海流邊界下初始鋪管作業(yè)建模及半物理仿真
2018-06-01 02:53:04許秀軍王立權張同喜
吉林大學學報(工學版) 2018年3期
許秀軍,李 震,王立權,張同喜
(哈爾濱工程大學 機電工程學院,哈爾濱 150001)
0 引 言
海底管道鋪設[1-3],是深海油氣資源開發(fā)的重要手段,其中初始鋪管[4]是在初始纜牽引下將管道下放至海床預設區(qū)域的過程。“海洋石油201”起重船[5]是我國第一艘具有3000 m深水鋪設能力的鋪管船,是我國未來自主開發(fā)深海能源的重要裝備。
對于海底管道鋪設的理論研究,大部分研究機構都集中在對S型鋪管和立管的正常鋪設[6,7]過程進行形態(tài)和受力分析,對海流載荷、動力定位等多因素影響的下初始鋪管纜索和管道系統(tǒng)的研究較少。Hval等[8]對海底立管進行分析,對建立的管道微分方程的解算方法做出了深入研究。Westgate等[9]對管道力學模型采用差分法進行求解。García-Palacios等[10]對傳統(tǒng)自然懸鏈線基算法進行了簡化和修正。許元革[11]針對不同的情況和邊界條件,對S型鋪管的管線形態(tài)進行了分段處理,采用不用算法求解管線的上彎段、中間段和下彎段。虛擬現(xiàn)實技術在美國和西方國家已經(jīng)有廣泛的應用[12,13]。國內(nèi)對于海底管道鋪設虛擬現(xiàn)實技術的研究只有哈爾濱工程大學和西北工業(yè)大學等少數(shù)機構[14,15]。挪威和加拿大對于鋪管視景仿真技術的研究已經(jīng)應用于實際的工程項目中[16]。
本文根據(jù)深水鋪管船實際作業(yè)數(shù)據(jù)和工藝流程,建立了不同的仿真算例,然后將仿真結(jié)果與商業(yè)軟件OFFPIPE[17]提供的結(jié)果進行對比,結(jié)果表明仿真系統(tǒng)誤差保持在5%以內(nèi)。
1 鋪管作業(yè)仿真系統(tǒng)
1.1 初始鋪管介紹
圖1為初始鋪管過程示意圖。圖1中,hl為張緊器中心與海平面的垂直距離;點P為管線上彎段的起始點;點P2為管線分離點;Rs為托管架曲率半徑;c為點P與點P2間的水平距離;θc為管線脫離角,是管線在P2點處的切線與水平方向的夾角;L為初始纜長度;T為纜索張力;θb為初始纜與X0坐標軸的夾角。初始纜一端通過初始錨固定在預定海床上,另一端通過初始封頭與海底管道連接。管道在甲板工位進行焊接、密封等工序后連接成連續(xù)的海底管道,通過張緊器控制管道的張力和下放速度。鋪管船依靠動力定位系統(tǒng)(DP)與張緊器配合不斷前進,逐漸將管道在初始纜的牽引下,放置到海底,完成初始鋪管的作業(yè),進入正常鋪管過程。
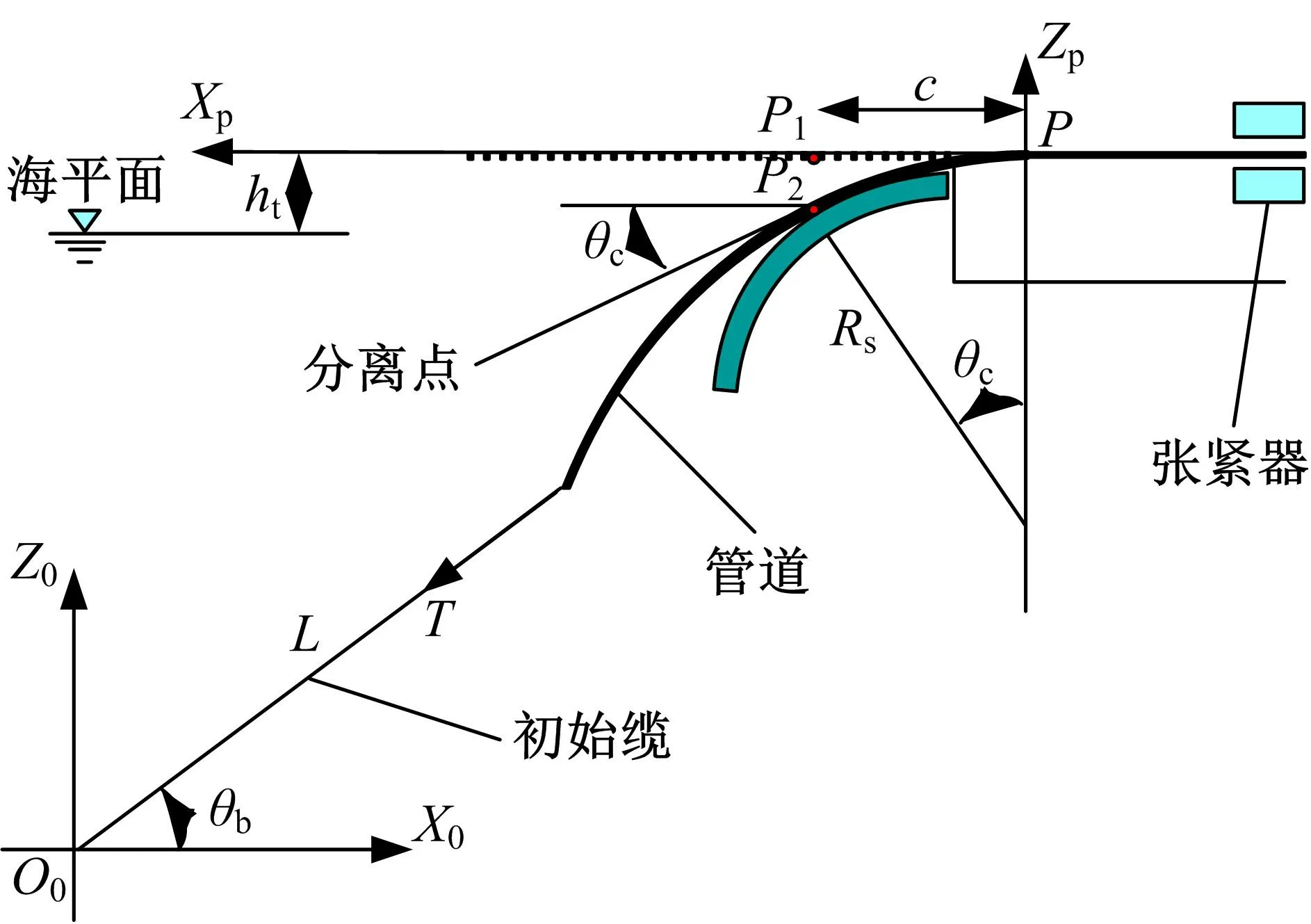
圖1 初始鋪管過程Fig.1 Process of initial pipe laying
1.2 總體功能分析
鋪管仿真系統(tǒng)是一個半物理仿真系統(tǒng)[18],擁有實際的操作臺體和虛擬的三維立體場景。操作人員通過操作臺上各功能按鍵來控制三維立體場景內(nèi)的鋪管船,從而實現(xiàn)鋪管作業(yè)的各項操作,給人一種身臨其境的感覺。仿真系統(tǒng)功能框架如圖2所示。
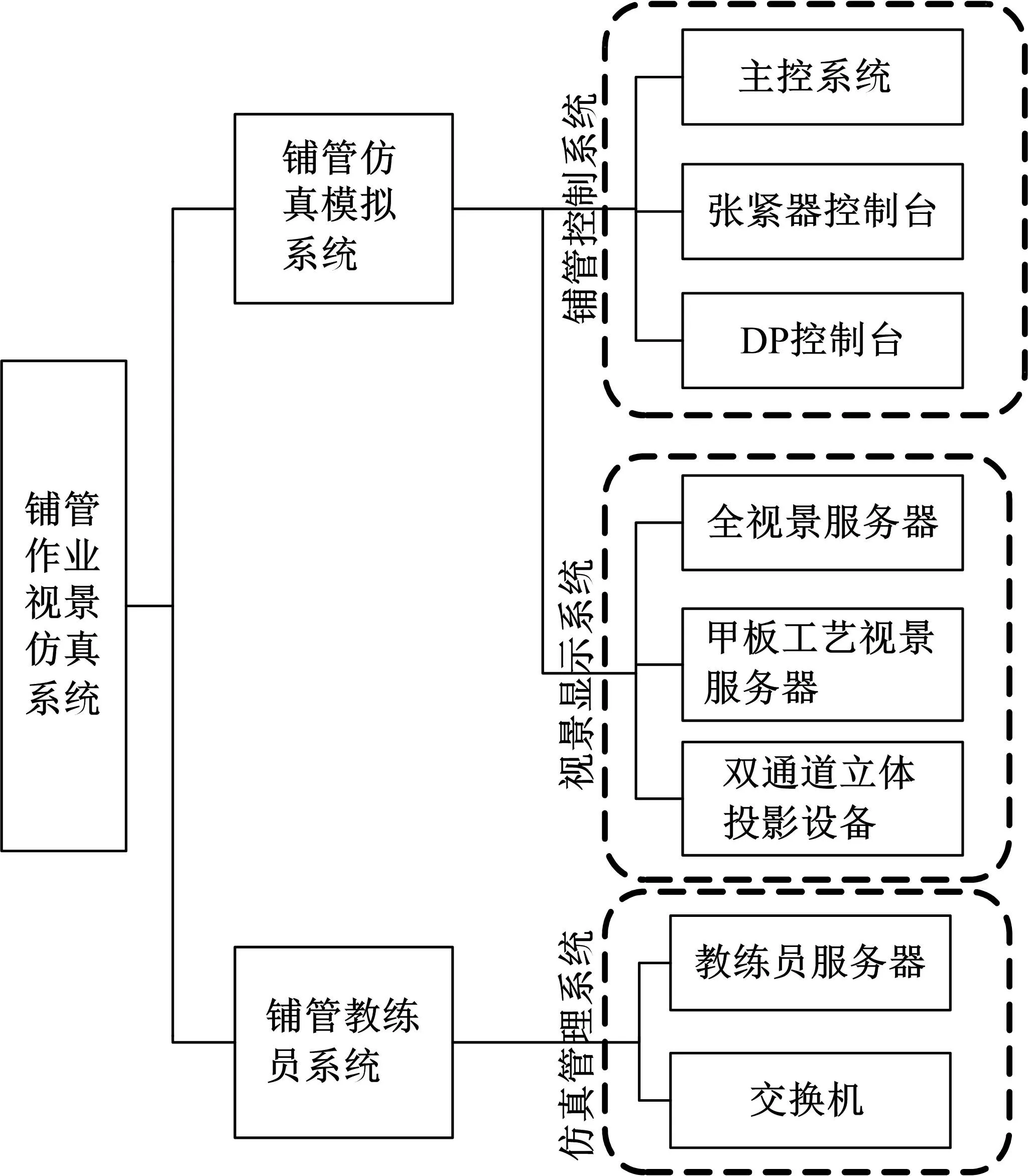
圖2 鋪管作業(yè)仿真系統(tǒng)總體功能Fig.2 Function of pipe laying simulation system
