貨運(yùn)車輛車載動(dòng)態(tài)稱重的同步采集系統(tǒng)
2018-05-16 09:29:22,,,
單片機(jī)與嵌入式系統(tǒng)應(yīng)用 2018年5期
,,,
(成都信息工程大學(xué) 通信工程學(xué)院,成都 610225)
引 言
近年來,隨著我國(guó)經(jīng)濟(jì)發(fā)展的需要,道路交通迎來了迅猛發(fā)展的機(jī)會(huì),但是道路安全形勢(shì)依然嚴(yán)峻,而大型貨運(yùn)車輛是影響道路安全的主要因素[1]。貨運(yùn)車輛的重量監(jiān)測(cè)對(duì)道路安全十分重要。車輛動(dòng)態(tài)稱重(Weigh-In-Motion,WIM)發(fā)展已久,目前車輛的動(dòng)態(tài)稱重主要是基于軸重檢測(cè),讓車輛通過軸重稱重平臺(tái),達(dá)到動(dòng)態(tài)稱重的目的[2],關(guān)于車輛動(dòng)態(tài)稱重的濾波算法也逐步深入[3-4]。
另外,貨運(yùn)車主也非常關(guān)心自己貨物在運(yùn)輸途中是否有丟失。車載動(dòng)態(tài)稱重是另一種車輛動(dòng)態(tài)稱重的方式,將稱重傳感器安裝于車上,結(jié)合動(dòng)態(tài)稱重的濾波算法,通過本地組網(wǎng)以及物聯(lián)網(wǎng)技術(shù)使得貨運(yùn)車主、貨運(yùn)公司以及交管部門都能實(shí)時(shí)監(jiān)測(cè)到該貨車的載荷情況,可以提高貨運(yùn)車輛稱重的高效性以及運(yùn)輸過程的透明性。
汽車懸架是汽車連接車架與車軸的裝置,起著傳力、緩沖的作用[5]。目前,國(guó)內(nèi)載貨汽車的前后懸架仍廣泛使用鋼板彈簧懸架系統(tǒng),因此可根據(jù)鋼板彈簧懸架系統(tǒng)的形變量來獲得其所承受的載荷量[6]。
鋼板彈簧位于貨車的不同部位,對(duì)于大型載荷貨車而言,它們之間的距離就相差更大。為了靈活地對(duì)各個(gè)鋼板彈簧形變進(jìn)行檢測(cè),我們使用多個(gè)采集器對(duì)不同位置的鋼板彈簧做形變檢測(cè),檢測(cè)的結(jié)果將返回。涉及到多機(jī)通信,需要對(duì)鏈路進(jìn)行控制,以保證數(shù)據(jù)的正常傳輸。采集系統(tǒng)為一主多從結(jié)構(gòu),RS485的下行支路(主機(jī)到從機(jī))由單臺(tái)主機(jī)控制,不會(huì)產(chǎn)生鏈路沖突,所以需要對(duì)上行支路進(jìn)行通信控制。本文介紹基于鋼板彈簧形變檢測(cè)的稱重傳感器設(shè)計(jì)和基于RS485的分時(shí)通信方案,并由二者構(gòu)建出動(dòng)態(tài)稱重的同步采集系統(tǒng)。
