增強(qiáng)立尾效益的主動(dòng)流動(dòng)控制
2018-05-21 01:23:35朱自強(qiáng)王凱黃波恩
航空學(xué)報(bào) 2018年5期
關(guān)鍵詞:模型
朱自強(qiáng),王凱,黃波恩
北京航空航天大學(xué) 航空科學(xué)與工程學(xué)院,北京 100083
自有邊界層和邊界層分離的概念以來,分離流的控制就是學(xué)術(shù)界與航空界共同關(guān)注的研究方向之一。主動(dòng)流動(dòng)控制(AFC)的概念、方法和應(yīng)用的研究更在近年來發(fā)展成了一個(gè)獨(dú)立的學(xué)科分支。AFC指采用一定的方法通過相應(yīng)的執(zhí)行機(jī)構(gòu)(Actuator)向流動(dòng)注入能量以改變流動(dòng)結(jié)構(gòu),達(dá)到控制流動(dòng)分離的目的。不同的控制方法對(duì)應(yīng)不同的執(zhí)行機(jī)構(gòu)。Cattafesta和Sheplak對(duì)AFC已有的方法和執(zhí)行機(jī)構(gòu)作過評(píng)述[1],并給出了執(zhí)行機(jī)構(gòu)的分類(見圖1)。

圖1 主動(dòng)流動(dòng)控制方法和執(zhí)行機(jī)構(gòu)的分類[1]Fig.1 Classification of methods and actuators of active flow control [1]
盡管目前存在多種方法和執(zhí)行機(jī)構(gòu),但能從實(shí)驗(yàn)室樣機(jī)成功過渡到航空應(yīng)用的卻很少。如在流體類(Fluidic)中最早提出的控制分離的方法是定態(tài)抽吸(Suction)或吹氣(Blowing),雖然很多風(fēng)洞模型甚至試驗(yàn)樣機(jī)都證明了其有效性[2-3],卻因運(yùn)行抽吸/吹氣的裝置復(fù)雜性和附加重量抵消了所得的空氣動(dòng)力好處而至今未能應(yīng)用于生產(chǎn)型飛機(jī)上。本文將討論近年來作過系統(tǒng)研究且技術(shù)較成熟的流體類振蕩射流方法、裝置及其在提高立尾效率上的應(yīng)用。
1 AFC的振蕩射流方法和裝置
最早用于模擬計(jì)算機(jī)中流體放大器的振蕩射流概念雖不算太新,但用于主動(dòng)控制飛機(jī)繞流卻是近期才發(fā)展起來的[4-7]。
圖2(a)給出了振蕩射流的概念設(shè)計(jì)示意圖[8];當(dāng)出口噴流速度為超聲速時(shí),振蕩射流裝置(簡(jiǎn)稱激振器)內(nèi)來回振動(dòng)運(yùn)動(dòng)的流動(dòng)顯示如圖2(b) 所示[9],展向兩個(gè)振蕩射流裝置間分離流的相互作用可參考文獻(xiàn)[9];內(nèi)部流動(dòng)的數(shù)值模擬結(jié)果如圖2(c)所示[10]。其內(nèi)部流動(dòng)原理可簡(jiǎn)述為:從儲(chǔ)氣箱噴口出來的氣流沿上固壁流動(dòng),并形成激振器內(nèi)的一個(gè)主空穴(“相互作用區(qū)”),氣流沿曲壁繼續(xù)向出口流動(dòng),壓強(qiáng)增大,故部分氣流進(jìn)入上半?yún)^(qū)的反饋通道。此反饋氣流將從儲(chǔ)氣箱噴口處流出的氣流推向空穴區(qū)的下半?yún)^(qū),氣流遂沿下半?yún)^(qū)的曲壁流動(dòng),與沿上固壁的流動(dòng)過程一樣,使部分氣流進(jìn)入下半?yún)^(qū)的反饋通道。重復(fù)此流動(dòng)過程,遂形成了無需運(yùn)動(dòng)部件,只需保證供給穩(wěn)定的壓縮空氣即可沿翼展方向產(chǎn)生非定常(振蕩)射流。振蕩頻率由反饋通道的長(zhǎng)度決定,而展向偏角則由裝置具體設(shè)計(jì)而定。
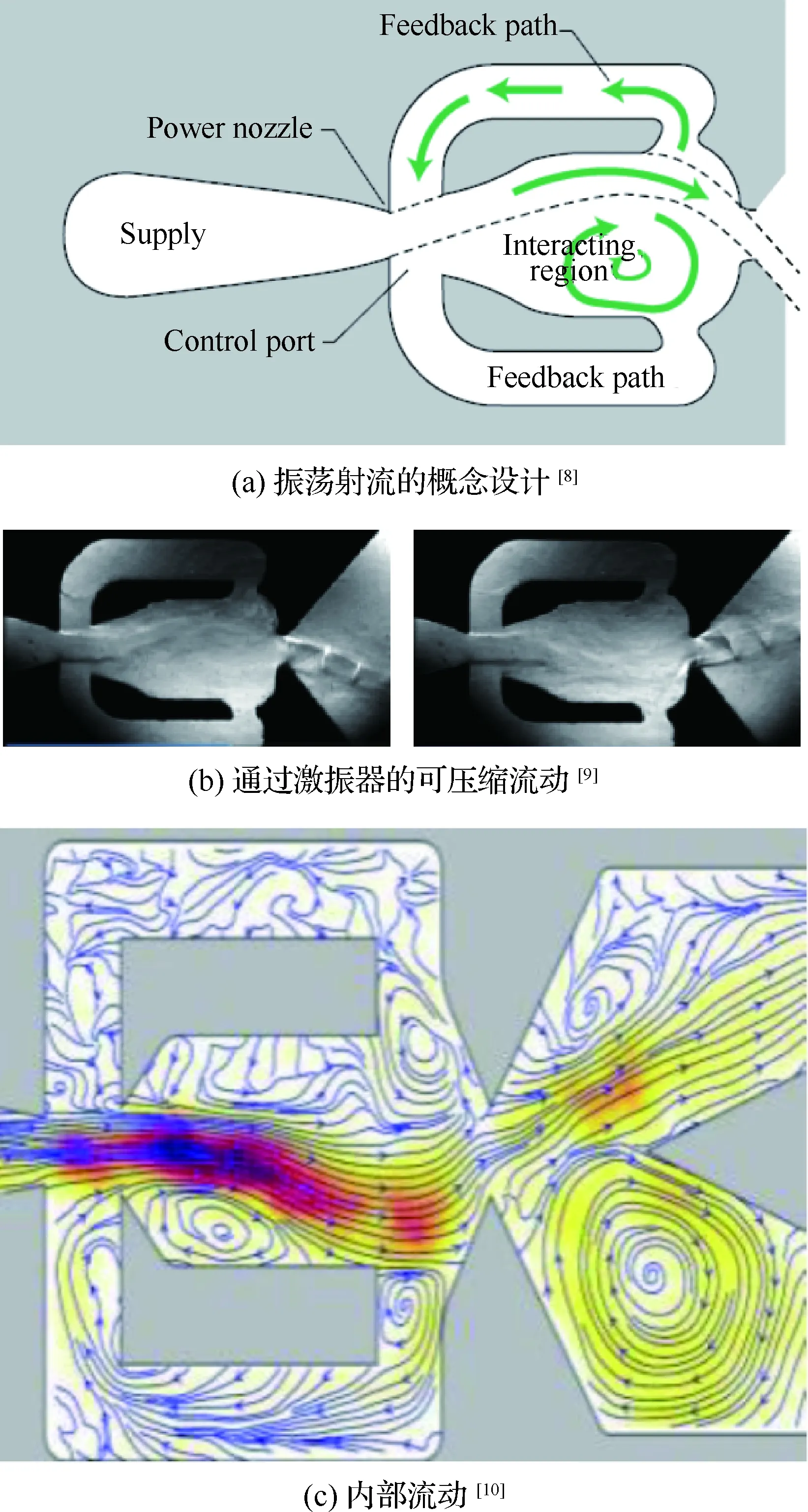
圖2 振蕩射流示意圖Fig.2 Schematic of oscillating jet
2 應(yīng)用振蕩射流增強(qiáng)立尾特性
現(xiàn)代雙發(fā)旅客機(jī)為了應(yīng)對(duì)起飛/著陸時(shí)(包括有側(cè)風(fēng)條件下)一個(gè)發(fā)動(dòng)機(jī)發(fā)生停車事故的危險(xiǎn)(適航規(guī)則要求),要求立尾的設(shè)計(jì)能保證有足夠大的側(cè)向力以平衡發(fā)動(dòng)機(jī)推力/阻力形成的力矩(見圖3[11])。