鋪管仿真模擬系統(tǒng),擁有鋪管過程控制、數(shù)據(jù)計算和監(jiān)測以及虛擬場景再現(xiàn)等功能。鋪管仿真模擬系統(tǒng)包含鋪管控制系統(tǒng)和視景顯示系統(tǒng)兩大模塊。視景顯示系統(tǒng)主要是對初始鋪管過程中三維動態(tài)視景畫面進行處理和顯示,包含水下部分和水上部分關鍵部位的視景監(jiān)測,還有甲板管道焊接、密封等過程的視景。
教練員系統(tǒng)是仿真系統(tǒng)的管理員,可以監(jiān)測所有的數(shù)據(jù)和視景畫面,制定仿真訓練科目,具有系統(tǒng)最高權限。
1.3 仿真系統(tǒng)總體方案
1.3.1 硬件系統(tǒng)
鋪管仿真系統(tǒng)硬件由張緊器控制臺、主控系統(tǒng)服務器、視景服務器(主視景、甲板視景、監(jiān)控視景)、網(wǎng)絡交換機、DP控制臺、教練員控制臺、立體投影設備7部分組成。鋪管仿真模擬系統(tǒng)共包含12臺顯示器,分別對應主控系統(tǒng)軟件操作界面、8臺監(jiān)控工位視景顯示、1臺甲板工位視景顯示、教練員操作界面、教練員輔助操作界面。DP控制臺和張緊器控制臺各自獨立包含自己的軟件系統(tǒng)和控制界面。系統(tǒng)硬件布局如圖3所示。
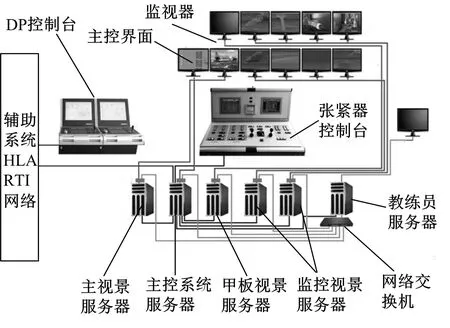
圖3 鋪管仿真系統(tǒng)硬件Fig.3 Hardware of simulation system
1.3.2 軟件系統(tǒng)
仿真軟件系統(tǒng)主要包含4部分:鋪管控制模塊、張緊器軟件模塊、視景系統(tǒng)、DP軟件模塊。DP操作臺軟件用來控制鋪管船的定位和移船操作,船舶姿態(tài)的監(jiān)測和控制。張緊器操軟件模塊主要是實現(xiàn)數(shù)據(jù)的采集、數(shù)據(jù)的信號轉(zhuǎn)換、網(wǎng)絡通信、絞車控制以及張緊器的軟件操作。鋪管仿真系統(tǒng)軟件如圖4所示。
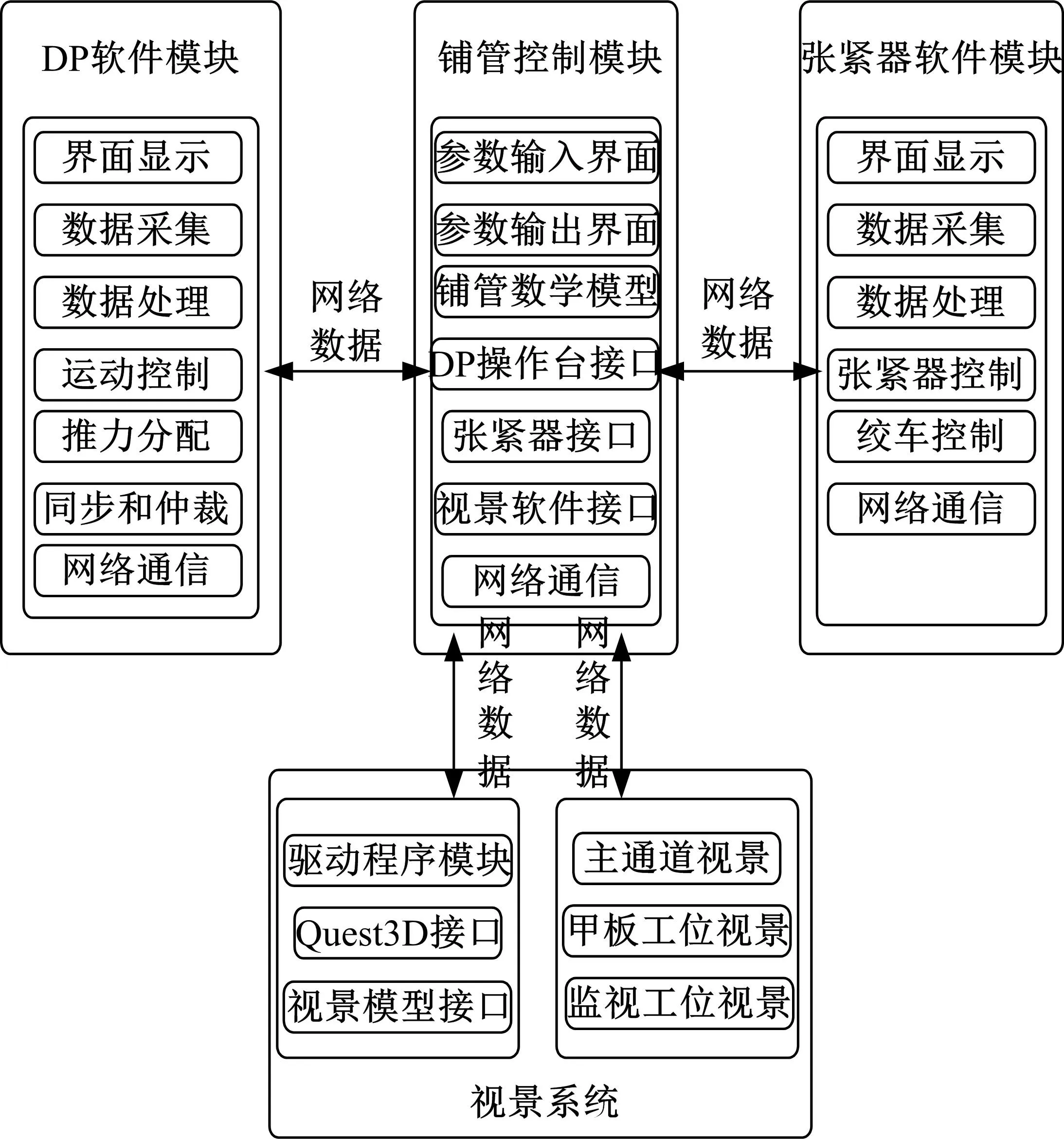
圖4 仿真系統(tǒng)軟件劃分Fig.4 Software of simulation system
鋪管控制模塊提供仿真系統(tǒng)的軟件操作界面,該界面可以進行參數(shù)輸入、輸出以及數(shù)據(jù)監(jiān)測,數(shù)學模型的解算在該部分實現(xiàn),而且鋪管集成控制系統(tǒng)提供與其他子系統(tǒng)的軟件接口,包括與DP操作臺的軟件接口、與張緊器操作臺的軟件接口、與視景系統(tǒng)的軟件接口。
視景系統(tǒng)主要包括驅(qū)動模塊和視景模塊,視景模塊采用3D MAX進行建立和渲染,驅(qū)動模塊是基于QUEST-3D平臺開發(fā)。視景系統(tǒng)包括:鋪管船視景、外部海洋大氣環(huán)境視景、托管架監(jiān)控視景、張緊器視景、水下海洋環(huán)境視景、管道形態(tài)視景等內(nèi)容。部分視景效果如圖5所示。
2 初始鋪管數(shù)學模型
初始鋪管作業(yè)系統(tǒng)建模主要分為鋪管系統(tǒng)建模和船舶運動系統(tǒng)建模。
2.1 船舶運動數(shù)學模型
圖6為船體坐標系示意圖,選空間固定不動的一點為世界坐標系原點,OXYZ為隨船平動坐標系。
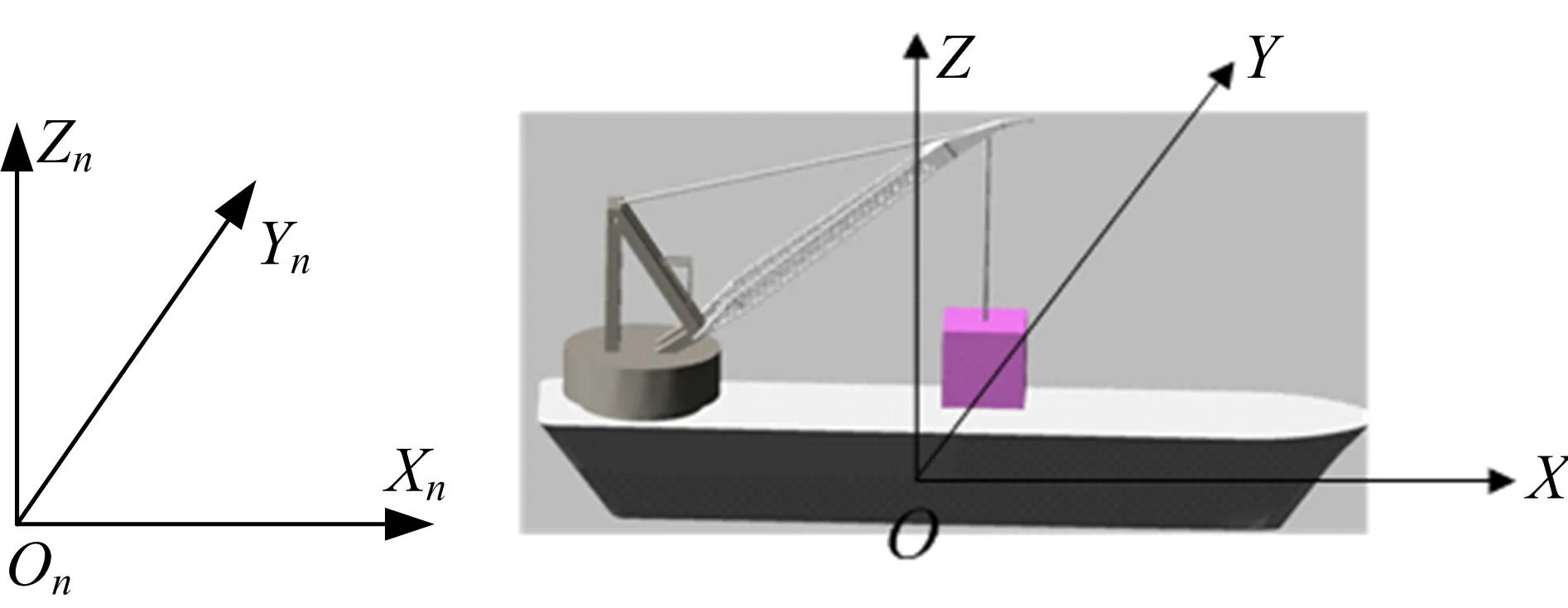
