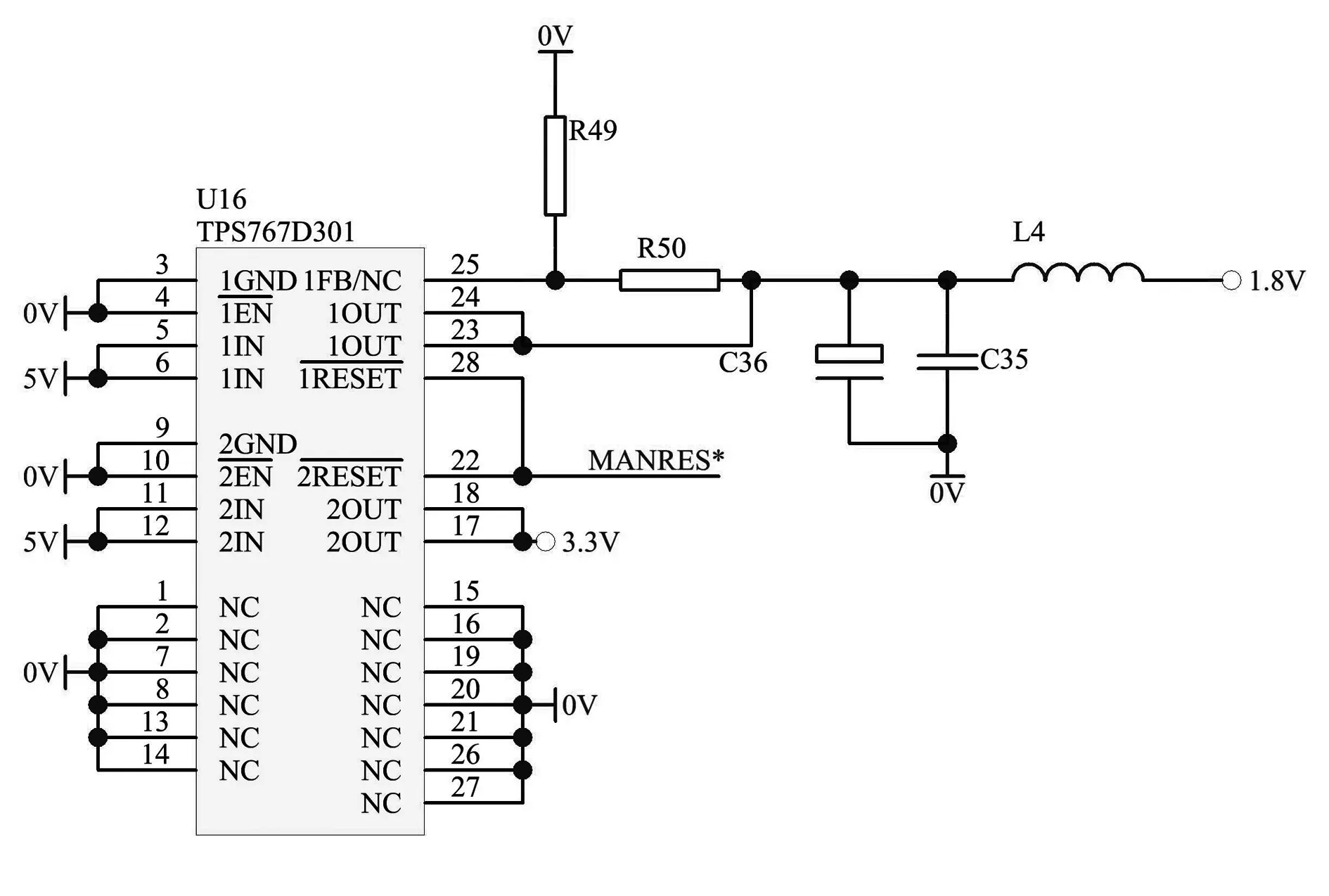
圖3 電源電路
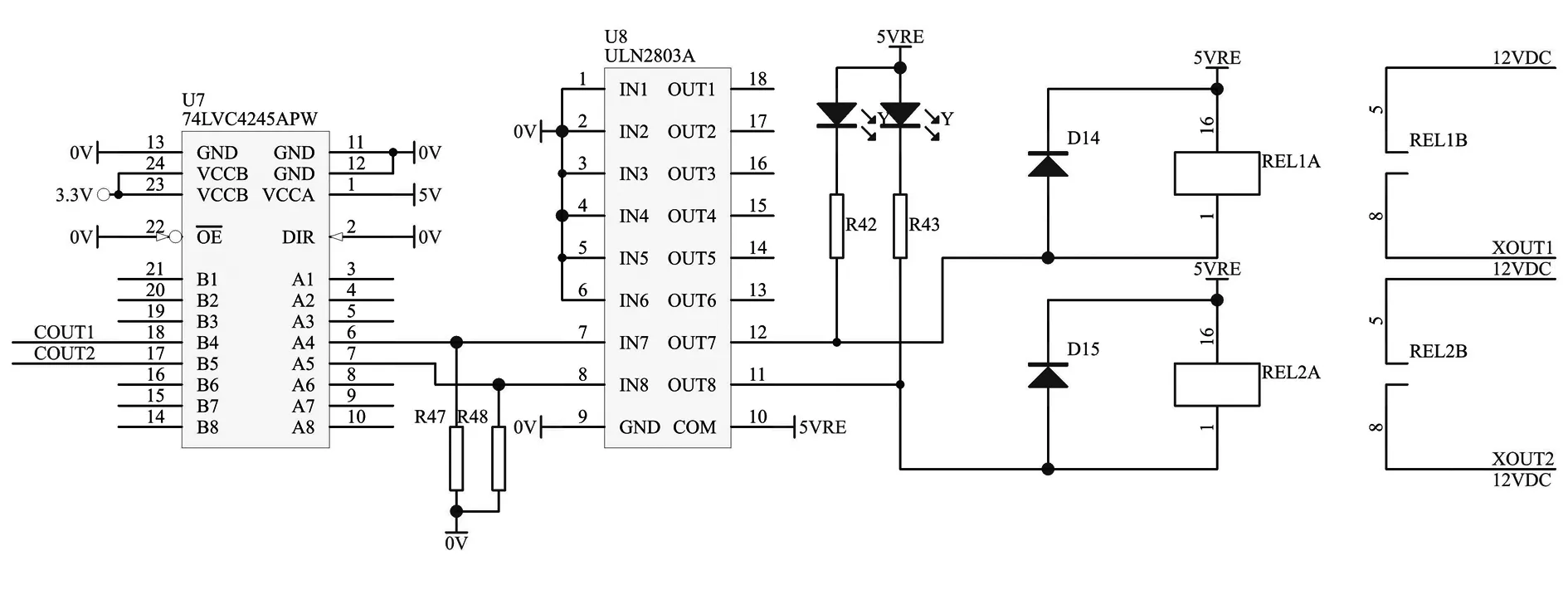
圖4 繼電器驅動電路
3.4 比例閥驅動電路
本文設計輸送裝置和拋撒裝置均采用比例電磁閥進行驅動,輸送速度和拋撒盤轉速可調,滿足不同地塊和土壤狀況的需求。驅動芯片選用英飛凌公司的大電流半橋高集成功率芯片BTS7960,它帶有一個P溝道的高邊MOSFET、一個N溝道的低邊MOSFET和一個驅動Ic,集成的驅動Ic具有邏輯電平輸入、電流診斷、斜率調節、死區時間產生,以及過溫、過壓、欠壓、過流、短路保護的功能。BTS7960通態電阻典型值為16mQ,內阻很小,散熱不厲害,驅動電流可達43A[6]。比例閥驅動電路如圖5所示。
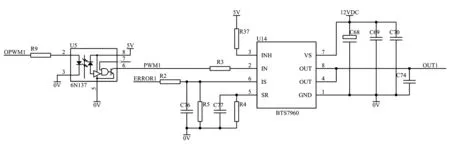
圖5 比例閥驅動電路
主芯片輸出的PWM信號經高速光耦6N137進行光電隔離,隔離后的PWM信號連接到BTS7960的IN引腳,OUT引腳輸出大電流驅動信號驅動比例閥。BTS7960的引腳Is具有電流檢測功能,正常模式下,從Is引腳流出的電流與流經高邊MOS管的電流成正比。在故障條件下,Is引腳輸出高電平,通過該引腳的狀態可以判斷驅動芯片是否正常工作。
