基于SolidWorks的電動儲錢罐設計及運動仿真
2018-05-14 14:49:45姜川董岑華劉凡
工業設計 2018年1期
姜川 董岑華 劉凡
摘要:運用SolidWorks的建模技術,完成了電動儲錢罐的虛擬設計,并利用SolidWorks motion插件對電動儲錢罐的盒蓋開關及硬幣鉤取進行運動仿真,完成所設計機構的干涉檢查和運動分析,為簡單機械產品的設計與分析提供了解決問題的思路。實踐證明,這種方法可有效提高效率,具有良好應用前景。
關鍵詞:電動儲錢罐;SolidWorks;虛擬設計;曲柄搖桿;運動仿真
儲錢罐是結構簡單的生活用品,而電動儲錢罐利用擺動凸輪機構和曲柄搖桿機構實現對硬幣的抓取和存儲,增加了技術性、趣味性、智能性。本文采用三維虛擬設計,同時以動力學為基礎,借助CAE技術及相關軟件,進行產品的運動仿真、虛擬樣機裝配等。在樣機試制前可以通過仿真分析進行驗證和優化,確保結構設計的正確性,有效提高設計效率,降低設計成本,提高設計質量。
1方案設計
1.1設計思路
SolidWorks提供了自上而下和自下而上兩種設計方法。本文采用自上而下的設計方法,它具有符合產品開發流程、全局性強、效率高等特點。儲錢罐由直流減速電機驅動,將硬幣放于盒體指定位置時,觸發壓力傳感器接通電路,機構開始工作:盒蓋開啟,鉤子伸出將硬幣鉤入盒中,盒蓋關閉。運行一個周期后電路自動斷開。再次放置硬幣,重復上述過程。
因此,存錢罐的執行機構主要完成兩個動作:一是鉤取硬幣,二是打開和關閉盒蓋,本設計前者選用曲柄搖桿完成,后者則由凸輪機構完成。根據盒體的尺寸和伸出長度,設計合理的曲柄搖桿曲線。用8字形曲線可完成鉤取的動作。開關盒蓋采用凸輪機構,根據曲柄搖桿的運動規律設計凸輪,包括凸輪種類、行程、基圓半徑等。觀察凸輪的運動規律,保證兩個機構在時間上同步運動。在兩個機構間利用齒輪進行傳動。最后校核相關參數,對方案進行優化。
1.2設計條件和相關設計參數
儲錢罐由直流減速電機驅動,電機轉速為10RPM,一個工作周期為6s。
盒體尺寸:長120mm寬90mm高80mm。
盒蓋抬起約30mm,保證鉤子的正常伸出。鉤子伸出水平長度要大于25mm,保證能夠將硬幣鉤入盒子。
第五套人民幣:1元硬幣直徑25mm;5角硬幣直徑20.5mm;1角硬幣直徑19mm。
2結構設計
2.1曲柄搖桿機構
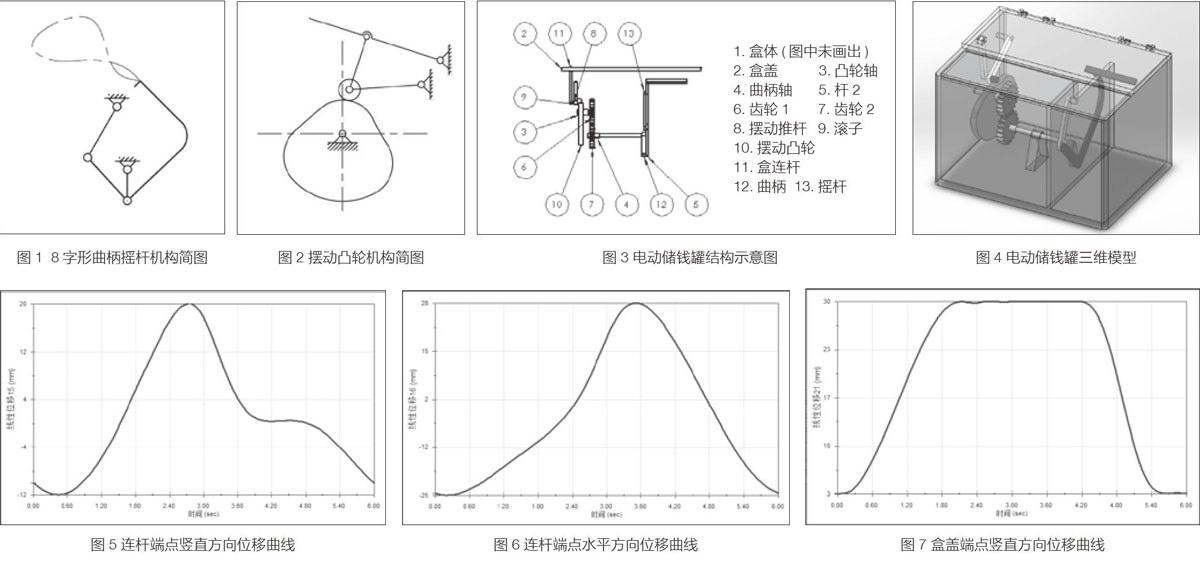
8字形曲柄搖桿機構曲柄安置在盒內,伸出的連桿末端做8字運動,有一段近水平的直線運動,可以完成對硬幣的鉤取,而且在完成抓取任務后能夠收回盒內,能較好地實現該功能。各桿的長度、安裝位置以及連桿曲線都需要反復調試。機構運動簡圖如圖1所示。
按預定8字形軌跡,上升時連桿末端伸出盒子,再做近水平運動,然后下降收回盒中。用試驗法設計四桿機構,利用SolidWorks中的Motion分析跟蹤連桿伸出末端位置曲線,經過反復修改各桿的長度及安裝位置。最終確定曲柄搖桿機構的參數。
曲柄長16mm,搖桿和連桿均長30mm,連桿伸出部分與連桿垂直。搖桿回轉中心距盒體前壁45mm,距盒底20mm,搖桿回轉中心距盒體前壁40mm,距盒底55mm。
2.2擺動凸輪機構
擺動凸輪機構能夠實現通過桿的擺動來升高一定高度,而不是豎直運動,這更符合頂蓋的運動規律,而且擺動推桿對壓力角的要求較小。由于擺動推桿不直接與頂蓋固連,所以需要增加一個與頂蓋相連的連桿,來實現用擺動桿的運動帶動盒蓋運動。機構簡圖如圖2所示。
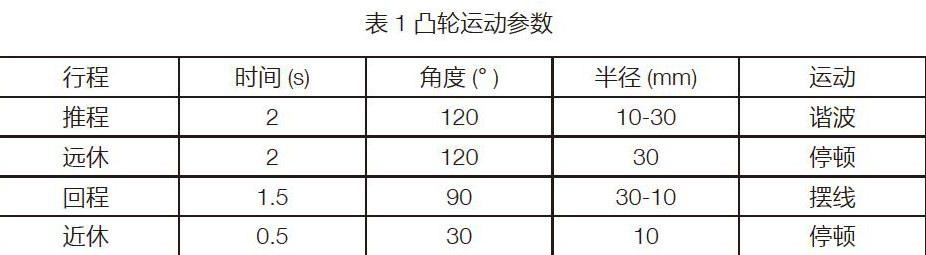
