基于BP神經(jīng)網(wǎng)絡(luò)模型的MEMS加速度計(jì)誤差補(bǔ)償方法
2018-05-14 15:33:29郭衛(wèi)楊鵬飛張武剛王巍
中國測試 2018年3期
郭衛(wèi) 楊鵬飛 張武剛 王巍


摘要:現(xiàn)階段普遍采用多元線性回歸對加速度計(jì)誤差建模.并利用最小二乘法對模型參數(shù)辨識,但其對加速度計(jì)精度提高有限,因此該文提出一種基于BP神經(jīng)網(wǎng)絡(luò)模型的MEMS加速度計(jì)誤差補(bǔ)償方法。該方法利用BP神經(jīng)網(wǎng)絡(luò)建立加速度計(jì)誤差模型,通過多位置翻滾進(jìn)行實(shí)驗(yàn)數(shù)據(jù)測量,并對模型進(jìn)行訓(xùn)練,最后利用訓(xùn)練好的模型對加速度計(jì)誤差進(jìn)行補(bǔ)償。比較多元線性回歸和BP神經(jīng)網(wǎng)絡(luò)建模對加速計(jì)誤差補(bǔ)償結(jié)果,其標(biāo)準(zhǔn)偏差分別為0.0019g和0.00016g。結(jié)果表明誤差下降一個(gè)數(shù)量級,說明BP神經(jīng)網(wǎng)絡(luò)能有效地補(bǔ)償加速度計(jì)誤差。
關(guān)鍵詞:加速度計(jì);BP神經(jīng)網(wǎng)絡(luò);多元線性回歸;誤差補(bǔ)償模型
0引言
微機(jī)電系統(tǒng)(micro-electro-mechanical systems,MEMs)慣性器件由于體積小,質(zhì)量輕,成本低,不受外界干擾,輸出頻率高及可靠性好等優(yōu)點(diǎn)被廣泛地應(yīng)用到各種場合。慣性測量單元(inertial measurementunit,IMU)是用來測量載體自身線加速度和角加速度的裝置,其測量精度與MEMS慣性器件的加工工藝及安裝精度有關(guān)。加速度計(jì)為IMI中的主要元件,因此需要研究其誤差補(bǔ)償方法來提高測量精度。
有關(guān)加速度計(jì)誤差補(bǔ)償,文獻(xiàn)分別采用6位置、10位置、12位置和24位置等多位置翻滾標(biāo)定法,根據(jù)確定位置的理論加速度和傳感器的測量值來解算傳感器標(biāo)定系數(shù)矩陣中的未知量。文獻(xiàn)[8]采用一種基于橢球擬合的方法對傳感器進(jìn)行誤差補(bǔ)償,但這種方法要想得到最佳橢球擬合,搜索最優(yōu)解的速度較慢,一般施加充分但非必要條件的橢球約束。文獻(xiàn)提出一種基于卡爾曼濾波初始對準(zhǔn)的標(biāo)定加速度計(jì)零偏和安裝誤差角的新方法,利用對準(zhǔn)階段的水平失準(zhǔn)角估值標(biāo)定和補(bǔ)償上一標(biāo)定階段殘余的加速度計(jì)誤差,但其精度依賴于對速度誤差的測量精度。上述方法都是以影響精度的因子為基礎(chǔ),采用線性回歸方法進(jìn)行建模,這種建模方法在解算傳感器標(biāo)定系數(shù)時(shí)都使用的是同一位置的平均值,因此不能充分反映加速度計(jì)的特性,而且在面對復(fù)雜的線性關(guān)系時(shí)顯得無能為力。近年來,神經(jīng)網(wǎng)絡(luò)的發(fā)展取得了很大的進(jìn)展,應(yīng)用的領(lǐng)域也非常廣泛,與多元線性回歸相比,神經(jīng)網(wǎng)絡(luò)在復(fù)雜函數(shù)上的擬合具有很好的表現(xiàn),在傳感器的性能補(bǔ)償方面也取得了顯著的成果。本文將BP神經(jīng)網(wǎng)絡(luò)技術(shù)應(yīng)用到加速度計(jì)補(bǔ)償模型的建立上,以實(shí)現(xiàn)對加速度計(jì)誤差補(bǔ)償,并取得了較好的成果。