1 系統(tǒng)總體設(shè)計(jì)
系統(tǒng)由采集器、RS485通信模塊以及上位機(jī)部分組成。采集器以STM8單片機(jī)為核心,負(fù)責(zé)A/D轉(zhuǎn)換控制,并可以進(jìn)行簡(jiǎn)單濾波預(yù)處理。每一個(gè)采集器負(fù)責(zé)一塊鋼板彈簧形變值采集,可以方便地對(duì)不同位置的鋼板彈簧懸架做不同的濾波預(yù)處理和載荷分析,以提高動(dòng)態(tài)稱重算法的靈活性。上位機(jī)由STM32單片機(jī)或PC機(jī)構(gòu)成,是通信系統(tǒng)的主機(jī),負(fù)責(zé)協(xié)調(diào)各采集器的工作。
實(shí)現(xiàn)同步采集,通信是至關(guān)重要的一部分。通過制定相應(yīng)通信協(xié)議,并對(duì)上行支路采用時(shí)分復(fù)用的思想進(jìn)行控制,使得采集系統(tǒng)做到同步采集、分時(shí)傳送功能。系統(tǒng)設(shè)計(jì)框圖如圖1所示。
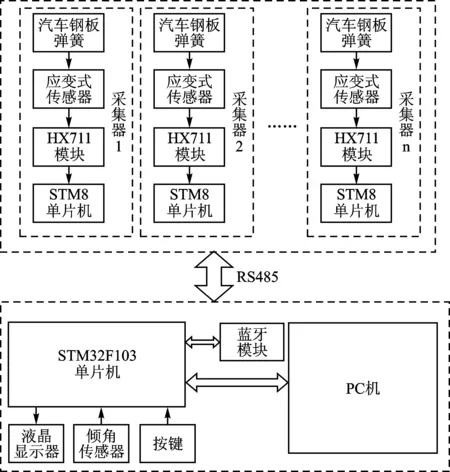
圖1 系統(tǒng)總體設(shè)計(jì)框圖
2 主要硬件設(shè)計(jì)
2.1 應(yīng)變式傳感器設(shè)計(jì)
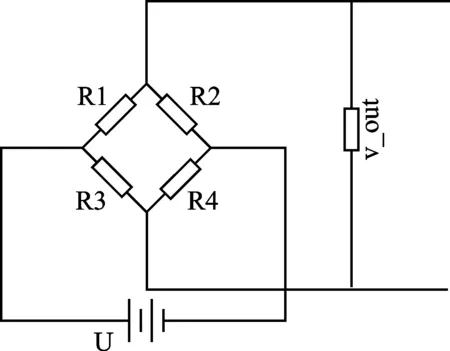
圖2 惠斯登恒壓電橋
鋼板彈簧中的一固定小段的長(zhǎng)度l變化與車輛的載重成線性關(guān)系,因此,可以通過檢測(cè)l變化得到車輛的載重信息[7]。應(yīng)變式壓力傳感器是一種傳感裝置,是利用彈性敏感元件和應(yīng)變計(jì)將被測(cè)壓力轉(zhuǎn)換為相應(yīng)電阻值變化的壓力傳感器[8]。本文選用箔式應(yīng)變片制作稱重傳感器,它具有較高的測(cè)量精度和較寬的線性范圍。當(dāng)應(yīng)變片受力發(fā)生變形時(shí),則促使箔式電阻阻值發(fā)生變化,通過測(cè)量電路將此阻值的變化轉(zhuǎn)換成電壓變化,并由A/D采集器獲取該變化。惠斯登恒壓電橋是構(gòu)成應(yīng)變式傳感器的常用測(cè)量電路[9],電橋原理圖見圖2。圖中R1、R2、R3、R4使用高精度箔式電阻應(yīng)變片,組成全橋式等臂電橋。