通常是針對(duì)某類系列機(jī)(如Boeing787-8/9/10)中機(jī)身最短的一款型號(hào)來設(shè)計(jì)立尾大小,這樣的立尾對(duì)加長(zhǎng)型的型號(hào)會(huì)顯得偏大,徒然增加了重量和阻力。若利用AFC,延遲在大偏角方向舵上可能的流動(dòng)分離,增大所產(chǎn)生的側(cè)向力,就可將立尾設(shè)計(jì)得較小,也能保證提供事故發(fā)生所需的方向控制和整個(gè)飛行包線內(nèi)的正常運(yùn)行。系統(tǒng)集成研究表明,這樣的設(shè)計(jì)安排可使飛機(jī)的重量和阻力減小,從而節(jié)省燃油的消耗。于是NASA針對(duì)未來N+2代民機(jī)發(fā)展所需先進(jìn)技術(shù)研究而設(shè)立ERA(Environmentally Responsible Aviation)項(xiàng)目,項(xiàng)目組先后資助了Rathay等[12-14]采用合成射流和Seele等[11,15-16]采用振蕩射流等AFC在縮比小模型上的風(fēng)洞試驗(yàn)。在比較試驗(yàn)結(jié)果后,又資助Boeing做了B-757全尺寸立尾組件在Ames NFAC 40 ft×80 ft (1 ft=0.304 8 m) 風(fēng)洞中的試驗(yàn)[17-18]和B-757 ecoDemonstration的飛行試驗(yàn),NASA/Boeing完成了振蕩射流AFC技術(shù)增強(qiáng)立尾效率的研究過程,將該項(xiàng)技術(shù)的技術(shù)成熟度(TRL)等級(jí)從3提升到6[19]。

圖3 發(fā)動(dòng)機(jī)事故時(shí)飛機(jī)需要的平衡[11]Fig.3 Necessary trim settings of an airplane in case of engine failure[11]
3 小模型的試驗(yàn)研究
3.1 合成射流技術(shù)
Rathay等采用合成射流技術(shù)在RPI (Rensselaer Polytechnic Institute)風(fēng)洞中做了4%和5%縮比立尾模型的風(fēng)洞試驗(yàn)[12-14]。合成射流激振器位于方向舵的鉸鏈軸位置。
圖4給出了風(fēng)洞模型圖和一個(gè)典型的結(jié)果[14],它表明在無側(cè)滑角(β*=0°)、舵偏角較大(δ*=0.6,δ= 30°)時(shí)合成射流AFC可將側(cè)向力增大20%(上標(biāo)*表示相對(duì)最大量的無因次量,ΔCY為側(cè)向力系數(shù)增量)。但隨著側(cè)滑角或舵偏角的增大,由于合成射流的動(dòng)量系數(shù)(Cμ=0.248%)相對(duì)較低,其效率亦隨之降低,表明這種技術(shù)無法完全抑制流動(dòng)的分離。
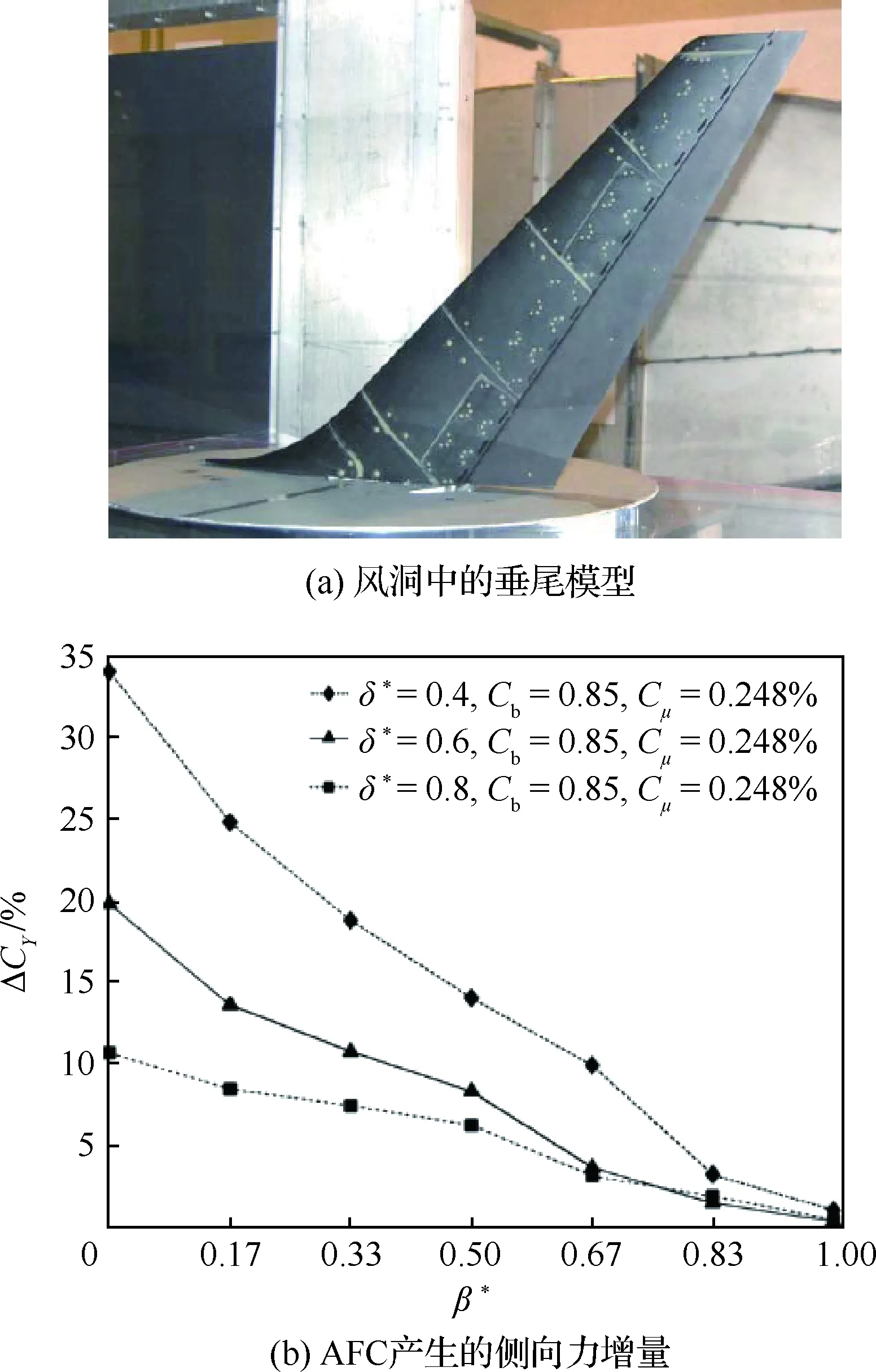
圖4 5%縮比模型的合成射流AFC試驗(yàn)[14]Fig.4 Synthetic jet AFC test on a 5% subscale model[14]
3.2 振蕩射流技術(shù)
Seele等采用振蕩射流技術(shù)在Caltech Lucas風(fēng)洞中做了14%縮比立尾模型的風(fēng)洞試驗(yàn)[11,15-16]。將32個(gè)振蕩射流激振器布置在方向舵鉸鏈軸處[15]或垂尾安定面后緣處[11],分別進(jìn)行了兩個(gè)系列的試驗(yàn)。
立尾試驗(yàn)?zāi)P偷囊硇筒捎肗ACA0012翼型,立尾前緣后掠角λ= 42°,平均氣動(dòng)弦長(zhǎng)為1.765 ft,帶有35%弦長(zhǎng)的方向舵,展長(zhǎng)為3.5 ft。試驗(yàn)風(fēng)洞截面為6 ft×5 ft,風(fēng)速為50 m/s。
圖5(a)給出安裝于風(fēng)洞中的立尾模型,圖5(b)給出了一個(gè)代表性結(jié)果,它表明大舵偏角(δR=30°)和零側(cè)滑角(β=0°)時(shí)動(dòng)量系數(shù)Cμ≈1.7%的振蕩射流可使側(cè)向力相比于無振蕩射流時(shí)值增大50%左右,即使較小的Cμ(≈ 0.5%)也可使側(cè)向力增大20%[11]。圖中CYn為相比于無振蕩射流時(shí)的側(cè)向力系數(shù),不同符號(hào)表示出口噴管喉道面積的尺寸,其中1 in=0.025 4 m。


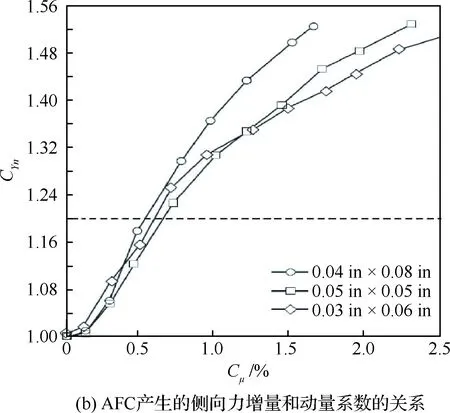
圖5 14%縮比模型的振蕩射流 AFC試驗(yàn)[11]Fig.5 Osillating jet AFC test on a 14% subscale model[11]
圖6表明了應(yīng)如何組合δR、β或Cμ來實(shí)現(xiàn)所需要的CYn[11]。當(dāng)人們?cè)谠O(shè)計(jì)立尾大小時(shí),在無AFC的條件下,若無側(cè)滑(β=0°)則即使δR=80%也無法實(shí)現(xiàn)所要求的側(cè)力CYn=1.2 (圖6(a)),因此只能加大立尾面積。若利用振蕩射流 (Cμ=1%),則β=0°時(shí)δR=50%即可達(dá)到所要求的側(cè)向力,不必加大立尾。若要求CYn= 1.3,為避免側(cè)滑,且δR=50%,則需要Cμ=2%。若仍用Cμ=1%就需要增大δR至60% (圖6(b))。