1MEMS加速度計(jì)誤差補(bǔ)償原理及模型建立
1.1 MEMS加速度計(jì)誤差補(bǔ)償原理
MEMS加速度計(jì)的誤差補(bǔ)償是根據(jù)加速度計(jì)的輸入a與輸出A之間的差來建立補(bǔ)償模型,利用建立好的誤差補(bǔ)償模型對加速度計(jì)的輸出數(shù)據(jù)進(jìn)行補(bǔ)償,補(bǔ)償后的輸出結(jié)果為a。其補(bǔ)償原理如圖1所示。
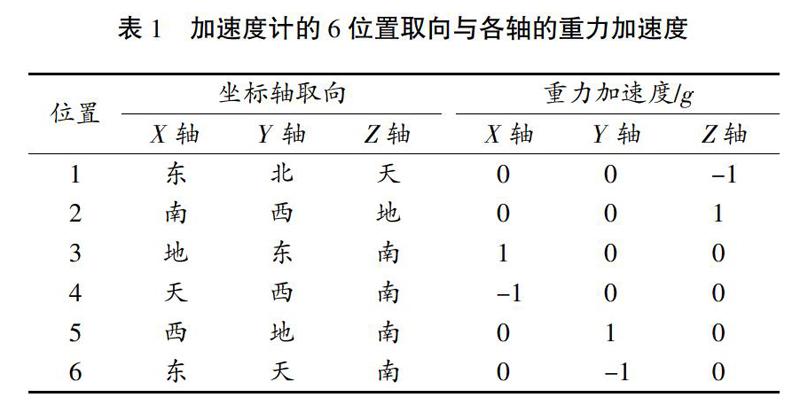
加速度計(jì)的主要測試方法有重力場靜態(tài)翻滾測試、離心機(jī)測試和線振動(dòng)測試等。由于重力加速度最容易獲得,并能精確測定其大小和方向,具有測試方便和結(jié)果精確的特點(diǎn),因此本文選擇重力場靜態(tài)翻滾測試法。通過選取6個(gè)不同的位置東北天、南西地、地東南、天西南、西地南、東天南來獲取實(shí)驗(yàn)數(shù)據(jù)。表1為MEMS加速度計(jì)的6位置取向以及在該位置下各軸的標(biāo)準(zhǔn)重力加速度。
1.2 MEMS加速度計(jì)誤差補(bǔ)償模型建立
1.2.1多元線性回歸
通過建立準(zhǔn)確的MEMS加速度計(jì)誤差模型能夠有效地補(bǔ)償相關(guān)的誤差以提高加速度計(jì)的測量精度。對MEMS加速度計(jì)的誤差形成原理進(jìn)行分析,總結(jié)產(chǎn)生誤差的主要來源有兩個(gè)方面,一方面是由于載體在線運(yùn)動(dòng)和角運(yùn)動(dòng)引起的各種干擾力矩,另一方面是由于質(zhì)性器件本身在設(shè)計(jì)、工藝加工不完善等內(nèi)部造成的干擾力矩。其主要類型有刻度因數(shù)誤差、零偏誤差、軸失準(zhǔn)角誤差,其中零偏誤差和刻度因數(shù)誤差對傳感器輸出誤差帶來的影響最大。由于制作工藝的原因,加速度計(jì)3個(gè)敏感軸并非完全正交而產(chǎn)生軸間非正交誤差,同時(shí)傳感器在安裝過程中也會(huì)帶來安裝角誤差,軸間非正交誤差和安裝角誤差作用效果相似,可以統(tǒng)一規(guī)劃為安裝誤差。
根據(jù)補(bǔ)償原理與系數(shù)解算方式可得MEMS加速度計(jì)誤差模型方程為
鑒于本文目的是驗(yàn)證BP神經(jīng)網(wǎng)絡(luò)在MEMS加速度計(jì)誤差補(bǔ)償上的有效性研究,因此不考慮二次誤差對其精度的影響,則MEMS加速度計(jì)誤差模型變?yōu)?/p>
1.2.2 BP神經(jīng)網(wǎng)絡(luò)
通過BP神經(jīng)網(wǎng)絡(luò)建立MEMS加速度計(jì)的誤差補(bǔ)償模型,該方法把未知模型看成是一個(gè)黑匣子,將MEMS加速度計(jì)的測量值作為系統(tǒng)的輸入,將相應(yīng)位置的標(biāo)準(zhǔn)重力加速度作為輸出值,利用大量的樣本對BP神經(jīng)網(wǎng)絡(luò)進(jìn)行訓(xùn)練。最后利用訓(xùn)練得到的模型對未知數(shù)據(jù)進(jìn)行預(yù)測。
