推動手推車的力學分析
2018-05-14 16:20:39劉凝劉喜軍
現代職業教育·高職高專 2018年5期
劉凝 劉喜軍

[摘 要] 推與拉是一種常見的力學現象,在日常生活中人們也經常遇到。從早期的人力車、畜力車到爬陡坡用的雙頭機車,人們對推與拉哪個更省力都有親身的體驗。有趣的是,在教育的不同階段,關于推與拉省力的問題有著不同的解釋。在《推動手推車的力學分析》中,試圖把理論分析與日常經驗相結合,得出一個較為合理的解釋。通過力學中的整體法,《推動手推車的力學分析》提出了在日常生活中“推比較省力”的觀點。通過建立模型,進一步提出了在設定條件下“拉與推所用力相等”的觀點。“拉比較省力”的觀點,是初等教育背景下易得出的結論。“無法判斷”拉與推哪種方法省力,是一個高等教育之上的問題,《推動手推車的力學分析》并不能找出實例,沒有得出結論。
[關 鍵 詞] 摩擦力;力學模型;連接體
[中圖分類號] G642 [文獻標志碼] A [文章編號] 2096-0603(2018)13-0137-03
一、引言
2011年3月,筆者參加了“2011年第二十一屆全國初中應用物理競賽”。第一題是單項選擇題,其中第2小題為工人師傅用手推手運送純凈水的圖片(圖1),對這兩種方法中哪種方法比較省力的判斷,下列說法中正確的是( )
A.圖甲的方法比較省力
B.圖乙的方法比較省力
C.圖甲和圖乙兩種方法所用力的大小相等
D.無法判斷
筆者選擇了B,而競賽后公布的標準答案是A。當時,參加完競賽考試,回家后討論了拉與推的問題;現在,筆者于大學四年級寒假期間,對拉與推的問題做了盡可能系統的分析,形成了更為全面的初步結論。
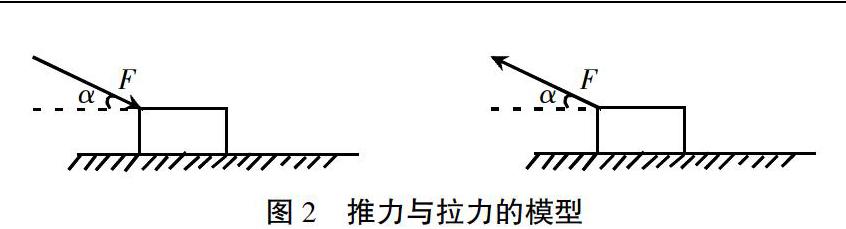
二、基于克服摩擦力的“拉的方法省力”
形成拉的方法省力的認識,肇始于對摩擦力的克服,需要有一個向上的分力。從向上分力有助于克服摩擦力的判斷,得出拉的方法省力的結論。(圖2)
三、基于克服阻力矩的“推的方法省力”
在使手推車運動的問題上,不是需要克服摩擦力,無論靜摩擦力,還是動摩擦力;而是需要克服滾動摩擦,即需要克服滾動形成的阻力,克服阻礙手推車小輪滾動的力矩。使手推車運動的力大小,由阻力矩決定,不是由靜摩擦力或動摩擦力決定。
同時,省力是對人而言,在使手推車運動的過程中,工人師傅付出的力的大小決定省力與否。在施加力于手推車之上時,存在重力問題。或者是手推車的重力由人承擔,這相當于拉的方法;或者是人的重力由手推車承擔,這相當于推的方法。判斷拉的方法是否省力,需要比較手推車與人這兩個相連的系統,看哪一個需要克服阻力的力更小。
一般認為,人的行走相當于多邊形的滾動,步幅的一半相當于阻力矩。從工人師傅用手推車運送純凈水的情景看,手推車是運動在起伏較小的水泥(或瀝青)路面上。手推車的阻力矩小于相當于步幅一半的人的阻力矩。得出手推車運動需要克服阻力的力更小,得出人的重力由手推車承擔更省力,得出推的方法更省力。反之,得出人需要克服阻力的力更大,得出手推車的重力由人承擔更費力,得出拉的方法更費力。
極端情況為,拉著手推車運動,向上角度增大,直到完全提起手推車,這相當于扛著手推車運動。推著手推車的極端情況為向下角度增大,直到完全壓在手推車上,這相當于坐在手推車上腳蹬著地運動。
四、基于重心無起伏模型的“拉與推所用力相等”
在理想狀態下,建立拉與推所用力相等的模型。
設路面無起伏,或者說起伏趨于無窮小。