圖6 利用0.05 in×0.05 in的激振器實(shí)現(xiàn)所需CYn=1.2和1.3的方向舵偏角/側(cè)滑角的組合(U∞=40 m/s,Sp=1.5 in) [11]Fig.6 Necessary rudder/side slip combination to achieve a predefined CYn = 1.2 and 1.3 by using 0.05 in × 0.05 in actuators (U∞=40 m/s, Sp=1.5 in) [11]
雖然使用振蕩射流的控制效率存在著參數(shù)間復(fù)雜的耦合關(guān)系,但結(jié)果表明,只要優(yōu)化局部參數(shù),就可使側(cè)向力增大30%~40%[11]。
Seele等指出[11,16]:
1) 只要采用合理的質(zhì)量流量或動(dòng)量系數(shù),在舵鉸鏈軸附近布置振蕩射流激振器,可以提高控制效率50%,只需要Cμ< 1%就可實(shí)現(xiàn)大部分的獲益。
2) 激振器喉道截面積的形狀、大小和彼此的展向間距決定了系統(tǒng)的有效性。截面積的寬高比應(yīng)大于2,激振器均勻展向分布比集中分布于某些區(qū)域可獲得更好的效果。
3) 射流速度應(yīng)至少大于自由流速度的3倍,但必須保持亞聲速,只要Cμ較小(Cμ<0.5%)射流通過喉道速度是亞聲速,喉道截面積的形狀和尺度就不太影響控制效率。
4) 激振器位于方向舵鉸鏈軸附近效率更高。
4 系統(tǒng)集成和全尺寸立尾模型風(fēng)洞試驗(yàn)
基于縮比小尺度模型風(fēng)洞試驗(yàn)成果,在NASA資助下Boeing開展了一個(gè)AFC增強(qiáng)立尾控制性能飛行全尺寸系統(tǒng)集成的可行性研究,分析將合成射流及振蕩射流兩種AFC方法的小尺度試驗(yàn)結(jié)果推廣應(yīng)用于飛行條件時(shí)的獲益、代價(jià)和技術(shù)成熟度等[20]。研究結(jié)果認(rèn)為兩種控制方法都會(huì)帶來正的凈受益,如一架飛機(jī)飛行一年可節(jié)省的燃料,合成射流AFC系統(tǒng)為80 000 lbs (11 900 gallons),振蕩射流 AFC系統(tǒng)為104 000 lbs (15 500 gallons),但都需要進(jìn)一步確定:①在飛行尺度下AFC所需的輸入壓強(qiáng)、流量或功率等;②實(shí)際的器件是否能實(shí)現(xiàn);③在全尺寸條件下的凈收益。研究報(bào)告還認(rèn)為從近期看飛行尺度下合成射流激振器的技術(shù)成熟性相對(duì)更低些,更難實(shí)現(xiàn)可用的大尺寸激振系統(tǒng)。因此,Boeing和NASA決定只進(jìn)行振蕩射流系統(tǒng)增強(qiáng)立尾控制性能的全尺寸立尾模型風(fēng)洞試驗(yàn)研究[17-18]。
Boeing將一架B-757的立尾系統(tǒng)組件改裝成風(fēng)洞試驗(yàn)?zāi)P?圖7),并在NFAC風(fēng)洞中做試驗(yàn)。以正常風(fēng)速100 Knots (Ma≈0.15,Re≈15×106)和最大風(fēng)速130 Knots (Ma≈0.2,Re≈2×107),方向舵偏角為0°~30°,側(cè)滑角為-20°~20°狀態(tài),完成了檢測(cè)振蕩射流系統(tǒng)增強(qiáng)立尾控制效率的試驗(yàn)[17]。
借鑒Seele等的經(jīng)驗(yàn),并考慮到工藝性,37個(gè)振蕩射流激振器被布置在沿立尾安定面的后緣附近,見圖8,每個(gè)激振器由一個(gè)獨(dú)立的壓力調(diào)節(jié)閥控制。激振器出口喉道截面積寬高比為2,激振器沿展向的間距為喉道截面積寬度的16.7倍。試驗(yàn)中作了絲線的流場(chǎng)觀察、空氣動(dòng)力和力矩的測(cè)量,以及AFC系統(tǒng)數(shù)據(jù)的測(cè)定[18]。
