Mirosot機(jī)器人帶球避障研究
2018-05-15 08:31:14孫紹華王魁生雷娜
軟件導(dǎo)刊 2018年4期
孫紹華 王魁生 雷娜
摘 要:Mirosot機(jī)器人避障路徑規(guī)劃在不考慮球體運(yùn)動(dòng)的情況下,大多采用蟻群算法、神經(jīng)網(wǎng)絡(luò)算法以及策略配合等方法。Mirosot機(jī)器人在帶球避障過程中應(yīng)同時(shí)考慮球體受力和初始角度兩個(gè)限制條件。在考慮球體運(yùn)動(dòng)的情況下,采用物理運(yùn)動(dòng)學(xué)受力分析方法建立球體受力運(yùn)動(dòng)路徑軌跡方程,以解決機(jī)器人帶球避障路徑規(guī)劃問題。
關(guān)鍵詞:Mirosot;避障運(yùn)動(dòng);路徑規(guī)劃;機(jī)器人足球
DOIDOI:10.11907/rjdk.172616
中圖分類號(hào):TP301
文獻(xiàn)標(biāo)識(shí)碼:A 文章編號(hào):1672-7800(2018)004-0016-03
Abstract:The problem of a path planning of Mirosot robot avoiding obstacle, without considering the ball movement, most of the use of ant colony algorithm, neural network algorithm and methods of strategy cooperation,etc.to realize the path planning of robot obstacle avoidance.The purpose of this paper is to solve the problem of a path planning of Mirosot robot avoiding obstacle considering the ball movement.In this paper, the physical kinematic force analysis method is used to analyze and solve the problem, and the trajectory equation of the moving path of the ball is established.The results show that the Mirosot robot has two limiting conditions for ball force and initial angle selection in the process of avoiding obstacle with ball.It is concluded that the two constraints of the ball force and the initial angle should be taken into account in the process of a path planning of robot avoiding obstacle with ball.
It is common to apply ant colony optimization, neural network algorithm and strategy matching to avoid obstructions with the ball in Mirosot robot path planning. The two constraint conditions of sphere stress and initial angle should be considered in Microsot robot's path planning. This paper adopts the physical kinematic force analysis to establish the trajectory equation of the sphere movement path, which helps to solve the robot path planning avoiding obstructions with the ball.
Key Words:Mirosot; obstacle avoidance; path planning; robot soccer
0 引言
Mirosot機(jī)器人足球比賽中,如何高效地對(duì)球體進(jìn)行控制進(jìn)而避開防守隊(duì)員帶球射門,是決定比賽結(jié)果的關(guān)鍵因素。如何提升機(jī)器人避障控球效率研究較多,主要包括以博弈論[1-3]、模糊理論[4]、神經(jīng)網(wǎng)絡(luò)以及蟻群算法等為代表的從策略角度進(jìn)行的分析,文獻(xiàn)[5]從策略選擇的角度對(duì)以上研究進(jìn)行了對(duì)比;以機(jī)器人協(xié)同合作[6-8]為代表的多機(jī)器人協(xié)作配合策略;以運(yùn)動(dòng)路徑規(guī)劃、截球避障[9-14]為代表的機(jī)器人單兵作戰(zhàn)策略。以上機(jī)器人控球運(yùn)動(dòng)研究主要以機(jī)器人配合為主,往往忽視了球體的受力運(yùn)動(dòng)情況。