BP神經(jīng)網(wǎng)絡(luò)模型由輸入層、輸出層及隱藏層組成,隱藏層的個(gè)數(shù)以及神經(jīng)元數(shù)對BP神經(jīng)網(wǎng)絡(luò)訓(xùn)練速度和精度有很大的影響。根據(jù)本文的數(shù)據(jù)特點(diǎn)為三軸加速度計(jì),因此輸入層的神經(jīng)元數(shù)目為3,分別對應(yīng)加速度計(jì)的3個(gè)測量值x、y、z;輸出層的神經(jīng)元數(shù)也為3,分別對應(yīng)加速度計(jì)的3個(gè)標(biāo)準(zhǔn)值x'、y'、z;為了驗(yàn)證BP神經(jīng)網(wǎng)絡(luò)模型在MEMS加速計(jì)誤差補(bǔ)償上的可實(shí)施性,將隱藏層的個(gè)數(shù)設(shè)為1,神經(jīng)元的個(gè)數(shù)設(shè)為12。
2方法
2.1最小二乘法
根據(jù)樣本數(shù)據(jù)對多元線性回歸模型中參數(shù)的求解方法(最小二乘法和最大似然法等),本文采用的是最小二乘法。記樣本測量值y與使用估計(jì)回歸模型計(jì)算的估計(jì)值y之間的偏差(或稱擬合誤差、殘則(即最小二乘準(zhǔn)則)來確定待定參婁β0幣β1的方法稱為最小二乘法(least squares,Ls)。用公式表示,最小二乘法滿足如下最小二乘準(zhǔn)則:
在給定某組樣本數(shù)據(jù)的條件下,就可以求出未知的參數(shù)。
2.2 BP神經(jīng)網(wǎng)絡(luò)模型訓(xùn)練
BP神經(jīng)網(wǎng)絡(luò)模型的輸入層和輸出層分別對應(yīng)樣本數(shù)據(jù)中的輸入集和輸出集。在這兩層中間稱為隱藏層,其可為一層或多層。每個(gè)在一個(gè)特定層的神經(jīng)元都與下一層所有神經(jīng)元相連接。輸入層有i個(gè)神經(jīng)元,輸出層有i個(gè)神經(jīng)元,隱藏層有h個(gè)神經(jīng)元,輸入層第i個(gè)神經(jīng)元和隱藏層第h個(gè)神經(jīng)元之間的連接權(quán)值為‰,隱藏層第h個(gè)神經(jīng)元和輸入層第i個(gè)神經(jīng)元的連接權(quán)值為w,則隱藏層的第h個(gè)神經(jīng)元輸入表達(dá)式為
BP神經(jīng)網(wǎng)絡(luò)屬于有監(jiān)督學(xué)習(xí),因此在它的輸出層存在一個(gè)標(biāo)準(zhǔn)的期望輸出值。在訓(xùn)練開始前計(jì)算機(jī)隨機(jī)生成一組向量作為權(quán)值分配給各輸入分量,隨后由事先定義的決策函數(shù)根據(jù)輸入量計(jì)算得到輸出數(shù)據(jù),并根據(jù)輸出結(jié)果與真實(shí)數(shù)據(jù)之間的誤差反復(fù)修正權(quán)向量,直至模型輸出值與標(biāo)準(zhǔn)的誤差達(dá)到限值,最后使用訓(xùn)練好的模型對加速度計(jì)誤差進(jìn)行補(bǔ)償。其算法流程如圖2所示。
3實(shí)驗(yàn)驗(yàn)證
實(shí)驗(yàn)使用一款三軸一體的數(shù)字慣性測量產(chǎn)品來對本文中的誤差建模方法進(jìn)行驗(yàn)證。為了避免不必要的干擾因素存在,首先對實(shí)驗(yàn)的三維轉(zhuǎn)臺進(jìn)行垂直校準(zhǔn),將設(shè)備上電預(yù)熱5 min,保證信號平穩(wěn)輸出,然后根據(jù)文中所述的6個(gè)不同位置進(jìn)行實(shí)驗(yàn)數(shù)據(jù)的測量。為保證實(shí)驗(yàn)數(shù)據(jù)的有效性,對每個(gè)位置的實(shí)驗(yàn)數(shù)據(jù)測量時(shí)間達(dá)到10min。