圖9給出了試驗(yàn)的代表性結(jié)果,分別給出了β=0°和-7.5°時(shí)側(cè)向力增量ΔCY隨Cμ的變化[18],其中ΔCY表示相對(duì)于無AFC時(shí)各β值下側(cè)向力系數(shù)的增量。圖中還給出了β=0°時(shí)用CFD計(jì)算的無AFC的立尾無黏側(cè)力值。基于前述系統(tǒng)集成研究結(jié)果,將增量20%作為系統(tǒng)控制流動(dòng)分離效率的目標(biāo)值。從圖9(a)看到,β=0°時(shí),不同數(shù)量激振器開啟的結(jié)果基本上重疊成一個(gè)線集,而且在中到高動(dòng)量系數(shù)時(shí),31個(gè)和18個(gè)開啟的效益比37個(gè)開啟的還高些。β=-7.5°時(shí)結(jié)果類似(圖9(b))。從圖9(a)還可知,當(dāng)β=0°和Cμ>0.3%時(shí),大多數(shù)情況都能實(shí)現(xiàn)側(cè)向力20%的增量。側(cè)向力隨Cμ變化的全尺寸模型結(jié)果(圖9(a))與縮比模型結(jié)果(圖5(b))具有類似的變化趨勢(shì),這表明在將小尺度模型的結(jié)果向大尺度推廣時(shí),Cμ是一個(gè)合適的參數(shù)。由于β= -7.5°時(shí)無AFC的側(cè)力值本身就應(yīng)為β=0°時(shí)的1.67倍,因此這時(shí)的側(cè)向力增量也應(yīng)是β=0°時(shí)的1.67倍。從圖9(b)看到要得到20%的側(cè)向力增量,動(dòng)量系數(shù)要增大0.2%。而Cμ≤ 0.6%時(shí)只有31個(gè)和37個(gè)激振器開啟時(shí)才可獲得該結(jié)果。37個(gè)激振器中令翼梢區(qū)的6個(gè)激振器關(guān)閉就得到了31個(gè)激振器的安排,從試驗(yàn)結(jié)果看,收益反而高于37個(gè)。此外還減少了所需的供氣流量,簡(jiǎn)化了系統(tǒng)。這個(gè)結(jié)果與縮比模型的結(jié)果一致[11],因此在隨后的飛行試驗(yàn)中就采用31個(gè)激振器。

圖7 波音將在Evergreen中的B-757立尾(上圖)改裝成位于NFAC 40 ft×80 ft風(fēng)洞的整流罩上(下圖) [17]Fig.7 B-757 vertical tail being removed at Evergreen air center (top), and the tail model installed on top of a blister fairing in the NFAC 40 ft×80 ft wind tunnel (bottom) [17]

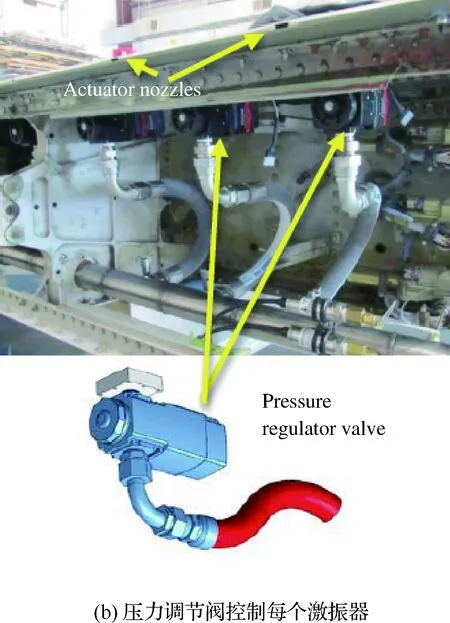
圖8 振蕩射流激振器和安裝在模型內(nèi)的壓力調(diào)節(jié)閥[18]Fig.8 Oscillating jet actuators and pressure regulator valves installed on the model[18]
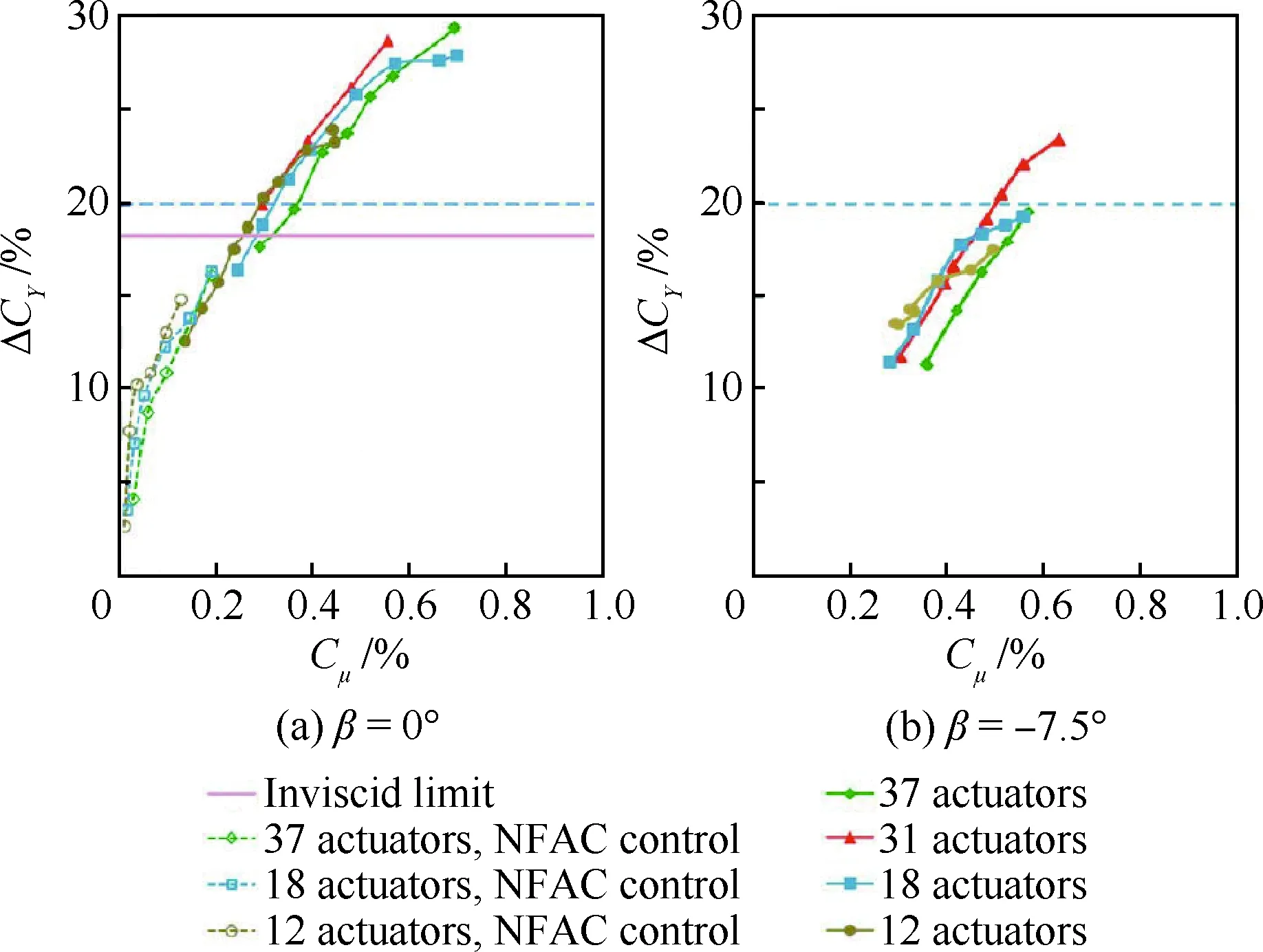
圖9 側(cè)向力增量與動(dòng)量系數(shù)的關(guān)系(δR=30°,U∞= 100 knots) [18]Fig.9 Side force enhancement vs momentum coefficient (δR=30°, U∞=100 knots) [18]
圖10給出了絲線的流動(dòng)顯示[19],圖中箭頭表明方向舵上的流動(dòng)方向,三角形表示振蕩射流激振器的位置。圖10(a)表明無AFC時(shí)方向舵上的絲線大多指向翼梢方向,且混亂地旋轉(zhuǎn),而圖10(b)表明絲線是較穩(wěn)定的,并指向下游(AFC作用下的附著流)。圖中圓圈內(nèi)的展向流動(dòng)指向翼梢,與翼梢渦的方向很一致,這說明此處可以撤掉6個(gè)激振器,不會(huì)影響方向舵上的整體流動(dòng)。流動(dòng)顯示表明,AFC改善了方向舵的效益。
圖10 表面流線的流動(dòng)顯示(δR=30°,U∞= 100 knots,β=0°) [19]Fig.10 Flow visualization of surface stheamlines (δR=30°, U∞=100 Knots, and β=0°) [19]
表面壓強(qiáng)分布云圖也表明,無論β=0°或β=-7.5°,振蕩射流 AFC: ①增大了方向舵整個(gè)翼展鉸鏈軸附近的吸力;②使后緣附近有更好的壓強(qiáng)恢復(fù);③且其誘導(dǎo)的附著流沿著翼展方向很均勻。兩個(gè)β時(shí)的差異僅在于吸力峰值位置不同[18]。
通常表征振蕩射流 AFC氣動(dòng)特性的動(dòng)量系數(shù)Cμ和功率系數(shù)Cπ可分別寫為[17]
(1)
(2)

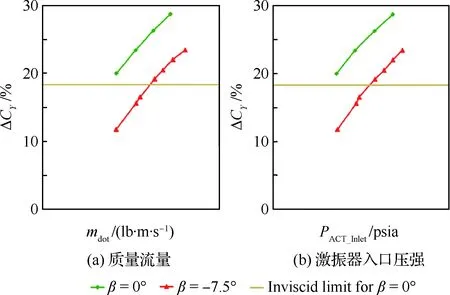
圖11 β=0°和β=-7.5°時(shí)側(cè)向力增量隨質(zhì)量流量和進(jìn)口壓強(qiáng)的變化(31個(gè)激振器,δR=30°,U∞=100 knots) [17]Fig.11 Side force enhancement vs mass flow and actuator inlet pressure for β=0° and β=-7.5°(31 actuators configuration, δR=30°, U∞=100 knots) [17]