圖6 船體坐標系示意圖Fig.6 Schematic of ship coordinate system
起重船剛體動力學模型如下:
(1)
式中:MRB為剛體質(zhì)量矩陣[19];v為廣義速度和廣義角速度,v=[u,κ,w,p,q,r]T;τRB為在坐標系{b}下的廣義力和廣義力矩,τRB=[X,Y,Z,K,M,N];CRB為剛體科里奧利項和向心力矩陣。
船舶在航行過程中,不僅要考慮自身動力學,還要考慮船舶運動過程中的水動力問題[20],水動力問題可以分為附加質(zhì)量和水阻尼力兩類。在考慮水動力情況下,起重船剛體動力學模型最終表示為:
τwind+τwave+τcurrent+τcontrol
(2)

MRB=
(3)
式中:Iij(i=j)為船體繞Obx、Oby和Obz三個坐標軸的慣性矩;Iij(i≠j)為在Obxy、Obyz和Obzx三個平面內(nèi)的慣性積;XG、YG和ZG為船體重心在慣性坐標系下的位置坐標。
為了便于編程計算,將CRB(v)進行變換,首先將MRB表示為:
(4)
由此:
(5)
式中:v1為線速度矢量,v1=[u,κ,w]T;v2為角速度矢量,v2=[p,q,r]T。
2.2 海流載荷數(shù)學模型
在海底管道鋪設計算中,一般將海流看作常值海流,海流的流向在一段時間內(nèi)保持不變[21]。在無實測海流速度數(shù)據(jù)情況下,用經(jīng)驗公式來計算海面以下某處的海流速度[22]:
(6)
式中:vm為海面的風流流度,m/s;vt為海面的潮流流度,m/s;H為水深,m;h為計算海流處離海底的深度,m。
以南海海域的海流數(shù)據(jù)為依托,將作用于管線上的海流力簡化成從上而下逐漸減小的穩(wěn)定梯度力[23],這種海流梯度力是由海水流動引起的對管線的一種拖拽力:
(7)
式中:Fc為管道單位長度上的海流載荷,N;vmax為海流的最大速度,m/s;ρ海水的密度,kg/m3;D為管道的外徑,m;CD為管道拖拽力系數(shù)。
2.3 管道數(shù)學模型
2.3.1 管道受力分析
綜上所述,我們勢必要用積極的態(tài)度對待淺閱讀,把淺閱讀當做一種必要的閱讀方式,它和深閱讀一起,構成了閱讀的必備過程。淺閱讀是邁向深閱讀的一個步驟,同時,它也可以獨立存在。在引導大眾閱讀時,要從閱讀的主體、內(nèi)容、目的等其他方面去分析,而不是以是否深淺閱讀來判斷其閱讀的價值。
對管道取一微段進行分析,在自然坐標系(θ,s)下建立管道微段的平衡微分方程[24]。管道微段受力如圖7所示。圖中,F(xiàn)為管道剪力分量;T為管線張力;f(s)為海流引起的外部載荷;θ為管道單元傾角;C為海流方向;w為管道浮重度,即單位管道長度在海水中的質(zhì)量。
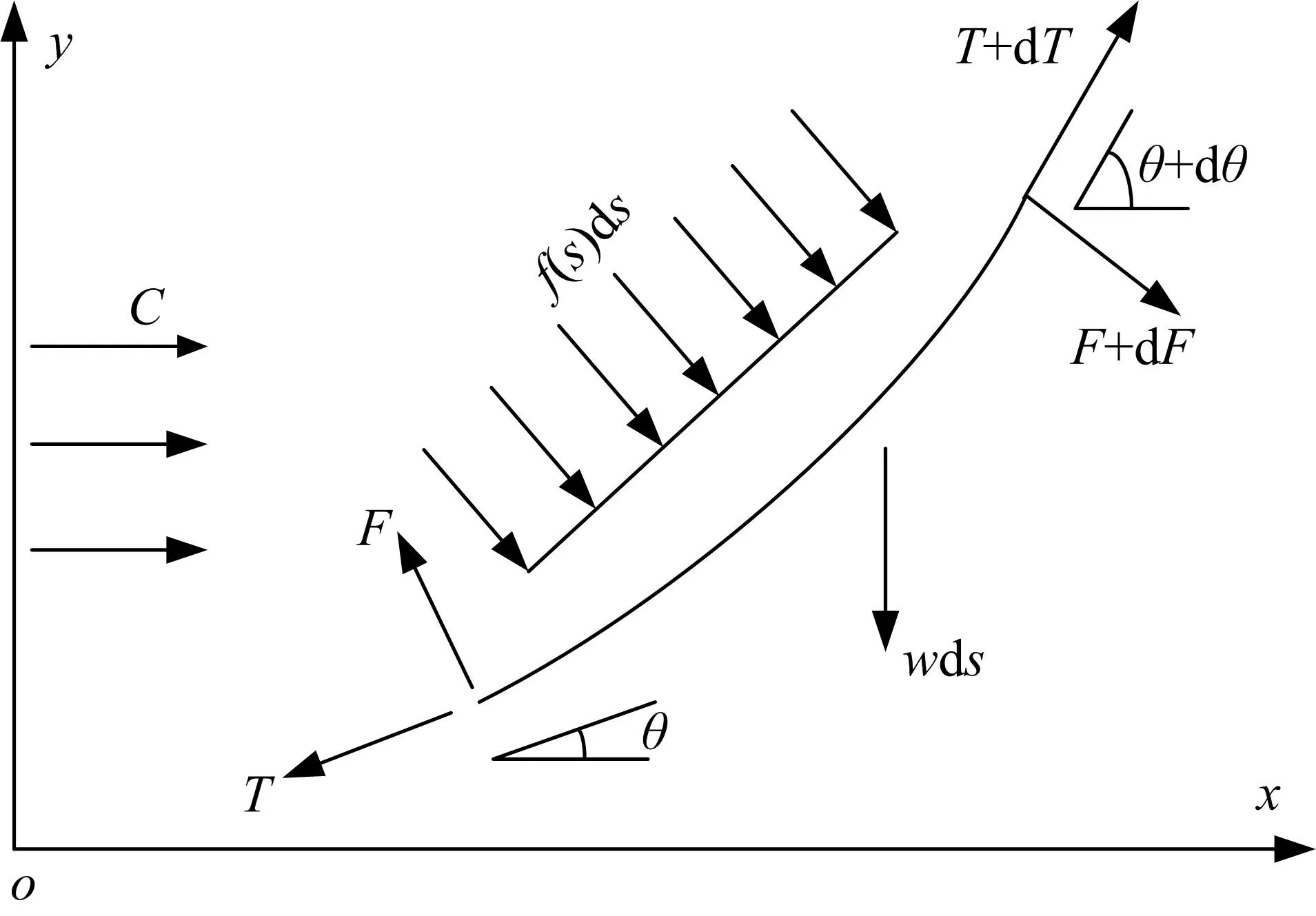
圖7 管道微段受力圖Fig.7 Force analysis of micro pipeline segment
根據(jù)圖7可知,海流引起的拖拽力為:
(8)
沿單元軸向的法線對力進行分解得到:
dF-Tdθ+wcosθds+f(s)ds=0
(9)
在經(jīng)典梁理論中有:
(10)
將式(10)代入管道微段受力平衡方程,可得:
(11)
式中:EI為管道彎曲剛度。
2.3.2 初始纜受力分析
對于初始纜同樣采用微段進行受力分析(見圖8)。設微段長度為ds,兩端受到的拉力分別為Tc和Tc+dTc,在起始纜自重和海水浮力的情況下,管道受到的軸向張力變大,且產(chǎn)生一定的轉(zhuǎn)角dφ。
