基于電池荷電軌跡信息的混合動力電動汽車能量管理策略
2018-05-21 03:41:32
汽車文摘 2018年5期
本文提出了一種利用預覽行駛周期信息,動態規劃混合動力電動汽車能量的管理控制策略。動態規劃是一種很有前景的混合動力電動汽車(圖1)能量管理問題的解決方案,但由于其非因果特性,只能利用預覽行駛周期信息實現全局最優。
由于最近的行駛周期預測算法有助于預覽行駛周期信息的使用,因此,基于預覽行駛周期信息的假設,提出了基于規則的混合動力電動汽車能量管理策略(圖2)。這一策略包括動態規劃計算和基于規則的控制策略,根據給定的預測行駛周期信息,動態規劃分析車輛電量狀態和行駛距離的最優控制。
文中提出的基于規則的控制策略將車輛的需求功率分配到發動機和電動機,進而從動態規劃中獲得目標電池充電狀態軌跡。動態規劃能量管理策略基于預測的行駛周期信息,包括動態規劃和使用它的最優控制結果。通過提取車輛行駛途中最佳的電池電量狀態軌跡(圖3),根據這一目標電池電量狀態,基于規則的控制策略控制發動機和電動機。
文章對不同的能量管理策略進行了模擬計算,并討論了采用動態規劃能源管理策略的仿真結果,并將這一策略的燃料經濟性與其他能源管理策略進行了比較。最后的結果表明,動態規劃可以實現混合動力電動汽車的實時控制,通過對未來行駛周期信息更精確的預測,可以實現混合動力汽車更高的燃油經濟性。

圖1 并聯HEV動力總成
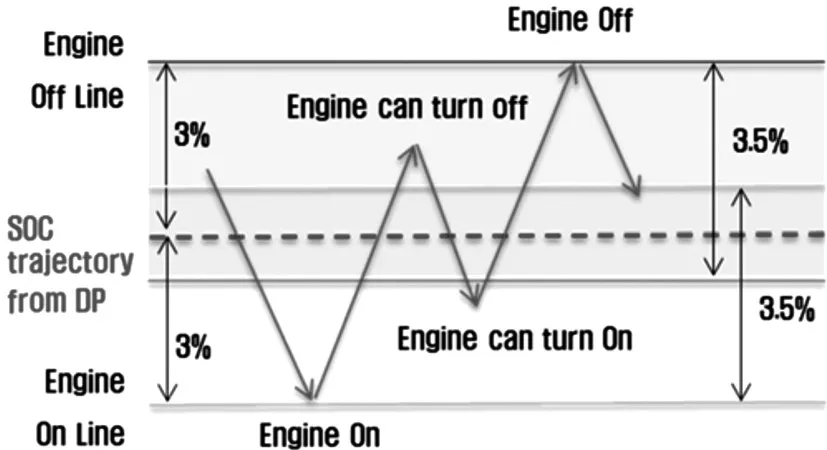
圖2 總體能量管理策略

圖3 電池SOC跟隨概念
猜你喜歡
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中華手工(2017年2期)2017-06-06 23:00:31
中國衛生(2016年2期)2016-11-12 13:22:16
通信電源技術(2016年1期)2016-04-16 04:57:26
中國工程咨詢(2016年4期)2016-02-14 07:28:28
中外會展(2014年4期)2014-11-27 07:46:46