基于紋理分割圖的草地分界線提取算法
2018-06-06 03:55:49邱富軍
農機化研究 2018年6期
邱富軍
(瀘州職業技術學院 電子工程系,四川 瀘州 646005)
0 引言
隨著科技的進步和農業的迅猛發展,智能控制已不斷融入各種生產與服務中。其中,智能割草機器人的發展尤為迅速,已從起初的最低端智能割草機發展到目前可實現環境感知、路徑規劃和行為控制的高端自動化智能割草作業。為此,國內外學者從各個方面、多個角度進行了深層次的試驗與研究,主要從智能割草機器人本身的機構控制水平及不斷改進傳感器等關鍵部件的計算精度與速度方面展開。丁毅等學者從割草機器人GPS/DR組合導航系統方面展開相關深入研究[1-2];劉立強等基于Open CV系統的模擬實驗方法對除草機器人圖像處理技術[3]進行探討;袁路路基于FPGA神經網絡[4]的方法對智能軌跡控制割草機器人設計。本文從智能割草機器人的作業場景入手,從改善智能機器人視覺識別角度出發,通過對圖像紋理特征分析,找出能較好適應智能割草機器人進行草地分界線提取的一種算法,為進一步更精準、自動實現路徑規劃與作業提供支撐。
1 紋理特征理論與方法
紋理[5]是圖像存在的分子級特征,難以確切描述和定量化,是智能機器人模擬人類視覺提取元素之一,也是重要的視覺線索。在進行草地圖像分割與處理分析過程中,紋理的相關特征及信息的準確識別顯得格外重要,通過利用各種單一分析方法或者多種方法相結合對草地圖像中存在的紋理特征信息進行有效分類、分割并提取分析,有助于找出更符合實際場景的圖像紋理信息。目前,圖像紋理分析方法的分類如圖1所示。

圖1 圖像紋理分析方法分類
各類圖像紋理方法的出發點不同,但是目標都是從多種角度使得分析更加精確化、更加符合草地的整體布局情況,通過智能割草機器人的有效識別,并進行高效率安全工作,達到自動割草作業的目標。
選取何種分析方法進行圖像紋理特征處理及提取方法優劣的判別主要取決于以下幾個參數:
1)紋理特征維數的劃分多少;
2)紋理劃分后差別的明顯程度;
3)圖像紋理分析劃分效果如何;
4)下一步算法的適用性及準確度;
5)指導實際應用的可采納性。
其中,1)、2)兩個步驟在進行圖像特征提取過程中所起作用最為關鍵,針對維數較多、紋理劃分后差別較不明顯的圖像,處理難度加大,同時劃分效果3)決定后續采取哪一種算法4);各個步驟緊密結合,最終可獲取較為優化的應用于實際草地場景5)的提取算法;之后進行符合實際的路徑規劃,實現智能割草機器人的自動割草作業。
2 提取算法試驗過程
2.1 圖像分割理論提取算法
圖像分割理論提取是第一步,通過智能機器人的攝像頭傳入機器人圖像處理及控制系統,經過一系列處理后依照采集的圖像紋理特征相關信息進行準確分割,采用適用性較強的提取算法,繼而控制智能機器人有效識別草地分界線,區分未割草區域與已割草區域,實現全區域、全覆蓋的割草作業;同時,在此作業過程中融合其他自動控制技術有效規避障礙物,實現全程自動作業。下面針對圖像分割理論提取算法做簡要介紹。
首先,針對智能割草機器人工作區域的界定,選取高端攝像頭,簡易攝像頭工作區域原理如圖2、圖3所示。由于攝像頭工作范圍自身存在缺陷,因此配備超聲波傳感器與紅外傳感器進行實時監測。超聲波傳感器對于50m之外草地范圍進行掃描傳輸回機器人控制,紅外線傳感器對于10~50m之內草地范圍進行掃描傳輸回機器人,以減少工作過程中出現盲區的范圍,實現最大限度的草地割草作業。

圖2 智能割草機器人前端攝像頭工作區域
圖像的顏色模型表征一種視覺效果,RGB模型是紅、綠、藍3種基色調組成的混合體,HSI模型表征色調、飽和度和亮度,其機理如圖4所示。