忽略海流載荷對起始纜的影響,根據(jù)纜索單元軸向受力平衡,可以得到:
(Tc+dTc)=wcdssinφ+Tc
(12)
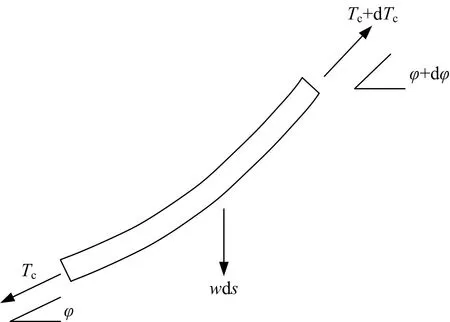
圖8 初始纜微段受力圖Fig.8 Force analysis of micro cable segment
式中:wc為起始纜的浮重度(單位長度纜索在水中的質(zhì)量);φ為纜索單元傾角。
纜索的浮重度wc可以根據(jù)以下公式計算得到:
(13)
式中:Dc為纜索直徑,m;ρc為纜索鋼材密度,kg/m3;ρw為海水密度,kg/m3。
3 仿真實例及其結(jié)果分析
3.1 仿真案例介紹
為進一步分析初始鋪管作業(yè)過程中管線和纜索的響應狀態(tài),驗證動力學模型的正確性,參照實際的初始鋪管作業(yè)施工過程,制定初始鋪管仿真案例,采用數(shù)值解法,對數(shù)模模型進行求解。圖9為初始鋪管視景仿真過程中的數(shù)據(jù)流框圖。
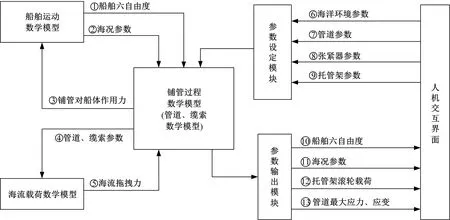
圖9 鋪管作業(yè)視景仿真數(shù)據(jù)流圖Fig.9 Data flow diagram of pipe laying visual simulation
仿真過程中,系統(tǒng)不停地讀取船體運動參數(shù)和海況參數(shù),并在計算模塊中實時地計算出管道和纜索的形態(tài)、受力以及對異常情況的判斷,計算結(jié)果再實時反饋給船舶運動系統(tǒng)。為了降低數(shù)學模型在實時計算過程中的累積誤差,本仿真系統(tǒng)采用了計算方法簡潔、計算量少、收斂速度快的布擬牛頓法。
3.2 初始鋪管算法準確性驗證
為驗證仿真系統(tǒng)準確性,利用仿真系統(tǒng)對管道靜態(tài)鋪設進行模擬,得到不同水深條件下管道和初始纜的形態(tài)。仿真案例中海況參數(shù)和海管參數(shù)分別如表1和表2所示。
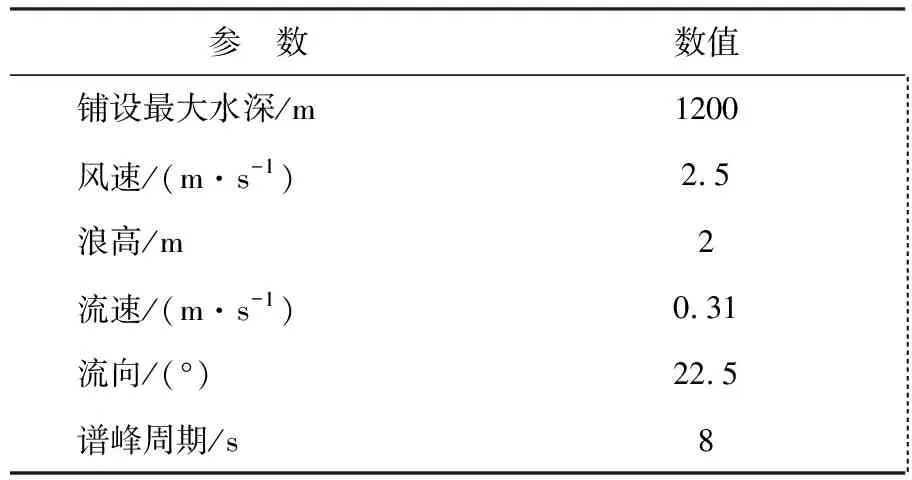
表1 鋪管仿真案例海況參數(shù)Table 1 Sea state parameters
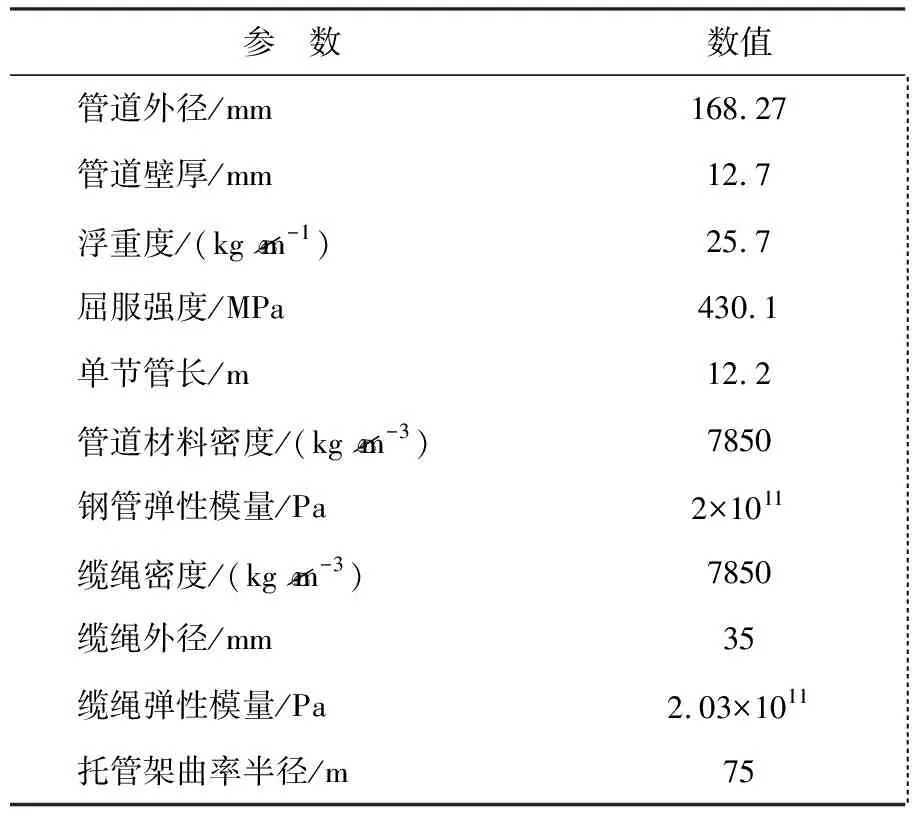
表2 海管和纜繩參數(shù)Table 2 Pipe and cable parameters
圖10為管線下放到不同水深情況下管線和纜索的形態(tài),將仿真案例采集到的數(shù)據(jù)和商業(yè)軟件OFFPIPE(由海洋石油工程股份有限公司提供)得到的理論數(shù)據(jù)放在一起進行對比。OFFPIPE是海上石油工業(yè)最權威的鋪管分析軟件,其計算結(jié)果通過大量鋪管實際數(shù)據(jù)驗證,在國際上具有很高的一致認同性[18]。其對比結(jié)果如圖10(a)~10(d)所示,實線是本仿真系統(tǒng)采集的數(shù)據(jù),虛線是OFFPIPE專業(yè)軟件提供的數(shù)據(jù)。
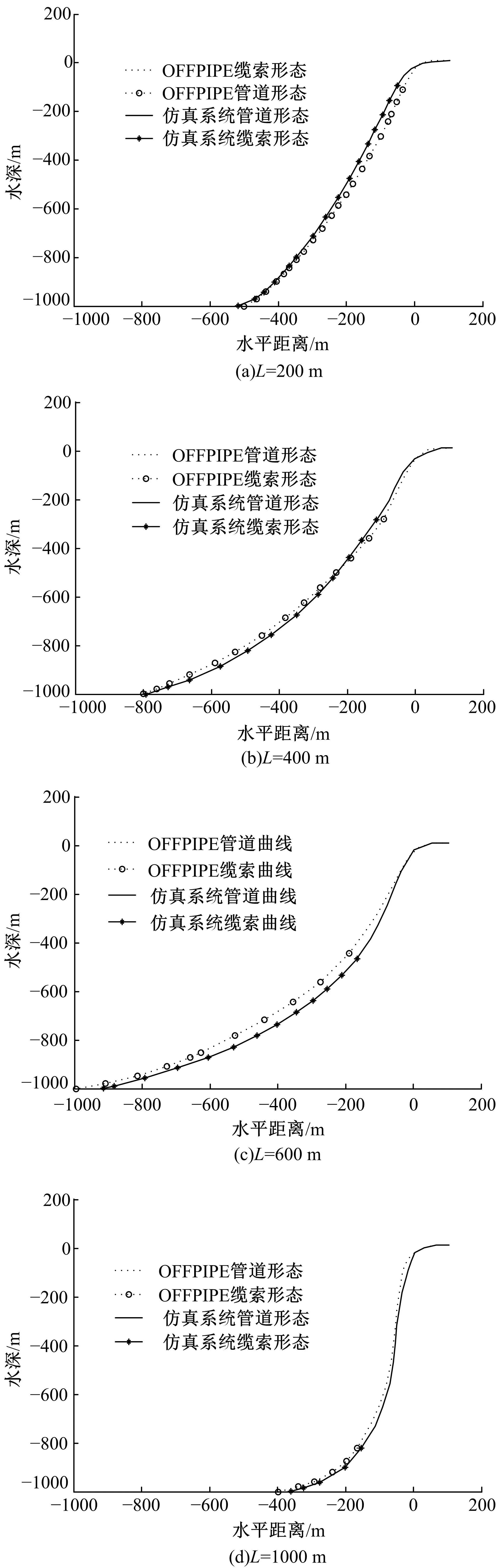
圖10 初始鋪管不同水深下管道和纜索形態(tài)曲線Fig.10 Pipe and cable shapes of initial pipe laying under different water depth