應(yīng)變式傳感器的設(shè)計(jì)應(yīng)盡量減少自身的不穩(wěn)定因素帶來的誤差。引起應(yīng)變傳感器誤差的因素有電橋不平衡、零點(diǎn)偏移,參考文獻(xiàn)[8]介紹了在橋臂上串聯(lián)溫度系數(shù)極低的錳銅絲來補(bǔ)償因電橋中應(yīng)變電阻阻值不同帶來的電橋不平衡,串聯(lián)溫度系數(shù)大且很穩(wěn)定的銅絲來補(bǔ)償零點(diǎn)漂移。補(bǔ)償電路如圖3所示。R1、R2、R3、R4為應(yīng)變電阻,Rt為電橋平衡電阻,Rs為零點(diǎn)補(bǔ)償電阻。
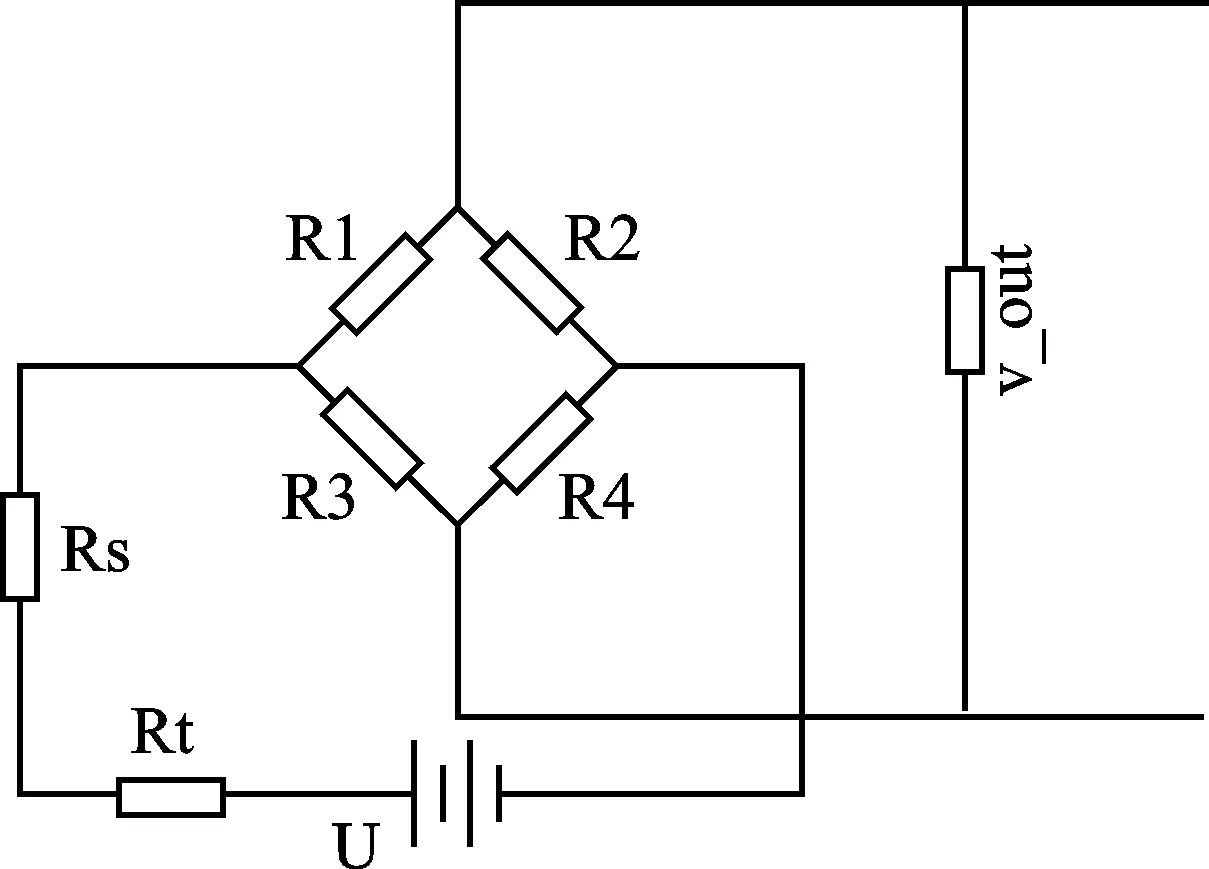
圖3 補(bǔ)償后電路
鋼板彈簧模型圖如圖4所示,由參考文獻(xiàn)[3]可知道,1處為鋼板彈簧主應(yīng)變區(qū)。為了使應(yīng)變片形變反映鋼板彈簧的垂直主應(yīng)力,將應(yīng)變片貼于1處,使其形變方向與鋼板彈簧主形變方向平行。
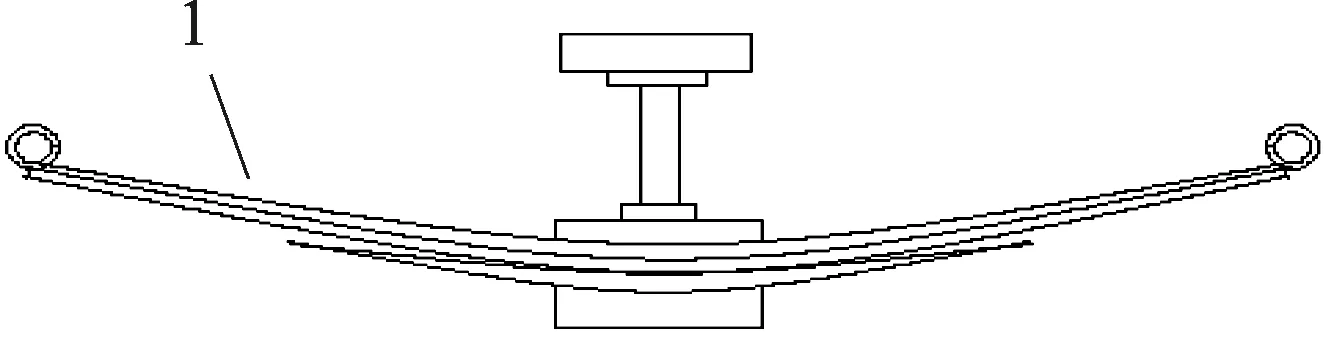
圖4 汽車鋼板彈簧結(jié)構(gòu)示意圖
2.2 STM8單片機(jī)硬件系統(tǒng)設(shè)計(jì)
為了方便對(duì)每個(gè)鋼板彈簧的A/D采樣值進(jìn)行濾波預(yù)處理,并提高系統(tǒng)的靈活性,采用分布式采集系統(tǒng),一個(gè)單片機(jī)負(fù)責(zé)一個(gè)鋼板彈簧的形變量采集。采集系統(tǒng)以價(jià)格低廉、功耗低的STM8單片機(jī)為控制核心。
采用HX711芯片作為模數(shù)轉(zhuǎn)換器,該芯片為24位高精度A/D轉(zhuǎn)換芯片,內(nèi)部實(shí)現(xiàn)低噪聲放大器,能同步抑制50~60 Hz 的電源干擾,通過片內(nèi)穩(wěn)壓電路可直接向外部傳感器和芯片內(nèi)A/D 轉(zhuǎn)換器提供電源[10]。芯片采用I2C的方式與單片機(jī)相連接,使用E+、E-作為外部傳感器供電接口,使用A+、A-作為A/D采集接口,芯片外接電路如圖5所示。
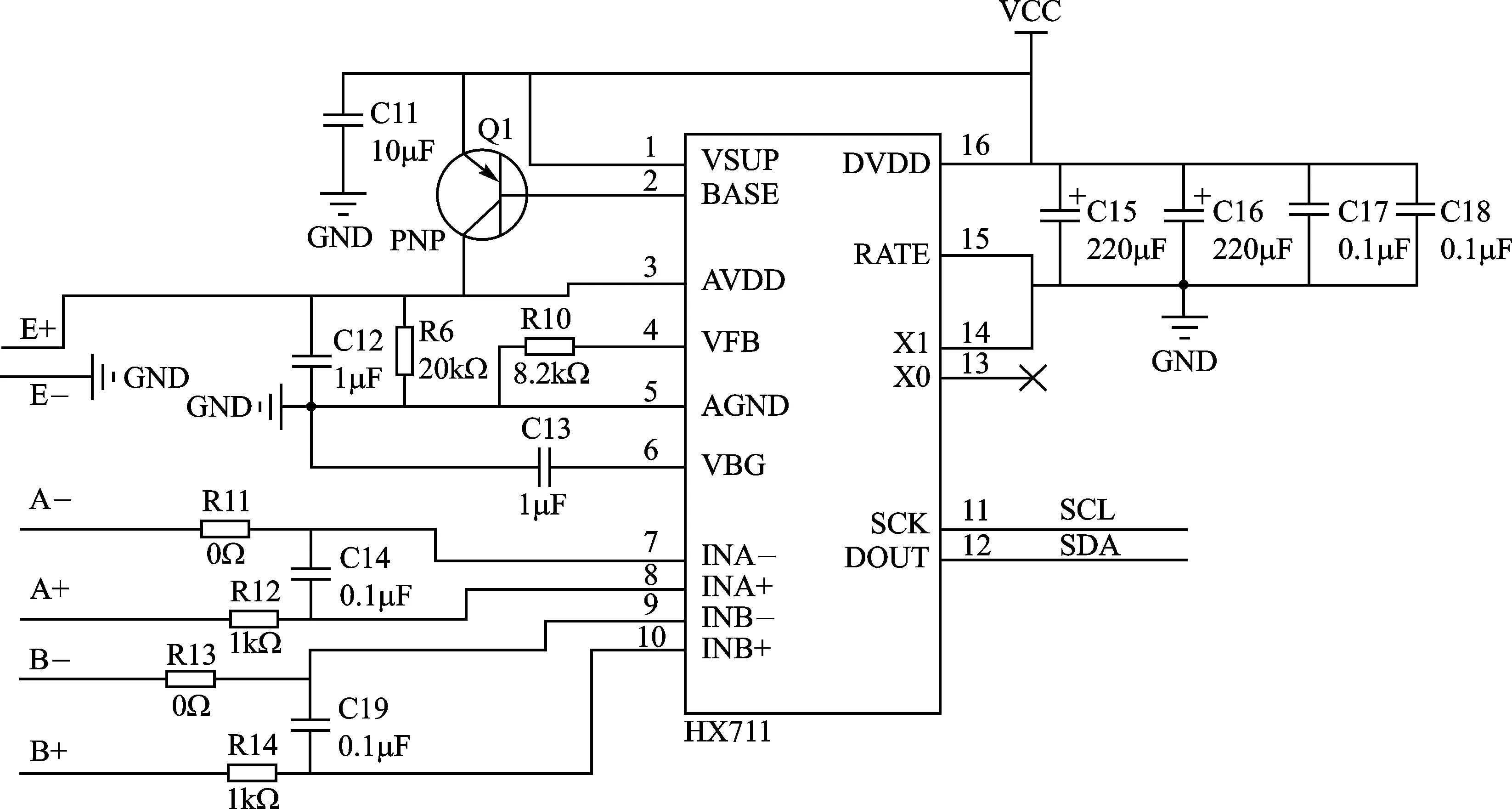
圖5 HX711電路連接圖
系統(tǒng)采用RS485接口組成半雙工網(wǎng)絡(luò)。系統(tǒng)接線圖如圖6所示,其中R為匹配電阻。