研究人員一般將機(jī)器人抽象為矩形而忽略其實(shí)際構(gòu)造,以文獻(xiàn)[10]為例,將機(jī)器人模擬為矩形,搭建運(yùn)動(dòng)學(xué)模型,設(shè)計(jì)模糊控制算法。首先,在實(shí)際比賽中機(jī)器人的外觀構(gòu)造會(huì)對(duì)控球運(yùn)動(dòng)產(chǎn)生很大的影響,所以遠(yuǎn)遠(yuǎn)無法滿足可以忽略的要求;其次,實(shí)際比賽過程中機(jī)器人避障往往需要帶球運(yùn)動(dòng),文獻(xiàn)中作者并未考慮球體運(yùn)動(dòng)軌跡,無法實(shí)現(xiàn)帶球避障。
綜合上述問題,本文研究了機(jī)器人外觀與球體之間的聯(lián)系,提出機(jī)器人帶球避障過程中存在球體受力和初始角度選擇兩個(gè)限制條件,并針對(duì)機(jī)器人帶球避障的限制條件擬合路徑軌跡范圍圖。
1 實(shí)驗(yàn)條件
Mirosot半自主型機(jī)器人要求每個(gè)機(jī)器人尺寸不能超過7.5cm×7.5cm×7.5cm,見圖1。球體質(zhì)量為46g,直徑為42.7mm。比賽要求機(jī)器人抓球或持球不能超過球體體積的30%,見圖2。
在滿足上述比賽規(guī)則的基礎(chǔ)上,本研究基于以下假設(shè):①機(jī)器人和球體初始狀態(tài)靜止并保持緊密貼合;②場(chǎng)地摩擦力可忽略不計(jì),球體豎直方向上受力忽略不計(jì),僅進(jìn)行水平方向上的受力分析;③機(jī)器人球槽包含兩側(cè),本文僅進(jìn)行單側(cè)分析,另一側(cè)同理。
2 數(shù)據(jù)分析
2.1 機(jī)器人持球角度限制
球體直徑為42.7mm,機(jī)器人持球不超過球體30%,即球體與機(jī)器人接觸的實(shí)際深度不超過12.81mm。如圖3所示,機(jī)器人在單側(cè)球槽帶球時(shí),根據(jù)球體直徑以及機(jī)器人邊長(zhǎng)計(jì)算得出球體與機(jī)器人接觸的深度為11.14mm。也就是說,按照比賽規(guī)則設(shè)計(jì)的機(jī)器人在進(jìn)行帶球運(yùn)動(dòng)時(shí),無法實(shí)現(xiàn)機(jī)器人和球體接觸的極限深度12.81mm,即30%,機(jī)器人與球體接觸的實(shí)際最大深度為11.14mm,即26%,見圖4。
機(jī)器人在進(jìn)行帶球避障時(shí)受到力的作用,根據(jù)上述條件,計(jì)算得出受力角度δ的取值范圍為0≤δ≤1.072 2。
2.2 機(jī)器人持球受力限制
圖5中F1和F2分別表示球體受力的極限方向,球體受力避障的運(yùn)動(dòng)路徑軌跡不僅受角度δ限制,而且受到力F大小的影響。其中,力F的大小受機(jī)器人帶球運(yùn)動(dòng)加速度的限制,即機(jī)器人帶球運(yùn)動(dòng)加速度越大,球體受力F越大;反之,機(jī)器人帶球運(yùn)動(dòng)加速度越小,球體受力F越小。
2.3 球體受力分析
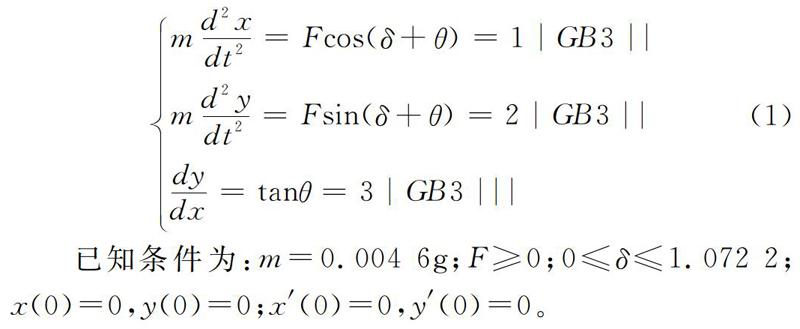
將上述條件精簡(jiǎn)后,如圖6所示,機(jī)器人在進(jìn)行曲線運(yùn)動(dòng)時(shí)為了與球體始終保持緊密貼合,需要沿球體運(yùn)動(dòng)方向的δ角施加力F。
式(1)表示x軸方向加速度與質(zhì)量的乘積等于x軸方向受力的大小;式(2)表示y軸方向加速度與質(zhì)量的乘積等于y軸方向受力的大小;式(3)表示曲線斜率。其中,角度θ表示機(jī)器人帶球轉(zhuǎn)向角,t為時(shí)間。
3 軌跡擬合
根據(jù)上述方程組可知,時(shí)間t為自變量,x,y為關(guān)于時(shí)間t的因變量,并且力F和角度δ人為取某一定值。
首先,取時(shí)間t為0-100s,角度θ為定值1.072 2,力F分別取1N(加號(hào)線)、10N(虛線)、20N(實(shí)線),進(jìn)行軌跡擬合,如圖7所示。
從圖7可以看出,在受力角度θ不變的情況下,隨著力F的不斷增大,機(jī)器人帶球運(yùn)動(dòng)的軌跡弧度和單位時(shí)間內(nèi)發(fā)生的位移都在不斷增大,但弧線趨于平緩。
其次,取時(shí)間t為0-100s,力F為定值20N,角度θ分別取0(加號(hào)線),0.15(虛線),1.072 2(實(shí)線)進(jìn)行軌跡擬合,圖像如圖8所示。
從圖8可以看出,在力F大小不變的情況下,隨著受力角度的不斷增大,機(jī)器人帶球進(jìn)行曲線運(yùn)動(dòng)的旋轉(zhuǎn)角度也在不斷增大,但是曲線趨于平緩。
4 結(jié)論
通過推理和計(jì)算得出以下幾點(diǎn)結(jié)論:
(1)角度限制:機(jī)器人帶球避障運(yùn)動(dòng)初始旋轉(zhuǎn)角度存在限制條件,即 0≤δ≤1.072 2。
(2)受力限制:機(jī)器人帶球避障運(yùn)動(dòng)時(shí),球體受力大小與機(jī)器人運(yùn)動(dòng)的加速度大小表現(xiàn)為正相關(guān),且機(jī)器人帶球避障過程中,若加速度不變則球體運(yùn)動(dòng)為弧度減小的弧線運(yùn)動(dòng),即為保證機(jī)器人帶球以某一特定弧度運(yùn)動(dòng)時(shí),機(jī)器人必須滿足加速度增大的加速運(yùn)動(dòng)。