將仿真系統(tǒng)的結(jié)果與OFFPIPE結(jié)果進行對比驗證,可以看出管道和纜索的形態(tài)吻合較好,誤差基本保持在5%以內(nèi)。從圖10還可以看出:隨著初始鋪管作業(yè)的進行,管道長度逐漸增加,管道與初始纜連接點逐漸降低,纜索觸底點的位置先遠離鋪管船后再靠近鋪管船,直至海管完全放置到海床,進入正常鋪管過程。
3.3 海流邊界下初始鋪管動態(tài)分析
在管道初始鋪設過程中,為便于分析海流對管道形態(tài)及受力的影響,取鋪設長度L分別為200 m、1200 m兩種狀態(tài),設置海流方向為0°,流速分別為0.0、1.0、2.0 m/s,管道和纜索的形態(tài)和受力如圖11~圖13所示。
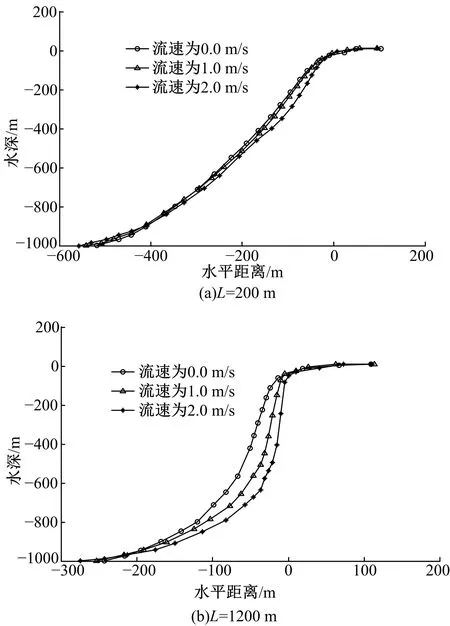
圖11 不同海流速度下的管道和纜索形態(tài)Fig.11 Pipe and cable shapes under different current velocity
海底管道順著海流的方向進行鋪設,海流方向平行于船行方向。從圖11中海流作用下的管道和纜索形態(tài)隨海流變化的響應曲線看出:當流速從0 m/s增大到2 m/s的過程中,管線和纜繩受到海流的影響,整體形態(tài)上部因大梯度海流力的作用朝船尾方向移動,管道和纜索整體形態(tài)下部遠離船尾,觸底點水平向遠離船尾方向移動,整體形態(tài)趨于平緩。纜索形態(tài)受到海流影響較管線小得多。
圖12為不同流速下,管道鋪設長度分別為200 m和1200 m時管道和纜繩的軸向力。
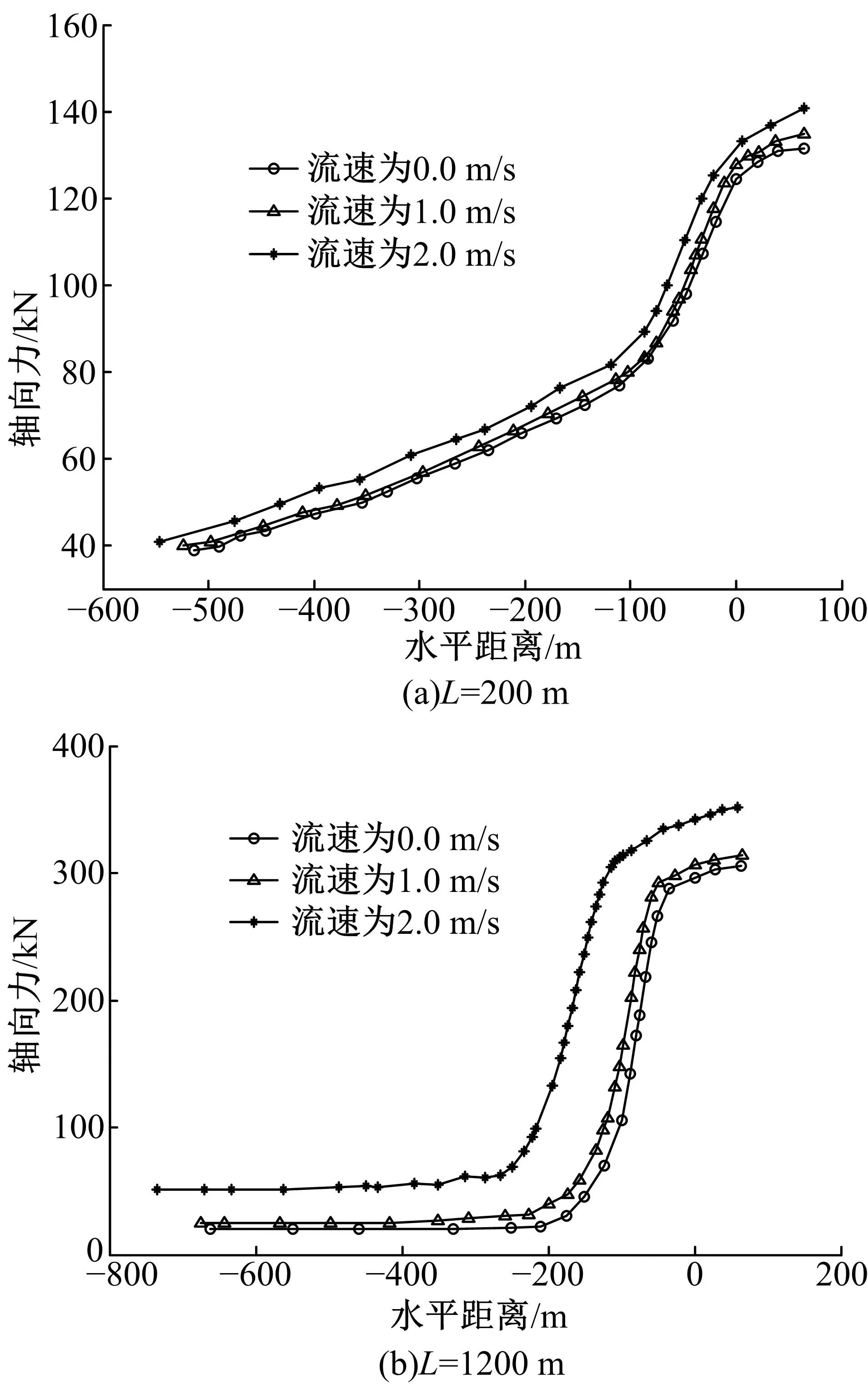
圖12 不同海流速度下的管道和纜索軸向力Fig.12 Axial forces of pipe and cable under different current velocity
從圖12可以看出,海流速度的改變對纜索軸向力影響小,對管道的軸向力影響大。在海管觸底后,隨著海流速度的增大,會引起管道軸力明顯增大,當海流速度從0 m/s增加到2 m/s時,張緊器張力從305 kN增加到365 kN。這是因為海管的外徑遠比纜繩的外徑大的多,會承受更大的海流拖拽力。
圖13為不同流速下,管道鋪設長度分別為200 m和1200 m時管道承受的彎矩。
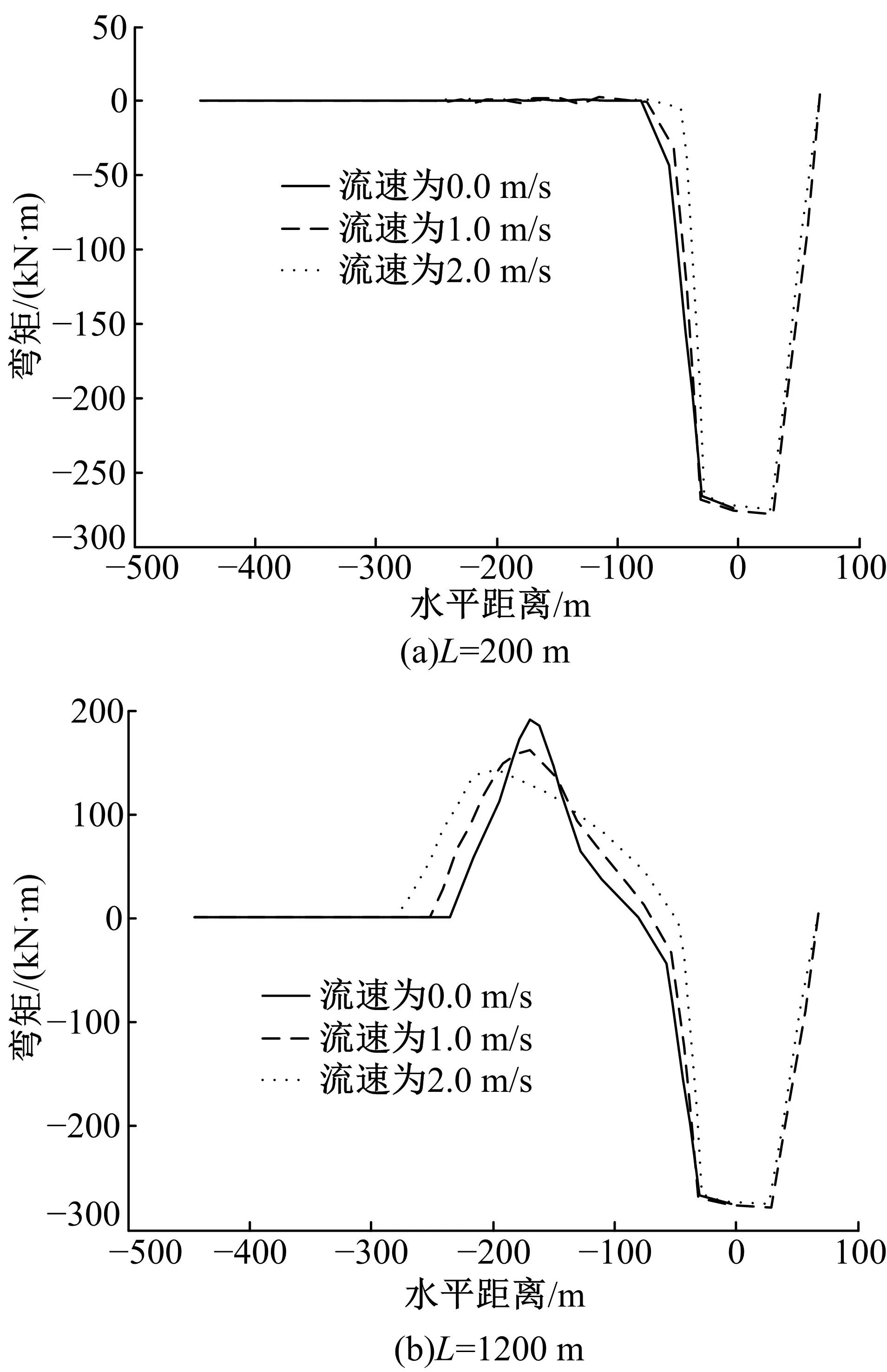
圖13 不同海流速度下的管道彎矩分布Fig.13 Pipe bending moment under different current velocity
從圖13中可以看出,在管道反彎點之前管道的彎矩無明顯變化,當初始鋪管反彎點出現(xiàn)后,下彎段的彎矩逐漸增大。管線下放至200 m時,海流的流速改變對于管道彎矩的影響不大,當海管觸底后,管道所受彎矩隨著海流的增大而變小,原因從圖10可以得知,順向的海流會使管線的形態(tài)趨于平緩,曲率減小,有利于鋪管作業(yè)。
4 結(jié) 論
以“海洋石油201”S型鋪管船為研究對象,綜合利用視景技術、動力學建模技術、網(wǎng)絡通信技術以及半物理仿真技術,建立了一個海底管道鋪設模擬的半物理仿真系統(tǒng)。
(1)海流的流速增大會造成初始鋪管過程中管道和纜索形態(tài)發(fā)生順向偏移,并且隨著管道下放的深度增加,形態(tài)偏移越大。
(2)在管道初始鋪設過程中,在海流載荷的作用下,管道的整體張力明顯變大,管道觸底時當海流速度從0 m/s增加到2 m/s時,張緊器張力從305 kN增加到365 kN,在鋪管作業(yè)中,海流對管道張力的影響必須要考慮到,仿真案例的數(shù)據(jù)可以作為實際施工作業(yè)工藝制定的參考依據(jù)。