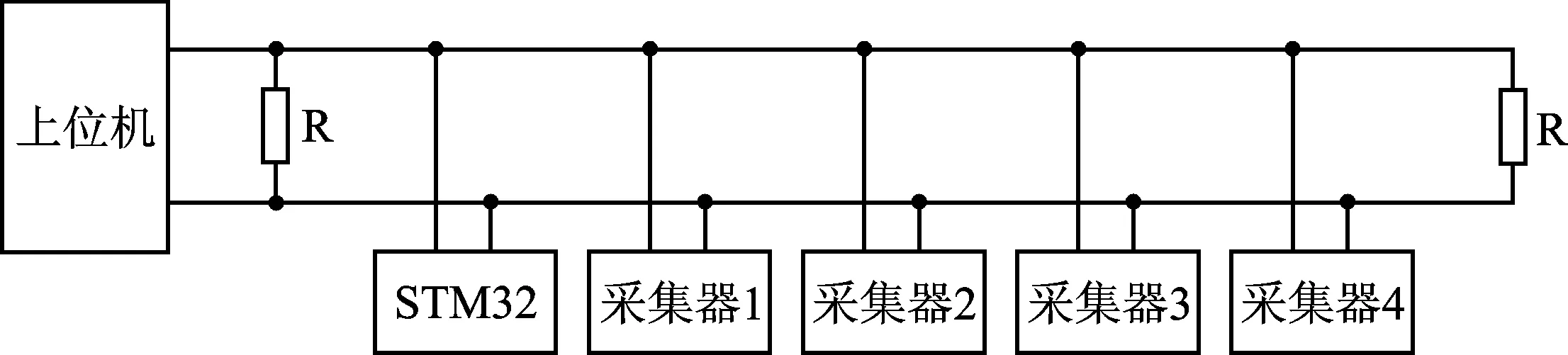
圖6 系統(tǒng)網(wǎng)絡(luò)連接圖
3 通信方案
3.1 RS485的時(shí)分復(fù)用方案
時(shí)分復(fù)用(TDM)是采用同一物理連接的不同時(shí)段來傳輸不同的信號(hào),也能達(dá)到多路傳輸?shù)哪康腫11]。系統(tǒng)借用TDM的思想,對(duì)RS485的上行鏈路進(jìn)行時(shí)分控制,通信開始之前,主機(jī)設(shè)定一個(gè)通信周期T,在通信周期T內(nèi)設(shè)定若干時(shí)間節(jié)點(diǎn)Tn,每個(gè)從機(jī)有一個(gè)不同的時(shí)間節(jié)點(diǎn),從機(jī)只有在自己的時(shí)間節(jié)點(diǎn)到來時(shí)才能發(fā)送數(shù)據(jù)。
設(shè)計(jì)只定義允許發(fā)送的時(shí)間節(jié)點(diǎn)Tn,不定義結(jié)束的時(shí)間,并且只允許從機(jī)在Tn到來時(shí)開始發(fā)送數(shù)據(jù),這就要求每個(gè)時(shí)間節(jié)點(diǎn)間留有足夠的時(shí)間間隔,既可以保證在該時(shí)間間隔內(nèi)能完成一次通信,也能避免因?yàn)榈退賳纹瑱C(jī)時(shí)間同步誤差帶來的通信沖突。這種方法比較適用于通信規(guī)模小、實(shí)時(shí)性要求低的組網(wǎng)中。時(shí)間節(jié)點(diǎn)法分時(shí)通信規(guī)則見圖7。
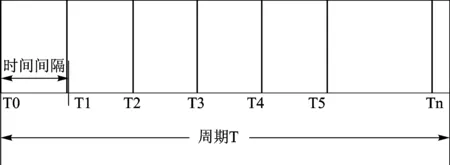
圖7 分時(shí)傳輸描述圖
圖中,T0到Tn為時(shí)間節(jié)點(diǎn),表示一個(gè)時(shí)刻相鄰兩個(gè)時(shí)間節(jié)點(diǎn)間為一時(shí)間間隔,所有時(shí)間間隔之和為一個(gè)通信周期T。
3.2 RS485時(shí)間同步程序設(shè)計(jì)
分時(shí)傳輸?shù)那疤崾菍?duì)各通信機(jī)進(jìn)行時(shí)間同步,在通信之前,需要進(jìn)行時(shí)間同步,具體實(shí)現(xiàn)步驟如下:
時(shí)間同步由主機(jī)發(fā)起,在多機(jī)通信之前,主機(jī)確定通信周期T和時(shí)間間隔Ti,并指定通信間隔系數(shù)n,之后主機(jī)通過廣播將這些數(shù)據(jù)發(fā)送給所有從機(jī)。各從機(jī)收到該時(shí)間同步數(shù)據(jù)幀后,便立即讀取時(shí)間同步的參數(shù),響應(yīng)時(shí)間同步,并且計(jì)算自己允許發(fā)送數(shù)據(jù)的時(shí)間節(jié)點(diǎn)Tn,Tn計(jì)算公式如下,其中m為該從機(jī)的本地MAC地址號(hào)。
(1)
參數(shù)獲取并計(jì)算完畢后,單片機(jī)立即啟動(dòng)μs定時(shí)器,定時(shí)周期為T,本機(jī)允許發(fā)送的時(shí)間節(jié)點(diǎn)為Tn。當(dāng)自己的時(shí)間節(jié)點(diǎn)Tn到來時(shí),從機(jī)允許發(fā)送數(shù)據(jù)。從機(jī)響應(yīng)時(shí)間同流程圖如圖8所示。
3.3 通信協(xié)議
3.3.1 數(shù)據(jù)幀格式定義
數(shù)據(jù)幀由幀頭、幀尾、源地址與源地址、功能選項(xiàng)以及承載功能選項(xiàng)具體細(xì)節(jié)的功能單元組成。數(shù)據(jù)幀格式的具體信息如表1所列。

表1 數(shù)據(jù)幀格式定義
本設(shè)計(jì)中MAC地址域?yàn)?~16,0表示主機(jī)地址,16表示廣播地址。功能選項(xiàng)的具體內(nèi)容如表2所列。
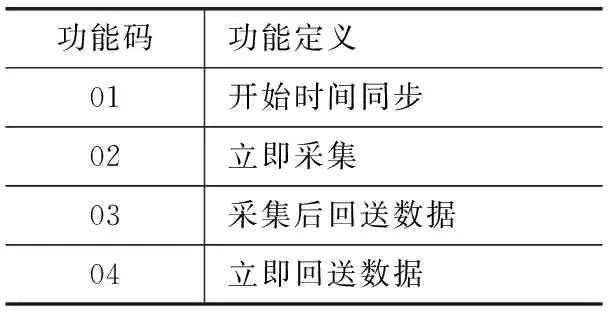
表2 功能選項(xiàng)
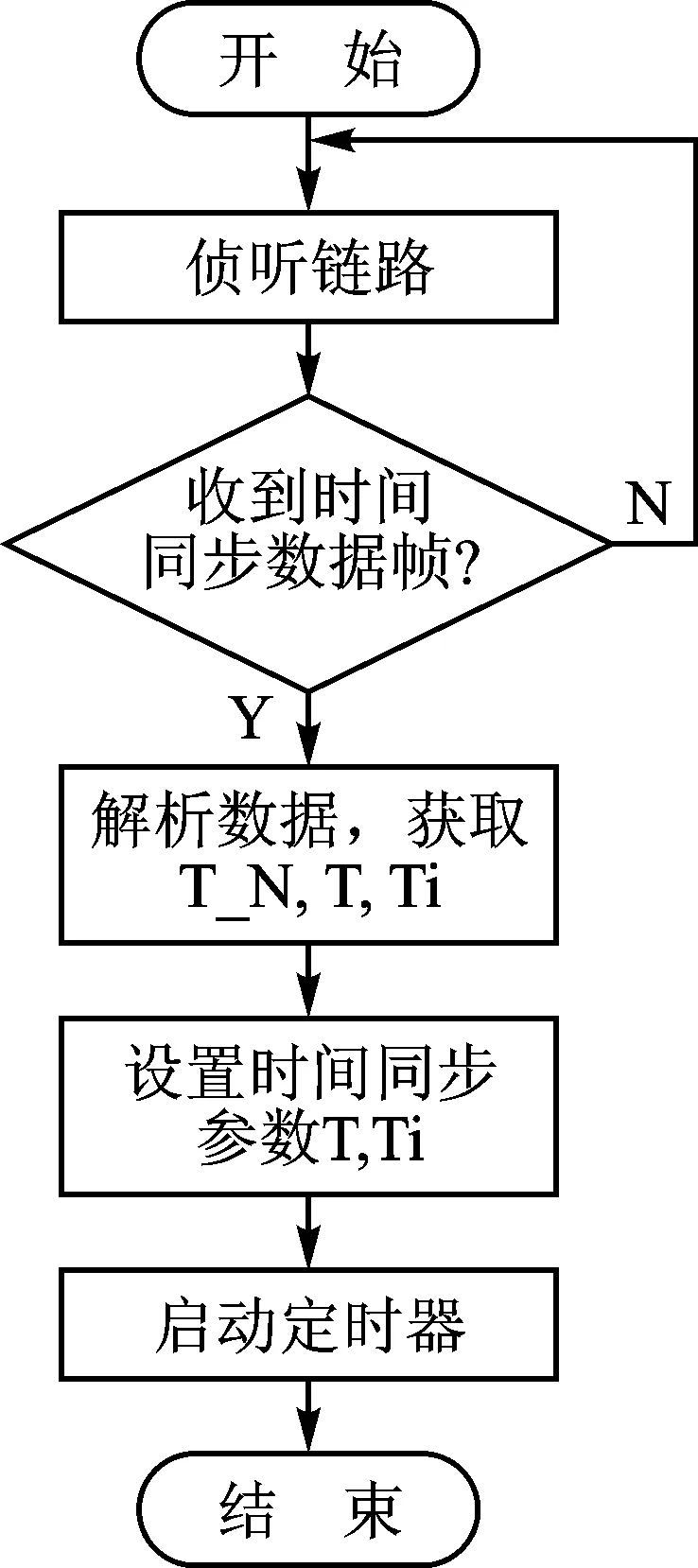
圖8 從機(jī)響應(yīng)時(shí)間同步流程圖
功能碼01只能通過廣播發(fā)送,用于時(shí)間同步。通信系統(tǒng)在時(shí)間同步后才能運(yùn)行。當(dāng)功能碼為01時(shí),功能單元承載時(shí)間周期T和時(shí)間節(jié)點(diǎn)間隔系數(shù)Ti,等待且在時(shí)間同步完成后,從機(jī)將在自己的時(shí)間節(jié)點(diǎn)上回送一個(gè)同步完成的數(shù)據(jù)幀。功能碼為02時(shí),表示立即采集并轉(zhuǎn)換A/D數(shù)據(jù)。功能碼為03時(shí),采集器采集并轉(zhuǎn)換數(shù)據(jù),并且需要數(shù)據(jù)的回送,數(shù)據(jù)回送過程的沖突避免見第4.1節(jié)。功能碼04用于單播輪詢的時(shí)候。