對手推車,設定阻力矩為零,或者說趨于無窮小。得出重心運動軌跡與路面平行,得出手推車可以無阻力地運動。
對人的行走模型,具體如下:
(一)多邊形模型
一般認為,人的行走相當于多邊形的滾動。腿部被設定為單一剛桿。得出步幅的一半相當于阻力矩,阻力矩不為零,并較大。
(二)兩截剛桿腿部模型
行走的多邊形模型,其重心起伏較大,與實際行走情況差距較大,阻力矩太大。模擬實際行走,設置腿部為兩截剛桿。以此平緩多邊形模型的重心起伏,達到降低阻力矩的目的。
此兩截剛桿腿部模型(設兩截長度相等)的行走流程設定為:(1)起步。兩大腿平行,與重力夾角30°;左小腿與大腿成直線,右小腿與左小腿夾角60°。重心在右腿上。(2)重心移動。重心向前移動,腿部改變夾角。直到左大腿與重力夾角30°,小腿與重力夾角30°;右腿成直線,與重力夾角30°。重心在左腿上。(3)邁步。右小腿向前邁步,與左小腿夾角60°。重心仍在左腿上。與起步對稱。(4)重心移動。同(2),其中左腿變為右腿。(5)邁步。同(3),其中右腿變為左腿。
至此,經(2)重心移動—(3)邁步—(4)重心移動—(5)邁步,形成一個行走周期。接著可以繼續此周期。(1)起步與邁步對接;行走終止可中止于一個周期的任何一個環節,最后還原為起步狀態。
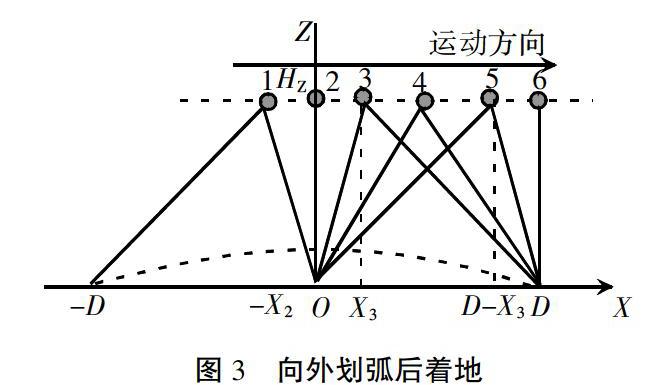
該兩截剛桿腿部模型的局限性,一是在重心移動環節,沒有設定“腿部改變夾角”的角度,無法避免重心起伏;二是在邁步環節,因為是簡化模型,沒有模擬人下肢的腳踝,邁步中表現為繞髖關節向外劃弧后著地(圖3)。
(三)連桿機構模型及拉與推手推車所用力相等
為克服兩截剛桿腿部模型的局限性,建立連桿機構模型。
1.連桿機構模型的建立
兩腿分別使用一套波舍利直線運動機構(Peaucellier-Lipkin linkage),或者霍肯直線運動機構(Hoeckens Linkage)。一腿的兩個端點固定在軀干上,另一腿對稱固定;軌跡為直線的點視為腳(圖4)。
2.連桿機構模型的行走設定及效果
兩腿交替行走,假設重心橫向移動為零,最大步幅是以軌跡為直線的點的極限,步幅可以是極限內的任意長度,不限定每一步幅長度。
在以上設定下,連桿機構模型重心運動軌跡與路面平行,得出連桿機構模型的阻力矩為零,得出連桿機構模型可以無阻力地運動。
3.連桿機構模型推手推車的運動狀況分析
(1)連桿機構模型增設手臂,推手推車時,設為單一剛桿,手掌摩擦力無窮大,單一剛桿可以從任意角度過手推車質心施力;拉手推車時,設為繩,繩可以從任意角度過手推車質心施力;無論推還是拉,連桿機構模型的手臂均具有單一剛桿及繩兩個功能。(2)設手推車質量為m;連桿機構模型質量為M,自由落體加速度為g。對手推車所施的力為F,連桿機構模型腳部靜摩擦力的反作用力為Ffoot,視為腳發力。手推車重力為Fgm,連桿機構模型重力為FgM。(3)對施力角度,建立平面直角坐標系XOY,設O為手推車質心,以X軸正向為0度,計算推車夾角θ。
在以上設的情況下,連桿機構模型推手推車的運動狀況為:
Ffoot=Fcosθ (1.1)
Fcosθ=(M+m)a (1.2)
Ffoot==(M+m)a (1.3)
(1.1)表明腳部發力,與連桿機構模型推力Fcosθ相等。(1.2)表明M及m由連桿機構模型、手推車分別的承擔力為多少,不影響運動狀況;M與m之和作為確定值,共同影響影響運動狀況。(1.3)表明腳部發力Ffoot,決定M+m的加速度a。