3.1多元線性回歸預(yù)測結(jié)果
對每個(gè)位置的數(shù)據(jù)取平均,則MEMS加速度計(jì)的X、Y、Z軸的輸出結(jié)果如表2所示。
由于加速度計(jì)誤差模型為4項(xiàng)多項(xiàng)式,直接用代數(shù)運(yùn)算比較繁瑣,為了更方便地求出模型中的參數(shù),解算時(shí)需要對每個(gè)加速度計(jì)建立矩陣方程,建立X軸加速度計(jì)誤差模型的矩陣形式:
3.2BP神經(jīng)網(wǎng)絡(luò)預(yù)測結(jié)果
設(shè)置模型輸出值與標(biāo)準(zhǔn)的誤差限值為0.0001,循環(huán)次數(shù)限值為5000,利用實(shí)驗(yàn)數(shù)據(jù)對BP神經(jīng)網(wǎng)絡(luò)模型進(jìn)行訓(xùn)練,在1000次訓(xùn)練后精度趨于穩(wěn)定。取未經(jīng)訓(xùn)練的實(shí)驗(yàn)數(shù)據(jù),利用訓(xùn)練好的BP神經(jīng)網(wǎng)絡(luò)模型對加速度計(jì)誤差補(bǔ)償?shù)慕Y(jié)果如圖3所示。從圖中可以看出,通過BP神經(jīng)網(wǎng)絡(luò)對MEMS加速度計(jì)的預(yù)測輸出值在一個(gè)較小的范圍內(nèi)圍繞其期望輸出上下波動(dòng),表明采用BP神經(jīng)網(wǎng)絡(luò)對MEMS加速度計(jì)進(jìn)行誤差補(bǔ)償是可以實(shí)現(xiàn)的。
3.3實(shí)驗(yàn)結(jié)果對比分析
為了更好地比較兩種方法對MEMS加速度計(jì)標(biāo)定的效果,通過用加速度計(jì)測量的數(shù)據(jù)帶入到已建立好的兩個(gè)加速度計(jì)誤差模型中,求出補(bǔ)償后的數(shù)據(jù)并作圖,圖4~圖6分別為MEMS加速度計(jì)X、Y、Z軸的BP神經(jīng)網(wǎng)絡(luò)模型和多元線性回歸模型,以及期望輸出對加速度計(jì)誤差補(bǔ)償?shù)膶Ρ冉Y(jié)果。表3是對兩種模型補(bǔ)償結(jié)果均值和標(biāo)準(zhǔn)偏差的對比。
從圖4~圖6可看出,MEMS加速度計(jì)X、Y、Z軸的BP神經(jīng)網(wǎng)絡(luò)誤差補(bǔ)償?shù)慕Y(jié)果總在期望值上下有微小波動(dòng),而多元線性回歸的誤差補(bǔ)償結(jié)果雖然能代表期望輸出,但效果沒有BP神經(jīng)網(wǎng)絡(luò)預(yù)測的精度高。從表3的對比分析可以發(fā)現(xiàn),BP神經(jīng)網(wǎng)絡(luò)預(yù)測結(jié)果的均值和標(biāo)準(zhǔn)偏差都要比多元線性回歸預(yù)測的小。
4結(jié)束語
本文建立了一種基于BP神經(jīng)網(wǎng)絡(luò)的MEMS加速度計(jì)誤差補(bǔ)償模型,并與多元線性回歸補(bǔ)償結(jié)果比較,實(shí)驗(yàn)結(jié)果表明BP神經(jīng)網(wǎng)絡(luò)對加速度計(jì)誤差補(bǔ)償精度高。BP神經(jīng)網(wǎng)絡(luò)具有高效的曲線擬合功能和優(yōu)越的復(fù)雜非線性函數(shù)逼近能力等特點(diǎn),將其應(yīng)用在MEMS加速度計(jì)誤差補(bǔ)償上,證明是可行的,并且使精度提高了一個(gè)數(shù)量級,這為今后提高M(jìn)EMS加速度計(jì)誤差補(bǔ)償精度奠定了基礎(chǔ)。