圖12表示ΔCY隨Cμ和功率系數(shù)Cπ的變化[17],由圖可知,為達(dá)到同樣的側(cè)向力增量,β=-7.5°和β=0°相比Cμ需增大0.2%左右,Cπ需近似增大5%。圖13給出了ΔCY隨舵偏角δrudder的變化[17],由圖可知,在δR<30°時(shí),雖然小偏角時(shí)分離流很小,但AFC仍是有效的,當(dāng)然這時(shí)ΔCY也要比大偏角時(shí)小得多。
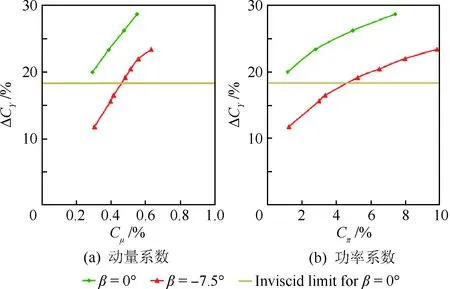
圖12 β=0°和β=-7.5°時(shí)側(cè)向力增量隨動(dòng)量系數(shù)和功率系數(shù)的變化 (31個(gè)激振器,δR=30°,U∞=100 Knots) [17]Fig.12 Side force enhancement vs momentum and power coefficients for β= 0° and β=-7.5° (31 actuators configuration, δR=30°, U∞=100 knots) [17]

圖13 側(cè)向力增量隨舵偏角的變化 (31個(gè)激振器,δR=30°,U∞=100 knots)[17]Fig.13 Side force enhancement vs rudder deflection for 31 actuators configuration (δR=30°,U∞=100 knots) [17]
圖14(a)和圖14(b)給出了振蕩射流主動(dòng)流動(dòng)控制和被動(dòng)控制(漩渦發(fā)生器,VGs)分別在U∞= 100 knots和β=0°,-7.5°時(shí)最佳的ΔCY隨舵偏角δrudder的變化曲線[17,19]。由圖可見VG有一定的增益效果(~10%),但在δR=27.5°(β=0°)和25°(β=-7.5°)時(shí)開始失效。而31個(gè)振蕩射流激振器的AFC可提供的側(cè)力增量值在β=0°和最大舵偏角時(shí)是VG值的兩倍,在β=-7.5°和舵偏角≥25°時(shí)是VG值的4~8兩倍[17,19]。
31個(gè)振蕩射流 AFC全尺寸模型的風(fēng)洞試驗(yàn)結(jié)果可歸結(jié)為:在100 knots速度下,β=0°和β=-7.5°時(shí),最大舵偏角的側(cè)向力增量為20%,甚至更大。在β=-7.5°時(shí),要取得與β=0°相同的增量值需為其提供更高的氣動(dòng)能量[17,19]。
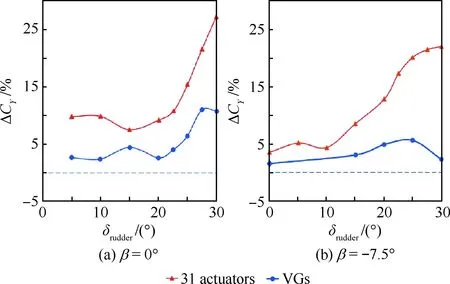
圖14 振蕩射流 AFC和VGs的側(cè)向力增量隨舵偏角的變化(U∞ = 100 knots) [19]Fig.14 Side force enhancement of oscillating AFC and VGs vs rudder deflection (U∞ =100 knots) [19]
5 B-757 ecoDemonstrator的飛行試驗(yàn)
2015年春,波音進(jìn)行了B-757 ecoDemonstrator的飛行試驗(yàn)驗(yàn)證[19],目的是將振蕩射流 AFC系統(tǒng)集成于真實(shí)飛機(jī)上,在飛行中測(cè)量其提高方向舵效率的數(shù)據(jù),并與全尺寸風(fēng)洞模型的試驗(yàn)數(shù)據(jù)和CFD計(jì)算結(jié)果相比較,評(píng)估振蕩射流 AFC的有效性,從而完成技術(shù)成熟度的提升。飛行試驗(yàn)包括頭部定態(tài)指向的側(cè)滑機(jī)動(dòng),模擬發(fā)動(dòng)機(jī)故障后飛機(jī)的平衡和減速等。
振蕩射流 AFC系統(tǒng)被安置于立尾安定面和后機(jī)身內(nèi),從輔助動(dòng)力單元(APU)的壓縮機(jī)中引氣,為系統(tǒng)提供噴射的空氣。考慮到安定面和方向舵的結(jié)構(gòu)要求,后機(jī)身內(nèi)安置了一臺(tái)氣熱交換機(jī),以冷卻APU的空氣。在安定面后緣的右側(cè)面沿著方向舵鉸鏈軸線方向安置31個(gè)振蕩射流噴管出口,噴口垂直后緣,指向下游。飛行時(shí)有一架波音T-33飛機(jī)伴隨飛行,對(duì)布置在B-757方向舵上的絲線照相,以提供流動(dòng)顯示照片。
圖15為B-757和T-33伴飛的飛行圖[19]。圖16為T-33拍攝有/無振蕩射流 AFC的瞬時(shí)流動(dòng)錐照片[19]。比較不同瞬時(shí)照片可見,關(guān)閉AFC時(shí)多處流動(dòng)錐的指向前后時(shí)刻都不一致,表明流態(tài)是非定態(tài)分離的。而開啟AFC后,多處流動(dòng)錐的指向前后時(shí)刻很一致,表明減小了方向舵上的分離流。飛行員的反饋也證實(shí)了開啟AFC后飛行更平穩(wěn)。