(3)順向海流會減小管道的彎矩,在實際鋪管施工作業(yè)過程中,要考慮海流載荷制定管道鋪設的施工方案,如果海流方向發(fā)生改變,需要對施工方案進行調(diào)整。
通過與商業(yè)軟件OFFPIPE提供結(jié)果對比,仿真系統(tǒng)得到的曲線與OFFPIPE曲線基本一致,誤差保持在5%以內(nèi),證明了本文作業(yè)理論分析算法的準確性。初始鋪管半物理仿真系統(tǒng)能夠?qū)崟r地獲得初始鋪管過程中管道和纜索的動態(tài)特性,可為初始鋪管海上實際施工作業(yè)進行工程預演,提前發(fā)現(xiàn)問題,調(diào)整施工方案。
參考文獻:
[1] Jin Z, Cai L. Exploration propects, problems and strategies of marine oil and gas in China[J]. Oil & Gas Geology,2006,27(6):722-730.
[2] Peng X,Yan Z,Yue Q,et al. Dynamic loading history and collapse analysis of the pipe during deepwater S-lay operation[J]. Marine Structures,2015,40(11):183-192.
[3] Zhang J,Dung M,Xian H U. Bending curvature model and calculation of residual stress of submarine pipe during reel-lay[J]. Ocean Engineering,2015,35(5):156-165.
[4] Vitovsky O V,Nakoryakov V E,Slesareva E Y. Heat transfer of helium-xenon mixture on the initial pipe section[J]. Journal of Engineering Thermophysics,2015,24(4):338-341.
[5] 許文兵. 深水鋪管起重船“海洋石油201”研制[J]. 中國造船,2014,55(1):208-215.
Xu Wen-bing. Development of deepwater pipelay crane vessel “offshore oil 201”[J]. Ship Building of China,2014,55(1):208-215.
[6] Zhang Z L,Wang L Q,Ci H Y. An apparatus design and testing of a flexible pipe-laying in submarine context[J]. Ocean Engineering,2015,106(7):386-395.
[7] Han F,Wang D G,Cao J,et al. Research on design of the J-lay tower for deepwater pipe laying[J]. Ocean Engineering,2012,30(1):126-130.