3.5 轉速監測電路
地輪速度與轉速的測量原理相似,本文設計時均采用接近開關傳感器來實現。地輪、輸送鏈條和撒肥盤運轉時,傳感器輸出一定時間間隔的脈沖信號,通過軟件判斷脈沖信號的時間周期并結合對應的機械尺寸,即可計算出行駛速度和轉速,測量電路如圖6所示。脈沖信號經前端一階低通濾波電路及光耦進行濾波隔離,處理后的信號進入電平轉換芯片74LVC4245轉換為DSP對應的IO口電壓3.3V,DSP按照預定的數學模型進行速度與轉速計算[7]。
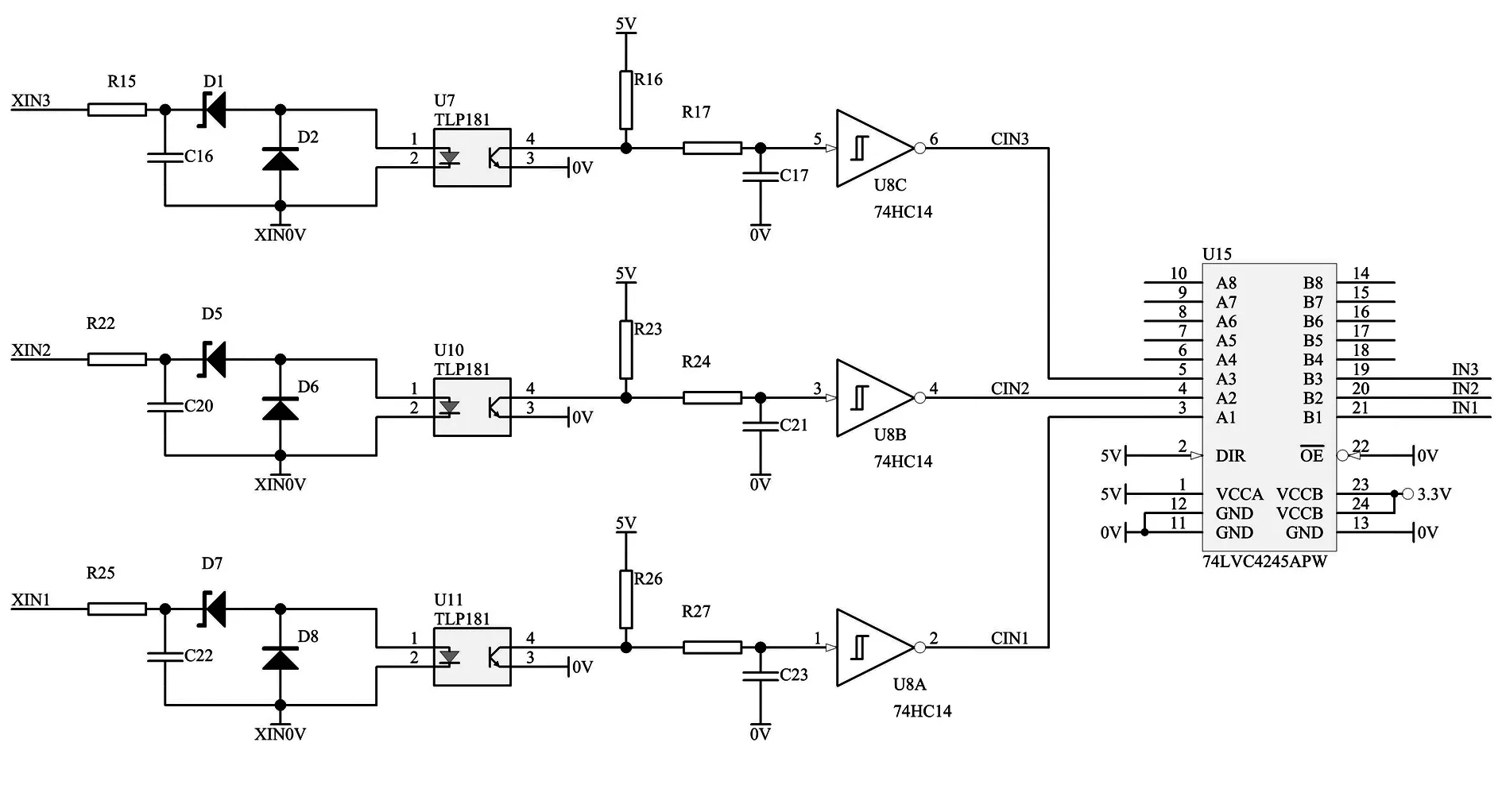
圖6 轉速監測電路
4 觸摸屏設計
本文設計的監控系統參數設置與顯示都通過觸摸屏來實現,觸摸屏選用迪文公司的DMT80480T070_16WT。該觸摸屏為7.0英寸800×480圖形點陣65K色,基于迪文K600+模塊,并搭載DUGS系統,供電電壓為6~+42V,與控制器之間通過CAN總線進行數據通訊[8]。觸摸屏顯示界面如圖7所示。

圖7 觸摸屏主界面
用戶可根據作業地塊和土壤狀況的實際情況,點擊觸摸屏上的施肥量、拋撒幅度及出料口高度設置作業參數,點擊設置按鍵后會彈出數字輸入鍵盤,如圖8所示。輸入設定量后點擊“Enter”,控制器通過對應的通訊協議即可解析出設定的參數值。