3.3.2 通信程序設(shè)計(jì)
當(dāng)主機(jī)程序需要獲取從機(jī)的采集數(shù)據(jù)時(shí),可能出現(xiàn)通信線路或是從機(jī)未響應(yīng)等情況導(dǎo)致的數(shù)據(jù)獲取失敗問題。為了解決該問題,主機(jī)采用循環(huán)發(fā)送的方式,直到收到所有預(yù)定從機(jī)的數(shù)據(jù),這種方式適用于功能碼為01、03和04這些有返回值的數(shù)據(jù)幀發(fā)送情況,當(dāng)經(jīng)過一定次數(shù)的發(fā)送仍然不能收到回送結(jié)果,則報(bào)告出錯(cuò)。當(dāng)然,必須得保證每次發(fā)送數(shù)據(jù)的時(shí)間間隔足夠長(zhǎng)。
當(dāng)多機(jī)同時(shí)進(jìn)行通信時(shí),從機(jī)的數(shù)據(jù)發(fā)送必須嚴(yán)格按照第3.1節(jié)中的通信規(guī)則。該規(guī)則的實(shí)現(xiàn)主要使用單片機(jī)的定時(shí)器來完成,當(dāng)單片機(jī)收到時(shí)間同步數(shù)據(jù)后便修改定時(shí)參數(shù)T和Tn,并啟動(dòng)定時(shí)器。定時(shí)器中斷觸發(fā)時(shí)間為10 μs,使用軟件的方式進(jìn)行一個(gè)周期T的定時(shí),即引入變量t,每次定時(shí)中斷后t自加,t每加1相當(dāng)于經(jīng)過10個(gè)μs,通過判斷t的大小來判斷時(shí)間是否到達(dá)Tn,以及定時(shí)是否滿一個(gè)周期。用T_FLAG來表示發(fā)送允許位,單片機(jī)需要發(fā)送數(shù)據(jù)時(shí)需要檢測(cè)T_FLAG狀態(tài)。從機(jī)數(shù)據(jù)發(fā)送流程見圖9。
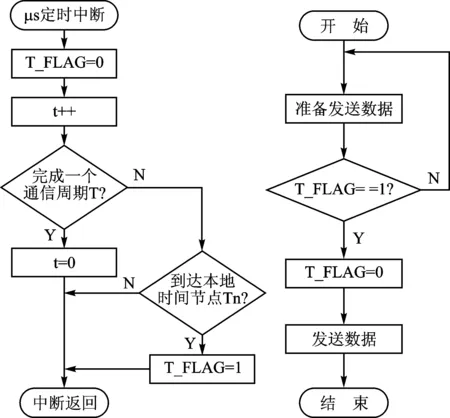
圖9 從機(jī)發(fā)送數(shù)據(jù)流程圖
4 采集器程序設(shè)計(jì)
4.1 A/D采集控制程序
HX711初始化后,將數(shù)據(jù)線和用于控制數(shù)據(jù)接收的CLK信號(hào)電平拉低以保證數(shù)據(jù)正確接收,然后轉(zhuǎn)換數(shù)據(jù)。數(shù)據(jù)的接收由CLK控制,在數(shù)據(jù)和CLK被主動(dòng)拉低之后,每發(fā)送一次CLK的高電平信號(hào),便讀取1次DOUT位數(shù)據(jù),當(dāng)收到24個(gè)DOUT電平后,開始轉(zhuǎn)換數(shù)據(jù),這樣電壓增益為128。之后將轉(zhuǎn)換后的數(shù)據(jù)返回,完成A/D的這一次采集工作,繼續(xù)等待下次單片機(jī)的調(diào)用。