[8] Hval M,Lamvik T. Parameters affecting the weld defect acceptance criteria of clad submarine pipelines installed by S-lay or reel-lay[J]. Engineering Failure Analysis,2015,58:394-406.
[9] Westgate Z J,White D J,Randolph M F. Modelling the embedment process during offshore pipe-laying on fine-grained soils[J]. Canadian Geotechnical Journal,2013,50(1):15-27.
[10] Garcia-Palacios J, Samartin A, Negro V. A nonlinear analysis of laying a floating pipeline on the seabed[J]. Engineering Structures,2009,31(5):1120-1131.
[11] 許元革. 深水鋪管起重船作業(yè)實時動力學仿真研究[D]. 哈爾濱: 哈爾濱工程大學機電工程學院,2012.
Xu Yuan-ge. Real-time dynamic simulation research on the deepwater pipelay crane vessel operation[D]. Harbin: College of Mechanic and Electrical Engineering,Harbin Engineering University,2012.
[12] Dobson H D, Pearl R K, Orsay C P,et al. Virtual reality[J]. Diseases of the Colon & Rectum,2003,46(3):349-352.
[13] Bowman D A, Mcmahan R P. Virtual reality: how much immersion is enough[J]. Computer,2007,40(7):36-43.
[14] 田慶元. 起重鋪管船作業(yè)視景仿真及軟件開發(fā)集成技術研究[D]. 哈爾濱:哈爾濱工程大學機電工程學院,2011.
Tian Qing-yuan. Research on pipelaying vessel visual simulation system & software development and integration[D]. Harbin: College of Mechanic and Electrical Engineering,Harbin Engineering University,2011.
[15] 金巖通. 基于OpenGL的虛擬視景仿真平臺開發(fā)[D]. 西安:西北工業(yè)大學機電學院,2006.
Jin Yan-tong. Development of virtual simulation system based on OpenGL[D]. Xi′an: College of Mechanic and Electrical Engineering,Northwestern Polytechnical University,2006.
[16] 劉沖. 深水鋪管作業(yè)視景仿真系統(tǒng)設計研究[D].哈爾濱:哈爾濱工程大學機電工程學院,2013.