所以,發力大小及方向由Ffoot決定,F及θ只是傳導機構,不改變Ffoot發力的大小及方向;Ffoot影響M+m的運動狀況,決定a的大小。
4.連桿機構模型推手推車的省力狀況說明
省力與否,決定于一定的Ffoot之下a的大小。前面已經有結論Ffoot=(M+m)a,一定的Ffoot產生確定的a,二者成正比。F及θ只是傳導機構,不改變Ffoot發力的大小及方向,與省力與否無關。
區分推力角度不同的情況,具體說明如下:
(1)在第一象限,推力指向手推車質心O,與水平面呈一定角度θ(如30度)推車。部分M由手推車承擔。(2)θ順時針轉,直到X軸正向,推力指向手推車質心O,以0度推車。Fcos0=(M+m)a,F=(M+m)a,a與F成正比,F對a的影響達到最大值,最省力。(3)θ逆時針轉,直到90度。相當于坐。(4)θ逆時針轉,過0度,反方向運動。(5)θ順時針轉,過90度,相當于拉。(6)θ順時針轉,過90度,直到180度。相當于扛。(7)θ順時針轉,過180度,反方向運動。(8)θ順時針轉,繼續過180度,直到270度,反方向運動。同90度,但方向相反。(9)θ順時針轉,繼續過270度,與(4)相同。
以上為全方位(角度)360度。
以上推改為拉,二者的結果是一樣的。
俗話說:“背著抱著一般沉。”本文提出,在設定條件下,連桿機構模型拉與推手推車所用力相等,可推出一個匪夷所思的結論:“扛著坐著一般沉。”
實際中,列車在鐵軌上運行,重心起伏較為平緩,機車施力于車輛,拉與推區別不大。
五、初步結論及未盡問題
對第一種情況“拉的方法省力”,本文簡單明確了基于克服摩擦力,形成“拉的方法省力”的結論。對于第二種情況“推的方法省力”,本文分層次提出了重點。首先明確了阻力矩決定手推車運動的力。之后提出是否省力,需要比較手推車與人兩個系統,看哪一個需要克服阻力的力更小。最后列舉極端情況,扛著手推車與坐著手推車作比較。對第三種情況“拉與推所用力相等”,本文作了較為詳細的分析。一方面說明在理想狀態下,手推車可以無阻力地運動。另一方面,分析了人的行走模型,利用波舍利直線運動機構(及霍肯直線運動機構)建立了連桿機構模型,得出在設定條件下,拉與推手推車所用力相等的結論。最后,同樣列舉極端情況,機車在鐵軌上拉與推車輛區別不大。對第四種情況“無法判斷”拉與推哪種方法省力,筆者還不能提出實例,沒有能夠給出結論。
個人能力有限,此研究還有很多需要改進完善之處。如果將此問題展開研究是十分復雜的,例如,動摩擦如何向靜摩擦過渡,以及影響動摩擦與靜摩擦的參數有何關系,并且人所施加的力對它們有何影響,雙足行走模型與現實的差別,加上腳踝后施力方式的改變,等等。
參考文獻:
[1]哈爾濱工業大學理論力學教研室.理論力學[M].7版.北京:高等教育出版社,2009.
[2]李紅征.小型雙足機器人的行走研究[D].中國科學技術大學,2008.
[3]顧森.思考的樂趣[M].北京:人民郵電出版社,2012.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
兒童故事畫報(2019年5期)2019-05-26 14:26:14
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
核科學與工程(2015年4期)2015-09-26 11:59:03
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