4.2 采集器主程序
STM8單片機(jī)作為通信系統(tǒng)的從機(jī),一直監(jiān)聽鏈路等待主機(jī)的命令,STM8單片機(jī)正確收到主機(jī)發(fā)來的數(shù)據(jù)后,通過查閱數(shù)據(jù)幀中的功能選項(xiàng)判斷主機(jī)的意圖,具體功能選項(xiàng)見表2。根據(jù)功能選項(xiàng)調(diào)用相應(yīng)的子程序進(jìn)行處理,程序主流程如圖10所示。
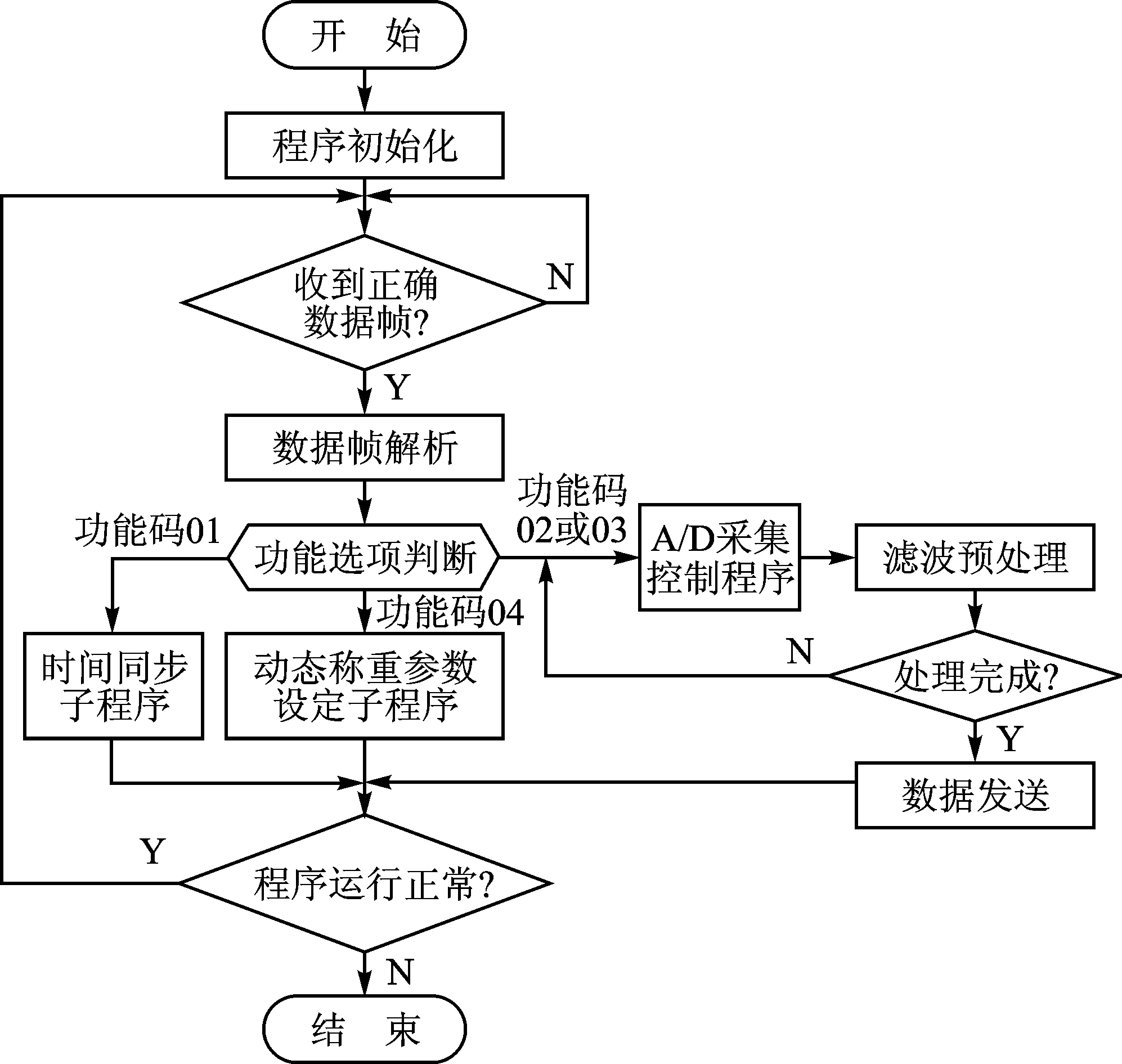
圖10 采集器主程序流程圖
5 測(cè)試及實(shí)驗(yàn)結(jié)果
通過對(duì)貨車模型進(jìn)行等重加載實(shí)驗(yàn)來測(cè)試同步采集器,測(cè)試主機(jī)使用PC機(jī),PC機(jī)端使用本次設(shè)計(jì)的通信協(xié)議的上位機(jī)程序。
測(cè)試過程進(jìn)行了180次連續(xù)加重,每次加重后由PC發(fā)起采集命令,之后PC記錄各采集器傳來的A/D轉(zhuǎn)換數(shù)據(jù)。測(cè)試完成后將各采集的數(shù)據(jù)進(jìn)行曲線繪制,繪制結(jié)果如圖11所示。圖表橫坐標(biāo)為載荷值,縱坐標(biāo)為PC機(jī)收到的采集器處理后的A/D轉(zhuǎn)換值。
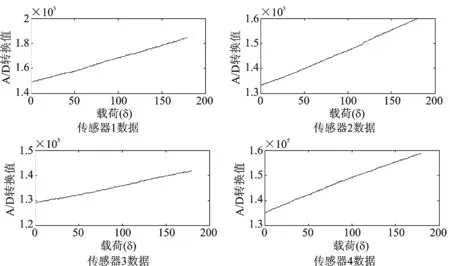
圖11 數(shù)據(jù)結(jié)果曲線圖
由上圖可以看出,4個(gè)采集器傳來的數(shù)據(jù)均在曲線附近,并且?guī)缀醭删€性,這與應(yīng)變式傳感器的物理特性[12]基本一致。每次測(cè)試都完整收到4個(gè)從機(jī)的數(shù)據(jù),曲線沒有出現(xiàn)大的跳變,說明測(cè)試過程中通信系統(tǒng)是穩(wěn)定的,同步采集任務(wù)成功。
結(jié) 語

參考文獻(xiàn)
[1] 王靜.加強(qiáng)大型貨運(yùn)車輛安全管理和治理的探究[J].發(fā)展,2017(6):85-86.