開始作業后,監控系統實時監視廄肥撒施機的作業速度、撒播盤轉速、輸送裝置轉速,以及料斗、物料狀態等參數,并通過觸摸屏進行顯示。當監測到料斗缺料、滿料時,進行報警提示,并在觸摸屏對應位置顯示相應的報警字樣。當監測到物料堵塞時,觸摸屏物料狀態一欄顯示“堵塞”,控制器啟動疏通裝置,疏通成功后,屏上的“堵塞”字樣消失。
圖8 數字鍵盤
5 監控系統軟件設計
機具作業時,地輪開始轉動,傳感器輸出信號,控制器根據預設的公式計算作業速度和作業面積。
式中V—作業速度(m/s);
D—地輪直徑(m);
N—傳感器感應測速螺栓數;
T—傳感器捕獲相鄰2個脈沖的時間間隔。

式中S—作業面積(666.67m2);
D—地輪直徑(m);
N—傳感器感應測速螺栓數;
n—傳感器捕獲脈沖數;
L—作業幅寬(m)。
監控系統軟件程序流程如圖9所示。上電后,先初始化事件管理器,然后初始化定時器、PWM和eCAN模塊,初始化完畢后等待200μs定時中斷到來;在定時中斷里啟動eCAN通訊,讀取觸摸屏設定的施肥量、拋撒幅度和出料口高度等參數,讀取完畢后,系統開始工作并輸出PWM信號驅動輸送裝置和撒播盤;系統讀取傳感器輸出的脈沖信號,并進行速度、面積和轉速的計算,同時根據計算出的轉速判斷撒播盤和輸送裝置是否存在異常;轉速判斷為正常后,判斷出料口物料是否堵塞,堵塞則啟動自動疏通裝置進行疏通,物料狀態也正常時,判斷料斗是否缺料,缺料則進行缺料報警并停機裝料;都正常后,啟動eCAN發送程序,把作業參數發送到觸摸屏顯示。