(3)球體軌跡:機(jī)器人帶球進(jìn)行曲線運(yùn)動(dòng)存在力F以及受力夾角δ兩個(gè)限制因素。力F的大小影響機(jī)器人帶球運(yùn)動(dòng)單位時(shí)間內(nèi)所運(yùn)動(dòng)的位移和弧度大小,位移和弧度隨著力F的增大而增大。夾角δ影響機(jī)器人帶球運(yùn)動(dòng)的弧度大小,弧度隨著δ的增大而增大。利用物理運(yùn)動(dòng)學(xué)受力分析方法,提出機(jī)器人帶球避障路徑的軌跡方程。
5 結(jié)語
通過本文研究可以發(fā)現(xiàn),在Mirosot機(jī)器人足球比賽中,機(jī)器人帶球避障運(yùn)動(dòng)路徑研究不能忽略機(jī)器人的外形構(gòu)造及球體的運(yùn)動(dòng)路徑。在未來研究中通過加入本文考慮的球體運(yùn)動(dòng)角度以及受力的限制條件,可以有效改善機(jī)器人帶球避障過程中丟球情況的發(fā)生。
參考文獻(xiàn):
[1] 李柏依,劉釗,胡鎵偉.動(dòng)態(tài)環(huán)境下機(jī)器人博弈戰(zhàn)術(shù)自動(dòng)產(chǎn)生機(jī)制[J].計(jì)算機(jī)與數(shù)字工程,2015(6):1023-1028.
[2] 黎波,李磊民.博弈論的足球機(jī)器人進(jìn)攻策略研究[J].計(jì)算機(jī)工程與應(yīng)用,2011,47(30):224-226.
[3] MARTINOVIC J. Robot soccer-strategy description[EB/OL].http:∥www.doc88.com/p-9913174226366.html
[4] MEHTA S. A multiple level MIMO FL based intelligence for multi agent robot system[EB/OL]. http:∥ipasj.org/IIJIT/Volume4 Issue4/IIJIT-2016-04-05-1.pdf
[5] WU J.Analysis of strategy in robot soccer game[J]. Neurocomputing,2013(109):66-75.
[6] 韓家新,劉彥伯,張旭華,等.改進(jìn)的足球機(jī)器人直沖射門算法[J].計(jì)算機(jī)工程與設(shè)計(jì),2013,34(11):4077-4080.
[7] PRATOMO A H. Multiple robots coordination and shooting strategy in robotic soccer game[M]. Next Wave in Robotics,Springer Berlin Heidelberg, 2011:280-289.
[8] LEE D H, NA K I, KIM J H. Task and role selection strategy for multi-robot cooperation in robot soccer[C].Trends in Intelligent Robotics, Fira Robot World Congress, Fira 2010, Bangalore, India, September 15-17, 2010. Proceedings. DBLP, 2010:170-177.
[9] 王發(fā)智.一種改進(jìn)算法在機(jī)器人足球截球動(dòng)作中的應(yīng)用[J].計(jì)算機(jī)仿真,2014,31(4):352-354.
[10] 楊小菊,張偉,高宏偉,等.基于模糊神經(jīng)網(wǎng)絡(luò)的移動(dòng)機(jī)器人避障研究[J].電子世界,2016(21):189-191.
[11] LAI L C. Parameter estimation of potential field method with fuzzy control for motion planning of soccer robot[M]. Next Wave in Robotics. Springer Berlin Heidelberg, 2011:186-192.
[12] REYES N H, BARCZAK A L C, SUSNJAK T. A reconfigurable hybrid intelligent system for robot navigation[EB/OL]. http:∥onlinelibrary.wiley.com/doi/10.1002/rob.20109/abstract.
[13] JAMESON J. Error analysis in applying fuzzy logic based obstacle avoidance algorithm for robot soccer[M]. FIRA RoboWorld Congress. Springer Berlin Heidelberg, 2013.
[14] LEE D H, NA K I. Task and role selection strategy for multi-robot cooperation in robot soccer[M]. FIRA RoboWorld Congress. Springer Berlin Heidelberg, 2010.
(責(zé)任編輯:杜能鋼)