[2] 樊麗輝.車輛動(dòng)態(tài)稱重技術(shù)[J].公路與汽運(yùn),1998(2):5-7.
[3] 張雨,袁明新,吳文兵.車輛動(dòng)態(tài)稱重儀使用現(xiàn)狀及其軸重信號(hào)分析[J].交通科學(xué)與工程, 2003, 19(1):16.
[4] 李惠敏,李曉林.關(guān)于車載動(dòng)態(tài)稱重算法研究[J].計(jì)算機(jī)仿真,2016(11):140-143.
[5] 王望予.汽車設(shè)計(jì)[M].北京:機(jī)械工業(yè)出版社,2004.
[6] 陳道炯,高上忠,高志峰.車載動(dòng)態(tài)稱重系統(tǒng)的研究[J].汽車技術(shù),2008(6):8-12.
[7] 楊飛,陳廣華,馬應(yīng)林.基于粘貼式應(yīng)變稱重傳感器的設(shè)計(jì)[J].機(jī)械與電子, 2010(2):13-16.
[8] 劉九卿.應(yīng)變式稱重傳感器的電路補(bǔ)償與調(diào)整[J].衡器,1996(3):5-10.
[9] 苗麗霞.淺析惠斯登電橋在稱重傳感器中的應(yīng)用[J].甘肅冶金,2004,26(4):52-54.
[10] 海芯科技.電子秤專用模擬/數(shù)字(A/D)轉(zhuǎn)換器芯片[EB/OL].[2018-02].http://pdf-file.ic37.com/uploadpdf_old/icpdf_datasheet_8/HX711_datasheet_897860/146099/HX711_datasheet.pdf .
[11] 毛小波,庹先國(guó), 蔣鑫,等.RS485總線時(shí)分復(fù)用實(shí)現(xiàn)地震數(shù)據(jù)并行同步采集[J].中國(guó)測(cè)試,2015,41(4):102-105.
[12] 王云章.電阻應(yīng)變式傳感器應(yīng)用技術(shù)[M].北京:中國(guó)計(jì)量出版社, 1991.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
電子制作(2019年13期)2020-01-14 03:15:28
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
電子制作(2018年12期)2018-08-01 00:48:04
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45