根據曲柄連桿的運動規律可設計凸輪的相關尺寸。凸輪基圓半徑為10mm。凸輪軸心距盒底40mm,距盒體前壁45mm。凸輪運動參數見表1。
2.3傳動機構
曲柄搖桿機構和凸輪機構分別安裝相向的兩側面,兩機構的輸入軸平行,且運動周期相同,因此選用傳動比為1:1的直齒輪實現兩機構運動的傳遞,具體數值的選擇應根據兩個機構軸線距離而定。
其余的零件設計采用直接建模和關聯設計兩種方式,結構圖見圖3。
3部件和總體裝配
3.1三維建模
儲錢罐模型的建立是仿真和分析的前提。根據結構層次以及零部件的約束、自由度和相對運動關系,將儲錢罐分為曲柄搖桿機構、凸輪擺桿機構、傳動系統、盒體及盒蓋4大部分。利用SolidWorks 2016進行各部分零件的三維建模。
3.2虛擬裝配
首先根據零件間約束及運動關系建立好各個部分的裝配體,再將4部分裝配成虛擬樣機。三維模型如圖4所示。
干涉檢查的任務是發現裝配體中靜態零部件之間的干涉。干涉的存在影響了零部件之間的運動關系,是建模中常見錯誤之一。本產品檢查后未發現干涉。
4運動仿真及分析
虛擬設計完成之后,可以利用電動儲錢罐的三維實體模型和SolidWorks Motion插件進行運動分析。
通過8字曲線我們了解了伸出連桿的運動路徑,接著需要對它進行運動分析,主要是其在豎直方向和水平方向的線位移。根據曲柄搖桿的水平方向線位移我們能判斷伸出長度是否合適。根據曲柄搖桿的豎直方向線位移規律我們才能設計凸輪機構。由于此機構6秒為一周期,運動較為緩慢,所以對于速度和加速度沒有太多要求,在此不予討論。
利用SolidWorks中的Motion分析來計算伸出部分端點在豎直方向和水平方向上的位移。結果如圖5、圖6。
連桿端點在水平方向能夠伸出盒子28mm,能夠做到將直徑最大的1元硬幣鉤進盒中,滿足設計要求。豎直方向上可以看到在6秒的工作周期中,經過2秒鐘的時間上升到最高點,高度為20mm,然后下降,在3.5秒左右進行近水平運動,在4.8秒左右下降,完成一個運動周期。
利用Motion分析來計算盒蓋端點在豎直方向上的位移。結果見圖7。盒蓋在2秒時上升至最高點30mm,4.2s時開始下降,再經過約1.5秒后回到開始位置。可見在豎直方向的運動過程中,曲柄搖桿不會與盒蓋發生干涉。與預期設計的運動規律相同。 以上運動均以盒體中硬幣板的端點為原點。5結論 本文對電動儲錢罐進行方案設計和結構設計,運用SolidWorks等計算機軟件對其進行虛擬設計和運動仿真,驗證機構裝配的合理性,通過分析連桿端點和盒蓋端點的位移曲線,驗證機構運動的兼容性,為簡單機械產品的設計與分析提供了解決問題的思路。實踐證明,本文采用的設計方法有效可行且設計周期短,較傳統設計更為便捷有趣,在機械系統的設計中具有良好的應用前景。
參考文獻
[1]陳超祥,葉修辭.SolidWorks高級教程簡編[M].北京:機械工業出版社,2010
[2]孫恒,陳作模,葛文杰.機械原理(第八版)[M].北京:高等教育出版社,2013.5
[3]唐平,廖敏.基于SolidWorks的抓盤結構設計與分析[J].機械設計與制造,2012(06):53 54
[4]詹雋青,王文強,孟祥德,于永吉.基于SolidWorks的自行走裝置的設計[J].起重運輸機械,2011(08):49 50
[5]穆星宇.基于SolidWorks的結構分析與設計[J].工業設計,2016(01):83
[6]邵立,馬登哲,嚴雋琪,鐘廷修.虛擬制造中仿真技術的應用[J].工業工程與管理,2000(04):22 23
[7姜岳健.基于SolidWorks Motion運動仿真跟蹤路徑的應用[J].機械研究與應用,2014(2):187188