作業過程中,輸送裝置轉速、出料口高度根據作業速度的變化實時調節,保證不同作業速度下的施肥量與設定值保持一致。
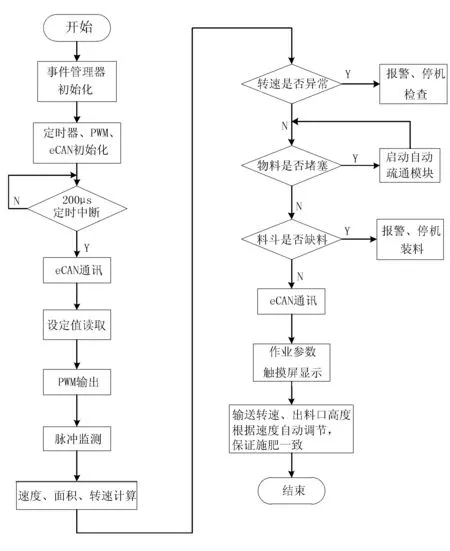
圖9 系統軟件流程圖
6 田間試驗與結果
6.1 試驗設計
本文設計的監控系統在鄒城市特力機械工具有限公司研制的2FX-3000型廄肥撒施機上進行了應用。為了檢驗監控系統的實際工作性能,進行了速度檢測與施肥量試驗。試驗在該公司試驗場進行,牽引動力為福田-80型拖拉機。
6.2 速度檢測試驗
試驗中,拖拉機在不同擋位下調整手油門,保持不同速度下勻速行駛50m,分別記錄行駛時間和觸摸屏顯示的行駛速度,按照V=S/t將計算出來的速度與系統顯示速度進行比較,結果如表1所示。
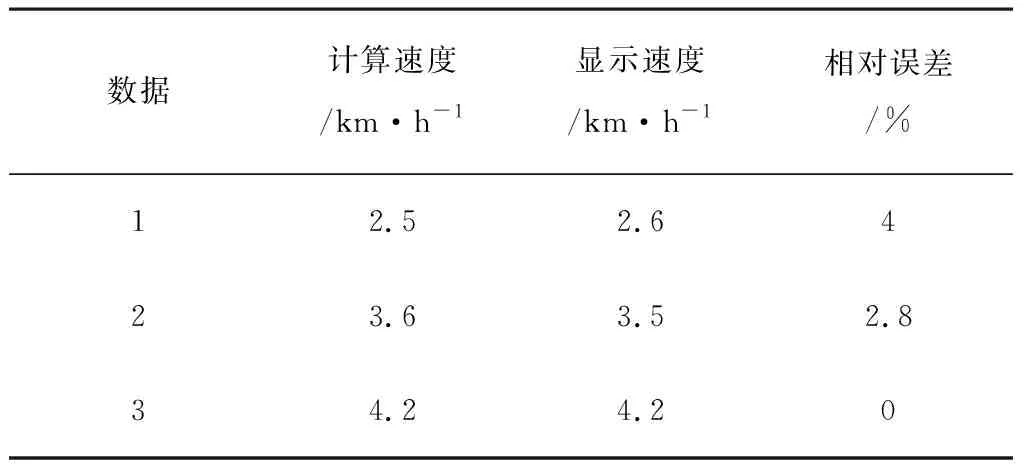
表1 速度檢測試驗結果
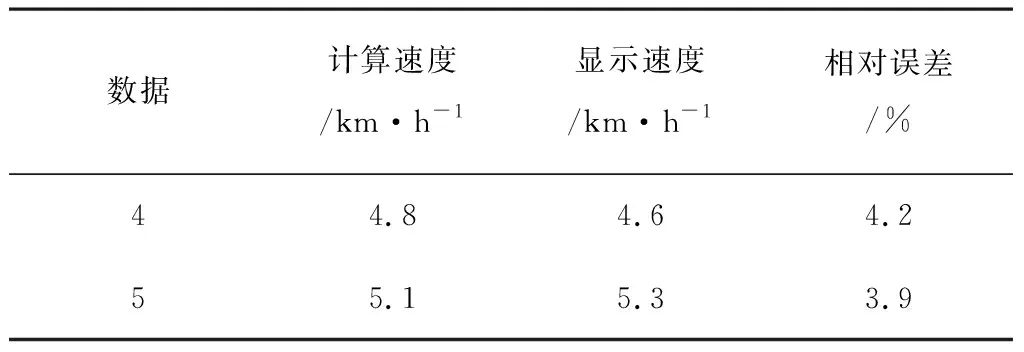
續表1
由表1可以看出:速度檢測最大相對誤差為4%,最小誤差為0,誤差均在5%以內。可見,系統測量的作業速度準確性比較高。