圖3 USB前置攝像頭成像

圖4 平面的HSI顏色模型機理
兩種模型之間的轉換公式為

根據人眼識別草地機理,作用于機器人攝像頭,對HSI模型關鍵區間進行選取時,選H[80,160]、S[10,100],上下限可輕微調整,但必須符合圖像采集原則,如圖5所示。
在進行草地圖像特征攝取時,智能機器人需要進行預處理,主要步驟如下
1)草地圖像灰度化處理;
2)草地圖像平滑化處理;
3)草地圖像邊緣檢測;
4)草地圖像紋理特征提取。
在進行圖像特征灰度化處理時,選取圖像特征提取算法SIFT和SUSAN的有效融合[6]:SIFI算法在對極值點進行檢測時,選用高斯圖像金字塔方式,構成差分尺度空間,可較好適應草地圖像復雜特性;SUSAN算法對草地圖像邊角識別、計算及敏感程度更高、更精確。
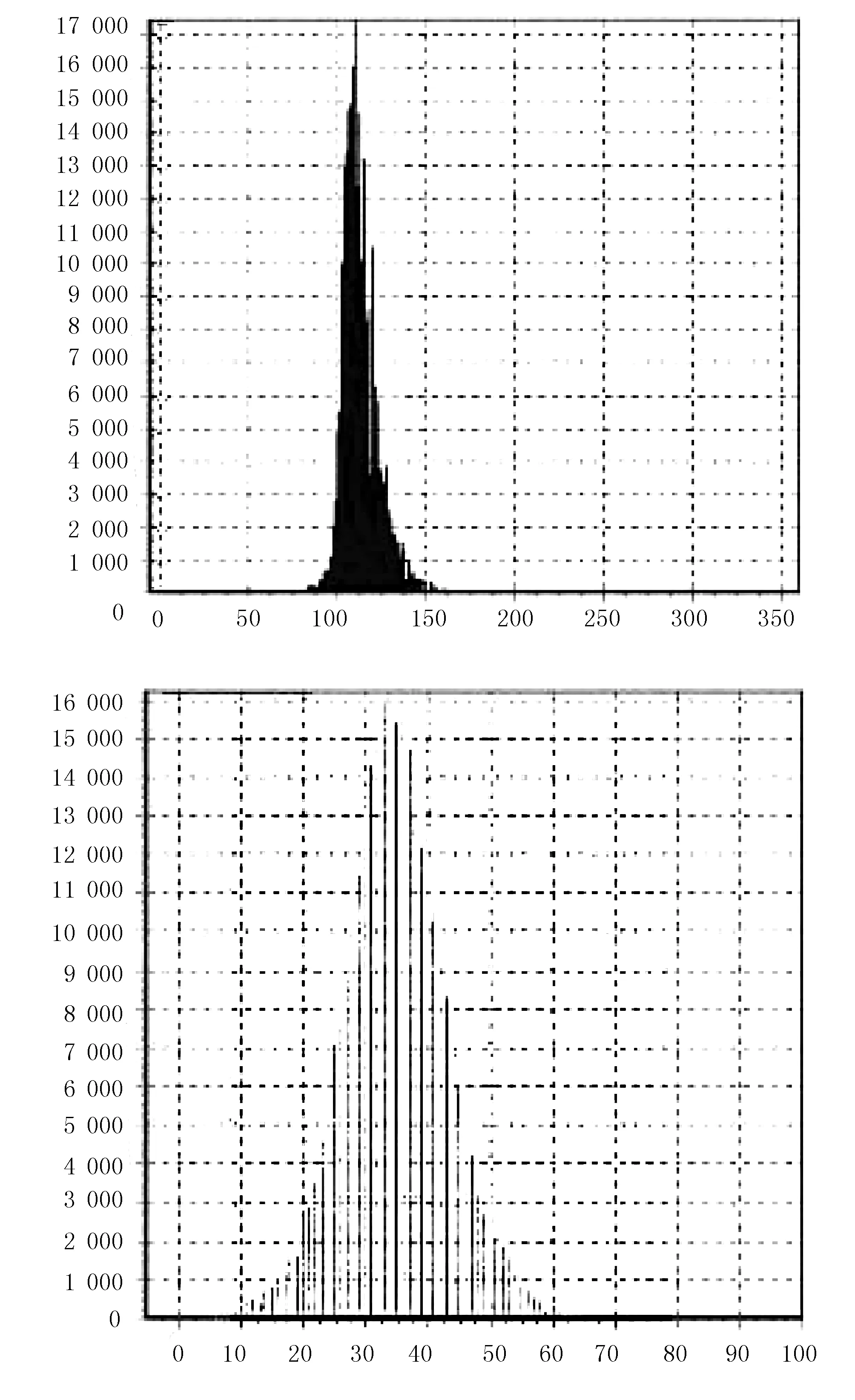
圖5 實驗樣本對應的直方圖(H值、S值)
SIFT模擬圖像的尺度特征,主要是依據空間尺度理論并通過高斯相關函數實現變換,具體公式表述為
L(x,y,δ)=G(x,y,δ)×I(x,y)
其中,(x,y)為坐標點;δ為尺度因子。
為了進一步提高特征提取的穩定性,將DOG算子改進為
D(x,y,δ)=[G(x,y,kδ)-G(x,yδ)]×I(x,y)
=L(x,y,kδ)-L(x,y,δ)
2.2 簡要試驗過程
建立進行草地圖像紋理分割圖提取及工作的簡圖(見圖6),包括處理器、攝像頭及PC終端設施等試驗平臺。同時,遵循利用智能割草機器人進行割草作業時草地與背景分界線的提取算法,其試驗流程圖如圖7所示。