圖15 B-757 ecoDemonstrator的飛行試驗(yàn)[19]Fig.15 B-757 ecoDemonstrator during flight test[19]
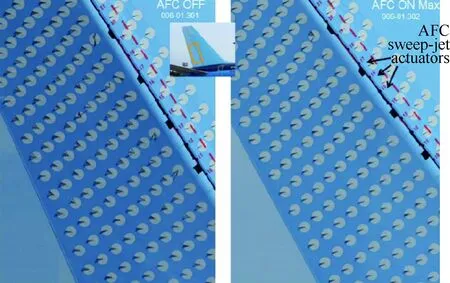
圖16 飛行條件下有/無AFC時(shí)流動(dòng)錐照片[19]Fig.16 Composite pictures of flow cones with AFC off (left) and on (right) for the flight conditions[19]
Boeing公司將飛行試驗(yàn)數(shù)據(jù)導(dǎo)入B-757的飛行模擬器,應(yīng)用已有的方法分析了振蕩射流AFC開或關(guān)時(shí)方向舵的效率。圖17給出了100%質(zhì)量流量和31個(gè)激振器開啟時(shí)ΔCY與β的關(guān)系[19]。由于是多維參數(shù)空間(如β、δR、質(zhì)量流率等),圖中曲線由多個(gè)孤立點(diǎn)用直線連接。由圖可知在固定β下隨著舵偏角增大振蕩射流 AFC逐漸增大方向舵的效率。在30°舵偏角,β≈+5°時(shí)側(cè)向力增量達(dá)到6%(與期望值一致)。在固定舵偏角下隨著β趨于0°和負(fù)值,振蕩射流 AFC的影響也顯著地增大。
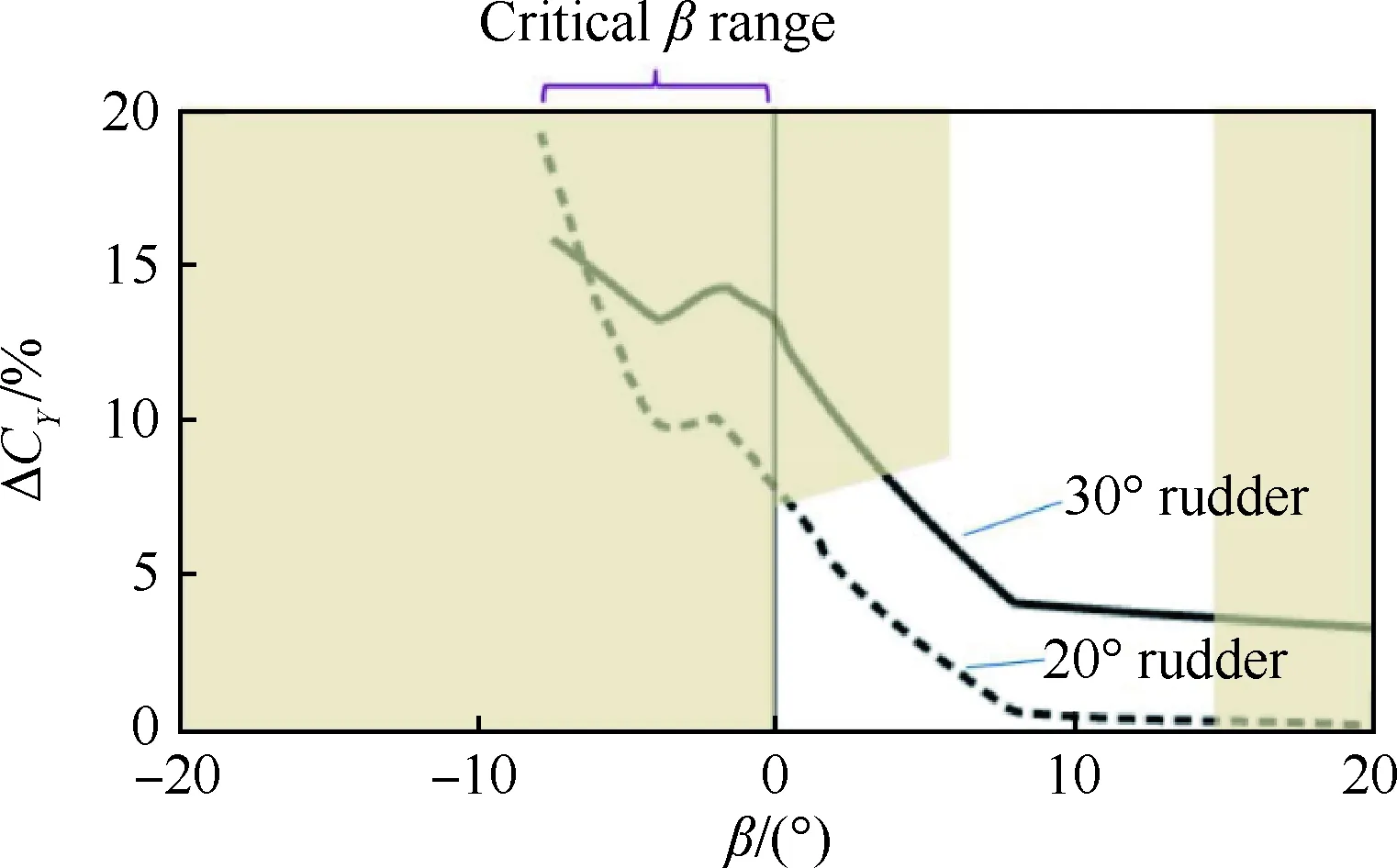
圖17 AFC提高的B-757方向舵效率(基于飛行數(shù)據(jù)和全尺寸風(fēng)洞數(shù)據(jù),31個(gè)激振器,100%質(zhì)量流量,陰影面積表示無飛行數(shù)據(jù)) [19]Fig.17 Predicted B-757 ecoDemonstrator percentage increase in rudder effectiveness due to AFC based on flight test and full-scale wind tunnel data (31 actuators, and 100% mass flow, shaded area: no flight test data available)[19]
基于飛行數(shù)據(jù)和全尺寸模型風(fēng)洞試驗(yàn)數(shù)據(jù),Boeing公司估計(jì)出,在β=0°~-7.5°,30°舵偏角下,側(cè)向力增量值約為13%~16%[19]。如前所述的可行性研究表明,此量級(jí)的側(cè)向力增量可節(jié)省燃油15 500 gallons/airplane/year。
圖18給出了NASA和Boeing為提高振蕩射流 AFC的技術(shù)成熟度(TRL)進(jìn)行3個(gè)研究階段(縮比模型風(fēng)洞試驗(yàn)、全尺寸模型風(fēng)洞試驗(yàn)、飛行試驗(yàn))的時(shí)間里程碑[19],可見此項(xiàng)先進(jìn)技術(shù)從基礎(chǔ)研究到應(yīng)用研究的全過程歷時(shí)6年才完成。據(jù)稱Boeing B-787-9上已應(yīng)用了此項(xiàng)AFC技術(shù)。

圖18 AFC增強(qiáng)立尾技術(shù)研究的時(shí)間表和里程碑[19]Fig.18 Timeline and milestone completion for AFC-enhanced vertical tail technology[19]
6 結(jié)束語(yǔ)
本文簡(jiǎn)要地討論了加強(qiáng)立尾控制特性的振蕩射流 AFC的方法和系統(tǒng),從學(xué)校實(shí)驗(yàn)室的基礎(chǔ)研究開始,經(jīng)歷了縮比模型、全尺寸模型的風(fēng)洞試驗(yàn)研究,最終在2015春實(shí)現(xiàn)了B-757 ecoDemonstrator的飛行試驗(yàn)。對(duì)飛行員的反饋意見和飛行試驗(yàn)數(shù)據(jù)的初步分析表明,振蕩射流AFC是有效的,實(shí)現(xiàn)了較平穩(wěn)的飛行和增強(qiáng)立尾的控制特性,獲得了側(cè)滑角β= 0°~-7.5°,30°方向舵偏角下13%~16%的側(cè)向力增量,飛行試驗(yàn)取得了成功。整個(gè)研究歷史歷時(shí)6年,完成了技術(shù)成熟度從等級(jí)3~6的跨越,是近期研究較成功的AFC方法之一。從全過程的研究結(jié)果看到,基礎(chǔ)研究所得的獲益數(shù)據(jù)最高,這表明后期的全尺寸模型風(fēng)洞試驗(yàn)以及飛行試驗(yàn)等TRL等級(jí)更高的研究對(duì)實(shí)現(xiàn)一項(xiàng)先進(jìn)技術(shù)在工程實(shí)踐的應(yīng)用的絕對(duì)必要性。