6.3 施肥量試驗
使用截面450mm×350mm、深100mm的接肥盒用于接拋撒下來的廄肥,采用二維矩陣收集的方法進行試驗。試驗中,拖拉機在4.2km/h的速度下勻速行駛50m,通過觸摸屏設定拋撒幅度為20m,并設定不同的施肥量,將設定施肥量與二維矩陣收集法計算出來的實際施肥量進行比較,結果如表2所示。
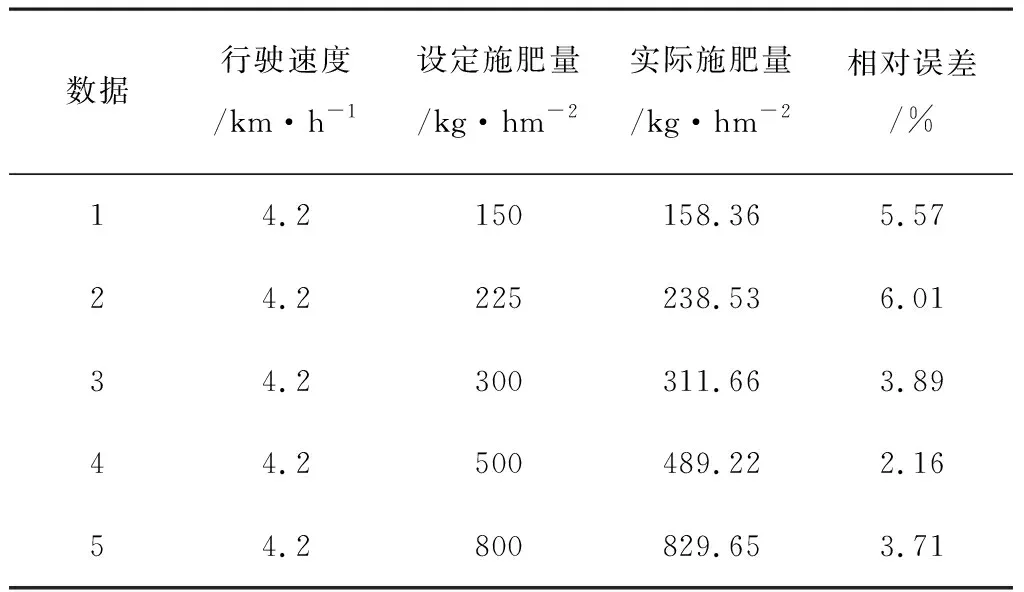
表2 施肥量試驗結果
由表2可知:本文設計的監控系統施肥效果較好,性能穩定,實際施肥量與設定施肥量的相對誤差最大值為6.01%,最小值為2.16%。較大誤差產生的原因主要是:廄肥收集時部分廄肥會從肥盒中碰撞彈出去,同時收集的廄肥里面含有石子,影響稱重的準確性。
7 結論
本文設計的廄肥撒施機監控系統具有系統工作穩定可靠,缺料、堵塞報警準確率高等特點。該系統的應用有效地解決了現有廄肥撒施機缺少智能化監控裝置、物料狀態無法實時監測、拋撒幅度無法實時調節,以及無法滿足不同地塊和土壤狀況需求等問題。該監控系統的研制極大地提高了畜禽糞便的綜合利用程度,加快了廄肥撒施機械的智能化進程,對促進我國農業可持續發展、減輕農民勞動強度及改善生態環境等都具有十分重要的意義。
參考文獻:
[1] 來永見,王巖,馮艷輝.介紹一種高效的農家肥施用機械--廄肥拋撒機[J].現代化農業,2014(4):50.
[2] 付宇超,袁文勝,張文毅,等.我國施肥機械化技術現狀及問題分析[J].農機化研究,2017,39(1):251-255.
[3] 趙家書.有機肥施肥機械的研究現狀與發展趨勢[J]. 湖南農業大學學報,2013,39(1):97-100.
[4] 趙睿,王秀,趙春江,等.鏈條輸送式變量施肥拋撒機的設計與試驗[J].農業工程學報,2012,28(6):20-25.
[5] 顧衛鋼. 手把手教你學DSP—基于TMS320X281X[M].北京:北京航空航天大學出版社,2011:32-34.
[6] 陳軍,楊數強,王軍強.一種新型智能車電機驅動電路的設計與實現[J].電子質量,2011(9):32-34.
[7] 李青龍,孫永佳,孫宜田,等.基于DSP的深松整地聯合作業機監控系統的研制[J].農機化研究,2016,38(11):118-122.
[8] 楊大奎,曹川川,譚修彥. 基于迪文DGUS屏在PM2.5自動換膜采樣器中的應用研究[J]. 山東工業技術,2016(22):15-16.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
故事大王(2016年7期)2016-09-22 17:30:08