圖6 草地圖像算法簡圖

圖7 基于提取算法的草地與背景分界線流程圖
將草地原彩色圖像轉換為HIS模型之后,要進一步對圖片的灰度值分布進行統計分析,確定偏離角度、偏離距離的最佳值選擇;另一方面,主體與客體、目標與背景(即草地區域與非草地區域的分界線)是圖像紋理特征變化最為集中的關鍵部分,目標通過選取相關特征參數來確定最優的圖像紋理分割二值圖,為最終獲取草地分界線而服務。
根據不同的作業場地,篩選出合適的特征值,并統計換分、計算、對比不同大小的歷遍窗口分割效果,來顯示出所需要的、用于智能機器人辨識的紋理特征;繼而通過對不同灰度級的圖像紋理分割進行大小形狀及其他關鍵特征信息的統計比較,選出最優的符合實際作業場景的草地邊界分割圖;之后對所獲得的圖像進行相關后處理,包括膨脹腐蝕、輪廓雜質剔除等;此時基于圖像紋理分割圖的提取算法最符合實際,為劃分出最優的草地分界線做準備,實現智能割草機器人路徑優化與精準度。
進行提取草地分界線,此環節主要將人眼對于事物的成像及邊緣化、差異化的判斷機理運用于智能割草機器人。邊緣檢測算法[7]流程主要是通過對原始圖像進行濾波處理之后進入平滑處理,并增強梯度或含零點圖像,從而檢測出邊界點。濾波處理[8]環節運用算法及主要代碼如下:
e2=entropyfilt (i2);
e2im=mat2gray (e2);
figure; subplot (121)
imshow (e2im);
bw2=im2bw (e2im, graythresh (e2im));
subplot (122); imshow (bw2)
mask2= bwareaopen (bw2, 1000);
figure; imshow (mask 2);
texture1=i ;
texture1 (~mask2)=0;
texture2=i ;
texture2(mask2)=0;
figure; subpot(121)
imshow (texture1);
subplot (122)
imshow (texture2);
boundary=bwperim (mask2);
segmentresults(boundary)=255;
figure; imshow(segmentresults);
邊緣檢測算法理論模型建立如下,即
卷積得

在生成的最優紋理特征圖基礎之上,提出一種基于紋理分割圖的草地分界線提取,并最大限度實現擬合的算法:智能割草機器人前端攝像頭依據圖像紋理特征上黑色像素點的密集程度和分布情況對已割草地和未割區域進行初步識別,筆者通過計算機語言Open CV[9]將特征二值圖的整體進行等寬度均勻分割。該編程語言編寫靈活,計算速度較快,并加入輪廓歷遍器統計相關算法,找出包含黑色像素點最多的輪廓歷遍器IMAX,如圖8所示。
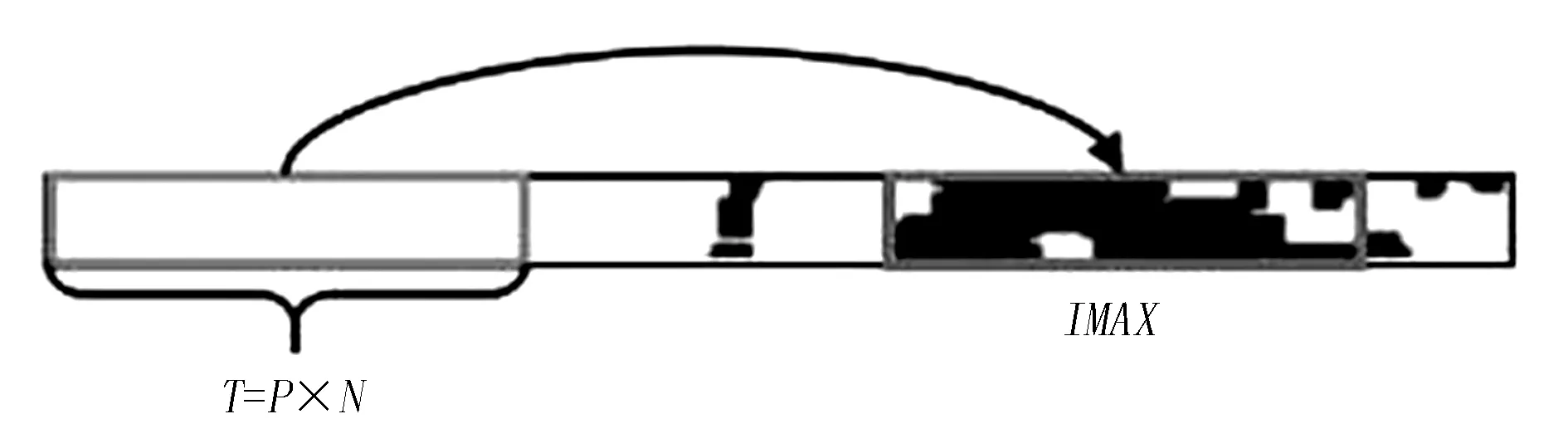
圖8 IMAX輪廓分割示意圖
相當于一種微分思想,對于分割寬度L的確定必須結合最終的分界線擬合因素綜合而定;采取輪廓歷遍器長度結合具體紋理復雜程度、黑色像素點集中分散程度呈變動的方法進行輪廓歷遍,才可達到最佳分割和擬合效果,最終實現提取草地分界線的目標,如圖9所示。