民機(jī)設(shè)計(jì)者對(duì)應(yīng)用AFC技術(shù)提高高升力裝置性能的要求十分迫切,雖然這很困難。本文作者在文獻(xiàn)[21]中討論了AFC技術(shù)控制高升力裝置流動(dòng)分離的部分研究現(xiàn)狀和結(jié)果,介紹了Boeing公司對(duì)在民機(jī)高升力系統(tǒng)中AFC應(yīng)用前景所作的一個(gè)初步評(píng)估[22],指出最有可能的應(yīng)用領(lǐng)域是替代現(xiàn)有的帶縫后緣襟翼系統(tǒng);應(yīng)用的效益并不在于改進(jìn)空氣動(dòng)力性能,而在于簡(jiǎn)化和/或減小現(xiàn)有系統(tǒng)的尺寸,以減輕重量、降低系統(tǒng)復(fù)雜性和價(jià)格。該評(píng)估還提出了今后尚需進(jìn)一步研究的方向[21-22]。隨著綠色航空的要求,降低噪聲也是重要的。期望本文討論的振蕩射流 AFC技術(shù)在立尾上的成功應(yīng)用有助于加速高升力裝置的AFC研究進(jìn)展。
參 考 文 獻(xiàn)
[1] CATTAFESTA L N, SHEPLAK M. Actuators for active flow control[J]. Annual Review of Fluid Mechanics, 2011, 43(43): 247-272.
[2] BETZ A. History of boundary layer control in Germany[M]∥LACHMANN G V, editor. Boundary Layer and Flow Control. Its Principles and Application. Vol.1. New York: Pergamon Press, 1961.
[3] HEAD M R. History of research on boundary layer control for low drag in U.K.[M]∥LACHMANN G V, editor. Boundary layer and flow control. Its principles and application. Vol.1. New York: Pergamon Press, 1961.
[4] SEELE R, TEWES P, WOSZIDLO R, et al. Discrete sweeping jets as tools for improving the performance of the V-22[J]. Journal of Aircraft, 2010, 46(6): 2098-2106.
[5] PHILLIPS E, WOSZIDLO R, WYGNANSKI I. The dynamics of separation control on a rapidly actuated flap: AIAA-2010-4246[R]. Reston, VA: AIAA, 2010.
[6] DESALVO M, WHALEN E, GLEZER A. High-lift enhancement using active flow control: AIAA-2011-3355 [R]. Reston, VA: AIAA, 2011.
[7] TEWES P, TAUBERT L, WYGNCENSKI I J. On the use of sweeping jets to augment the lift of a Lambda-wing: AIAA-2010-4689 [R]. Reston, VA: AIAA, 2010.
[8] ROMAN G, RAGHU S. Cavity resonance suppression using miniature fluidic oscillators[J]. AIAA Journal, 2004, 42(12): 2608-2611.
[9] WOSZIDLO R, WYGNANSKI I J. Parameters governing separation control with sweeping jet actuators: AIAA-2011-3172 [R]. Reston, VA: AIAA, 2011.
[10] VATSA V, KOKLU M, WYGNANSKI I J. Numerical simulation of fluidic actuators for flow control applications: AIAA-2012-3239[R]. Reston, VA: AIAA, 2012.