Liu Chong. Design and research on visual simulation system of deepwater[D]. Harbin: College of Mechanic and Electrical Engineering,Harbin Engineering University,2013.
[17] Zhao D Y. Computer aided optimization technology based on OFFPIPE for offshore pipelineS-lay design[J]. Petroleum Engineering Construction,2011,69(6):520-527.
[18] Chen X,Lin Y,Wei L I. Semi-physical simulation test-bed for electro-hydraulic proportional pitch-controlled wind turbine system based on bladed[J]. Machine Tool & Hydraulics,2006,12(5):325-339.
[19] Babu K S,Ma E,Valle J W F. Underlying A4, symmetry for the neutrino mass matrix and the quark mixing matrix[J]. Physics Letters B,2003,552(3/4): 207-213.
[20] Zhou X,Sutulo S,Soares C G. Simulation of hydrodynamic interaction forces acting on a ship sailing across a submerged bank or an approach channel[J]. Ocean Engineering,2015,103(4):103-113.
[21] Zhao R,Biesheuvel P M,Wal A V D. Energy consumption and constant current operation in membrane capacitive deionization[J]. Energy & Environmental Science,2012,5(11):9520-9527.
[22] Horner R R,Welch E B,Seeley M R,et al. Responses of periphyton to changes in current velocity, suspended sediment and phosphorus concentration[J]. Freshwater Biology,2010,24(2):215-232.
[23] Zhao Q,Chen D,Shen L, et al. Stability analysis on steel pile in artificial bed under the action of wave-current force[J]. Journal of Jiangnan University,2014,85(26):963-978.
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
故事大王(2016年7期)2016-09-22 17:30:08