圖9 提取的像素點擬合效果
3 分析與評價
通過將所得到的虛擬分界節點連線并與實際試驗圖像映射[10],得出明顯草地紋理特征差別較大的草地分界線。實驗原理及相關實際模擬有效,使得智能割草機器人在識別障礙、躲避障礙和自動回歸充電功能的同時,將草地分界線功能優化和完善,這對傳感器控制及智能機器人的相關硬件設備部件的功能性提出較高要求。此次改進之處在于:模擬人的視覺識別圖像機理,對智能割草機器人的攝像頭從攝取圖像、處理圖像、分析圖像各個環節進行各步驟最優化提取分割算法,達到最優化采集草地圖像信息及融合PC機的集中控制處理功能;提出一種基于圖像紋理分割圖的草地分界線提取算法,很好地進行分割點坐標擬合,擬合效果如圖9所示;通過精確擬合出草地區域與非草地區域兩者的分界線,提高了智能機器人識別分界線的水平,并可用于后序完善、優化智能機器人作業路徑。
4 結論
從數字圖像處理應用及分析轉換技術、智能機器人前端攝像頭功能優化等方面入手,對草地的圖像采集流程進行優化,并進行草地顏色空間和模型的轉換,從而提高對智能割草機器人的圖像紋理提取分割的實用性。同時,結合各類草地場景的分析算法[11-12],提出一種基于圖像紋理分割的草地分界線提取算法,不可避免會有一定的缺陷,但對于提高智能移動割草機器人的圖像提取、路徑規劃[13]及高效作業具有促進作用,可為相關學者對智能機器人的控制進行更深入研究提供一定參考。
參考文獻:
[1] 丁毅,邱白晶,周寧,等.割草機器人GPS/DR組合導航系統的研究[J].農機化研究,2006(4):68-71.
[2] 賀濤,肖勇.割草機器人工作原理及試驗研究—基于GPS/DR組合導航系統[J]. 農機化研究,2017,39(8):191-194.
[3] 周寧邱,白晶,丁毅,等. 割草機器人避障行為的研究—基于傳感器測距及模糊控制技術[J].農機化研究,2006(3):169-174.
[4] 袁路路, 張娓娓. 智能軌跡控制割草機器人設計—基于FPGA神經網絡[J].農機化研究,2017,39(4):212-216.
[5] 章毓晉. 圖像分割[M].北京:科學出版社, 2001.
[6] 童逸舟.基于圖像處理的智能割草機器人路徑規劃研究[D].杭州:浙江理工大學,2016.
[7] 韓琳,楊明.基于小波變換的紋理特征提取分析[J].電腦知識與技術,2007(11):1395-1422.
[8] 刑明.基于數字圖像處理的草坪場景分析算法研究[D].杭州:浙江理工大學,2016.
[9] 劉立強,蔡曉華,吳澤全. 基于Open CV的除草機器人圖像處理技術[J]. 農機化研究,2013,35(12):162-165.
[10] 鄭鑫.具有路徑規劃功能的智能割草機研制[D].南京:東南大學,2014.
[11] 陳天華. 數字圖像處理[M].北京:清華大學出社,2007.
[12] 李謙, 蔡曉華. 機器視覺在除草機器人中的應用[J].農機化研究,2014,36(7):204-206,231.
[13] 毛可駿,周平.基于機器視覺的自主插秧機導航信息的提取研究[J].農機化研究,2009,31(5):63-66.
猜你喜歡
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
故事大王(2016年7期)2016-09-22 17:30:08
河南科技(2014年23期)2014-02-27 14:19:15