[11] SEELE R, GRAFF E, GHARIB M, et al. Performance enhancement of a vertical tail model with sweeping jet actuators: AIAA-2013-0411[R]. Reston, VA: AIAA, 2013.
[12] RATHAY N, BOUCHER M, AMITAY M, et al. Performance enhancement of a vertical stabilizer using synthetic jet actuators: No sideslip: AIAA-2012-0071[R]. Reston, VA: AIAA, 2012.
[13] RATHAY N, BOUCHER M, AMITAY M, et al. Performance enhancement of a vertical stabilizer using synthetic jet actuators: Non-zero sideslip: AIAA-2012-2657[R]. Reston, VA: AIAA, 2012.
[14] RATHAY N, BOUCHER M, AMITAY M, et al. Parametric study of synthetic jet based control for performance enhancement of a vertical tail[J]. AIAA Journal, 2014, 52(11): 2440-2454.
[15] SEELE R, GRAFF E, GHARIB M, et al. Improving rudder effectiveness with sweeping jet actuators: AIAA-2012-3244[R]. Reston, VA: AIAA, 2012.
[16] GRAFF E, SEELE R, LIN J C, et al. Sweeping jet actuators—A new design tool for high lift generation[R]. 2013.
[17] WHALEN E A, LACY D, LIN J C, et al. Performance enhanced of a full scale vertical tail model equipped with active flow control: AIAA-2015-0784[R]. Reston, VA: AIAA, 2015.
[18] ANDINO M Y, LIN J C, WASHBURN A E, et al. Flow separation control on a full scale vertical tail model using sweeping jet actuators: AIAA-2015-0785[R]. Reston, VA: AIAA, 2015.
[19] LIN J C, ANDINO M Y, ALEXANDER M G, et al. An overview of active flow control enhanced vertical tail technology development: AIAA-2016-0056[R]. Reston, VA: AIAA, 2016.
[20] MOONEY H P, BRANDT J B, LACY D S, et al. AFC-enabled vertical tail system integration study: NASA/CD-2014-218168[R]. Washington, D.C.: NASA, 2014.
[21] 朱自強(qiáng), 吳宗成, 陳迎春, 等. 民機(jī)空氣動(dòng)力設(shè)計(jì)先進(jìn)技術(shù)[M]. 上海: 上海交通大學(xué)出版社, 2013.
ZHU Z Q, WU Z C, CHEN Y C, et al. Civil aircraft aerodynamic design advanced technology[M]. Shanghai: Shanghai Jiaotong University Press, 2013 (in Chinese).
[22] MCLEAN J D, CROUCH J D, STONER R C, et al. Study of the application of separation control by unsteady excitation to civil transport aircraft: NASA-CR-209338[R]. Washington, D.C.: NASA, 1999.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19